Você também pode gostar
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysAinda não há avaliações
- b13 Guidage en RotationDocumento7 páginasb13 Guidage en Rotationncibm67% (3)
- TD 2 EngrenagesDocumento4 páginasTD 2 EngrenagesPFEAinda não há avaliações
- Cours EngrenagesDocumento5 páginasCours EngrenagesJesuis ContentAinda não há avaliações
- 34 Reducteur PDFDocumento2 páginas34 Reducteur PDFkhocine67% (6)
- SciesauteusecorrectionDocumento3 páginasSciesauteusecorrectionyumiAinda não há avaliações
- Embrayages Frein 10 11 12Documento7 páginasEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- TD ConstructionDocumento6 páginasTD ConstructionYoussef TrimechAinda não há avaliações
- Chariot Longitudinal Micro-Fraiseuse (Act 2-3)Documento1 páginaChariot Longitudinal Micro-Fraiseuse (Act 2-3)MIMFS50% (2)
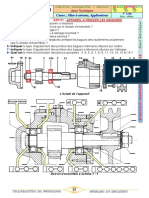
- Accouplements Embrayage ApplicationsDocumento5 páginasAccouplements Embrayage ApplicationsdjalikadjouAinda não há avaliações
- Travaux DirigesDocumento32 páginasTravaux Dirigestarik outalAinda não há avaliações
- 08 Maquette Embrayag DisqueDocumento5 páginas08 Maquette Embrayag Disquederwiche100% (1)
- 01 Résumé TransmettreDocumento27 páginas01 Résumé Transmettrephy100% (2)
- TD Limiteur de CoupleDocumento2 páginasTD Limiteur de CoupleHamami Aymen100% (2)
- Chariot Micro Tour (Act 3-3)Documento1 páginaChariot Micro Tour (Act 3-3)MIMFS100% (1)
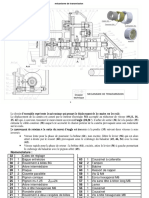
- Sujet 5 Mecanisme de TransmissionDocumento6 páginasSujet 5 Mecanisme de TransmissionBOUREIMA ZOGONAAinda não há avaliações
- COURS AccouplementsDocumento10 páginasCOURS AccouplementsGana100% (1)
- Transformation de MVTDocumento24 páginasTransformation de MVTMIMFS91% (11)
- Exercices EngrenagesDocumento15 páginasExercices EngrenagesmandazrouAinda não há avaliações
- Exercice 3-ConvertiDocumento3 páginasExercice 3-Convertichaouachi alarbiAinda não há avaliações
- EPREUVE TERMINALE CONSTRUSTION MECANIQUE (Enregistré Automatiquement) (Enregistré Automatiquement)Documento10 páginasEPREUVE TERMINALE CONSTRUSTION MECANIQUE (Enregistré Automatiquement) (Enregistré Automatiquement)etoumbe Alfred100% (3)
- 09 Maquette Boite VitessesDocumento7 páginas09 Maquette Boite VitessesBrahim Achayfad100% (1)
- 01 Tour ParalleleDocumento7 páginas01 Tour ParallelekhocineAinda não há avaliações
- TD2 - Accouplement - Correction Inverseur de MarcheDocumento6 páginasTD2 - Accouplement - Correction Inverseur de MarcheAbdelkhalek SaidiAinda não há avaliações
- Sujet 4 Mecanisme Dentrainement Du Tapis CorrectionDocumento5 páginasSujet 4 Mecanisme Dentrainement Du Tapis CorrectionBOUREIMA ZOGONA100% (1)
- Guidage en Rotation ApplicationsDocumento7 páginasGuidage en Rotation ApplicationsAli Akoumiste100% (4)
- Exercice-3 220616 222847Documento6 páginasExercice-3 220616 222847HamzaAinda não há avaliações
- Chapitre 5 Transmission Puissance EngrenagesDocumento14 páginasChapitre 5 Transmission Puissance EngrenagesDhaouadi AymenAinda não há avaliações
- Controle Acc Emb FreinDocumento7 páginasControle Acc Emb FreinkhayachiAinda não há avaliações
- Met T 25 TD PDocumento4 páginasMet T 25 TD Pkhocine67% (3)
- Transmission de Puissamce PDFDocumento82 páginasTransmission de Puissamce PDFkhocine75% (4)
