Escolar Documentos
Profissional Documentos
Cultura Documentos
Lugar Geometrico Das Raizes Incremental e Sua Aplicacao Na Sintonia de Controladores Pid
Enviado por
Tiago BalbinoDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Lugar Geometrico Das Raizes Incremental e Sua Aplicacao Na Sintonia de Controladores Pid
Enviado por
Tiago BalbinoDireitos autorais:
Formatos disponíveis
SILVIO CELSO PEIXOTO GOMES
LUGAR GEOMTRICO DAS RAZES INCREMENTAL E SUA
APLICAO NA SINTONIA DE
CONTROLARES PID.
SO CAETANO DO SUL
2009
SILVIO CELSO PEIXOTO GOMES
LUGAR GEOMTRICO DAS RAZES INCREMENTAL E SUA
APLICAO NA SINTONIA DE
CONTROLARES PID.
Dissertao apresentada Escola de Engenharia
Mau do Centro Universitrio do Instituto Mau
de Tecnologia para obteno do ttulo de Mestre
em Engenharia de Processos Qumicos e
Bioqumicos.
Linha de Pesquisa: Anlise e Controle de
Processos Qumicos.
Orientador: Prof. Dr. Fabrizio Leonardi
SO CAETANO DO SUL
2009
FICHA CATALOGRFICA
Gomes, Silvio Celso Peixoto
Lugar Geomtrico das Razes Incremental e sua aplicao na sintonia de
controladores P.I.D / Silvio Celso Peixoto Gomes. So Caetano do Sul, SP:
CEUN-EEM, 2009. 61p.
Dissertao (Mestrado) - Escola de Engenharia Mau do Centro Universitrio
do Instituto Mau de Tecnologia, So Caetano do Sul, SP, 2009.
1.Lugar Geomtrico das Razes Incremental 2. Sintonia PID
3.Controlador de dois graus de liberdade I.Instituto Mau de
Tecnologia. Centro Universitrio. Escola de Engenharia Mau.
felizes so aqueles que se
aproximam das pessoas
que detm a sabedoria
O Autor.
DEDICATRIA
Dedico esta dissertao s minhas filhas Giovana e Isabela pelo amor e carinho de um
pai a seus filhos.
minha esposa gueda que procurou me auxiliar da melhor forma possvel,
oferecendo apoio, contribuio e muita colaborao.
Aos meus pais, por sua insistncia e incentivo em que eu continuasse a minha
formao em educao.
AGRADECIMENTOS
A Deus, pela satisfao na construo desse trabalho, fruto de dedicao e
perseverana.
Ao professor Dr. Cludio Garcia, que me acolheu, primeiramente, e me concedeu a
oportunidade de trabalhar com o Professor Dr. Fabrizio Leonardi.
Ao professor Dr. Fabrizio Leonardi, pela sua capacidade de orientao que me
conduziu da melhor forma, por sua sabedoria brilhante, fazendo-me entender os momentos
difceis da conduo do trabalho.
Ao professor Dr. Jaime Jos da Cruz, que ofereceu sua preciosa contribuio para a
construo desse conhecimento.
Escola de Engenharia Mau, pela estrutura e recursos fornecidos e principalmente
direo do curso de ps-graduao strictu-senso.
Fundao Salvador Arena, por seus preciosos recursos oferecidos e oportunidades
de transformao no material humano.
Ao professor Valcir Shigueru Omori, por seu apoio, sua confiana e suas orientaes.
Aos professores doutores Wilson Carlos da Silva Jnior e Daniel de Oliveira membros
integrantes da Faculdade de Tecnologia Termomecnica por sua colaborao e auxlio na
tomada de deciso e fechamento do trabalho.
