Você também pode gostar
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresNo EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresAinda não há avaliações
- CISE 316 Control Systems Design Lab ManualDocumento78 páginasCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- Control Systems NotesDocumento133 páginasControl Systems Noteseee limatAinda não há avaliações
- Control Systems PDFDocumento133 páginasControl Systems PDFShaboddinAinda não há avaliações
- Sliding Mode Control of DC MotorDocumento5 páginasSliding Mode Control of DC MotorPham Quoc ThienAinda não há avaliações
- Coursework Title: Control System Design and Simulation For A Chemical ProcessDocumento6 páginasCoursework Title: Control System Design and Simulation For A Chemical ProcessJianguo WangAinda não há avaliações
- Eee.60-62Documento3 páginasEee.60-62skrtamilAinda não há avaliações
- Experiment # 3 Block Diagrams of Systems Using Simulink ObjectivesDocumento2 páginasExperiment # 3 Block Diagrams of Systems Using Simulink ObjectivesAeshna TanveeraAinda não há avaliações
- Stability Analysis of Nonlinear Systems Using Lyapunov Theory - IDocumento28 páginasStability Analysis of Nonlinear Systems Using Lyapunov Theory - IGurpreet KaurAinda não há avaliações
- Assignment 1 Control System With Electronic, Electrical and Mechanical Transducers and ControllersDocumento10 páginasAssignment 1 Control System With Electronic, Electrical and Mechanical Transducers and ControllersCatcat FishAinda não há avaliações
- Industrial Instrumentation 05EE 62XXDocumento56 páginasIndustrial Instrumentation 05EE 62XXwhiteelephant93Ainda não há avaliações
- Literature Review of PID Controller Based On Various Soft Computing TechniquesDocumento4 páginasLiterature Review of PID Controller Based On Various Soft Computing TechniquesEditor IJRITCCAinda não há avaliações
- EI2352 Process ControlDocumento18 páginasEI2352 Process ControlSanthosh KumarAinda não há avaliações
- Energy ConservationDocumento15 páginasEnergy ConservationManpreet KaurAinda não há avaliações
- UHVE 2.0 Class Notes Part 4 of 4Documento24 páginasUHVE 2.0 Class Notes Part 4 of 4Jayaprabakar JayaramanAinda não há avaliações
- Control System Lecture PlanDocumento3 páginasControl System Lecture PlanGulzar AhamdAinda não há avaliações
- Control Systems 2825: Dr. Mohammad Abdelrahman Semester I 2014/2015Documento54 páginasControl Systems 2825: Dr. Mohammad Abdelrahman Semester I 2014/2015Nur AdlinaAinda não há avaliações
- Chapter1-Basic Concepts of Measurements-09Documento21 páginasChapter1-Basic Concepts of Measurements-09azrurezuan100% (1)
- Control System (PT)Documento7 páginasControl System (PT)MATHANKUMAR.SAinda não há avaliações
- Lecture Notes - MIT - System IdentificationDocumento30 páginasLecture Notes - MIT - System IdentificationsabrahimaAinda não há avaliações
- Modern Control Theory r13Documento1 páginaModern Control Theory r13aleem_201sAinda não há avaliações
- Advanced Control SystemDocumento1 páginaAdvanced Control Systemsaxenamohit_853663Ainda não há avaliações
- Automation and PLC LAB FileDocumento68 páginasAutomation and PLC LAB FileAyush NegiAinda não há avaliações
- Ei 7211-Circuit Simulation Lab List of ExperimentsDocumento61 páginasEi 7211-Circuit Simulation Lab List of ExperimentsKʀɩsʜŋʌ KʌŋʌŋAinda não há avaliações
- UHVE 2.0 Class Notes Part 1 of 4Documento64 páginasUHVE 2.0 Class Notes Part 1 of 4sumiitmishraAinda não há avaliações
