Você também pode gostar
- Final Investigative Report On Lane GravesDocumento12 páginasFinal Investigative Report On Lane GravesMelodi Smith60% (5)
- Automotive Electronics Issue-4Documento21 páginasAutomotive Electronics Issue-4Jhenu100% (14)
- INTERVIEW Q&A - Safety ProfessionalDocumento7 páginasINTERVIEW Q&A - Safety ProfessionalNiel Brian Villarazo100% (4)
- Ghost Brothers of Darkland CountyDocumento47 páginasGhost Brothers of Darkland CountyValentina Radaelli100% (1)
- Connected Car RapportDocumento25 páginasConnected Car RapportavincentitsAinda não há avaliações
- Jsa For Weld and GrindingDocumento6 páginasJsa For Weld and GrindingTanzeel LiaqatAinda não há avaliações
- TCASDocumento39 páginasTCASKamalVirk100% (1)
- Container Handling GuidanceDocumento30 páginasContainer Handling Guidanceshrihari2020Ainda não há avaliações
- Predictive Maintenance Program Implementation ExperienceDocumento120 páginasPredictive Maintenance Program Implementation ExperienceErwin Olav Ecos TovarAinda não há avaliações
- Implementing An In-Vehicle Monitoring System (IVMS) Program: A Guide For The Oil and Gas Extraction IndustryDocumento43 páginasImplementing An In-Vehicle Monitoring System (IVMS) Program: A Guide For The Oil and Gas Extraction IndustryKyla Retzer100% (1)
- White Line Future Editable TextDocumento113 páginasWhite Line Future Editable Textadlard_matthew100% (3)
- Concrete Pressures - Formwork PDFDocumento4 páginasConcrete Pressures - Formwork PDFAleksiey PellicciaAinda não há avaliações
- A.D.A.S. Project ReportDocumento31 páginasA.D.A.S. Project Reportjesal50% (2)
- LA Movie Points For Understanding Answer KeyDocumento4 páginasLA Movie Points For Understanding Answer KeyAndrea PedrazaAinda não há avaliações
- Cooper Bussmann Safety Basics Electrical HazardsDocumento46 páginasCooper Bussmann Safety Basics Electrical HazardsNestor S. ReEyesAinda não há avaliações
- 05 DistressDocumento39 páginas05 DistressMarius100% (1)
- Large Marine Diesel Engines Are Started Using High Pressure Compressed AirDocumento4 páginasLarge Marine Diesel Engines Are Started Using High Pressure Compressed Airaerocristian12345Ainda não há avaliações
- Rephrase (WORD)Documento3 páginasRephrase (WORD)Nicolet3333375% (4)
- Seminar Report On Embedded System in AutomobilesDocumento21 páginasSeminar Report On Embedded System in AutomobilesJobin Philip Varghese71% (7)
- Handfree Driving For Automobile Full Seminar Report 3456Documento6 páginasHandfree Driving For Automobile Full Seminar Report 3456ankitsingh_yadav704Ainda não há avaliações
- Handfree DrivingDocumento7 páginasHandfree DrivingKiran Raj100% (1)
- Handfree DrivingDocumento8 páginasHandfree DrivingPratiek PrustyAinda não há avaliações
- Sae Technical Paper Series: Song You, Mark Krage and Laci JalicsDocumento13 páginasSae Technical Paper Series: Song You, Mark Krage and Laci JalicslelamedaAinda não há avaliações
- Speed Control SystemDocumento3 páginasSpeed Control SystemJerin VargheseAinda não há avaliações
- Feasibility Analysis of Driverless Car Using Vanets: 1.2 Google Driver Less CarDocumento3 páginasFeasibility Analysis of Driverless Car Using Vanets: 1.2 Google Driver Less CarhrishikeshAinda não há avaliações
- Preview - File20220804 31256 5824wtDocumento16 páginasPreview - File20220804 31256 5824wtArunkumar ChandrasekaranAinda não há avaliações
- Development of Autonomous Car-Part II: A Case Study On The Implementation of An Autonomous Driving System Based On Distributed ArchitectureDocumento14 páginasDevelopment of Autonomous Car-Part II: A Case Study On The Implementation of An Autonomous Driving System Based On Distributed ArchitectureAli Ali AlialiAinda não há avaliações
- Design and Implementation of A Fleet Management Sy PDFDocumento8 páginasDesign and Implementation of A Fleet Management Sy PDFrashaAinda não há avaliações
- Drivingstyles: A Smartphone Application To Assess Driver BehaviorDocumento6 páginasDrivingstyles: A Smartphone Application To Assess Driver BehaviorJhiovane AlexsanderAinda não há avaliações
- Siemens SW Developing Advanced Driver Assistant Systems WP - tcm53-81245Documento14 páginasSiemens SW Developing Advanced Driver Assistant Systems WP - tcm53-81245Cupareanu FlorinAinda não há avaliações
- Operating Platoons On Public Motorways: An Introduction To The SARTRE Platooning ProgrammeDocumento11 páginasOperating Platoons On Public Motorways: An Introduction To The SARTRE Platooning ProgrammeDavid HerronAinda não há avaliações
