Você também pode gostar
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 4.failure Theories and Stress ConcentrationsDocumento21 páginas4.failure Theories and Stress ConcentrationsAmr El SaeedAinda não há avaliações
- Template SOA (ISMS)Documento51 páginasTemplate SOA (ISMS)sitiruzaimahAinda não há avaliações
- The History of PumpsDocumento8 páginasThe History of Pumpsdhanu_aquaAinda não há avaliações
- OSHA Standard For Fixed Ladders SummaryDocumento12 páginasOSHA Standard For Fixed Ladders SummarysesabcdAinda não há avaliações
- RPVP Puerto PrincesaDocumento8 páginasRPVP Puerto PrincesaRanny LomibaoAinda não há avaliações
- CSL Testing MethodDocumento4 páginasCSL Testing MethodGaneshalingam RamprasannaAinda não há avaliações
- WTS 12 ElectrodynamicsDocumento28 páginasWTS 12 ElectrodynamicsTondani100% (1)
- UPV Test ReportDocumento22 páginasUPV Test Reportteeyuan100% (4)
- Site CharacterizationDocumento15 páginasSite CharacterizationMáximo A. SánchezAinda não há avaliações
- Ultrasonic Pulse VelocityDocumento16 páginasUltrasonic Pulse VelocityShivamBose100% (1)
- Case Study-R12 12Documento81 páginasCase Study-R12 12ranjitpandeyAinda não há avaliações
- Infiltration Ventilation LeakageDocumento42 páginasInfiltration Ventilation LeakageBulut YildizAinda não há avaliações
- Radio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericNo EverandRadio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericAinda não há avaliações
- Grouting in Rock TunnellingDocumento161 páginasGrouting in Rock TunnellingOanaAinda não há avaliações
- Lab Report!!!Documento10 páginasLab Report!!!Dharshanaa Babu0% (1)
- LatihanDocumento18 páginasLatihanAhmad DulfiAinda não há avaliações
- NDT Methods for Concrete StructuresDocumento4 páginasNDT Methods for Concrete StructuresNurAtikahAinda não há avaliações
- Ultrasonic Pulse VelocityDocumento3 páginasUltrasonic Pulse VelocityanpyaaAinda não há avaliações
- SIBIE Procedure Improves Impact-Echo Data InterpretationDocumento89 páginasSIBIE Procedure Improves Impact-Echo Data Interpretationmusiomi2005Ainda não há avaliações
- KunduDocumento10 páginasKunduAshwary Sheel Wali Research Scholar, Dept of Mech Engg., IIT (BHU)Ainda não há avaliações
- Impact Echo Scanning For Discontinuity Detection and Imaging in Posttensioned Concrete Bridges and Other StructuresDocumento6 páginasImpact Echo Scanning For Discontinuity Detection and Imaging in Posttensioned Concrete Bridges and Other StructuresPDDELUCAAinda não há avaliações
- A Comparison Between Direct and Indirect Method of Ultrasonic Pulse Velocity in Detecting Concrete DefectsDocumento5 páginasA Comparison Between Direct and Indirect Method of Ultrasonic Pulse Velocity in Detecting Concrete DefectsSri KalyanAinda não há avaliações
- Heat ExchangerDocumento11 páginasHeat ExchangerTita Tokcher SnheuenAinda não há avaliações
- NDE Innovations by Larry OlsonDocumento21 páginasNDE Innovations by Larry OlsonSanjeew K. SinghAinda não há avaliações
- NDTDocumento6 páginasNDTrvrbloreAinda não há avaliações
- Numerical Time-Domain Simulation of Diffusive Ultrasound in ConcreteDocumento6 páginasNumerical Time-Domain Simulation of Diffusive Ultrasound in ConcreteDuílio Ferronatto LeiteAinda não há avaliações
- Nondestructive Measurement Techniques and Analysis ToolsDocumento10 páginasNondestructive Measurement Techniques and Analysis ToolsHaidiMustaqimAinda não há avaliações
- How To Read MSS Report and Report ExamplesDocumento18 páginasHow To Read MSS Report and Report ExamplesEDER TORRADOAinda não há avaliações
- Crack depth measurement with UPVDocumento13 páginasCrack depth measurement with UPVMohd NasimAinda não há avaliações
- Numerical Study On Reducing The Ground Borne Vibrations Using Open Trench and Rubber-Chips Filled Trench Wave BarriersDocumento4 páginasNumerical Study On Reducing The Ground Borne Vibrations Using Open Trench and Rubber-Chips Filled Trench Wave Barriersonur.toygarAinda não há avaliações