RESUMO
A proposta deste trabalho propor a aplicao da propriedade incremental do mtodo
do Lugar Geomtrico das Razes no projeto de controladores do tipo PID Proporcional,
Integral e Derivativo. A tcnica proposta de projeto tem duas etapas. Inicialmente deve-se
submeter o sistema a uma excitao tipo degrau, a partir de um ensaio preliminar em malha
fechada com um controlador proporcional. Em seguida, o projeto do controlador se
desenvolve com a tcnica de cancelamento de plos, resultando numa lei de controle PID com
dois graus de liberdade. Mostra-se que a dinmica de acompanhamento do sinal de referncia
prxima a um sistema de primeira ordem, nos casos para os quais a resposta do ensaio
preliminar for prxima a um sistema de segunda ordem. Para ilustrar o procedimento
proposto, so apresentados alguns projetos por meio de simulao e suas respostas,
comparadas a outras tcnicas de projeto de controladores PID. Como aplicao prtica real
considerou-se o controle de posio de um servomecanismo.
Palavras chave: Lugar Geomtrico das Razes Incremental, Sintonia PID, Controlador de
dois graus de liberdade.
ABSTRACT
This work discusses the Incremental Root Locus property and one application on PID
controllers tuning. The proposed procedure for tuning PID controllers has two steps. Firstly it
is necessary to perform a step response test using a proportional controller. In a second step
the compensator design is performed by a zero-pole cancelling. The obtained control law is a
two-degree-of-freedom PID controller with the setpoint tracking and disturbance rejection
done by different dynamics. It is shown that the setpoint tracking exhibits a first order
dynamic every time the preliminary test exhibits a response that could be approximated for a
second order response whereas the one associated with the disturbance rejection exhibits a
more complex dynamic since it includes the one from the preliminary test. As illustrations,
some design projects were done by simulation and a practical application to a servo system
position control is included.
Keywords: Incremental Root Locus, PID Tuning, Two-degree of freedom controller.
LISTA DE FIGURAS
FIGURA 2.1 CONTROLE EM MALHA ABERTA.............................................................................................. 05
FIGURA 2.2 CONTROLE EM MALHA FECHADA............................................................................................ 06
FIGURA 2.3 FUNO CARACTERSTICA DO CONTROLADOR ON-OFF................................................... 07
FIGURA 2.4 CONTROLADOR PID EM MALHA FECHADA........................................................................... 09
FIGURA 2.5 PADRO DE RESPOSTA AO DEGRAU....................................................................................... 09
FIGURA 2.6 PARMETROS DA RESPOSTA EM MALHA ABERTA............................................................. 10
FIGURA 2.7 PERIODO CRTICO DA RESPOSTA DE MALHA FECHADA.................................................... 11
FIGURA 2.8 ENSAIO EM MALHA FECHADA COM REL............................................................................. 12
FIGURA 3.1 SISTEMA DE CONTROLE DE MALHA FECHADA.................................................................... 18
FIGURA 3.2 ANLISE DO LGR INCREMENTAL............................................................................................. 21
FIGURA 3.3 DIAGRAMA EQUIVALENTE AO DO LGRI................................................................................. 21
FIGURA 3.4 LUGAR GEOMTRICO DAS RAZES EM FUNO DO GANHO K ....................................... 22
FIGURA 3.5 LUGAR DAS RAIZES EM FUNO DE K................................................................................. 22
FIGURA 3.6 ENSAIO PRELIMINAR.................................................................................................................... 23
FIGURA 3.7 SISTEMA DE CONTROLE PROPOSTO........................................................................................ 27
FIGURA 3.8 ESTRUTURA TDOF COM CONTROLADORES PID................................................................... 28
FIGURA 3.9 CONTROLE COM PR FILTRO.................................................................................................... 31
FIGURA 4.1 ESTRUTURA DO SISTEMA DE CONTROLE............................................................................... 33
FIGURA 4.2 ENSAIO PRELIMINAR.................................................................................................................... 35
FIGURA 4.3 RESPOSTA A VARIAO DE REFERENCIA.............................................................................. 36
FIGURA 4.4 RESPOSTA AO DISTRBIO........................................................................................................... 37
FIGURA 4.5 ENSAIO PRELIMINAR.................................................................................................................... 39
FIGURA 4.6 RESPOSTA A VARIAO DE REFERENCIA.............................................................................. 40