- Automated HIGhway SYStem CPP ProjectDocumento88 páginasAutomated HIGhway SYStem CPP ProjectDurvank ShethAinda não há avaliações
- Design and Implementation of A Fleet Management SyDocumento8 páginasDesign and Implementation of A Fleet Management Sysami teferiAinda não há avaliações
- A Smarter Computer Controlled Model Car: Research Proposal - 2002Documento11 páginasA Smarter Computer Controlled Model Car: Research Proposal - 2002asghar_107Ainda não há avaliações
- Design and Implementation of A Fleet Management SyDocumento8 páginasDesign and Implementation of A Fleet Management SySagar ChouguleAinda não há avaliações
- SynopdocxDocumento28 páginasSynopdocxCyprian KujurAinda não há avaliações
- Research Paper On Adaptive Cruise ControlDocumento4 páginasResearch Paper On Adaptive Cruise Controlmqolulbkf100% (1)
- Automated Emergency Brake Systems: Technical Requirements, Costs and BenefitsDocumento154 páginasAutomated Emergency Brake Systems: Technical Requirements, Costs and BenefitsBrandy WilliamsAinda não há avaliações
- The Traffic Light ControllerDocumento12 páginasThe Traffic Light ControllerBabio GandoAinda não há avaliações
- Android-Based Universal Vehicle Diagnostic and Tracking SystemDocumento8 páginasAndroid-Based Universal Vehicle Diagnostic and Tracking SystemjavoverdugoAinda não há avaliações
- Robovis AccDocumento11 páginasRobovis AccCESIA ISABEL MORENO HERNANDEZAinda não há avaliações
- Vehicle License Plate Recognition System v1.9Documento21 páginasVehicle License Plate Recognition System v1.9Abdullatif AlsuwaidanAinda não há avaliações
- VANET Based Remote Diagnostic Safety System Using Cloud: AbstractDocumento8 páginasVANET Based Remote Diagnostic Safety System Using Cloud: AbstractInternational Journal of Engineering and TechniquesAinda não há avaliações
- An Expert System On Car Diagnosis ForDocumento5 páginasAn Expert System On Car Diagnosis ForMuhammad Baba GoniAinda não há avaliações
- Sensors: System, Design and Experimental Validation of Autonomous Vehicle in An Unconstrained EnvironmentDocumento35 páginasSensors: System, Design and Experimental Validation of Autonomous Vehicle in An Unconstrained EnvironmentJM RamirezAinda não há avaliações
- FMS Dashboard - Descriptive Analytics and Preventive MaintenanceDocumento5 páginasFMS Dashboard - Descriptive Analytics and Preventive MaintenanceMarcelo MiguelAinda não há avaliações
- Vehicle Infrastructure Integration: Unlocking Insights and Advancements through Computer VisionNo EverandVehicle Infrastructure Integration: Unlocking Insights and Advancements through Computer VisionAinda não há avaliações
- Automated Highway ReportDocumento3 páginasAutomated Highway ReportPrathmesh DeshpandeAinda não há avaliações
- Airodiag: A Sophisticated Tool That Diagnoses and Updates Vehicles Software Over AirDocumento8 páginasAirodiag: A Sophisticated Tool That Diagnoses and Updates Vehicles Software Over AirNicki LarsonAinda não há avaliações
- An Empirical Study On The Current and Future Challenges of Automotive Software Release and Configuration ManagementDocumento8 páginasAn Empirical Study On The Current and Future Challenges of Automotive Software Release and Configuration ManagementArunkumar ChandrasekaranAinda não há avaliações
- Video Segmentation and Classification: Abdul Rahim Wasi Hussain Sami GhaffarDocumento7 páginasVideo Segmentation and Classification: Abdul Rahim Wasi Hussain Sami GhaffarAbdul RahimAinda não há avaliações
- NSTSCE - Guidance Document - Effective Use of Onboard Safety Monitoring TechnologiesDocumento81 páginasNSTSCE - Guidance Document - Effective Use of Onboard Safety Monitoring Technologiesashy1985Ainda não há avaliações
- Report On Autopilot Mode of VehiclesDocumento19 páginasReport On Autopilot Mode of Vehiclesvijay nagireddyAinda não há avaliações
- Abstract:: Embedded System in Embedded SystemDocumento7 páginasAbstract:: Embedded System in Embedded SystemYellaturi Siva Kishore ReddyAinda não há avaliações
- Applied Sciences: Autonomous Driving-A Crash Explained in DetailDocumento23 páginasApplied Sciences: Autonomous Driving-A Crash Explained in DetailJayanth BhargavAinda não há avaliações
- VCC Optive Ivss Report Template Optive Report Ppalo DraftDocumento44 páginasVCC Optive Ivss Report Template Optive Report Ppalo DraftTijana BlagojevicAinda não há avaliações