- Application of Taguchi Method For Parametric Studies of A Funnel Shaped Structure Used For Noise Reflection With Source On The CenterDocumento13 páginasApplication of Taguchi Method For Parametric Studies of A Funnel Shaped Structure Used For Noise Reflection With Source On The CenterAnonymous pKuPK3zUAinda não há avaliações
- NDT of NPP Concrete Structures ReportDocumento51 páginasNDT of NPP Concrete Structures Reportmusiomi2005Ainda não há avaliações
- Ut Testing of Concrete StructuresDocumento6 páginasUt Testing of Concrete StructuresPDDELUCAAinda não há avaliações
- Norwegian Technical 25Documento24 páginasNorwegian Technical 25Jose AlvarezAinda não há avaliações
- Machine vision for surface roughness classification of castingsDocumento36 páginasMachine vision for surface roughness classification of castingskalebasveggieAinda não há avaliações
- Scale Modelling of Railway Noise Barriers: Journal of Sound and Ibration (2000) 234 (2), 207) 223Documento17 páginasScale Modelling of Railway Noise Barriers: Journal of Sound and Ibration (2000) 234 (2), 207) 223Evi AnistaAinda não há avaliações
- Investigating The Effect of Using Softer Rail-Pads On Ground-Borne Vibration From Underground RailwaysDocumento25 páginasInvestigating The Effect of Using Softer Rail-Pads On Ground-Borne Vibration From Underground RailwaysC.majiid CumarAinda não há avaliações
- NDT MethodsDocumento4 páginasNDT MethodsKamal ArabAinda não há avaliações
- The Consistent Performance in Dispersion Analysis For Geotechnical Surface Wave InvestigationsDocumento8 páginasThe Consistent Performance in Dispersion Analysis For Geotechnical Surface Wave InvestigationsMahardhika19 RizkyAinda não há avaliações
- NDT&E International: A. Dem Enko, H.A. Visser, R. AkkermanDocumento10 páginasNDT&E International: A. Dem Enko, H.A. Visser, R. AkkermanMohd NasimAinda não há avaliações
- NDT and E International: Stewart G. Haslinger, Michael.J.S. Lowe, Zhengjun Wang, Fan ShiDocumento14 páginasNDT and E International: Stewart G. Haslinger, Michael.J.S. Lowe, Zhengjun Wang, Fan ShiChonkarn ChieblamAinda não há avaliações
- Use ultrasound to estimate depth of concrete cracksDocumento11 páginasUse ultrasound to estimate depth of concrete crackspoyanAinda não há avaliações
- Characterization of Delamination-Type Damages in Composite Laminates Using Guided Wave Visualization and Air-Coupled UltrasoundDocumento11 páginasCharacterization of Delamination-Type Damages in Composite Laminates Using Guided Wave Visualization and Air-Coupled UltrasoundCESARAinda não há avaliações
- Design of Ground Penetrating Radar Antenna For Detecting Soil Contamination at L-Band FrequenciesDocumento14 páginasDesign of Ground Penetrating Radar Antenna For Detecting Soil Contamination at L-Band FrequenciesJayesh SharmaAinda não há avaliações
- NDT&E International: C. Ramadas, Janardhan Padiyar, Krishnan Balasubramaniam, Makarand Joshi, C.V. KrishnamurthyDocumento8 páginasNDT&E International: C. Ramadas, Janardhan Padiyar, Krishnan Balasubramaniam, Makarand Joshi, C.V. KrishnamurthybobcrystoAinda não há avaliações
- Reveiw Pavt AnalysisDocumento11 páginasReveiw Pavt AnalysisSeid AbduAinda não há avaliações
- Using trenches to reduce tunnelling vibrationsDocumento7 páginasUsing trenches to reduce tunnelling vibrationsMauricio Jara OrtizAinda não há avaliações
- NDT PaperDocumento11 páginasNDT PaperFrank JohnAinda não há avaliações
- Testing of Buried Pipelines Using Guided Waves: A. Demma, D. Alleyne, B. PavlakovicDocumento7 páginasTesting of Buried Pipelines Using Guided Waves: A. Demma, D. Alleyne, B. PavlakovicNordin SuhadatAinda não há avaliações
- J24 PDFDocumento14 páginasJ24 PDFShillin KsAinda não há avaliações
- V Meter ManualDocumento65 páginasV Meter Manualabada3Ainda não há avaliações
- Acoustic Characteristics of Noise Absorbing Barriers: Gleb Nazarov, Dmitry Nepryakhin, and Alexandr KomkinDocumento9 páginasAcoustic Characteristics of Noise Absorbing Barriers: Gleb Nazarov, Dmitry Nepryakhin, and Alexandr KomkinAtharv MarneAinda não há avaliações
