Você também pode gostar
- Chapter 2 ProblemsDocumento6 páginasChapter 2 ProblemsYour MaterialsAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- RSA - Brand - Guidelines - 2019 2Documento79 páginasRSA - Brand - Guidelines - 2019 2Gigi's DelightAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- 5c3f1a8b262ec7a Ek PDFDocumento5 páginas5c3f1a8b262ec7a Ek PDFIsmet HizyoluAinda não há avaliações
- Manual s10 PDFDocumento402 páginasManual s10 PDFLibros18Ainda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Ricoh IM C2000 IM C2500: Full Colour Multi Function PrinterDocumento4 páginasRicoh IM C2000 IM C2500: Full Colour Multi Function PrinterKothapalli ChiranjeeviAinda não há avaliações
- Sba 2Documento29 páginasSba 2api-377332228Ainda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Environmental Economics Pollution Control: Mrinal Kanti DuttaDocumento253 páginasEnvironmental Economics Pollution Control: Mrinal Kanti DuttashubhamAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Week 7Documento24 páginasWeek 7Priyank PatelAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Review1 ScheduleDocumento3 páginasReview1 Schedulejayasuryam.ae18Ainda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Anatomy Anal CanalDocumento14 páginasAnatomy Anal CanalBela Ronaldoe100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Talking Art As The Spirit Moves UsDocumento7 páginasTalking Art As The Spirit Moves UsUCLA_SPARCAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Leak Detection ReportDocumento29 páginasLeak Detection ReportAnnMarie KathleenAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Work ProblemsDocumento19 páginasWork ProblemsOfelia DavidAinda não há avaliações
- Equivalent Fractions Activity PlanDocumento6 páginasEquivalent Fractions Activity Planapi-439333272Ainda não há avaliações
- (123doc) - Toefl-Reading-Comprehension-Test-41Documento8 páginas(123doc) - Toefl-Reading-Comprehension-Test-41Steve XAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- ReadmeDocumento3 páginasReadmedhgdhdjhsAinda não há avaliações
- 2SB817 - 2SD1047 PDFDocumento4 páginas2SB817 - 2SD1047 PDFisaiasvaAinda não há avaliações
- Article An Incident and Injury Free Culture Changing The Face of Project Operations Terra117 2Documento6 páginasArticle An Incident and Injury Free Culture Changing The Face of Project Operations Terra117 2nguyenthanhtuan_ecoAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Online Extra: "Economists Suffer From Physics Envy"Documento2 páginasOnline Extra: "Economists Suffer From Physics Envy"Bisto MasiloAinda não há avaliações
- 70 Valves SolenoidDocumento105 páginas70 Valves SolenoidrizalAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Presentation 11Documento14 páginasPresentation 11stellabrown535Ainda não há avaliações
- What Is TranslationDocumento3 páginasWhat Is TranslationSanskriti MehtaAinda não há avaliações
- Mark Garside Resume May 2014Documento3 páginasMark Garside Resume May 2014api-199955558Ainda não há avaliações
- CT SizingDocumento62 páginasCT SizingMohamed TalebAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Chapter 8 Data Collection InstrumentsDocumento19 páginasChapter 8 Data Collection InstrumentssharmabastolaAinda não há avaliações
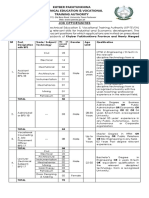
- KP Tevta Advertisement 16-09-2019Documento4 páginasKP Tevta Advertisement 16-09-2019Ishaq AminAinda não há avaliações
- 3 ALCE Insulators 12R03.1Documento12 páginas3 ALCE Insulators 12R03.1Amílcar Duarte100% (1)
- 2009 2011 DS Manual - Club Car (001-061)Documento61 páginas2009 2011 DS Manual - Club Car (001-061)misaAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Harper Independent Distributor Tri FoldDocumento2 páginasHarper Independent Distributor Tri FoldYipper ShnipperAinda não há avaliações
- Chapter3 Elasticity and ForecastingDocumento25 páginasChapter3 Elasticity and ForecastingGee JoeAinda não há avaliações