FIGURA 4.7 RESPOSTA AO DISTRBIO........................................................................................................... 41
FIGURA 4.8 ENSAIO PRELIMINAR.................................................................................................................... 43
FIGURA 4.9 RESPOSTA A VARIAO DE REFERENCIA.............................................................................. 44
FIGURA 4.10 RESPOSTA AO DISTRBIO........................................................................................................... 45
FIGURA 4.11 ENSAIO PRELIMINAR.................................................................................................................... 47
FIGURA 4.12 RESPOSTA A VARIAO DE REFERENCIA.............................................................................. 48
FIGURA 4.13 RESPOSTA AO DISTRBIO........................................................................................................... 49
FIGURA 4.14 TROCADOR DE CALOR CASCO-TUBO...................................................................................... 50
FIGURA 4.15 ENSAIO PRELIMINAR.................................................................................................................... 52
FIGURA 4.16 RESPOSTA A VARIAO DE REFERENCIA.............................................................................. 53
FIGURA 4.17 RESPOSTA AO DISTRBIO........................................................................................................... 54
FIGURA 4.18 ENSAIO PRELIMINAR SISTEMA SERVO................................................................................... 56
FIGURA 4.19 DESEMPENHO EXPERIMENTAL SISTEMA SERVO................................................................. 56
FIGURA 4.20 RESPOSTA DE UM SISTEMA SUBAMORTECIDO.................................................................... 57
LISTA DE TABELAS
TABELA 2.1 PRIMEIRO MTODO DE ZIEGLER E NICHOLS............................................................. 10
TABELA 2.2 SEGUNDO METODO DE ZIEGLER e NICHOLS.............................................................. 11
TABELA 2.3 SINTONIA PROPOSTA PELO METODO DE COHEN E COON...................................... 13
TABELA 2.4 CONSTANTES DO PROBLEMA REGULADOR............................................................... 14
TABELA 2.5 CONSTANTES DO PROBLEMA SERVO.......................................................................... 15
TABELA 2.6 SINTONIA DE TAVAKOLI E TAVAKOLI........................................................................ 15
TABELA 2.7 SINTONIA PID DA SNTESE DIRETA.............................................................................. 16
TABELA 3.1 RESPOSTA DO SISTEMA COM AMORTECIMENTO CRTICO.................................... 26
TABELA 3.2 SINTONIA PID...................................................................................................................... 29
TABELA 4.1a DADOS COLETADOS REFERNCIA............................................................................. 38
TABELA 4.1b DADOS COLETADOS DISTRBIO................................................................................. 38
TABELA 4.2a DADOS COLETADOS REFERNCIA............................................................................. 42
TABELA 4.2b DADOS COLETADOS DISTRBIO................................................................................. 42
TABELA 4.3a DADOS COLETADOS REFERNCIA............................................................................. 46
TABELA 4.3b DADOS COLETADOS DISTRBIO................................................................................. 46
TABELA 4.4a DADOS COLETADOS REFERNCIA............................................................................. 49
TABELA 4.4b DADOS COLETADOS DISTRBIO................................................................................. 50
TABELA 4.5a DADOS COLETADOS REFERNCIA............................................................................. 54
TABELA 4.5b DADOS COLETADOS DISTRBIO................................................................................. 54
TABELA 4.6 FRMULAS SIMPLIFICADAS DE SINTONA.................................................................. 58
LISTA DE SMBOLOS
LGR lugar geomtrico das razes
LGRI lugar geomtrico das razes incremental
PID Proporcional, Integral e Derivativo
TDOF Two Degree of Freedom
tempo morto da planta
constante de tempo da planta
c
constante de tempo desejada de malha fechada
K ganho da planta
K variao do ganho K
Kg ganho da funo de transferncia de malha fechada da malha interna
Kcr ganho crtico
Pcr perodo crtico
a amplitude da oscilao crtica
G(s) planta
A(s) funo de transferncia do controlador por cancelamento de plos e zeros
C(s) funo de transferncia do controlador
F(s) funo de transferncia de malha fechada da malha interna
Kp
ganho proporcional do controlador PID
Ki
ganho integral do controlador PID
Ti tempo de integrao do controlador PID
Kd
ganho derivativo do controlador PID
Td tempo derivativo do controlador PID
Ts tempo de acomodao
T pseudo perodo da resposta subamortecida
Kpre
ganho do ensaio preliminar
Klocus ganho do controlador LGRI.