- Exercice Visserie Boulonnerie eDocumento3 páginasExercice Visserie Boulonnerie eKaoutar alaoui100% (3)
- TD 16 Corrigé - Liaisons - Schéma CinématiqueDocumento5 páginasTD 16 Corrigé - Liaisons - Schéma Cinématiquelfadli67% (3)
- Exercice Limiteur de CoupleDocumento4 páginasExercice Limiteur de CoupleMortadha Rabah100% (1)
- 19 Reducteur MultiplicateurDocumento10 páginas19 Reducteur MultiplicateurYoussef Trimech100% (3)
- Repdes AppDocumento15 páginasRepdes Appkuzgun cebeciAinda não há avaliações
- 13 9 TD - Transmission PDFDocumento10 páginas13 9 TD - Transmission PDFRanya ouherrouAinda não há avaliações
- Devoir de Synthese N3F 1sDocumento8 páginasDevoir de Synthese N3F 1sKadri Mongi100% (1)
- Cours EngrenageDocumento6 páginasCours EngrenageMohsen LaabidiAinda não há avaliações
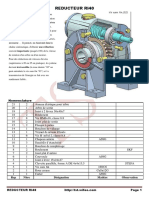
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDocumento6 páginasREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- 2STM CoursDocumento83 páginas2STM CoursOUTEMSAA100% (1)
- 10 Accouplements TemporairesDocumento20 páginas10 Accouplements Temporaireszouhour brahmi100% (1)
- Ferme Porte GROOM (Corrigé)Documento7 páginasFerme Porte GROOM (Corrigé)Soumeya Machta100% (1)
- Les Guidages en RotationDocumento54 páginasLes Guidages en RotationJaksMaksAinda não há avaliações
- 03 - Transmission Du MouvementDocumento7 páginas03 - Transmission Du Mouvementjaar100% (1)
- Roues de FrictionDocumento2 páginasRoues de FrictionKamel Bousnina0% (1)
- CPI1 CONST TD Exercices EngrenagesDocumento4 páginasCPI1 CONST TD Exercices Engrenagesyassine lakhalAinda não há avaliações
- Devoir Engrenages eDocumento8 páginasDevoir Engrenages esb ali100% (1)
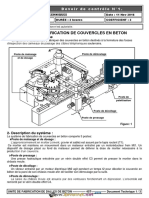
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenDocumento7 páginasDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenKämîŁyä Nádïta100% (1)
- Transformation Des Mvts 10-11Documento4 páginasTransformation Des Mvts 10-11MIMFS100% (2)
- TechniqueDocumento8 páginasTechniqueFredj Kriaa100% (2)
- Evaluation - Ajustements - Vrin Bosch - LvesDocumento6 páginasEvaluation - Ajustements - Vrin Bosch - Lveskililibenali100% (1)
- Dossier Réponse CorrigéDocumento5 páginasDossier Réponse CorrigéMrnadhir MecaniqueAinda não há avaliações
- Boite de VitesseDocumento8 páginasBoite de VitesseHamami AymenAinda não há avaliações
- Manuel de L'Utilisateur Panneau de Contrôle Simplex/Duplex Cable 1-2 Vitesses Processeur Cj1M SÉRIE J12-1000 CODE B44-07 J12-1000 C1V/C2V FRDocumento102 páginasManuel de L'Utilisateur Panneau de Contrôle Simplex/Duplex Cable 1-2 Vitesses Processeur Cj1M SÉRIE J12-1000 CODE B44-07 J12-1000 C1V/C2V FRDjelloul AbdelhadiAinda não há avaliações
- Commande Vectorielle Des Machines Asynchrones & SynchronesDocumento74 páginasCommande Vectorielle Des Machines Asynchrones & SynchronesAymen Chaaira100% (2)
- KSB Determination Des Pompes Centrifuges FRDocumento96 páginasKSB Determination Des Pompes Centrifuges FRCamille Aquilon83% (6)
- TD Vis EcrouDocumento3 páginasTD Vis EcrouHoussam Had33% (3)
- TD Vis EcrouDocumento3 páginasTD Vis EcrouHoussam Had100% (1)
- GeometrieDocumento144 páginasGeometrieGuilhem BatoAinda não há avaliações
- EP1340612A1Documento15 páginasEP1340612A1IFOM IndusAinda não há avaliações
