Você também pode gostar
- Biela ManivelaDocumento6 páginasBiela ManivelaAlfredo FrancaAinda não há avaliações
- Mecanismos Aulas ApostilaDocumento33 páginasMecanismos Aulas ApostilaAlexandre Corso100% (1)
- Relatorio BancadaDocumento14 páginasRelatorio BancadaRenato PortoAinda não há avaliações
- Mecanismos TrabalhoDocumento42 páginasMecanismos TrabalhoDennison Santos100% (1)
- Dimensionamento de sistema de direção pinhão e cremalheira para veículo BajaDocumento44 páginasDimensionamento de sistema de direção pinhão e cremalheira para veículo BajaFelipe Rover0% (2)
- Aula - Análise Vetorial de Velocidades PDFDocumento3 páginasAula - Análise Vetorial de Velocidades PDFbetow_Ainda não há avaliações
- Capitulo 4b PDFDocumento29 páginasCapitulo 4b PDFDeividi CardosoAinda não há avaliações
- Seleção de Materiais 2016Documento69 páginasSeleção de Materiais 2016Fernanda DiasAinda não há avaliações
- Prova 2016 Maquinas TermicasDocumento2 páginasProva 2016 Maquinas TermicasFernanda CostaAinda não há avaliações
- Perda de Carga em Sistemas de BombeamentoDocumento18 páginasPerda de Carga em Sistemas de BombeamentoLucas BorgesAinda não há avaliações
- Seleção de material para barras paralelas em fisioterapiaDocumento25 páginasSeleção de material para barras paralelas em fisioterapiaEmerson RenneAinda não há avaliações
- Geradores de Vapor e Caldeiras: Tipos e Desenvolvimento HistóricoDocumento20 páginasGeradores de Vapor e Caldeiras: Tipos e Desenvolvimento HistóricoNelson Sanches TchimbaliAinda não há avaliações
- Guia para Calculo 2 - Engrenagens 130607 PDFDocumento17 páginasGuia para Calculo 2 - Engrenagens 130607 PDFLahire Solér JuniorAinda não há avaliações
- Cisalhamento Transversal - ExercíciosDocumento2 páginasCisalhamento Transversal - ExercíciosocurbruxAinda não há avaliações
- Exercícios de Fadiga Elementos de Máquinas I - ME5510 e NM7510 Elementos de Máquinas II (AC) - ME8520 Prof. Dr. William MalufDocumento37 páginasExercícios de Fadiga Elementos de Máquinas I - ME5510 e NM7510 Elementos de Máquinas II (AC) - ME8520 Prof. Dr. William MalufYuri MolgadoAinda não há avaliações
- Análise de Posição e Velocidade em Um Mecanismo de Quatro BarrasDocumento14 páginasAnálise de Posição e Velocidade em Um Mecanismo de Quatro BarrasDanrleyLimaAinda não há avaliações
- Perda de carga em tubulaçõesDocumento14 páginasPerda de carga em tubulaçõesLucas Da Costa MouraoAinda não há avaliações
- Diâmetro EconômicosDocumento16 páginasDiâmetro EconômicosElton Neves da SilvaAinda não há avaliações
- Projeto de Compressor CentrifugoDocumento78 páginasProjeto de Compressor Centrifugoalexandreburan100% (1)
- (MTPC) Lista de Exercícios 1 - Trocadores de CalorDocumento3 páginas(MTPC) Lista de Exercícios 1 - Trocadores de CalorIago Freitas0% (1)
- Prob Cap2 DMV 2osemDocumento9 páginasProb Cap2 DMV 2osemGustavo MollicaAinda não há avaliações
- SelasDocumento62 páginasSelasGMacellaAinda não há avaliações
- Transferência de calor em superfícies estendidas com aletasDocumento8 páginasTransferência de calor em superfícies estendidas com aletasLetícia Rosa100% (1)
- Cisalhamento em Vigas: Fórmula e FluxoDocumento21 páginasCisalhamento em Vigas: Fórmula e FluxoRodrigo SilvaAinda não há avaliações
- Exercícios de mecanismos articuladosDocumento9 páginasExercícios de mecanismos articuladosDanilo AzevedoAinda não há avaliações
- Transferência de Calor II: Considerações Fluidodinâmicas e TérmicasDocumento44 páginasTransferência de Calor II: Considerações Fluidodinâmicas e TérmicasMatheus Prado Cardoso100% (1)