r(t) sinal de referncia da malha externa
m(t) sinal de sada do controlador
u(t) sinal de entrada da planta.
d(t) sinal de distrbio
e(t) sinal de erro
v(t) sinal de referncia da malha interna.
v variao do sinal v(t)
y(t) sinal de sada da planta
y variao do sinal y(t)
T(s) funo de transferncia de malha fechada da referncia para a sada
T
D
(s) funo de transferncia de malha fechada do distrbio para a sada
d
mdulo do valor da parte real do plo complexo.
d
mdulo do valor da parte imaginria do plo complexo.
a
origem das assntotas.
a
ngulo das assntotas.
SUMRIO
1. INTRODUO.......................................................................................................................... 1
1.1. PROPOSTA................................................................................................................................ 1
1.2. MOTIVAO............................................................................................................................ 1
1.3. OBJETIVO................................................................................................................................. 2
1.4. ESTRUTURA DO TEXTO....................................................................................................... 2
2. REVISO BIBLIOGRFICA.................................................................................................. 3
2.1. DEFINIES............................................................................................................................. 3
2.2. ESTRUTURAS DE CONTROLE............................................................................................. 4
2.2.1. MALHA ABERTA..................................................................................................................... 4
2.2.2. MALHA FECHADA.................................................................................................................. 5
2.3. AES DE CONTROLE.......................................................................................................... 6
2.3.1. CONTROLADOR ON-OFF...................................................................................................... 7
2.3.2. CONTROLADOR PROPORCIONAL INTEGRAL DERIVATIVO (PID) ......................... 7
2.4. MTODOS DE SINTONIA DE CONTROLADORES PID .................................................. 8
2.4.1. MTODOS HEURSTICOS DE ZIEGLER E NICHOLS .................................................... 9
2.4.2. MTODO HEURSTICO DO REL EM MALHA FECHADA........................................ 12
2.4.3. MTODO HEURSTICO DE COHEN-COON.................................................................... 13
2.4.4. MTODO HEURSTICO DA INTEGRAL DA FUNO DE ERRO............................... 13
2.4.5. MTODO ANALTICO DA SNTESE DIRETA................................................................. 16
2.4.6. OUTROS MTODOS DE PROJETO PID............................................................................ 16
3. MTODO DO LUGAR GEOMTRICO DAS RAZES INCREMENTAL...................... 18
3.1 MTODO DO LUGAR DAS RAZES................................................................................... 18
3.1.1. RESUMO DAS REGRAS DE CONSTRUO DO LGR.................................................... 19
3.2. PROPRIEDADE INCREMENTAL DO MTODO DO LUGAR DAS RAZES .............. 20
3.3 O PROJETO DE CONTROLADORES PID BASEADO NO LGRI................................... 22
3.3.1. ENSAIO PRELIMINAR ......................................................................................................... 23
3.3.1.1. SISTEMAS SUBAMORTECIDOS ........................................................................................ 24
3.3.1.2. SISTEMAS SUPERAMORTECIDOS ................................................................................... 25
3.3.1.3. SISTEMAS COM AMORTECIMENTO CRTICO............................................................ 26
3.3.2. CANCELAMENTO DE PLOS E ZEROS.......................................................................... 27
3.4 O CONTROLADOR PID DE DOIS GRAUS DE LIBERDADE (TDOF) .......................... 28
3.4.1. ESTRUTURA DO CONTROLADOR TDOF ....................................................................... 28
3.4.2. LEI DE CONTROLE DO CONTROLADOR TDOF........................................................... 29
3.4.3. PID REAL................................................................................................................................. 30
3.4.4. DINMICA DA REJEIO AO DISTRBIO.................................................................... 30
4. ANLISE DE DESEMPENHO.............................................................................................. 33
4.1. DESEMPENHO VIA SIMULAO ..................................................................................... 33
