Você também pode gostar
- Numerical Solutions of Boundary Value Problems for Ordinary Differential EquationsNo EverandNumerical Solutions of Boundary Value Problems for Ordinary Differential EquationsA.K. AzizAinda não há avaliações
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationAinda não há avaliações
- Biomedical Image ProcessingDocumento3 páginasBiomedical Image ProcessingfarsunAinda não há avaliações
- Automatic Load Frequency Control of Multi-Area Power System Using ANN Controller and Genetic AlgorithmDocumento8 páginasAutomatic Load Frequency Control of Multi-Area Power System Using ANN Controller and Genetic AlgorithmseventhsensegroupAinda não há avaliações
- Ohm Laws and Wire ResistivityDocumento17 páginasOhm Laws and Wire Resistivitysari wahyuniAinda não há avaliações
- MATLAB Chapter 1: An Overview of MATLABDocumento152 páginasMATLAB Chapter 1: An Overview of MATLABHusseinHazimeAinda não há avaliações
- Noise and InterferenceDocumento49 páginasNoise and InterferenceDhananjay ThakurAinda não há avaliações
- Matlab Tutorial NelsonDocumento70 páginasMatlab Tutorial NelsonAaqibali LudhianviAinda não há avaliações
- Coordination of Relays, Reclosers, and Sectionalizing Fuses For Overhead Lines in The Oil PatchDocumento8 páginasCoordination of Relays, Reclosers, and Sectionalizing Fuses For Overhead Lines in The Oil PatchluhusapaAinda não há avaliações
- Communication SystemDocumento13 páginasCommunication SystemSyieda ZamryAinda não há avaliações
- Questions Papers M.techDocumento299 páginasQuestions Papers M.techRavikiran JadhavAinda não há avaliações
- History of Engineering - Paul H WrightDocumento19 páginasHistory of Engineering - Paul H WrightAlejandro Botero GarciaAinda não há avaliações
- Advance MathematicsDocumento94 páginasAdvance Mathematicskujong agacerAinda não há avaliações
- Lightning Protection Analysis of LRT DC OCSDocumento9 páginasLightning Protection Analysis of LRT DC OCSnbashir786Ainda não há avaliações
- Chapter 2 - Laplace Transform PDFDocumento34 páginasChapter 2 - Laplace Transform PDFSritaran BalakrishnanAinda não há avaliações
- Math 328 Module 1 Fourier SeriesDocumento26 páginasMath 328 Module 1 Fourier SeriesMelchor Jaramilla OronosAinda não há avaliações
- Unit IDocumento48 páginasUnit IManochandar ThenralmanoharanAinda não há avaliações
- Prestressed Concrete Assignment TU DelftDocumento4 páginasPrestressed Concrete Assignment TU DelfttimsykiAinda não há avaliações
- Nature Inspired OptimizationDocumento33 páginasNature Inspired Optimizationjason connorAinda não há avaliações
- 5 - Electrical Breakdown in GasesDocumento147 páginas5 - Electrical Breakdown in Gasesatik jawadAinda não há avaliações
- Transmission Lines and WaveguidesDocumento1 páginaTransmission Lines and WaveguidesVinayAinda não há avaliações
- Projectwise Design Integration: Connect Edition Update 3.2Documento262 páginasProjectwise Design Integration: Connect Edition Update 3.2Daria GlagolAinda não há avaliações
- Structural Optimization Using Evolutionary Algorithms PDFDocumento19 páginasStructural Optimization Using Evolutionary Algorithms PDFAyad SlabyAinda não há avaliações
- Ovn MainDocumento54 páginasOvn MainAvenir BajraktariAinda não há avaliações
- ﻻا ﻼﺛﻟا مﺳ:ﻲﺛ:ﺔﺑﻌﺷ General: Asst. Prof. Awadh E. Ajeel 4 Year Stage Structural Analysis and Design of Concrete BridgesDocumento4 páginasﻻا ﻼﺛﻟا مﺳ:ﻲﺛ:ﺔﺑﻌﺷ General: Asst. Prof. Awadh E. Ajeel 4 Year Stage Structural Analysis and Design of Concrete BridgesShahad R AsaðAinda não há avaliações
- Discrete Time Signal Processing 2ed OppenheimDocumento4 páginasDiscrete Time Signal Processing 2ed OppenheimWaqas AhmedAinda não há avaliações
- PHD Mnit JaipurDocumento199 páginasPHD Mnit JaipurAlka DubeyAinda não há avaliações
