Escolar Documentos
Profissional Documentos
Cultura Documentos
Analiza Stadiului Actual Al Sistemelor
Enviado por
Ionut-Catalin DimacheDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Analiza Stadiului Actual Al Sistemelor
Enviado por
Ionut-Catalin DimacheDireitos autorais:
Formatos disponíveis
Ioan Lungu, Clin Micloin
63
ANALIZA STADIULUI ACTUAL AL SISTEMELOR DE MSURARE A DEPLASRILOR
Prof. dr. ing. Ioan Lungu As. ing. Clin Micloin Universitatea Eftimie Murgu Reia, Facultatea de Inginerie P-a Traian Vuia Nr. 1-4, 1700 Reia, Romania e-mail: i.lungu@uem.ro e-mail: c.miclosina@uem.ro Rezumat: Lucrarea prezint stadiul actual al sistemelor de msurare a deplasrilor la mainiunelte cu comand numeric i la roboi industriali, relevnd cele mai noi realizri de traductoare incrementale liniare i rotative, precum i de traductoare pseudo-absolute. Cuvinte cheie: deplasare, msurare, traductor, sistem.
Mainile-unelte cu comand numeric i roboii industriali dispun, la fiecare ax, de sisteme de msurare a deplasrii, care furnizeaz sistemului de comand, semnale electronice. Toate sistemele de msurare a deplasrii se bazeaz pe ncorporarea dimensiunilor liniare, cu o divizare periodic. Perioada de divizare reprezint o caracteristic esenial. Cea mai fin divizare periodic, adic cea mai nalt rezoluie, se poate obine pe baza principiului de msurare optoelectronic. De exemplu, perioadele de divizare ale riglei fotoelectronice HEIDENHEIN [3] sunt de 8 m, 10 m, 20 m, 40 m i 100 m. Riglele inductosyn au perioada de divizare de 2 mm sau de 2,54 mm (0,1 oli). n cazul sistemului de msurare indirect, cu urub-piuli, perioada de divizare corespunde unei rotaii a urubului, fiind egal cu pasul filetului. La sistemele de msurare indirect cu pinion-cremalier, perioada de divizare corespunde deplasrii cremalierei la o rotaie a pinionului. Pentru comanda numeric a mainilor-unelte este necesar, n general, un pas de 1 m sau mai fin. De aceea, perioada de divizare a dimensiunii ncorporate trebuie s fie, n principiu, divizat nc o dat. La unele sisteme de msurare a deplasrii, la palparea dimensiunii ncorporate are loc o interpolare electronic astfel c perioada semnalului este mai mic dect perioada de divizare a dimensiunii ncorporate, ceea ce nseamn c paii de msurare percepui sunt mai fini dect diviziunile riglei. n acest fel, sistemul de comand numeric primete, pentru fiecare pas de msurare(de exemplu 1 m) un impuls direct, de la sistemul de msurare a deplasrii. Sistemele de msurare care utilizeaz rigle fotoelectricesau inductive emit direct un semnal de msurare care reprezint poziia saniei sau deplasarea msurat. Sistemele de msurare bazate pe ncorporri mecanice de dimensiuni, urub-piuli i pinioncremalier, la msurarea deplasrilor liniare necesit un traductor rotativ, care preia unghiul de rotire al urubului sau pinionului i emite semnalul de msurare, astfel c efectueaz o msurare indirect a deplasrii. n unele cazuri, ntre mecanismul urubpiuli sau pinion-cremalier i traductorul rotativ se intercaleaz un angrenaj de msurare. Raportul de transmitere necesar angrenajului este dat de relaia:
i= Mn , T
(1)