- Pid Control: University of GavleDocumento34 páginasPid Control: University of GavlebobAinda não há avaliações
- SS Lecture Notes Mod 1Documento40 páginasSS Lecture Notes Mod 1Konesh KumarAinda não há avaliações
- Elect Machine Total 2012Documento22 páginasElect Machine Total 2012NGOUNEAinda não há avaliações
- Control Systems LectureDocumento217 páginasControl Systems LectureJames Joseph100% (1)
- Boiler Automation Using Programmable Logic ControlDocumento29 páginasBoiler Automation Using Programmable Logic Controlx-robot78% (9)
- Fundamentals of Mechatronics Short CourseDocumento3 páginasFundamentals of Mechatronics Short CourseAamir Hasan KhanAinda não há avaliações
- Signals and SystemsDocumento3 páginasSignals and SystemsArjun Arjun100% (1)
- Open Loop SystemDocumento8 páginasOpen Loop SystemFrances RaphaelAinda não há avaliações
- Automation and Robotics Week 01 Theory Notes 20ME51IDocumento28 páginasAutomation and Robotics Week 01 Theory Notes 20ME51IThanmay JSAinda não há avaliações
- PID Controller: From Wikipedia, The Free EncyclopediaDocumento17 páginasPID Controller: From Wikipedia, The Free EncyclopediatirupataiahxlAinda não há avaliações
- EE2253 NotesDocumento124 páginasEE2253 NotesSiva Kathikeyan100% (1)
- Industrial2 - PIDDocumento66 páginasIndustrial2 - PIDCiubotaru Diana ClaudiaAinda não há avaliações
- Linear Quadratic RegulatorDocumento4 páginasLinear Quadratic RegulatorFlorian PjetriAinda não há avaliações
- Introduction of Control Systems and Basic TerminologyDocumento12 páginasIntroduction of Control Systems and Basic TerminologyShivaji ThubeAinda não há avaliações
- CS 2255 Control Systems Question BankDocumento62 páginasCS 2255 Control Systems Question BankreporterrajiniAinda não há avaliações
- Divergence PDFDocumento7 páginasDivergence PDFkarthekeyanmenonAinda não há avaliações
- NBA Closing The LoopDocumento30 páginasNBA Closing The LoopEr Umesh ThoriyaAinda não há avaliações
- Fuzzy Gain Scheduling of PID Controllers PDFDocumento7 páginasFuzzy Gain Scheduling of PID Controllers PDFMiguel ZeaAinda não há avaliações
- Control Systems Resource SheetDocumento12 páginasControl Systems Resource SheetCharlie Ho SiAinda não há avaliações
- Lecture Plan Signals and SystemsDocumento3 páginasLecture Plan Signals and SystemsMarimuthu KaveriAinda não há avaliações
- Power Electronics Lab ManualDocumento37 páginasPower Electronics Lab ManualDawod Shaaban Al-SulifanieAinda não há avaliações
- KANNUR UNIVERSITY BTech.S7 EE SyllabusDocumento16 páginasKANNUR UNIVERSITY BTech.S7 EE SyllabusManu K MAinda não há avaliações
- CS Lecture Notes Units 1 2 3Documento88 páginasCS Lecture Notes Units 1 2 3sushinkAinda não há avaliações
- Dynamic Analysis of Switching ConvertersDocumento134 páginasDynamic Analysis of Switching ConvertersLisonildoAinda não há avaliações
- Modern Intelligent Instruments - Theory and ApplicationNo EverandModern Intelligent Instruments - Theory and ApplicationAinda não há avaliações
- CPS 808 Introduction To Modeling and SimulationDocumento40 páginasCPS 808 Introduction To Modeling and SimulationSkidz GarciaAinda não há avaliações
- Process Control System A Complete Guide - 2020 EditionNo EverandProcess Control System A Complete Guide - 2020 EditionAinda não há avaliações
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachNo EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachAinda não há avaliações
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceNo EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissAinda não há avaliações