- Convolution and CorrelationDocumento23 páginasConvolution and CorrelationNeslynAinda não há avaliações
- CuckooDocumento9 páginasCuckooshaliniAinda não há avaliações
- 17 Redundancy Avoidance For Big Data in Data CentersDocumento3 páginas17 Redundancy Avoidance For Big Data in Data CentersBaranishankar100% (1)
- Principle of Communications Angle Modulation: Intro To Frequency ModulationDocumento7 páginasPrinciple of Communications Angle Modulation: Intro To Frequency ModulationEunice Jane Bolgado-DoctorAinda não há avaliações
- Newton Raphson MethodDocumento36 páginasNewton Raphson MethodAkansha YadavAinda não há avaliações
- Signals and Systems Using MatlabDocumento68 páginasSignals and Systems Using MatlabSavio S100% (6)
- NotesDocumento43 páginasNotespriya dharshiniAinda não há avaliações
- Newton MethodDocumento25 páginasNewton MethodThích Toán HọcAinda não há avaliações
- Ec2034 TV PDFDocumento171 páginasEc2034 TV PDFHrishikesh Deshpande100% (3)
- Crime Rate PredictionDocumento26 páginasCrime Rate PredictionbsdrinkuAinda não há avaliações
- Week 1 - Iot - Assignment 1 - AnsDocumento3 páginasWeek 1 - Iot - Assignment 1 - Ansdude RohitAinda não há avaliações
- "Virtual Instrumentation": Dr. Jovitha JeromeDocumento41 páginas"Virtual Instrumentation": Dr. Jovitha JeromeRavichandranAinda não há avaliações
- Newton Raphson Method PDFDocumento5 páginasNewton Raphson Method PDFGerardo Alfredo Encarnacion RamirezAinda não há avaliações
- ELEC E8409 Answers 2Documento8 páginasELEC E8409 Answers 2Ismail DriouchAinda não há avaliações
- Detection of Fault Location in Transmission Line Using Internet of Things (Iot)Documento3 páginasDetection of Fault Location in Transmission Line Using Internet of Things (Iot)Journal 4 ResearchAinda não há avaliações
- Fire Detection Using Embedded SystemsDocumento2 páginasFire Detection Using Embedded Systemsnikhilvishwa100% (1)
- Importance of Active Filters For Improvement of Power QualityDocumento8 páginasImportance of Active Filters For Improvement of Power QualityseventhsensegroupAinda não há avaliações
- Numerical Methods Solved ExamplesDocumento11 páginasNumerical Methods Solved ExamplesChristed aljo barrogaAinda não há avaliações
- A1: Free Oscillations: A1.1 Introduction To MotionDocumento48 páginasA1: Free Oscillations: A1.1 Introduction To MotionShivang Mishra100% (1)
- Nonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiDocumento19 páginasNonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiMustafa KösemAinda não há avaliações
- Revison of Maxwell EquationsDocumento15 páginasRevison of Maxwell Equationsibbi_7Ainda não há avaliações
- PSD Autocorrelation NoiseDocumento7 páginasPSD Autocorrelation NoiseM MovAinda não há avaliações
- Critical Section Service by A Preemptive ModelDocumento17 páginasCritical Section Service by A Preemptive Modeldugguz100% (1)
- Electronics Lab ReportDocumento7 páginasElectronics Lab ReportMr_asad_20Ainda não há avaliações
- MATLAB Program For Solution Power Flow Gauss-Seidel Method - EE1404 - Power System Simulation LaboratoryDocumento4 páginasMATLAB Program For Solution Power Flow Gauss-Seidel Method - EE1404 - Power System Simulation LaboratoryAmlan Chakravorty0% (1)
- Ch2 Wiener FiltersDocumento80 páginasCh2 Wiener Filtersashutosh199625Ainda não há avaliações
- Four Series Unit IDocumento32 páginasFour Series Unit IkausikraamAinda não há avaliações
- Ubiquitous Computing 1 (An Introduction)Documento27 páginasUbiquitous Computing 1 (An Introduction)arpan47Ainda não há avaliações
- Complete+thesis+Report MergedDocumento68 páginasComplete+thesis+Report Mergeddiptadip_maitiAinda não há avaliações
- Numericke Metode U Inzenjerstvu Predavanja 1Documento90 páginasNumericke Metode U Inzenjerstvu Predavanja 1Dzenan HasanbasicAinda não há avaliações
