Você também pode gostar
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysAinda não há avaliações
- Devoir Engrenages eDocumento8 páginasDevoir Engrenages esb ali100% (1)
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsNo EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsAinda não há avaliações
- Chap08 MAS PDFDocumento4 páginasChap08 MAS PDFCheikh Brahim Elkhadar100% (1)
- TD 2 EngrenagesDocumento4 páginasTD 2 EngrenagesPFEAinda não há avaliações
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesAinda não há avaliações
- 3 DS2 - DT 2020 - 2021Documento5 páginas3 DS2 - DT 2020 - 2021Elafif Hamdi100% (1)
- Cons Meca s3 1er GR 2017Documento7 páginasCons Meca s3 1er GR 2017Simo Stit100% (1)
- 10 Accouplements TemporairesDocumento20 páginas10 Accouplements Temporaireszouhour brahmi100% (1)
- Transmission de Puissance - GeneralitesDocumento10 páginasTransmission de Puissance - Generalitesntayoub75% (4)
- Travaux DirigesDocumento32 páginasTravaux Dirigestarik outalAinda não há avaliações
- Embrayages Frein 10 11 12Documento7 páginasEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Contrôle de Mécanique Embrayage Frein Limiteur de CoupleDocumento6 páginasContrôle de Mécanique Embrayage Frein Limiteur de CoupleMeryemHmouriAinda não há avaliações
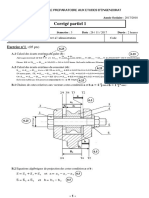
- Corrigé Partiel 1-2018Documento4 páginasCorrigé Partiel 1-2018Ramdane BoulahiaAinda não há avaliações
- Cours Engrenages PDFDocumento5 páginasCours Engrenages PDFHanane Tounsi100% (2)
- Transmission de Puissamce PDFDocumento82 páginasTransmission de Puissamce PDFkhocine75% (4)
- Transformation Des Mvts 10-11Documento4 páginasTransformation Des Mvts 10-11MIMFS100% (2)
- Bride Hydraulique CorrigeDocumento4 páginasBride Hydraulique CorrigeSalah Dark80% (5)
- 2 Acouplements PermenantsDocumento10 páginas2 Acouplements Permenantsmejri merin0% (1)
- 32-Roue de FrictionDocumento4 páginas32-Roue de FrictionHamza Kerroum100% (2)
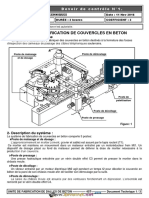
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenDocumento7 páginasDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenKämîŁyä Nádïta100% (1)
- TD Train ÉpicycloïdalDocumento5 páginasTD Train Épicycloïdalpapouch1350% (2)
- 08 Maquette Embrayag DisqueDocumento5 páginas08 Maquette Embrayag Disquederwiche100% (1)
- 31 EmbrayagesDocumento12 páginas31 EmbrayagesSimoMonkad100% (1)
- Roues de FrictionDocumento2 páginasRoues de FrictionKamel Bousnina0% (1)
- Révision Engrenage 2020Documento15 páginasRévision Engrenage 2020Yosr Ben SaidAinda não há avaliações
- Résumé de TransmissionDocumento3 páginasRésumé de TransmissionHafida EnnajiAinda não há avaliações
- TD TRAIN EpicycloidalesDocumento2 páginasTD TRAIN EpicycloidalesIlyas MhammediAinda não há avaliações
- Cours de 2STE TransmissionDocumento40 páginasCours de 2STE TransmissionJeulin Marabou60% (5)
- Chapitre 1 Liaison Complete ProfDocumento6 páginasChapitre 1 Liaison Complete ProfsldwAinda não há avaliações
- TD Trains Epicycloidaux PDFDocumento3 páginasTD Trains Epicycloidaux PDFHechmi Chermiti100% (2)
- b13 Guidage en RotationDocumento7 páginasb13 Guidage en Rotationncibm67% (3)
- 01 Tour ParalleleDocumento7 páginas01 Tour ParallelekhocineAinda não há avaliações
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDocumento6 páginasCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelAinda não há avaliações
- TD Vis EcrouDocumento3 páginasTD Vis EcrouHoussam Had33% (3)
- TD Boite de CommandeDocumento2 páginasTD Boite de CommandeYoussef Trimech100% (1)
- Dossier Réponse CorrigéDocumento5 páginasDossier Réponse CorrigéMrnadhir MecaniqueAinda não há avaliações