n care: M pasul de msurare necesar, de exemplu 0,001 mm; n numrul pailor de msurare pe o rotaie a traductorului, de exemplu 10 000; T perioada de divizare (pasul urubului, respectiv deplasarea n mm la o rotaie a pinionului). n aceste cazuri, erorile de transmitere ale angrenajului se suprapun abaterilor mecanismului urub-piuli sau pinion-cremalier, astfel c precizia de msurare va fi influenat. Msurarea direct a deplasrii constituie soluia cea mai simpl i asigur cea mai mare precizie de msurare, dar este discutabil n unele aplicaii practice sub aspect economic, datorit costului ridicat al traductoarelor liniare. Msurarea numeric este caracterizat prin faptul c mrimea de ieire din traductor reprezint o cifr sau un numr, de regul n cod binar. Msurarea numeric incremental se bazeaz pe principiul divizrii unitii de lungime sau de unghi, ntr-un numr finit de elemente. n timpul deplasrii relative a celor dou pri componente ale traductorului, acesta furnizeaz impulsuri electrice, fiecare impuls reprezentnd o deplasare elementar numit increment de deplasare. Prin nsumarea impulsurilor ntr-un contor electronic se obine
Robotica & Management, 1 / 2002
66
Analiza stadiului actual al sistemelor de msurare a deplasrilor De aceea, se utilizeaz la msurarea deplasrilor de pn la 3 m. Traductoarele incrementale rotative sunt frecvent utilizate, avnd precizie i rezoluie satisfctoare n multe cazuri i datorit preului relativ sczut. Utilizarea lor este rentabil mai ales la msurarea deplasrilor mari, de peste 3 m, cnd mecanismul urub-piuli cu bile care acioneaz sania poate fi folosit i pentru msurarea deplasrii. Traductoarele numeric-absolute liniare se utilizeaz extrem de rar, datorit preului foarte ridicat, a gabaritului mare i a proteciei pretentioase necesare n exploatare. Nu ofer avantaje privind precizia i puterea de rezoluie, fa de traductoarele incrementale liniare. Au ns avantajul msurrii absolute a deplasrii, astfel c la reporniri, dup cderi de tensiune, recunosc imediat poziia saniei fa de punctul zero. n prezent, nici un productor nu ofer traductoare liniare de msurare numeric absolut a deplasrii. Traductoarele numeric absolute rotative au ns un pre mai sczut i se recomand utilizarea lor la msurarea absolut a deplasrilor unghiulare (direct) sau a deplasrilor liniare (indirect), n special atunci cnd se impune indicarea poziiei. Traductoarele pseudo-absolute au fost dezvoltate din traductoarele incrementale, n scopul obinerii avantajelor msurrii absolute. Riglele de msurare cu marcaje de referin codificate n distan asigur toate avantajele traductoarelor incrementale liniare, avnd n plus posibilitatea indicrii poziiei absolute dup o deplasare de numai 20 mm, la repuneri n funcionare dup cderi de tensiune. Traductoarele rotative de tip resolver sunt utilizate mai ales pentru msurarea indirect a deplasrilor liniare. Resolverele sunt traductoare relativ ieftine i comparabile ca performane cu traductoarele incrementale rotative de clas medie. Se utilizeaz n cazurile n care preteniile asupra preciziei nu sunt prea mari. Traductoarele formate din cascade de resolvere se utilizeaz pentru a asigura avantajele msurrii absolute a deplasrii. Costul lor este mult mai ridicat, ceea ce le limiteaz utilizarea din punct de vedere economic. Traductoarele liniare de tip inductosyn sunt relativ mult utilizate datorit avantajelor pe care le prezint, n comparaie cu traductoarele incrementale: mai ieftine, condiii de montaj mai uoare, protecie mai puin pretenioas. Asigur precizii ridicate prin msurarea direct a deplasrii. Inductosynul triplu, care permite msurarea analogic absolut a deplasrii, are o aplicabilitate limitat datorit costului ridicat, care nu este ntotdeauna justificat de avantajul msurrii absolute. Utilizarea lui este recomandat n cazurile n care este strict necesar msurarea direct i absolut a deplasrii.