- Bisection MethodDocumento9 páginasBisection MethodAtika Mustari SamiAinda não há avaliações
- Chbe 553 Notes 1Documento6 páginasChbe 553 Notes 1सुबेदी गौरवAinda não há avaliações
- Roots of Equation PDFDocumento10 páginasRoots of Equation PDFMia ManguiobAinda não há avaliações
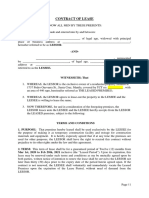
- Land Lease Contract DraftDocumento6 páginasLand Lease Contract DraftIvan KendrikAinda não há avaliações
- REQUEST LETTER To PLDTDocumento1 páginaREQUEST LETTER To PLDTIvan KendrikAinda não há avaliações
- Request LetterDocumento1 páginaRequest LetterIvan KendrikAinda não há avaliações
- SERVICE AGREEMENT CONTRACT (AutoRecovered)Documento3 páginasSERVICE AGREEMENT CONTRACT (AutoRecovered)Ivan KendrikAinda não há avaliações
- CAS-B037-0919-4 Professional Indemnity For Specific ProjectsDocumento8 páginasCAS-B037-0919-4 Professional Indemnity For Specific ProjectsIvan KendrikAinda não há avaliações
- Installation of Birds Control W PhotographDocumento5 páginasInstallation of Birds Control W PhotographIvan KendrikAinda não há avaliações
- CAS-B037-0919-4 Professional Indemnity For Specific ProjectsDocumento8 páginasCAS-B037-0919-4 Professional Indemnity For Specific ProjectsIvan KendrikAinda não há avaliações
- Meralco Schedule of Loads DocumentsDocumento5 páginasMeralco Schedule of Loads DocumentsIvan KendrikAinda não há avaliações
- C-05 EKC Control DiagramDocumento1 páginaC-05 EKC Control DiagramIvan KendrikAinda não há avaliações
- Emergency Room EquipmentsDocumento1 páginaEmergency Room EquipmentsIvan KendrikAinda não há avaliações
- Plants and AnimalsDocumento17 páginasPlants and AnimalsIvan KendrikAinda não há avaliações
- January 1-15 AttendanceDocumento6 páginasJanuary 1-15 AttendanceIvan KendrikAinda não há avaliações
- Medical Equipment Turnover LetterDocumento1 páginaMedical Equipment Turnover LetterIvan KendrikAinda não há avaliações
- JumongRetro (New) 2019 Brochure (Outlined)Documento2 páginasJumongRetro (New) 2019 Brochure (Outlined)Ivan KendrikAinda não há avaliações
- Fire SuppressionDocumento4 páginasFire SuppressionIvan KendrikAinda não há avaliações
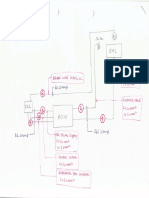
- Electrical Wiring DiagramDocumento1 páginaElectrical Wiring DiagramIvan KendrikAinda não há avaliações
- Contractors Agreement Dol 054 KbiDocumento15 páginasContractors Agreement Dol 054 KbiIvan KendrikAinda não há avaliações
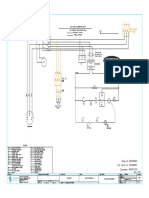
- Refrigeration Control DiagramDocumento1 páginaRefrigeration Control DiagramIvan KendrikAinda não há avaliações
- Refrigeration Control DiagramDocumento1 páginaRefrigeration Control DiagramIvan KendrikAinda não há avaliações
- C-06 EKC Control DiagramDocumento1 páginaC-06 EKC Control DiagramIvan KendrikAinda não há avaliações
- Refrigeration Control DiagramDocumento1 páginaRefrigeration Control DiagramIvan KendrikAinda não há avaliações
- C-07 EKC Panel DimensionDocumento1 páginaC-07 EKC Panel DimensionIvan KendrikAinda não há avaliações
- Refrigeration Control DiagramDocumento1 páginaRefrigeration Control DiagramIvan KendrikAinda não há avaliações
- Specification OF Some Industrial EquipmentsDocumento13 páginasSpecification OF Some Industrial EquipmentsIvan KendrikAinda não há avaliações
- CHAPTER 1 IntroductionDocumento5 páginasCHAPTER 1 IntroductionIvan KendrikAinda não há avaliações
- 4.blah Three-Phase FaultDocumento16 páginas4.blah Three-Phase FaultIvan KendrikAinda não há avaliações
- M-15 Service Platform IsometryDocumento1 páginaM-15 Service Platform IsometryIvan KendrikAinda não há avaliações
- Example of A ResumeDocumento2 páginasExample of A ResumeIvan KendrikAinda não há avaliações
