Você também pode gostar
- Matlab Short TutorialDocumento45 páginasMatlab Short TutorialCan ÇamlıkAinda não há avaliações
- Tutorial: Fuel Tank SloshingDocumento25 páginasTutorial: Fuel Tank Sloshingyeran__xd100% (1)
- 04 Udf ScalarDocumento20 páginas04 Udf Scalarnovas88100% (1)
- Tecplot 10 User ManualDocumento320 páginasTecplot 10 User ManualDonaldAinda não há avaliações
- Ansys Ls-Dyna Mapdl 14.5 Ws01 Fan Blade ContainmentDocumento5 páginasAnsys Ls-Dyna Mapdl 14.5 Ws01 Fan Blade ContainmentPercy Romero MurilloAinda não há avaliações
- Boundary Conditions Available in ANSYS FluentDocumento3 páginasBoundary Conditions Available in ANSYS FluentAnonymous KVkTrZ7gzd100% (1)
- PVsyst Tutorials PDFDocumento102 páginasPVsyst Tutorials PDFAbdelilah KahajiAinda não há avaliações
- 07 Udf ClarifierDocumento18 páginas07 Udf ClarifierRafael Cosmo100% (1)
- EES Integration Example 3.2-1aDocumento10 páginasEES Integration Example 3.2-1aNayef FtouniAinda não há avaliações
- TUTORIAL 5 - Modeling Radiation and Natural Convection - 12 Juni 2014Documento50 páginasTUTORIAL 5 - Modeling Radiation and Natural Convection - 12 Juni 2014Nadia HandayaniAinda não há avaliações
- UDF MechanicsDocumento47 páginasUDF Mechanicsmaninder singh sekhonAinda não há avaliações
- FLUENT Periodic Boundary Condition SOLVEDDocumento10 páginasFLUENT Periodic Boundary Condition SOLVEDsb aliAinda não há avaliações
- Fluent 13.0 Lecture03 Solver BasicsDocumento15 páginasFluent 13.0 Lecture03 Solver BasicsGhazlani Mohamed AliAinda não há avaliações
- EGA324 17-18 Course Notes and Experimental Requirements V2Documento31 páginasEGA324 17-18 Course Notes and Experimental Requirements V2Mark Dominic KipkorirAinda não há avaliações
- Fluent UDF Tutorial.: An Airfoil in A Free Shear Layer (A Wake, or Due To The Stratification of The Atmosphere)Documento3 páginasFluent UDF Tutorial.: An Airfoil in A Free Shear Layer (A Wake, or Due To The Stratification of The Atmosphere)Saravanan PalanisamyAinda não há avaliações
- Joseph 1990Documento772 páginasJoseph 1990Nandan HegdeAinda não há avaliações
- Modelling flow in fractured media using Darcy-Stokes-Brinkman approachDocumento64 páginasModelling flow in fractured media using Darcy-Stokes-Brinkman approachLucas MarquesAinda não há avaliações
- Conical Solar StillDocumento27 páginasConical Solar StillAbhijeet EkhandeAinda não há avaliações
- ANSYS, Inc. Release Notes PDFDocumento128 páginasANSYS, Inc. Release Notes PDFBrendan ChenAinda não há avaliações
- Finite Element FormulationDocumento38 páginasFinite Element FormulationntrjnAinda não há avaliações
- Create and Customize Your Physical ModelsDocumento30 páginasCreate and Customize Your Physical Modelsraul19rsAinda não há avaliações
- Dissertation - Chen YuanDocumento187 páginasDissertation - Chen YuanArjun ChatterjeeAinda não há avaliações
- How To Access The Heat Flux in General Purpose Fluent Udfs?: Problem/DescriptionDocumento3 páginasHow To Access The Heat Flux in General Purpose Fluent Udfs?: Problem/DescriptionAhmed Hazem100% (1)
- Fluent TutorialDocumento126 páginasFluent Tutorialluis900000Ainda não há avaliações
- TURKEYTRIB'15-http://www Turkeytrib Yildiz Edu TRDocumento2 páginasTURKEYTRIB'15-http://www Turkeytrib Yildiz Edu TRkalelihAinda não há avaliações
- Solar Energy: Renewable Energy and The EnvironmentDocumento9 páginasSolar Energy: Renewable Energy and The EnvironmentNicole Heredia100% (1)
- Lecture PDFDocumento27 páginasLecture PDFtoshugoAinda não há avaliações
- Fluent BcsDocumento28 páginasFluent BcsJoonhongAinda não há avaliações
- J.B. Institute of Engineering and Technology: Course Code: C322 Finite Element MethodDocumento82 páginasJ.B. Institute of Engineering and Technology: Course Code: C322 Finite Element MethodGopinath GangadhariAinda não há avaliações