valoarea deplasrii msurate. Deoarece punctul zero al contorului se poate alege liber, msurarea prin aceast metod poate ncepe din orice punct al cursei saniei, realizndu-se o msurare relativ. Se pot utiliza traductoare liniare cu rigle de impuls, care efectueaz o msurare direct, sau traductoare rotative de impuls, care efectueaz o msurare indirect a deplasrii. Msurarea numeric absolut se bazeaz tot pe principiul divizrii unitii de lungime sau de unghi, dar n mai multe serii de diviziuni, realizate fiecare cu pai diferii. Raportul pailor din rndurile de diviziuni este dat de puteri ntregi ale cifrei 2. Se obine astfel o scal de msurare (rigl) codificat binar, cu n piste. Citirea acestei rigle se face simultan pe toate pistele, astfel c se obine un numr binar care exprim poziia saniei la un moment dat, fa de punctul zero al riglei. Se pot utiliza i discuri codificate binare care, ca traductoare rotative, efectueaz o msurare indirect a deplasrii. Deoarece deplasarea total pe axe necesit de regul mai multe rotaii ale urubului de msurare, traductorul rotativ trebuie s aib mai multe discuri codificate binar, legate cinematic prin angrenaje de precizie. Msurarea analogic a deplasrii se caracterizeaz prin aceea c semnalul de ieire din traductor este, de obicei, o tensiune a crei amplitudine sau faz se modific n mod continuu, odat cu deplasarea msurat. Dependena dintre mrimea sau faza exprimat de o funcie trigonometric, sinus sau cosinus, dac tensiunea are o variaie sinusoidal cu perioada T bine determinat, care constituie o caracteristic constructiv a traductorului, deplasarea este indicat absolut numai n cadrul unei perioade. La deplasri mai mari, un contor electronic suplimentar trebuie s numere perioadele de la originea de msurare. n acest fel, se poate stabili deplasarea total, printr-o msurare analogic ciclic absolut. Msurarea analogic absolut, care s indice n orice moment valoarea deplasrii fa de originea de msurare, necesit utilizarea unor traductoare de tip poteniometru, care furnizeaz un semnal electric continuu, analog i proporional cu deplasarea. Tot n cadrul acestei metode se mai indic utilizarea unor traductoare de tip resolver multiplu sau inductosyn triplu. Dup principiul de funcionare, traductoarele de deplasare pot fi fotoelectrice sau inductive. Din categoria traductoarelor fotoelectrice fac parte traductoarele incrementale, liniare sau rotative i traductoarele codificate absolut, liniare sau rotative. Traductoarele incrementale liniare sunt cele mai frecvent utilizate, n special cele cu rigl din oel, n execuie protejat (capsulat). Cele cu rigl de sticl, avnd precizia de msurare superioar celor cu rigl de oel, se utilizeaz la maini-unelte de precizie nalt. Traductoarele incrementale liniare sunt ns scumpe i au dimensiuni de gabarit mari, n special cele protejate.
Robotica & Management, 1 / 2002
66
Analiza stadiului actual al sistemelor de msurare a deplasrilor
n cele ce urmeaz sunt prezentate, ca principiu i construcie, traductoarele care s-au impus i n prezent sunt utilizate aproape n exclusivitate. Traductoarele incrementale liniare lucreaz pe principiul palprii fotoelectrice a unei reele de diviziuni transparente i opace, de lime egal, executate pe o rigl de sticl special (DIADUR). Rigla este palpat fotoelectric cu ajutorul unei uniti de palpare care se deplaseaz odat cu sania a crei deplasare se msoar. n fig. 1 este redat principiul de msurare fotoelectric cu rigl de sticl, al traductoarelor de tip LS i LID, produse de firma HEIDENHAIN. Perioada de divizare a riglei este de 10 m sau 20 m, valori ce reprezint incrementul de deplasare. Unitatea de palpare cuprinde o surs de lumin, un condensor al razelor de lumin, o plac de palpare prevzut cu o reea de diviziuni egale cu cele ale riglei i patru fotoelemente.
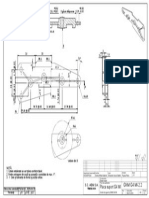
Fig. 2. Interpolarea i digitalizarea semnalelor de palpare fotoelectric a riglei de msurare Rigla traductorului poate fi construit i din oel, caz ntlnit la tipurile LB i LIDA, produse de firma HEIDENHAIN. Rigla de oel (AURODUR) este prevzut cu reeaua diviziunilor de msurare. Dintre acestea, diviziunile pare sunt absorbante de lumin iar cele impare sunt diviziuni reflectante. Unitatea de palpare cuprinde o surs de lumin, un condensor, o plac de palpare i fotoelemente. Pentru msurarea deplasrii sniilor mainilor-unelte cu comand numeric se recomand utilizarea traductoarelor incrementale capsulate, care sunt asigurate mpotriva achiilor i a lichidului de rcire. Traductoarele HEIDENHAIN din seria LS, capsulate, au urmtoarele caracteristici principale: pasul de msurare 1m, perioada de divizare a riglei 20 m, clasa de precizie 5 m, lungimea de msurare 170 3040 mm, viteza maxim de deplasare 60 m/min. n fig. 3 este redat construcia unui traductor capsulat de tipul LS103, din care se pot observa principalele componente, precum i posibilitile de montare pe componentul fix i respectiv pe sania a crei deplasare trebuie s fie msurat.