- Thesis Proposal - Emdbedded GeneratorDocumento10 páginasThesis Proposal - Emdbedded GeneratorIvan KendrikAinda não há avaliações
- Table of ContentsDocumento4 páginasTable of ContentsIvan KendrikAinda não há avaliações
- DC Motor Calculations - National InstrumentsDocumento22 páginasDC Motor Calculations - National InstrumentsJosé PerezAinda não há avaliações
- DELCO Gen.Documento10 páginasDELCO Gen.HowardgfAinda não há avaliações
- Optimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFDocumento6 páginasOptimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFrakeshee2007Ainda não há avaliações
- DC MotorDocumento3 páginasDC MotorAhmad AzizudinAinda não há avaliações
- D 01Documento209 páginasD 01Raj Boda0% (1)
- Unit 1: The Power System Overview and ModelingDocumento8 páginasUnit 1: The Power System Overview and ModelingIhuhwa Marta TauAinda não há avaliações
- DC Machine (Pharos) PDFDocumento124 páginasDC Machine (Pharos) PDFShailendra Singh KustwarAinda não há avaliações
- Electrical Fundimental Report DC GenratorDocumento7 páginasElectrical Fundimental Report DC GenratorIpi Alifi0% (1)
- Brushless Alternators: © 2000 Graig PearenDocumento3 páginasBrushless Alternators: © 2000 Graig PearenAboalfotoh Mahmoud100% (2)
- Frenos y Embragues BuanlirDocumento24 páginasFrenos y Embragues BuanlirVictor Edwin Rocha VillegasAinda não há avaliações
- Electro Hydraulic System Components and Their OperationDocumento3 páginasElectro Hydraulic System Components and Their OperationAtul NarkhedeAinda não há avaliações
- Monarch Repair ManualDocumento21 páginasMonarch Repair ManualZeck0% (1)
- GATE EE 2006 With SolutionsDocumento56 páginasGATE EE 2006 With Solutionspwnkumar63100% (1)
- ClutchesDocumento288 páginasClutchesDiego Guadalupe Diaz SantiagoAinda não há avaliações
- Armature Reaction. Neutral-Plane Shift. NingDocumento3 páginasArmature Reaction. Neutral-Plane Shift. NingomairAinda não há avaliações
- Speed Control of DC MotorsDocumento2 páginasSpeed Control of DC Motorsmsd183wkAinda não há avaliações
- 3 Point or 4 Point StarterDocumento5 páginas3 Point or 4 Point StarterAmar PandaAinda não há avaliações
- AC Generator Working Principle and PartsDocumento2 páginasAC Generator Working Principle and Partsibnuhary100% (1)
- Nikola Tesla-Colorado Springs Notes-1899-1900Documento431 páginasNikola Tesla-Colorado Springs Notes-1899-1900Anonymous a7S1qyXAinda não há avaliações
- Tutorial Sheet DCDocumento2 páginasTutorial Sheet DCRakesh ThapliyalAinda não há avaliações
- Vector Controller Based Speed Control of Induction Motor Drive With 3-Level SVPWM Based Inverter PDFDocumento11 páginasVector Controller Based Speed Control of Induction Motor Drive With 3-Level SVPWM Based Inverter PDF1balamanianAinda não há avaliações
- ELEC 344 - Module 2 Lecture NotesDocumento45 páginasELEC 344 - Module 2 Lecture NotesMax HornerAinda não há avaliações
- Elect. Lab ManualDocumento39 páginasElect. Lab ManualHarshal NimjeAinda não há avaliações
- Synchronous MotorDocumento33 páginasSynchronous Motorvnyshreyas100% (2)
- DC MachinesDocumento49 páginasDC MachinesAshfaq AbibAinda não há avaliações
- Model Questions Unit2Documento2 páginasModel Questions Unit2RohitonlyforuAinda não há avaliações
- 03 Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsDocumento63 páginas03 Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsRosa Elvira Montalvo MartínezAinda não há avaliações
- Design Study of 2-MW Fully Superconducting Synchronous MotorsDocumento6 páginasDesign Study of 2-MW Fully Superconducting Synchronous MotorsdanielAinda não há avaliações
- Scarab 2Documento12 páginasScarab 2ibneuronaAinda não há avaliações
- Maquinas Electricas - Stephen Chapman - EjerciciosDocumento22 páginasMaquinas Electricas - Stephen Chapman - Ejerciciosjairo100% (1)