- Sistemas Termicos B Aula 2 BimestreDocumento15 páginasSistemas Termicos B Aula 2 BimestreAndré ZagottisAinda não há avaliações
- Trabalho de Motores ElétricosDocumento16 páginasTrabalho de Motores ElétricosYago AraújoAinda não há avaliações
- Hidráulica e Pneumática CEFET-CEDocumento137 páginasHidráulica e Pneumática CEFET-CEJosé LimaAinda não há avaliações
- PUCPR energia balanços introduçãoDocumento17 páginasPUCPR energia balanços introduçãogumerssindo100% (1)
- Escoamento Interno - Transferência de CalorDocumento62 páginasEscoamento Interno - Transferência de CalorJose Pereira A. Jr.Ainda não há avaliações
- Simulação Ensaio de Tração UniaxialDocumento4 páginasSimulação Ensaio de Tração UniaxialRui CostaAinda não há avaliações
- HIDRODINAMICADocumento6 páginasHIDRODINAMICAMichel Maia0% (1)
- Estudo experimental da transferência de calor em aletas de latão e açoDocumento10 páginasEstudo experimental da transferência de calor em aletas de latão e açoLucas SuzukiAinda não há avaliações
- Dimensionamento de Um Sistema PneumáticoDocumento8 páginasDimensionamento de Um Sistema PneumáticohelderlpAinda não há avaliações
- 16 EER0013 - Aula 16 - Transferncia de Calor em CaldeirasDocumento22 páginas16 EER0013 - Aula 16 - Transferncia de Calor em CaldeirasMatheus FaveroAinda não há avaliações
- Sistema Biela Manivela: Vetores Aceleração dos Elos AB e BCDocumento2 páginasSistema Biela Manivela: Vetores Aceleração dos Elos AB e BCJames Amorim100% (1)
- Aula 3 - Transmissões - EngrenagensDocumento37 páginasAula 3 - Transmissões - Engrenagenslucasterrivel100% (1)
- Lista 4 Termo IIDocumento1 páginaLista 4 Termo IIGoes EzequielAinda não há avaliações
- Sistemas de Refrigeração: Diagramas PH e COPDocumento6 páginasSistemas de Refrigeração: Diagramas PH e COPJovArarasPorJesusAinda não há avaliações
- Tradução Da Norma B29 ASMEDocumento22 páginasTradução Da Norma B29 ASMEFelipeeAinda não há avaliações
- Cálculos para estampagem de calotas de botijão P13Documento10 páginasCálculos para estampagem de calotas de botijão P13Engemec5Ainda não há avaliações
- Vibrações em sistemas mecânicosDocumento66 páginasVibrações em sistemas mecânicosfagnermatosAinda não há avaliações
- 7 Transdutores Piezoelétricos e suas AplicaçõesDocumento18 páginas7 Transdutores Piezoelétricos e suas AplicaçõesDanilo JúniorAinda não há avaliações
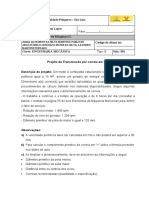
- Projeto de transmissão por correia em VDocumento4 páginasProjeto de transmissão por correia em VFernando Jadão100% (1)
- TM 181 – Máquinas Térmicas II: Lista de Exercícios IDocumento13 páginasTM 181 – Máquinas Térmicas II: Lista de Exercícios ImaathheusAinda não há avaliações
- Apostila de MecanismosDocumento66 páginasApostila de MecanismosPedro ViníciusAinda não há avaliações
- 6 Sigma avaliação retenção conteúdoDocumento6 páginas6 Sigma avaliação retenção conteúdoMarluce Cristina Moraes DezorziAinda não há avaliações
- Teorias de FalhaDocumento40 páginasTeorias de FalhaPermutante BMAinda não há avaliações
- Lista exercícios termodinâmica TCCDocumento1 páginaLista exercícios termodinâmica TCCEloisa Fernanda FregattoAinda não há avaliações
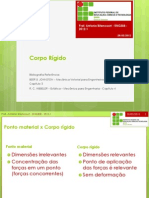
- Ponto material x Corpo rígidoDocumento64 páginasPonto material x Corpo rígidoSherazadelira0% (1)
- Máquinas Térmicas - Lista de Exercícios (Ciclo Brayton)Documento2 páginasMáquinas Térmicas - Lista de Exercícios (Ciclo Brayton)Airton Souza0% (1)