- WAZNE 1-Schemat PracyDocumento14 páginasWAZNE 1-Schemat PracyDarek2Ainda não há avaliações
- EMAT Ultrasonic Guided Wave Inspection of Simple Pipe SupportsDocumento4 páginasEMAT Ultrasonic Guided Wave Inspection of Simple Pipe SupportsVuong Tran VanAinda não há avaliações
- Interpretation of Signals From An Acoustic Cone PenetrometerDocumento6 páginasInterpretation of Signals From An Acoustic Cone PenetrometerLTE002Ainda não há avaliações
- A Novel Method For Ultrasonic Evaluation of HorizoDocumento10 páginasA Novel Method For Ultrasonic Evaluation of Horizohernando gelvesAinda não há avaliações
- Materials and Design: A.A. Shah, Y. RibakovDocumento8 páginasMaterials and Design: A.A. Shah, Y. RibakovElango PaulchamyAinda não há avaliações
- A Wind Tunnel Study On Concentration Variation For Single Storied Staggered Array Configuration With Downwind DistanceDocumento7 páginasA Wind Tunnel Study On Concentration Variation For Single Storied Staggered Array Configuration With Downwind DistanceIOSRjournalAinda não há avaliações
- Ultrasonic Pulse Velocity Test Is13311Documento2 páginasUltrasonic Pulse Velocity Test Is13311Rajesh KumarAinda não há avaliações
- Voids Detection in Brick Masonry Structures by Using Ultrasonic TestingDocumento4 páginasVoids Detection in Brick Masonry Structures by Using Ultrasonic TestingkarunaAinda não há avaliações
- KMM 1987Documento34 páginasKMM 1987ssssbossssAinda não há avaliações
- Ap 7 (01792)Documento3 páginasAp 7 (01792)lilitpcAinda não há avaliações
- Study of Commonly Encountered Defects in FRP Composites Through Air-Coupled Ultrasonic C-Scanning With Different Frequencies and WaveformsDocumento7 páginasStudy of Commonly Encountered Defects in FRP Composites Through Air-Coupled Ultrasonic C-Scanning With Different Frequencies and WaveformsChirag AnandAinda não há avaliações
- Paprier Ant Setmoflabdmines Tent: Extsive ExperimDocumento6 páginasPaprier Ant Setmoflabdmines Tent: Extsive ExperimhidaiAinda não há avaliações
- Determination of Attenuation and Geometric Damping On Clayey Sand Residual Soil in Irregular Profile Using Surface Wave MethodDocumento13 páginasDetermination of Attenuation and Geometric Damping On Clayey Sand Residual Soil in Irregular Profile Using Surface Wave Methodanon_191493546Ainda não há avaliações
- Accuracy of Pavement Thicknesses Estimation Using Different Ground Penetrating Radar Analysis ApproachesDocumento11 páginasAccuracy of Pavement Thicknesses Estimation Using Different Ground Penetrating Radar Analysis ApproachesShaik Anwar HussainAinda não há avaliações
- Development of Assessment Technique For Tunnel Concrete Lining Using Wavelet TransformDocumento5 páginasDevelopment of Assessment Technique For Tunnel Concrete Lining Using Wavelet TransformHarold TaylorAinda não há avaliações
- Noise in Nanoscale Semiconductor DevicesNo EverandNoise in Nanoscale Semiconductor DevicesTibor GrasserAinda não há avaliações
- Concrete Pavement Thickness Variation Assessment With Cores and Non - Destructive Testing Measurements Mary Vancura (Corresponding) Randal BarnesDocumento13 páginasConcrete Pavement Thickness Variation Assessment With Cores and Non - Destructive Testing Measurements Mary Vancura (Corresponding) Randal Barnesapi-22997377Ainda não há avaliações
- Ultrasonic Tomography Testing Capabilities and Research at The University of MinnesotaDocumento35 páginasUltrasonic Tomography Testing Capabilities and Research at The University of Minnesotaapi-22997377Ainda não há avaliações
- Dut Workshop - Horizontal Cracking Paper Abeeldens Etal FinalDocumento13 páginasDut Workshop - Horizontal Cracking Paper Abeeldens Etal Finalapi-22997377Ainda não há avaliações
- 2013 Detection of Subsurface Joint DeteriorationDocumento10 páginas2013 Detection of Subsurface Joint Deteriorationapi-22997377Ainda não há avaliações