- Process ControlDocumento261 páginasProcess ControlLunokhod Rover50% (2)
- Department of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokDocumento11 páginasDepartment of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokWalid AdnanAinda não há avaliações
- Process Reaction CurveDocumento6 páginasProcess Reaction Curveindra100% (1)
- Experiment No. 3 Closed Loop Proportional - Integral - Derivative Control of Level Objective (S) : Intended Learning Outcomes (Ilos)Documento8 páginasExperiment No. 3 Closed Loop Proportional - Integral - Derivative Control of Level Objective (S) : Intended Learning Outcomes (Ilos)Dexper KingAinda não há avaliações
- Process Dynamics & Control: BSC, Chemical Engineering 8 SemesterDocumento72 páginasProcess Dynamics & Control: BSC, Chemical Engineering 8 SemesterNajeeb Mohammad SubhaniAinda não há avaliações
- 1Documento2 páginas1sudhasesh2000Ainda não há avaliações
- Pass Transistor LogicDocumento36 páginasPass Transistor LogicMuneza NaeemAinda não há avaliações
- Cyele Test Two Important QuestionsDocumento2 páginasCyele Test Two Important Questionssudhasesh2000Ainda não há avaliações
- Business EthicsDocumento12 páginasBusiness Ethicssudhasesh2000Ainda não há avaliações
- DSP Lesson - Plan 5-12-12Documento2 páginasDSP Lesson - Plan 5-12-12sudhasesh2000Ainda não há avaliações
- And GateDocumento8 páginasAnd Gatesudhasesh2000Ainda não há avaliações
- How To Convert TC Full ScreenDocumento1 páginaHow To Convert TC Full Screensudhasesh2000Ainda não há avaliações
- Process Control NotesDocumento11 páginasProcess Control Notessudhasesh2000Ainda não há avaliações
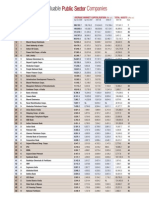
- Indias Most Valuable PSUDocumento2 páginasIndias Most Valuable PSUSuhail AhamedAinda não há avaliações
- MG1351Documento1 páginaMG1351sudhasesh2000Ainda não há avaliações
- HMT Application FormDocumento2 páginasHMT Application FormSourabh ChoukseyAinda não há avaliações
- NABL 142 Policy On Calibration & TreasebilityDocumento5 páginasNABL 142 Policy On Calibration & Treasebilitysudhasesh2000100% (2)
- Ei2311 Biomedical Instrumentation L T P CDocumento1 páginaEi2311 Biomedical Instrumentation L T P Csudhasesh2000Ainda não há avaliações
- Ei2353 Digital System Design L T P CDocumento1 páginaEi2353 Digital System Design L T P Csudhasesh2000Ainda não há avaliações
- Basic Instrumentation Measuring Devices and Basic Pid ControlDocumento125 páginasBasic Instrumentation Measuring Devices and Basic Pid ControlCuong Nguyen ChiAinda não há avaliações
- Ei2311 Biomedical Instrumentation L T P CDocumento1 páginaEi2311 Biomedical Instrumentation L T P Csudhasesh2000Ainda não há avaliações
- VO FinalDocumento140 páginasVO Finalsudhasesh2000Ainda não há avaliações
- Eie Semester 6 Syllabus AnnaDocumento49 páginasEie Semester 6 Syllabus AnnaSiddhanta Sayan GuptaAinda não há avaliações
- NABL 160 Quality Manual GuideDocumento61 páginasNABL 160 Quality Manual Guidesudhasesh200067% (3)
- Thermal Breakthrough Calculations To Optimize Design of Amultiple-Stage EGS 2015-10Documento11 páginasThermal Breakthrough Calculations To Optimize Design of Amultiple-Stage EGS 2015-10orso brunoAinda não há avaliações
- SV Concepts PLK PDFDocumento276 páginasSV Concepts PLK PDFPoojashree LRAinda não há avaliações
- Tutoriales Mastercam V8 6-11Documento128 páginasTutoriales Mastercam V8 6-11Eduardo Felix Ramirez PalaciosAinda não há avaliações
- ATR4518R2Documento2 páginasATR4518R2estebanarca50% (4)