- Tratamentos térmicos em aço médio carbonoDocumento26 páginasTratamentos térmicos em aço médio carbonoLorena MeloAinda não há avaliações
- Motores a gás e turbinasDocumento37 páginasMotores a gás e turbinasEdvan MouraAinda não há avaliações
- NBR 12298 - 95 - Representação de Área de Corte Por Meio de Hachuras em Desenho Técnico - 3pagDocumento3 páginasNBR 12298 - 95 - Representação de Área de Corte Por Meio de Hachuras em Desenho Técnico - 3pagClaudio Lorenzoni100% (1)
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Fundamentos e aplicações da psicrometriaNo EverandFundamentos e aplicações da psicrometriaAinda não há avaliações
- Esp Tec AntipanicoDocumento2 páginasEsp Tec AntipanicoromasidAinda não há avaliações
- Energia HídricaDocumento1 páginaEnergia HídricaromasidAinda não há avaliações
- Exercício 6° Ano de 13 A 17 Do 03Documento3 páginasExercício 6° Ano de 13 A 17 Do 03romasidAinda não há avaliações
- Cur So Robotic ADocumento2 páginasCur So Robotic AromasidAinda não há avaliações
- Comp 10Documento12 páginasComp 10Danilo CapistranoAinda não há avaliações
- Industria Robotica 2012Documento1 páginaIndustria Robotica 2012romasidAinda não há avaliações
- Utilização Do MatlabDocumento4 páginasUtilização Do MatlabromasidAinda não há avaliações
- Diagramas BracoDocumento7 páginasDiagramas BracoromasidAinda não há avaliações
- WEG Rele Programavel Clic 02 3rd Manual Portugues BRDocumento216 páginasWEG Rele Programavel Clic 02 3rd Manual Portugues BRnerocrAinda não há avaliações
- Arduino + ServomotorDocumento2 páginasArduino + ServomotorromasidAinda não há avaliações
- Aula10 SEM0104Documento29 páginasAula10 SEM0104romasidAinda não há avaliações
- Arduino + ServomotorDocumento2 páginasArduino + ServomotorromasidAinda não há avaliações
- Modelo TCC EstagioDocumento14 páginasModelo TCC EstagioromasidAinda não há avaliações
- Aula 1 SEM0104 2012Documento48 páginasAula 1 SEM0104 2012romasidAinda não há avaliações
- Artigo Tecnico MecanismosDocumento1 páginaArtigo Tecnico MecanismosromasidAinda não há avaliações
- Protótipo de Um ManipuladorDocumento67 páginasProtótipo de Um ManipuladorromasidAinda não há avaliações
- Motor Universal Corrente ContinuaDocumento9 páginasMotor Universal Corrente ContinuaRogério CorreiaAinda não há avaliações
- MquinaCC v1Documento48 páginasMquinaCC v1Zing ZongAinda não há avaliações
- TRIACDocumento9 páginasTRIACromasidAinda não há avaliações
- LogoComfort PTDocumento108 páginasLogoComfort PTRonaldo MoinhoAinda não há avaliações
- Resumo UsinagemDocumento13 páginasResumo UsinagemlaurindoflAinda não há avaliações
- Arduino + ServomotorDocumento2 páginasArduino + ServomotorromasidAinda não há avaliações
- Introdução ao MatlabDocumento29 páginasIntrodução ao MatlabGuilherme GoraiebAinda não há avaliações
- TiagoDocumento23 páginasTiagoerickcrazy_2008Ainda não há avaliações
- SS Teorica 3 2007 8 Sem 2Documento13 páginasSS Teorica 3 2007 8 Sem 2romasidAinda não há avaliações
- Apresentação 1Documento3 páginasApresentação 1romasidAinda não há avaliações
- Materiais Utilizados Na Industria Eléctrica e ElectrónicaDocumento8 páginasMateriais Utilizados Na Industria Eléctrica e ElectrónicaromasidAinda não há avaliações
- IntroduçãoDocumento5 páginasIntroduçãoromasidAinda não há avaliações
- Motor Universal Corrente ContinuaDocumento9 páginasMotor Universal Corrente ContinuaRogério CorreiaAinda não há avaliações