- Ultrasonic Tomography Naptf Faa ReportDocumento34 páginasUltrasonic Tomography Naptf Faa Reportapi-22997377Ainda não há avaliações
- Ultrasonic Techniques M2LW-13OR0403035 PDFDocumento130 páginasUltrasonic Techniques M2LW-13OR0403035 PDFpondyseenuAinda não há avaliações
- 2011 General ApplicationsDocumento10 páginas2011 General Applicationsapi-22997377Ainda não há avaliações
- 14 5174Documento17 páginas14 5174api-22997377Ainda não há avaliações
- Georgia I-85 Pe ReportDocumento16 páginasGeorgia I-85 Pe Reportapi-22997377Ainda não há avaliações
- Linked Forensics Mira Compressed1Documento48 páginasLinked Forensics Mira Compressed1api-22997377Ainda não há avaliações
- 2012 Joint DiagnosticsDocumento8 páginas2012 Joint Diagnosticsapi-22997377Ainda não há avaliações
- Magnetic Tomography Mit ScanDocumento8 páginasMagnetic Tomography Mit Scanapi-22997377Ainda não há avaliações
- Hoegh Khazanovich Astm2012Documento10 páginasHoegh Khazanovich Astm2012api-22997377Ainda não há avaliações
- Clay Ball Reconstructions and AnnotationsDocumento18 páginasClay Ball Reconstructions and Annotationsapi-22997377Ainda não há avaliações
- Coolac Bypass Mira Joints Cracks ReportDocumento17 páginasCoolac Bypass Mira Joints Cracks Reportapi-22997377Ainda não há avaliações
- Ultrasonic Tomography Naptf Faa ReportDocumento34 páginasUltrasonic Tomography Naptf Faa Reportapi-22997377Ainda não há avaliações
- Mktech Is1-19Hd & Receptor: Receptor PVR de Satelit Si Semnal Terestru Raport de TestareDocumento7 páginasMktech Is1-19Hd & Receptor: Receptor PVR de Satelit Si Semnal Terestru Raport de TestareAlexander WieseAinda não há avaliações
- You Yangs RP Visitor GuideDocumento2 páginasYou Yangs RP Visitor GuideSomaAinda não há avaliações
- Software TestingDocumento3 páginasSoftware TestingDr. P. N. Renjith Associate Professor - CSEAinda não há avaliações
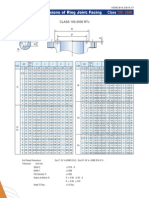
- RTJ Dimension ASME B16.5/B16.47Documento1 páginaRTJ Dimension ASME B16.5/B16.47parayilomer0% (1)
- Reliance Jio Industry AnalysisDocumento45 páginasReliance Jio Industry AnalysisBhavya BhartiAinda não há avaliações
- Sheds Direct Ireland's Wooden BrochureDocumento12 páginasSheds Direct Ireland's Wooden BrochureVictor Celestino Montañez CarranzaAinda não há avaliações
- Online Quiz System DocumentationDocumento92 páginasOnline Quiz System DocumentationSultan Aiman100% (1)
- Mechanical Power Transmission ReviewDocumento17 páginasMechanical Power Transmission ReviewRoshan TiwariAinda não há avaliações
- GM300 SMDocumento46 páginasGM300 SMSrboljub Milosavljevic100% (1)
- GDCF 2 240 - 2nd - 01 10Documento2 páginasGDCF 2 240 - 2nd - 01 10edgardomichligAinda não há avaliações
- Transmission ErrorDocumento7 páginasTransmission ErrorTapas JenaAinda não há avaliações
- FM Global Property Loss Prevention Data Sheets: List of FiguresDocumento12 páginasFM Global Property Loss Prevention Data Sheets: List of Figuresdaniela hritucAinda não há avaliações
- TSB 1106 - MFY Starter Solenoid - ChangeDocumento1 páginaTSB 1106 - MFY Starter Solenoid - ChangeChrisMAinda não há avaliações
- GEC - Sample Resume For StudentsDocumento2 páginasGEC - Sample Resume For StudentsNiketAinda não há avaliações
- JV Punj Lloyd - SICIMDocumento9 páginasJV Punj Lloyd - SICIMBarock NaturelAinda não há avaliações
- Nitobond EP 0608Documento2 páginasNitobond EP 0608James PittsAinda não há avaliações
- Core 3Documento2 páginasCore 3RidhiAinda não há avaliações
- Zw3d2022 Lite Vs Cadbro 2022Documento4 páginasZw3d2022 Lite Vs Cadbro 2022Carlos LimaAinda não há avaliações
- Bluskies Engineering PVT LTD: Acp Panel Inpection ReportDocumento7 páginasBluskies Engineering PVT LTD: Acp Panel Inpection ReportRavi Shankar KolluruAinda não há avaliações
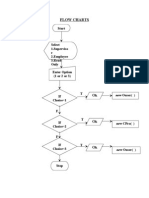
- Flow Charts Option: StartDocumento13 páginasFlow Charts Option: StartbalabooksAinda não há avaliações
- Control Valve and Steam Line PDFDocumento19 páginasControl Valve and Steam Line PDFRofi MuhammadAinda não há avaliações