Fig. 1. Principiul de msurare fotoelectric cu rigl de sticl; 1 surs de lumin; 2 plac de palpare; 3 rigl de sticl; 4 perioada de divizare; 5 condensor; 6 marcaj de referin; 7 fotoelemente. Lumina care trece prin reeaua de diviziuni a plcii de palpare i a riglei este preluat de fotoelemente. La o micare relativ ntre rigl i unitatea de palpare, gradaiile riglei se suprapun alternativ cu gradaiile plcii de palpare. Fotoelementele transform fluxul de lumin, de intensitate variabil periodic, n semnale electrice. Cele dou semnale electrice, notate cu Ie1 i Ie2, sunt defazate cu 90 de grade electrice, aa cum este reprezentat n fig. 2. Acestea sunt prelucrate n continuare de electronica specializat de interpolare i digitalizare, obinndu-se pai de msurare ce reprezint 1/20, 1/40 sau 1/100 din perioada de divizare a riglei i care se nsumeaz ntr-un contor. Pentru reproducerea punctului zero al mainii pe fiecare ax, la reporniri, riglele sunt prevzute cu marcaje de referin. La depirea marcajului de referin de ctre unitatea de palpare se produce un semnal de referin, care este distribuit exact unui pas de msurare.
Fig. 3. Traductor incremental liniar capsulat LS103; 1 marcaj de referin; 2 cuplaj; 3 cursor; 4 reea de divizare; 5 rigl de sticl DIADUR; 6 surs de lumin; 7 conectare cablu; 8 pies de montaj pe sanie; 9 pies intermediar; 10 garnituri de protecie. n cazul traductorului incremental rotativ, rolul riglei este preluat de un disc de sticl special, prevzut cu diviziuni radiale alternative opace i
Robotica & Management, 1 / 2002
66
Analiza stadiului actual al sistemelor de msurare a deplasrilor
transparente. Mrimea unghiular a diviziunilor opace i transparente este egal cu /2 , pasul unghiular sau incrementul unghiular fiind . Conversia deplasrii unghiulare n semnale electrice se face i aici prin palparea fotoelectric a discului. La rotirea discului , fotoelementele emit dou semnale periodice defazate cu 90 de grade electrice. Numrul pailor de msurare pe rotaie depinde de numrul diviziunilor radiale i de tratarea electronic a semnalelor obinute prin palparea fotoelectric. Prin electronica de interpolare i digitalizare, numrul pailor de msurare pe rotaie se obine din numrul diviziunilor multiplicat cu 20 (pentru interpolarea de 5 ori). Pe discul traductorului se mai gsete, pe lng pista cu diviziuni de msurare, i o pist cu marcajul pentru semnalul de referin, care permite reproducerea punctului de referin pe axa a crei deplasare se msoar. n fig. 4 este redat, n seciune longitudinal, construcia unui traductor incremental rotativ tip RON125 produs de firma HEIDENHAIN. Principalele caracteristici ale traductoarelor produse de aceast firm, din seriile RON i ROD, sunt: diametrul exterior 60 90 mm, lungimea 46 64 mm, numrul diviziunilor pe disc 100 5000, turaia maxim admisibil 3000 12 000 rot/min.
care pot fi denumite pseudo-absolute, cum sunt riglele de msurare cu marcajede referin codificate n distan i traductoarele de impuls cu contoare prevzute cu baterie tampon. La riglele cu marcaje de referin codificate n distan, divizarea const dintr-o reea de gradaii incrementale. n paralel cu aceast reea exist o pist cu marcaje de referin obinute printr-o divizare aleatoare care la palparea cu o reea identic produc un singur semnal ngust de referin. Marcajele de referin au distana definit n mod diferit. n acest fel, se poate identifica poziia absolut a fiecrui marcaj de referin. Valoarea poziiei absolute se obine prin deplasarea peste dou marcaje de referin. n fig. 5 este reprezentat o rigl cu marcaje de referin avnd ntre ele distane diferite, n jurul valorii de 10 mm, poziia absolut se obine dup o deplasare de numai 20 mm. Pe acest principiu sunt construite riglele traductoarelor incrementale liniare de tip LS varianta C, produse de firma HEIDENHAIN.
Fig. 5. Rigl de sticl cu marcaje de referin codificate n distan, pentru traductor incremental pseudo-absolut. Traductoarele de impuls cu contoare avnd o baterie-tampon, sunt dezvoltate de firma FANUC. La cderea i oprirea tensiunii, bateria-tampon menine n funciune traductorul de impulsuri i contorul, astfel c valoarea absolut a poziiei pe ax se menine. Dup reconectarea tensiunii, contorul transmite valoarea memorat n sistemul de comand numeric iar prelucrarea ntrerupt poate fi continuat, fr a fi necesar deplasarea la punctul de referin. Fig. 4. Construcia traductorului incremental rotativ tip RON125 HEIDENHAIN; 1 sursa de lumin cu condensor; 2 disc de divizare din sticl DIADUR; 3 fotoelemente; 4 piuli de fixare; 5 rulment; 6 cuplaj; 7 arbore tubular. Avantajele msurrii absolute a deplasrii au determinat dezvoltri ale traductoarelor de msurare
BIBLIOGRAFIE [1] Kief, H.B. NC/CNC Handbuch, Carl Hanser Verlag, Munchen Wien, 2000; [2] Kief, H.B. FFS Handbuch, Carl Hanser Verlag, Munchen Wien, 1998; [3] *** NC Langenmesssysteme, prospecte ale firmei HEIDENHAIN.