- CBIR Using Gabor Wavelet Extract Features ImagesDocumento68 páginasCBIR Using Gabor Wavelet Extract Features ImagesSaidhaAinda não há avaliações
- Modeling 2D Fluidized BedDocumento10 páginasModeling 2D Fluidized BedAshwini SwamiAinda não há avaliações
- Carnegie Wave Energy - CETO Wave Energy ProjectDocumento40 páginasCarnegie Wave Energy - CETO Wave Energy ProjectRushmereBaptistAinda não há avaliações
- FLUENT - Tutorial - VOF - Horizontal Film BoilingDocumento16 páginasFLUENT - Tutorial - VOF - Horizontal Film BoilingBrilliand Tegar VerlambangAinda não há avaliações
- How To Get Temperature On A Point (Created With Surface - Point') in A UDFDocumento3 páginasHow To Get Temperature On A Point (Created With Surface - Point') in A UDFAhmed HazemAinda não há avaliações
- Predicting Pressure Distributions Using CFDDocumento177 páginasPredicting Pressure Distributions Using CFDdedysusila100% (5)
- 2019R2 Fluent PDFDocumento7 páginas2019R2 Fluent PDFAlvaro CujiAinda não há avaliações
- Ansys Thermal Tutorial-2Documento14 páginasAnsys Thermal Tutorial-2dd hhAinda não há avaliações
- Integrated System Simulation in MATLAB and SIMULINKDocumento173 páginasIntegrated System Simulation in MATLAB and SIMULINKGoce MojsoskiAinda não há avaliações
- 2 DOF Helicopter Lab ManualDocumento32 páginas2 DOF Helicopter Lab ManualNixon Andres Alvarez BarreraAinda não há avaliações
- Acoustics AACTx R150 L06 AppendixDocumento26 páginasAcoustics AACTx R150 L06 AppendixPercy Romero MurilloAinda não há avaliações
- Hydrology Lecture NotesDocumento125 páginasHydrology Lecture NotesRodelio AbodaAinda não há avaliações
- ANSYS GoodiesDocumento3 páginasANSYS GoodiesrezfamiliesAinda não há avaliações
- ANSYS Coordinate System Guide for Finite Element AnalysisDocumento12 páginasANSYS Coordinate System Guide for Finite Element AnalysisnahoAinda não há avaliações
- Tutorial For Ansys Fluent Porous MediaDocumento30 páginasTutorial For Ansys Fluent Porous MediaLykaios Schultz DohrnAinda não há avaliações
- Udf Wall TempDocumento7 páginasUdf Wall TempAmal ..Ainda não há avaliações
- Udf Tutorial 2017Documento10 páginasUdf Tutorial 2017oussmaAinda não há avaliações
- User Defined Functions in FluentDocumento5 páginasUser Defined Functions in FluentUtkarsh MahulikarAinda não há avaliações
- Simulation of Non-Darcy Flow in Porous Media Including Viscous, Inertial andDocumento7 páginasSimulation of Non-Darcy Flow in Porous Media Including Viscous, Inertial andmohamadi42Ainda não há avaliações
- Transition ModelsDocumento36 páginasTransition ModelsSadullah TaşkınAinda não há avaliações
- Turbulent Flow and Friction Factor in Porous MediaDocumento39 páginasTurbulent Flow and Friction Factor in Porous MediaAminAinda não há avaliações
- Elliptic Problem SolversNo EverandElliptic Problem SolversMartin H. SchultzAinda não há avaliações
- COMSOL MAtlab Livelink PDFDocumento8 páginasCOMSOL MAtlab Livelink PDFneomindxAinda não há avaliações
- 2013 Lab MatlabSimulinkDocumento9 páginas2013 Lab MatlabSimulinkwilldota100% (1)
- VCOType16New Aug06Documento8 páginasVCOType16New Aug06AlenAinda não há avaliações
- LAB ACTIVITY 1 - Introduction To MATLAB PART1Documento19 páginasLAB ACTIVITY 1 - Introduction To MATLAB PART1Zedrik MojicaAinda não há avaliações
- ERT355 - Lab Week 3 - Sem2 - 2018-2019Documento11 páginasERT355 - Lab Week 3 - Sem2 - 2018-2019ShafiraAinda não há avaliações
- 472 Assignment 6Documento5 páginas472 Assignment 6zippedglassesAinda não há avaliações
- LiveLinkforMATLAB 43bDocumento76 páginasLiveLinkforMATLAB 43bpmaco911Ainda não há avaliações
- Design of Perforated PlateDocumento6 páginasDesign of Perforated PlateSepehr Hamzehlouia100% (2)
- 3-Interpretation & The Use of Rate LawDocumento16 páginas3-Interpretation & The Use of Rate LawTom FlynnAinda não há avaliações
- Nietzsche's Thus Spoke ZarathustraDocumento241 páginasNietzsche's Thus Spoke ZarathustraJessica Albin100% (8)