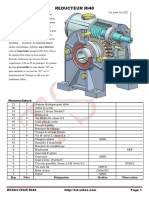
- 34 Reducteur PDFDocumento2 páginas34 Reducteur PDFkhocine67% (6)
- TD Vérin Rotatif Amorti ÉlèveDocumento5 páginasTD Vérin Rotatif Amorti ÉlèveZAEKHK ZEIGZA100% (2)
- ds20304r1 ModelDocumento14 páginasds20304r1 ModelChokri Atef50% (2)
- Embrayages Frein 10 11 12 PDFDocumento7 páginasEmbrayages Frein 10 11 12 PDFmohamed1101100% (1)
- Exercice Limiteur de CoupleDocumento4 páginasExercice Limiteur de CoupleMortadha Rabah100% (1)
- Cours EngrenagesDocumento5 páginasCours EngrenagesJesuis ContentAinda não há avaliações
- Transmettre-2SMB Eleve 2014Documento81 páginasTransmettre-2SMB Eleve 2014mdrougui100% (8)
- TD FreinDocumento5 páginasTD FreinHamami AymenAinda não há avaliações
- Serietambour MotoreducteurDocumento6 páginasSerietambour Motoreducteurpaire animeAinda não há avaliações
- 16-Polie Courroie PDFDocumento2 páginas16-Polie Courroie PDFHanane TounsiAinda não há avaliações
- Accouplements Embrayage ApplicationsDocumento5 páginasAccouplements Embrayage ApplicationsdjalikadjouAinda não há avaliações
- TP FiletageDocumento5 páginasTP FiletageSaid Djaballah100% (2)
- Reducteur RI40Documento6 páginasReducteur RI40watsop75% (4)
- Tronconneuse AutomatiseeDocumento2 páginasTronconneuse AutomatiseeRouaissi RidhaAinda não há avaliações
- Exercice Limiteur de Couple Transmissible ÉèveDocumento2 páginasExercice Limiteur de Couple Transmissible Éèvemohamed1101Ainda não há avaliações
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocumento14 páginasChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsAinda não há avaliações
- Lecture Dessin EnsembleDocumento17 páginasLecture Dessin Ensemblemarwen100% (1)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train Simple PDFDocumento6 páginasTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train Simple PDFSofiane Redjradj100% (1)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDocumento6 páginasTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimplehoubaAinda não há avaliações
- 2210192Documento8 páginas2210192Sofiene GuedriAinda não há avaliações
- TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocumento10 páginasTD 19 - Lois Entrée-Sortie en Position Et en Vitessebhs channel100% (2)
- Mi Iv 321 A PDFDocumento9 páginasMi Iv 321 A PDFKhadija LabriziAinda não há avaliações
- Académie de Paris - Démarches Déductive Et InductiveDocumento2 páginasAcadémie de Paris - Démarches Déductive Et InductiveKhadija LabriziAinda não há avaliações
- Demarche Pedagogique PDFDocumento14 páginasDemarche Pedagogique PDFKhadija Labrizi100% (1)
- F2 Les UsinagesDocumento5 páginasF2 Les UsinagesYoussef FathAinda não há avaliações
- 239 08-2 Exercices de Lecture de SpecificationsDocumento3 páginas239 08-2 Exercices de Lecture de SpecificationsKhadija LabriziAinda não há avaliações
- Fab CoursDocumento20 páginasFab CoursELMustaphaELMoukhtariAinda não há avaliações
- BorneDocumento3 páginasBorneAziz AmtdiAinda não há avaliações
- Capteur PneumatiqueDocumento1 páginaCapteur PneumatiqueKhadija Labrizi100% (1)
- TDchainonsDocumento1 páginaTDchainonsKhadija LabriziAinda não há avaliações
- TD Elaboration Des GammesDocumento9 páginasTD Elaboration Des GammesKhadija Labrizi100% (1)
- MRPDocumento6 páginasMRPdoubeAinda não há avaliações
- Couple Outil-Piece 3Documento4 páginasCouple Outil-Piece 3Mohamed Abed100% (1)
- Implant Outils v24wDocumento25 páginasImplant Outils v24wKhadija LabriziAinda não há avaliações
- Isostatisme (Partie1) ReDocumento4 páginasIsostatisme (Partie1) Re0001fredAinda não há avaliações
- MipmaprempliDocumento8 páginasMipmaprempliKhadija LabriziAinda não há avaliações