- Water Levels Forecast in Thailand: A Case Study of Chao Phraya RiverDocumento6 páginasWater Levels Forecast in Thailand: A Case Study of Chao Phraya RiverErna UtamiAinda não há avaliações
- Technical Data: Series Allclean AcnpDocumento1 páginaTechnical Data: Series Allclean AcnpBoško IvanovićAinda não há avaliações
- Relay Maintenance and Testing: BenefitsDocumento2 páginasRelay Maintenance and Testing: BenefitsojoladapoAinda não há avaliações
- 1SFC132367M0201 PSE Internal Modbus RTUDocumento22 páginas1SFC132367M0201 PSE Internal Modbus RTUAhmed OsmanAinda não há avaliações
- RTL8139D DataSheetDocumento60 páginasRTL8139D DataSheetRakesh NettemAinda não há avaliações
- Cheng-Yi Cheng - Yi: KBU 10A/15A/25A/35A SERIESDocumento2 páginasCheng-Yi Cheng - Yi: KBU 10A/15A/25A/35A SERIESThomas ThomasAinda não há avaliações
- Nihonto Part IDocumento38 páginasNihonto Part IGergő VidaAinda não há avaliações
- DCM-I&II Lab Equipments ListDocumento2 páginasDCM-I&II Lab Equipments ListPrashant ChinamalliAinda não há avaliações
- Reverse Circulation Cementing: The Complete PictureDocumento104 páginasReverse Circulation Cementing: The Complete PictureJoan Corso100% (1)
- Type 85 Di Box DatasheetDocumento2 páginasType 85 Di Box DatasheetmegadeAinda não há avaliações
- ElutriatorDocumento9 páginasElutriatoratiyorockfan9017Ainda não há avaliações
- 1995 S320 S420 S500 Owner's Manual Edition C PDFDocumento153 páginas1995 S320 S420 S500 Owner's Manual Edition C PDFnpachecorecabarrenAinda não há avaliações
- Three - Dimensional Viscous Confinement and Cooling of Atoms by Resonance Radiation PressureDocumento6 páginasThree - Dimensional Viscous Confinement and Cooling of Atoms by Resonance Radiation PressureWenjun ZhangAinda não há avaliações
- Formula Sheet: Basic Trigonometric IdentitiesDocumento4 páginasFormula Sheet: Basic Trigonometric Identitieschetan temkarAinda não há avaliações
- X-Plane Mobile ManualDocumento66 páginasX-Plane Mobile ManualRafael MunizAinda não há avaliações
- Excel NotesDocumento9 páginasExcel NotesAhnAinda não há avaliações
- Varargout Tugas - GUI (Varargin) : FunctionDocumento7 páginasVarargout Tugas - GUI (Varargin) : FunctionDwi Lestari dwi375ft.2019Ainda não há avaliações
- Science BDocumento2 páginasScience BIyer JuniorAinda não há avaliações
- Alimak Alc - IIDocumento62 páginasAlimak Alc - IImoiburAinda não há avaliações
- Simple Harmonic Oscillator: 1 HamiltonianDocumento10 páginasSimple Harmonic Oscillator: 1 HamiltonianAbdurrahman imamAinda não há avaliações
- Syllabus EMSE6760 DDLDocumento4 páginasSyllabus EMSE6760 DDLlphiekickmydogAinda não há avaliações
- Decision-Making Under Risk and Uncertainty: OutcomesDocumento21 páginasDecision-Making Under Risk and Uncertainty: OutcomesprabodhAinda não há avaliações
- FI Printing Guide Vinyl-303Documento1 páginaFI Printing Guide Vinyl-303tomasykAinda não há avaliações
- North Sails Brochure 2007 enDocumento24 páginasNorth Sails Brochure 2007 ennorthsailsAinda não há avaliações
- Fisher Paykel SmartLoad Dryer DEGX1, DGGX1 Service ManualDocumento70 páginasFisher Paykel SmartLoad Dryer DEGX1, DGGX1 Service Manualjandre61100% (2)
- Synthesis of Glycerol Monooctadecanoate From Octadecanoic Acid and Glycerol. Influence of Solvent On The Catalytic Properties of Basic OxidesDocumento6 páginasSynthesis of Glycerol Monooctadecanoate From Octadecanoic Acid and Glycerol. Influence of Solvent On The Catalytic Properties of Basic OxidesAnonymous yNMZplPbVAinda não há avaliações