- Renault Nissan New Software Strategy: Olivier Guetta, Emmanuel Coutenceau, Kazuhiro IshigamiDocumento11 páginasRenault Nissan New Software Strategy: Olivier Guetta, Emmanuel Coutenceau, Kazuhiro IshigamiMehdi RostamiAinda não há avaliações
- A Machine Learning Model For Average Fuel Consumption in Heavy VehiclesDocumento20 páginasA Machine Learning Model For Average Fuel Consumption in Heavy Vehiclesram krishnaAinda não há avaliações
- Zie Binsk I 2016Documento12 páginasZie Binsk I 2016Yojith KRAinda não há avaliações
- SyDocumento15 páginasSyisukuruAinda não há avaliações
- Anti Crash Vehicle Security SystemDocumento27 páginasAnti Crash Vehicle Security SystemAnil TandonAinda não há avaliações
- SDV WP Final 27062022Documento22 páginasSDV WP Final 27062022abu siddiqiAinda não há avaliações
- Report EV InfraDocumento11 páginasReport EV InfraSanthoshAinda não há avaliações
- Spee Tom TerDocumento16 páginasSpee Tom TerpradeepAinda não há avaliações
- Development of A GPS Navigation System For VehiclesDocumento36 páginasDevelopment of A GPS Navigation System For VehiclesSalmanSalluAinda não há avaliações
- n16 AshleyDocumento6 páginasn16 Ashleysheldon_chuangAinda não há avaliações
- Presented by M.Shino Prathibha Iii-It V.Priyanga Iii-ItDocumento17 páginasPresented by M.Shino Prathibha Iii-It V.Priyanga Iii-ItkalanchiyaraniAinda não há avaliações
- Location Based Vehicle ServiceDocumento21 páginasLocation Based Vehicle Servicegattus123Ainda não há avaliações
- IE 5111 Systems Engineering Group ReportDocumento67 páginasIE 5111 Systems Engineering Group ReportRobert TaylorAinda não há avaliações
- Cs Ford en tcm73-117664Documento4 páginasCs Ford en tcm73-117664amira alyAinda não há avaliações
- IEEE BigData 2023 MM TrafficRiskDocumento10 páginasIEEE BigData 2023 MM TrafficRiskcloudserviceuitAinda não há avaliações
- Aguila JImenez Mario ProjectoDocumento18 páginasAguila JImenez Mario ProjectoMARIO ANTONIO AGUILA JIMENEZAinda não há avaliações
- Connected and Automated Vehicles: Developing Policies, Designing Programs, and Deploying Projects: From Policy to PracticeNo EverandConnected and Automated Vehicles: Developing Policies, Designing Programs, and Deploying Projects: From Policy to PracticeAinda não há avaliações
- San Juanico PDFDocumento16 páginasSan Juanico PDFZaid ImranAinda não há avaliações
- Gerard DepardieuDocumento14 páginasGerard DepardieuGanea FlorentinaAinda não há avaliações
- SSP 281 New Beetle CabrioletDocumento40 páginasSSP 281 New Beetle Cabrioletภูเก็ต เป็นเกาะAinda não há avaliações
- Please God I'M Only 17 By: Dr. Michael Lee PolingDocumento1 páginaPlease God I'M Only 17 By: Dr. Michael Lee PolingHarlene Marikit AsendidoAinda não há avaliações
- Autonomous Emergency Braking Test Results: Wesley Hulshof Iain Knight Alix Edwards Matthew Avery Colin GroverDocumento13 páginasAutonomous Emergency Braking Test Results: Wesley Hulshof Iain Knight Alix Edwards Matthew Avery Colin GroverVaibhav AroraAinda não há avaliações
- Basikal LajakDocumento4 páginasBasikal LajakDympna Constance DewisAinda não há avaliações
- Kin ENGDocumento25 páginasKin ENGLakshyaAinda não há avaliações
- FavisGCD Case Digest With ReflectionDocumento4 páginasFavisGCD Case Digest With ReflectionIan Carl AmbrosioAinda não há avaliações
- Joy Academy English Test - 01 (Class - 08, ODM)Documento2 páginasJoy Academy English Test - 01 (Class - 08, ODM)Edusaint ContentAinda não há avaliações
- Air Transportation LawDocumento31 páginasAir Transportation LawadamAinda não há avaliações
- UMARDocumento1 páginaUMARFarkh SairAinda não há avaliações
- P0F6D4D4Documento19 páginasP0F6D4D4ChrisRobinsonAinda não há avaliações
- Gas Laws and Ideal Gases 1Documento34 páginasGas Laws and Ideal Gases 1brianbobbiAinda não há avaliações
- Tcas SystemDocumento30 páginasTcas Systemaidil kashul100% (1)
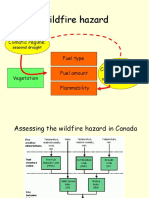
- Wildfire Hazard: Climatic Regime: Fuel Type Fuel Amount Flammability VegetationDocumento65 páginasWildfire Hazard: Climatic Regime: Fuel Type Fuel Amount Flammability VegetationIvan Barać100% (1)
- Coefficient of RestitutionDocumento13 páginasCoefficient of RestitutionDivina Mercedes FernandoAinda não há avaliações
- 21 Safety Rules For Working With Electrical EquipmentDocumento5 páginas21 Safety Rules For Working With Electrical Equipmentjob_pAinda não há avaliações