- 8 Exercices Lecture Specifications 2Documento33 páginas8 Exercices Lecture Specifications 2Khadija LabriziAinda não há avaliações
- Mip MapDocumento3 páginasMip MapKhadija LabriziAinda não há avaliações
- DRAFT - Cours OCO - Part1Documento32 páginasDRAFT - Cours OCO - Part1Khennoune WissamAinda não há avaliações
- Les Approches Managériales Basées Sur Les Parties PrenantesDocumento4 páginasLes Approches Managériales Basées Sur Les Parties PrenantesNohaila BencherquiAinda não há avaliações
- Manuel C2Documento140 páginasManuel C2Daniel AndriamananaAinda não há avaliações
- Chapitre 3 Ressources Réserves PlanificationDocumento10 páginasChapitre 3 Ressources Réserves PlanificationAdlaneAinda não há avaliações
- Exercice 3Documento1 páginaExercice 3test lili100% (1)
- ProjetDocumento4 páginasProjetEya AwadiAinda não há avaliações
- RapportDocumento125 páginasRapportKawtar L AzaarAinda não há avaliações
- Cevap AnahtarıDocumento1 páginaCevap AnahtarıVeliAinda não há avaliações
- MicrobiologieDocumento5 páginasMicrobiologieInes FirasAinda não há avaliações
- ContexteDocumento2 páginasContextehibaouafi502Ainda não há avaliações
- RIB CopieDocumento1 páginaRIB CopieAbdoulaye CisséAinda não há avaliações
- 5-Focales-Episode-2-Planification Et RégulationDocumento42 páginas5-Focales-Episode-2-Planification Et RégulationTaffyd MaertinsAinda não há avaliações
- 1 - Cours2 Hydraulique Et Pneumatique (2éme Année Électromécanique)Documento16 páginas1 - Cours2 Hydraulique Et Pneumatique (2éme Année Électromécanique)Mohamed Hechmi JERIDIAinda não há avaliações
- 2M120 TD 2016 ch1 Codes CorrecteursDocumento2 páginas2M120 TD 2016 ch1 Codes CorrecteurskokiAinda não há avaliações
- Brochure Nissan Urvan N350 15 PlacesDocumento14 páginasBrochure Nissan Urvan N350 15 PlaceskoneAinda não há avaliações
- QP1C General 1 PDFDocumento5 páginasQP1C General 1 PDFSamson KlouganAinda não há avaliações
- EKIP360 PrestationsTarifications LFRDocumento30 páginasEKIP360 PrestationsTarifications LFRtouzanimahdiAinda não há avaliações
- Corrige Serie5Documento4 páginasCorrige Serie5Chef FatimaAinda não há avaliações
- Programme Maths cm2Documento1 páginaProgramme Maths cm2gorguy100% (1)
- World of Warcraft - Wrath of The Lich King - Arthas, My SonDocumento4 páginasWorld of Warcraft - Wrath of The Lich King - Arthas, My SonAdrian Angel LagrecaAinda não há avaliações
- Secours en Cours de RouteDocumento32 páginasSecours en Cours de Routeantonio59100Ainda não há avaliações
- Phrases À Remettre Dans L'ordreDocumento9 páginasPhrases À Remettre Dans L'ordreSylvie DinisAinda não há avaliações
- Formation - PDF - Robotique - Mécatronique PDFDocumento9 páginasFormation - PDF - Robotique - Mécatronique PDFHachicha SaberAinda não há avaliações
- CH1 (Introduction Au SI) PDFDocumento17 páginasCH1 (Introduction Au SI) PDFEL OUAZZANI PRINTAinda não há avaliações
- Laddition Des Nombres Entiers CM2Documento8 páginasLaddition Des Nombres Entiers CM2chantal.aboujaoudehAinda não há avaliações
- Serveur D'impression Sous Windows 2003Documento6 páginasServeur D'impression Sous Windows 2003Issam BammouAinda não há avaliações
- Examen Corrigé Marketing - Questionnaire À Choix Multiple (QCM)Documento7 páginasExamen Corrigé Marketing - Questionnaire À Choix Multiple (QCM)Mar IemAinda não há avaliações
- Catalogue OKOFEN 2018 2019Documento68 páginasCatalogue OKOFEN 2018 2019joseph38Ainda não há avaliações
- Método de Violino - CajatiDocumento41 páginasMétodo de Violino - CajatiWalmir PaiãoAinda não há avaliações
- Biochimie 08 - Réplication Et Réparation Des Erreurs AssociéesDocumento14 páginasBiochimie 08 - Réplication Et Réparation Des Erreurs AssociéesNathan CohenAinda não há avaliações