4.1.1. SISTEMA MARGINALMENTE ESTVEL ........................................................................ 33
4.1.1.1. PROJETO PID PELO MTODO DO REL........................................................................ 34
4.1.1.2. PROJETO LRGI. ..................................................................................................................... 34
4.1.1.3. COMPARATIVO..................................................................................................................... 36
4.1.2. SISTEMA BENCHMARKING............................................................................................... 38
4.1.2.1. PROJETO PID PELO SEGUNDO MTODO DE ZIEGLER E NICHOLS..................... 38
4.1.2.2. PROJETO LRGI...................................................................................................................... 39
4.1.2.3. COMPARATIVO..................................................................................................................... 40
4.1.3. SISTEMA COM RESPOSTA INVERSA .............................................................................. 42
4.1.3.1. PROJETO PID PELO SEGUNDO MTODO DE ZIEGLER E NICHOLS..................... 42
4.1.3.2. PROJETO LRGI. ..................................................................................................................... 43
4.1.3.3. COMPARATIVO..................................................................................................................... 44
4.1.4. SISTEMA TRMICO COM TEMPO MORTO................................................................... 46
4.1.4.1. PROJETO PID PELO MTODO DE COHEN E COON.................................................... 46
4.1.4.2. PROJETO LRGI...................................................................................................................... 47
4.1.4.3. COMPARATIVO..................................................................................................................... 48
4.1.5. SISTEMA TROCADOR DE CALOR.................................................................................... 50
4.1.5.1. PROJETO PID PELO MTODO DA SNTESE DIRETA................................................. 51
4.1.5.2. PROJETO LRGI...................................................................................................................... 51
4.1.5.3. COMPARATIVO..................................................................................................................... 52
4.2. DESEMPENHO PRTICO.................................................................................................... 55
4.3. FRMULAS SIMPLIFICADAS DE SINTONIA................................................................. 57
5. CONCLUSES ........................................................................................................................ 59
REFERNCIAS BIBLIOGRFICAS ................................................................................................... 60
1. INTRODUO
Este captulo apresenta a proposta deste trabalho que envolve a aplicao da
propriedade incremental do mtodo do lugar geomtrico no projeto de controladores PID.
Apresenta-se tambm aqui, a motivao, o objetivo e a estrutura do texto.
1.1. Proposta
Investigar a aplicao da propriedade incremental do mtodo do lugar geomtrico das
razes (LGR) no projeto de controlador PID. Utilizando-se a propriedade incremental,
podemos considerar que: dada uma posio da representao de plos do LGR de um sistema
em malha fechada, poderemos consider-los como plos de malha aberta para um novo
problema de traado do LGR. Essa propriedade conduz a uma caracterstica incremental do
prprio traado do LGR. Na literatura clssica aparecem vrios mtodos de projeto de
controladores PID. Definem-se basicamente duas classes de mtodos. A classe dos mtodos
analticos usa o modelo rigoroso da planta para o projeto do controlador. Baseando-se na
teoria de controle linear, podemos dizer que, para realizar o projeto, ser necessrio conhecer
os plos, os zeros e o ganho da Planta.
Outros mtodos utilizam um ensaio preliminar, e so normalmente designados por
mtodos heursticos. Em geral, so mais adequados aos casos para os quais o modelo da
planta desconhecido, ou mesmo, quando a sua modelagem se torna invivel. Nessa classe de
problemas podemos listar o mtodo precursor de Ziegler e Nichols (1942) e o mtodo de
Cohen e Coon (1953).
1.2. Motivao
Historicamente identificam-se dois mtodos pioneiros de sintonia de controladores
PID, apresentados por Ziegler e Nichols (1942). Essas tcnicas foram amplamente utilizadas
em aplicaes industriais e oferecem condies favorveis por conta de sua forma simples de
utilizao. Porm, podem ocorrer casos no qual o seu emprego venha a se tornar invivel.