Robotica & Management, 1 / 2002
Você também pode gostar
- Tehnologia ConstructiilorDocumento112 páginasTehnologia ConstructiilorOleg Jitari92% (13)
- Metode Bibliografice de CercetareDocumento115 páginasMetode Bibliografice de CercetareLory LaneAinda não há avaliações
- Algebra Liniara, GeometrieDocumento98 páginasAlgebra Liniara, GeometrieYbes MaximAinda não há avaliações
- Proiect DidacticDocumento3 páginasProiect DidacticIonut-Catalin DimacheAinda não há avaliações
- ProiectfiloDocumento9 páginasProiectfiloIonut-Catalin Dimache100% (1)
- PrroiectvennDocumento4 páginasPrroiectvennIonut-Catalin DimacheAinda não há avaliações
- ExercitiuDocumento1 páginaExercitiuIonut-Catalin DimacheAinda não há avaliações
- ProiectfiloDocumento6 páginasProiectfiloIonut-Catalin DimacheAinda não há avaliações
- Proiect LecțieDocumento3 páginasProiect LecțieIonut-Catalin Dimache100% (1)
- ExercitiuDocumento1 páginaExercitiuIonut-Catalin DimacheAinda não há avaliações
- Pro I Ect Ration AmentDocumento4 páginasPro I Ect Ration AmentIonut-Catalin DimacheAinda não há avaliações
- Subiect Lucrare LogicaDocumento1 páginaSubiect Lucrare LogicaIonut-Catalin DimacheAinda não há avaliações
- PrroiectvennDocumento4 páginasPrroiectvennIonut-Catalin DimacheAinda não há avaliações
- Fişă de Lucru FilosofieDocumento1 páginaFişă de Lucru FilosofieIonut-Catalin DimacheAinda não há avaliações
- Proiect FilosofieDocumento5 páginasProiect FilosofieIonut-Catalin DimacheAinda não há avaliações
- Nivel DAE Powercard Standard RON PDFDocumento1 páginaNivel DAE Powercard Standard RON PDFIonut-Catalin DimacheAinda não há avaliações
- Pro I Ect Ration AmentDocumento4 páginasPro I Ect Ration AmentIonut-Catalin DimacheAinda não há avaliações
- ProiectclasifDocumento4 páginasProiectclasifIonut-Catalin DimacheAinda não há avaliações
- Placa Suport G4 MIDocumento1 páginaPlaca Suport G4 MIIonut-Catalin DimacheAinda não há avaliações
- Proiect DidacticinversacontrapusaDocumento2 páginasProiect DidacticinversacontrapusaIonut-Catalin DimacheAinda não há avaliações
- Testare La FilosofieDocumento1 páginaTestare La FilosofieIonut-Catalin DimacheAinda não há avaliações
- TipologiiDocumento5 páginasTipologiiIonut-Catalin DimacheAinda não há avaliações
- 1.debitmetre Si Sisteme de Masurare A GazelorDocumento8 páginas1.debitmetre Si Sisteme de Masurare A GazelorAnonymous iSsmdcAinda não há avaliações
- Pirghie 1A Cu Nervuri Simetrice Cu PoansonareaDocumento1 páginaPirghie 1A Cu Nervuri Simetrice Cu PoansonareaIonut-Catalin DimacheAinda não há avaliações
- Me Niu Casa Elena LupescuDocumento2 páginasMe Niu Casa Elena LupescuIonut-Catalin DimacheAinda não há avaliações
- Catalog 2011Documento187 páginasCatalog 2011Ionut-Catalin DimacheAinda não há avaliações
- Teza Ravai N SandorDocumento192 páginasTeza Ravai N Sandormihai37Ainda não há avaliações
- 1.debitmetre Si Sisteme de Masurare A GazelorDocumento8 páginas1.debitmetre Si Sisteme de Masurare A GazelorAnonymous iSsmdcAinda não há avaliações