- Peugeot 206 GRNDocumento93 páginasPeugeot 206 GRNjlee_296737Ainda não há avaliações
- Moteur DieselDocumento42 páginasMoteur DieselWalid Necib100% (4)
- SEBP4436!00!01-ALL Parts ManualDocumento523 páginasSEBP4436!00!01-ALL Parts ManualdefiunikasungtiAinda não há avaliações
- Boîte de Vitesses Manuelle MTX75 À 5 Rapports: CaractéristiquesDocumento5 páginasBoîte de Vitesses Manuelle MTX75 À 5 Rapports: Caractéristiquestoni13021302Ainda não há avaliações
- Caractéristiques: GénéralitésDocumento3 páginasCaractéristiques: GénéralitéssmAinda não há avaliações
- BM 1 Moteur Diesel WebDocumento50 páginasBM 1 Moteur Diesel WebWilly tsatyAinda não há avaliações
- Treuils Et GuindeauxDocumento3 páginasTreuils Et GuindeauxNacer RezaliAinda não há avaliações
- 3 Dem Remont Petits MoteursDocumento7 páginas3 Dem Remont Petits Moteurs9274Ainda não há avaliações
- Cahier Meca 4 ST PDFDocumento150 páginasCahier Meca 4 ST PDFtayahi100% (1)
- Gen.0000000005052 Service Manual 2016-2017 Lyrik Rev D FrenchDocumento46 páginasGen.0000000005052 Service Manual 2016-2017 Lyrik Rev D FrenchGuillaume FoubertAinda não há avaliações
- 854KDocumento1.115 páginas854KGomez Gallardo Andres100% (1)
- Roue Rochet A1 44 A1 - 44 Lmod1Documento1 páginaRoue Rochet A1 44 A1 - 44 Lmod1ayoub fsaAinda não há avaliações
- Ford Focus - PDF - Piston - MachineDocumento326 páginasFord Focus - PDF - Piston - Machinesidi lamineAinda não há avaliações
- Filetage - Tarodage - Assemblage PDFDocumento13 páginasFiletage - Tarodage - Assemblage PDFamrAinda não há avaliações
- Visserie BasesDocumento9 páginasVisserie BasesgatAinda não há avaliações
- 1 Manual de Partes ARS 122Documento216 páginas1 Manual de Partes ARS 122CésarAinda não há avaliações
- Devoir de Synthèse N°1 - Technologie - 2ème Technique (2022-2023) MR ZOUAGHI AbdelmajidDocumento8 páginasDevoir de Synthèse N°1 - Technologie - 2ème Technique (2022-2023) MR ZOUAGHI AbdelmajidAhmedAinda não há avaliações
- 3 434 3021 00 PDFDocumento1 página3 434 3021 00 PDFRASOUL KHADIBIAinda não há avaliações
- Pendule de Pohl (Réparé) .Docx Version 1Documento16 páginasPendule de Pohl (Réparé) .Docx Version 1Mr AhmedAinda não há avaliações
- Devoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhDocumento8 páginasDevoir de Contrôle N°2 - Génie Mécanique - Mécanisme D'entrainement Du Plateau Tournant - Bac Technique (2017-2018) MR MR GHORBEL MamdouhAmira JebaliAinda não há avaliações
- Cours 06+ 07 (17-05-2020)Documento3 páginasCours 06+ 07 (17-05-2020)Sana DanaAinda não há avaliações
- DVDocumento7 páginasDVlachhelAinda não há avaliações
- Gamme Sms PDF 1 68 Mo Serie61 Lser1Documento46 páginasGamme Sms PDF 1 68 Mo Serie61 Lser1Manuel Ferraz AlvesAinda não há avaliações
- Rapport de Stage ANASSDocumento33 páginasRapport de Stage ANASSAyoub HassnonAinda não há avaliações
- Moteur RotatifDocumento7 páginasMoteur RotatifDm MdAinda não há avaliações
- 01 0 Serre Joint CorrectionDocumento4 páginas01 0 Serre Joint CorrectionTesteur MohammediaAinda não há avaliações
- Etude Energetique Du Winch LewmarDocumento14 páginasEtude Energetique Du Winch LewmarsedmorabetAinda não há avaliações
- Grundfosliterature 3279168Documento17 páginasGrundfosliterature 3279168ASDOAinda não há avaliações