O primeiro mtodo apresentado bastante restritivo, pois exige que a planta seja
estvel em malha aberta. Sendo assim, no deve possuir elementos integradores e no conter
plos no semi-plano direito s. Alm disso, esse mtodo exige que a resposta da planta ao um
degrau de referncia apresente um aspecto similar a uma letra S.
O segundo mtodo exige que a planta alcance o limite de estabilidade em malha
fechada de forma a exibir oscilaes auto-sustentadas quando submetida a um controle
proporcional. O mtodo de sintonia proposto neste trabalho pode ser considerado menos
restritivo quando comparado ao mtodo de Ziegler e Nichols (1942), pois no exige que o
sistema a ser controlado apresente na sada, oscilaes auto-sustentadas e no exige a
condio de estabilidade da planta em malha aberta.
As bases deste trabalho esto concentradas no mtodo do Lugar Geomtrico das
Razes e na utilizao de sua propriedade no projeto de controladores do tipo PID.
1.3. Objetivo
O principal objetivo deste trabalho propor um mtodo baseado na aplicao da
propriedade incremental do LGR no projeto de controladores PID. A eficincia do controlador
obtido medida como a capacidade do sistema de acompanhar sinais de referncia, rejeitar
sinais de distrbio, em funo do esforo de controle solicitado.
1.4. Estrutura do Texto
O captulo um apresenta uma introduo com o propsito de promover um convite
leitura do texto.
O captulo dois apresenta uma reviso bibliogrfica dos sistemas de controle,
evidenciando a malha de controle, alguns tipos de controladores e mtodos clssicos de
sintonia analticos e heursticos.
O captulo trs apresenta o mtodo LGR e suas regras clssicas de construo do seu
traado, evidenciando a propriedade incremental.
O captulo quatro analisa, via simulao, o desempenho do controlador PID projetado
com base na propriedade incremental do LGR, em comparao com projetos de controladores
PID sintonizados por meio de outras tcnicas consolidadas da rea de controle de processos.
Faz-se tambm uma aplicao prtica de controle de posio de um servomecanismo.
O captulo cinco apresenta a concluso e as possveis contribuies futuras.
Por fim, a referncias bibliogrficas so apresentadas.
2. REVISO BIBLIOGRFICA
Esse captulo apresenta um resumo sobre os fundamentos dos sistemas controle, suas
definies bsicas, estruturas tpicas, tipos de aes de controle e uma reviso bibliogrfica
dos mtodos de sintonia heursticos e analticos de controladores.
2.1. Definies
O controle automtico tem desempenhado um papel fundamental no avano da
engenharia e da cincia, sendo essencial, por exemplo, nas operaes de controle de nvel em
reservatrios, presso em vasos, temperatura e vazo dos diversos fludos lquidos, slidos e
gasosos. Tambm esto presentes no controle de outras variveis como o caso da umidade,
do potencial hidrogeninico (pH), da viscosidade, entre outras.
A seguir, tm-se as definies bsicas dos elementos e sinais tpicos em um sistema de
controle (OGATA, 2003)
Planta: um sistema a ser controlado, que pode ser parte ou um conjunto de
equipamentos.
Controlador: elemento cuja funo restabelecer o valor da varivel de sada do
sistema de controle ao seu valor de referncia, e rejeitar distrbios.
Varivel controlada: grandeza ou condio medida a ser controlada.
Varivel manipulada: grandeza ou condio modificada pelo controlador.
Sinal de referncia: representa, em funo do tempo, os valores desejados para a
varivel controlada.
Distrbio: sinal que tende a afetar de maneira adversa o valor da varivel
controlada de um sistema e sobre o qual no se pode agir.
Neste trabalho, considera-se tambm a seguinte definio:
Esforo de controle: intensidade mxima do sinal da varivel manipulada.
2.2. Estruturas de Controle
Uma estrutura de controle, ou estratgia de controle, o conjunto de elementos
interligados de certa forma, com a funo de realizar operaes que permitam o controle do
processo.
Nas representaes formais dos sistemas de controle, empregam-se os diagramas de
blocos. Porm, na documentao de plantas industriais, os sistemas de controle so
normalmente representados na forma de diagramas de tubulao e instrumentao (P&ID).