- Membrne Reactor - An Innovation in Waste Water TreatmentDocumento27 páginasMembrne Reactor - An Innovation in Waste Water TreatmentSepehr Hamzehlouia100% (1)
- Ocs LDocumento12 páginasOcs LMartin KnížekAinda não há avaliações
- BullyingDocumento2 páginasBullyingTiara N. A. KhusnudzonaAinda não há avaliações
- Alok OjhaDocumento5 páginasAlok OjhaimaitiAinda não há avaliações
- Cisco 2 Chapter 1Documento31 páginasCisco 2 Chapter 1wendellpoAinda não há avaliações
- FT Flexitest Family - Product - Guide - 1VAC394641-PG - Rev - H - 040221Documento56 páginasFT Flexitest Family - Product - Guide - 1VAC394641-PG - Rev - H - 040221Walter EguizabalAinda não há avaliações
- Hyperion Data Relationship Management DatasheetDocumento5 páginasHyperion Data Relationship Management DatasheetTony KiratsousAinda não há avaliações
- Fagor 800m UserDocumento274 páginasFagor 800m UserMiklós KubinyiAinda não há avaliações
- Lupo Cosimo Scan Books Using Free Software and Digital CameraDocumento18 páginasLupo Cosimo Scan Books Using Free Software and Digital CameraaquarianflowerAinda não há avaliações
- Week 4 - PIG SqoopFall2019Documento117 páginasWeek 4 - PIG SqoopFall2019Oneil HenryAinda não há avaliações
- Dell Latitude 3540 Laptop With 13th Gen Intel® Core™ I7 Processors - Dell USADocumento8 páginasDell Latitude 3540 Laptop With 13th Gen Intel® Core™ I7 Processors - Dell USAjellybeans5rAinda não há avaliações
- Digital Customer Interactions June21Documento5 páginasDigital Customer Interactions June21Ana RezendeAinda não há avaliações
- ECE Senior Project Report GuidelinesDocumento15 páginasECE Senior Project Report GuidelinesAkbar Ali100% (2)
- LF411Documento13 páginasLF411intan nur indahAinda não há avaliações
- Data Flow ArchitectureDocumento3 páginasData Flow Architecturevenmathimsc482Ainda não há avaliações
- AIM-4SL Hardware Manual: Revision Date: 02 AUG 2010Documento51 páginasAIM-4SL Hardware Manual: Revision Date: 02 AUG 2010SholahuddinAinda não há avaliações
- Epf DSC LetterDocumento1 páginaEpf DSC Letteraniket Gujar38% (8)
- SIFANG CSC-326EB V2.03 Transformer Protection IED Manual 2023-01Documento427 páginasSIFANG CSC-326EB V2.03 Transformer Protection IED Manual 2023-01MarkusKunAinda não há avaliações
- MM - TS - 030 - Workflow For NFADocumento18 páginasMM - TS - 030 - Workflow For NFASUBHOJIT BANERJEEAinda não há avaliações
- Algebraic and Symbolic ReasoningDocumento36 páginasAlgebraic and Symbolic ReasoningEnric DescalsotaAinda não há avaliações
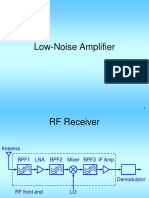
- Low NoiseamplifierDocumento115 páginasLow NoiseamplifierVedran IbrahimovicAinda não há avaliações
- Regulation - 2022: Betck105I-Introduction To Cyber SecurityDocumento19 páginasRegulation - 2022: Betck105I-Introduction To Cyber Securitykiran8453kumarAinda não há avaliações
- Rel-2.0.2.Crtm User GuideDocumento153 páginasRel-2.0.2.Crtm User GuidedsgjtnAinda não há avaliações
- High-Efficient Multilevel Half-Bridge ConverterDocumento9 páginasHigh-Efficient Multilevel Half-Bridge Converter'Mantas PuhtėjavasAinda não há avaliações
- 3 - Hardware SettingsDocumento4 páginas3 - Hardware SettingsLucas MeirelesAinda não há avaliações
- Shopify Dropshipping Powerpoint Slides by Extreme CommerceDocumento214 páginasShopify Dropshipping Powerpoint Slides by Extreme Commerceali ahmerAinda não há avaliações
- Relay Toshiba GR200Documento10 páginasRelay Toshiba GR200luongttluongAinda não há avaliações
- 504 AreaCodeDocumento14 páginas504 AreaCodeBruceAinda não há avaliações
- Manual de Utilizare Modul de Retea Gateway IP Kentec Vizulinx K85000Documento80 páginasManual de Utilizare Modul de Retea Gateway IP Kentec Vizulinx K85000Luiza OcheanaAinda não há avaliações
- Deonte Carraway - Criminal ComplaintDocumento9 páginasDeonte Carraway - Criminal ComplaintFOX 5 NewsAinda não há avaliações