Nos P&ID encontram-se, tipicamente, os seguintes elementos para representar uma
sistema de controle (GARCIA, 2003).
Elemento primrio: elemento de medio, ou transdutor, que converte a varivel
do processo em uma forma mensurvel.
Transmissor: converte o valor da varivel medida em um sinal eletrnico ou
pneumtico.
Conversor: converte um sinal em outro tipo de sinal.
Receptor: recebe o sinal transmitido e o disponibiliza para compor a
ao de controle.
Elemento final de controle: atua diretamente no processo para realizar ao de controle.
Atuador: elemento com a funo de operar os elementos finais de
controle.
A seguir detalham-se as duas estratgias de controle que so fundamentais no
desenvolvimento deste trabalho.
2.2.1. Malha Aberta
Segundo Dorf e Bishop (2001), um sistema de controle em malha aberta utiliza o
controlador para fazer a sada acompanhar o sinal de referncia de forma direta, sem usar
nenhuma informao da varivel controlada, ou seja, sem realimentao. A figura 2.1. mostra
o diagrama de blocos de um sistema de controle em malha aberta, em que C(s) a funo de
transferncia do controlador, G(s) a funo de transferncia da planta incluindo o atuador e o
sensor, e R(s) e Y(s) as transformadas de Laplace dos sinais r(t) e y(t), respectivamente.
FIGURA 2.1 CONTROLE EM MALHA ABERTA.
Algumas das vantagens do controle em malha aberta so:
Possui custo reduzido, pois no necessrio medir a varivel controlada.
No apresenta grandes dificuldades quanto estabilidade, pois a estabilidade
do sistema todo dada pela estabilidade individual da planta e do controlador.
O projeto do controlador simples, e comumente determinado a partir da
funo inversa da planta.
Por outro lado, algumas das desvantagens do controle em malha aberta so:
No rejeita rudos ou perturbaes.
No compensa erros de modelagem.
Normalmente, os rudos, perturbaes e os erros de modelagem esto presentes numa
situao real. Assim, o controle em malha aberta s razovel quando as especificaes de
desempenho forem pouco restritivas.
2.2.2. Malha Fechada
Uma soluo quando as especificaes de desempenho so restritivas, o emprego da
realimentao.
Na estratgia de controle de malha fechada, o valor medido da varivel controlada y(t),
comparado com o valor de referncia r(t) para com o erro, e(t) = r(t) - y(t), o controlador
determinar o valor da varivel manipulada que deve ser uma ao corretiva para levar a
varivel controlada ao seu valor de referncia. A figura 2.2. apresenta a estrutura tpica de
controle de malha fechada.
FIGURA 2.2 CONTROLE EM MALHA FECHADA.
Algumas das vantagens do controle em malha fechada so:
possvel compensar rudos e perturbaes.
possvel compensar incertezas do modelo da planta, ou seja, possvel lidar
com o problema de robustez.
Por outro lado, algumas das desvantagens do controle em malha fechada so:
Possui custo superior quando comparado com o controle em malha aberta, pois
necessrio usar um sensor para medir a varivel controlada.
Pode apresentar dificuldades quanto estabilidade, pois a estabilidade do
sistema de controle no trivialmente dada pela estabilidade individual da
planta e do controlador e, mesmo com essas duas funes estveis, pode-se ter
um sistema instvel.
O projeto do controlador normalmente mais complexo que o da malha aberta.
Existem ainda vrias outras estratgias de controle, a exemplo do controle em avano,
do controle em cascata e das estratgias usadas para sistemas multivariveis. Entretanto, elas
no foram includas nesta reviso por no estarem explicitamente relacionadas com os
objetivos deste trabalho.
2.3. Aes de Controle
Nesta seo apresentam-se os controladores ON-OFF e PID, que so aqueles
utilizados nos projetos e simulaes ao longo deste trabalho.
2.3.1. Controlador On-Off
Sua operao constituda por dois estados. Quando a varivel controlada ultrapassa o
valor de referncia e vice-versa, a sada m(t) alterna seu estado que caracterizado por um
valor constante na sada do controlador. Um controlador On-Off pode atuar diretamente sobre
elementos finais de controle do tipo vlvula solenide ou rel. Para se evitar oscilaes em
torno do erro nulo, comum acrescentar-se uma histerese funo caracterstica. A figura 2.3
ilustra a funo caracterstica de um controlador On-Off sem histerese.
m(t)
e(t)
2.3.2. Controlador Proporcional Integral Derivativo (PID)
A lei de controle do controlador PID combina as aes proporcional, integral e
derivativa. Por causa da ao integral, o controlador consegue fazer a sada da planta
acompanhar, em regime, sinais constantes de referncia, alm de rejeitar, em regime,
perturbaes constantes de carga. A ao derivativa contribui para melhoria da velocidade de
resposta e a ao proporcional afeta o erro de regime para entradas, por exemplo, do tipo
rampa.
A equao 2.1 representa a funo de transferncia do controlador PID, em que Kp, Ki
e Kd so os ganhos: proporcional, integral e derivativo, respectivamente.
( ) .
Ki
C s Kp Kd s
s
= + +
( 2.1 )
A funo de transferncia do controlador PID muitas vezes representada na sua
forma equivalente da equao (2.2), em que Ti e Td so os tempos: integral e derivativo,
respectivamente.
FIGURA 2.3 FUNO CARACTERSTICA DO CONTROLADOR ON-OFF.
1
( ) 1 .
.
C s Kp s Td
s Ti
| |
= + +
|
\
( 2.2 )
2.4. Mtodos de Sintonia de Controladores PID
As principais especificaes de desempenho a serem alcanadas por um controlador
em malha fechada, segundo Altmann (2005), so, alm de conferir estabilidade:
reduzir o efeito do sinal de distrbio;
reduzir o transitrio na sada da planta devido a uma variao do sinal de referncia;
reduzir o mximo sobressinal durante o regime transitrio;
reduzir o tempo de resposta do sistema em regime transitrio;
reduzir o erro em regime estacionrio;
Para alcanar todas as especificaes de desempenho, pode-se deparar com uma
situao de conflito. Por exemplo, um ajuste que visa aperfeioar a resposta a um sinal de
referncia pode ser inadequado para uma boa rejeio de perturbaes.
A literatura de controle de processo apresenta inmeros mtodos de projeto de
controladores PID que se dividem basicamente em dois grupos: mtodos heursticos e
analticos. Considera-se aqui como mtodo heurstico todo aquele que necessita de um ensaio
preliminar com a planta para que da sua resposta se obtenham os valores notveis necessrios
ao projeto. Os demais, que usam um modelo mais rigoroso da planta, so considerados aqui
como mtodos analticos.
Os primeiros mtodos heursticos apareceram por volta de 1940, nas primeiras
dcadas de desenvolvimento de projeto de controladores e visam conferir uma taxa de
decaimento de nas amplitudes dos picos da oscilao do sinal de sada, cuja idia
associada ao tradicional mtodo de Ziegler e Nichols (1942). Todavia, relatam-se casos de
sistema de ordem superior, cuja aplicao dessa sintonia pode levar a respostas com
caractersticas indesejveis, por exemplo, com um sobressinal superior a 70% ou muito
oscilatrias, condies tipicamente no adequadas em aplicaes de controle nas plantas
industriais.
A seguir resumem-se os procedimentos de projeto de algumas das mais conhecidas
tcnicas de sintonia de controladores PID.
2.4.1. Mtodos Heursticos de Ziegler e Nichols
Considere um sistema de controle com um controlador PID, conforme a figura 2.4, em
que C(s) est na forma da equao 2.2.
FIGURA 2.4 CONTROLADOR PID EM MALHA FECHADA.
Ziegler e Nichols (1942) propuseram regras heursticas de sintonia que permitem o
ajuste dos parmetros Kp, Ti, Td. Suas regras so baseadas em experimentos de resposta ao
degrau em malha aberta (primeiro mtodo), ou em experimentos baseados no ganho de um
controlador proporcional que leva o sistema estabilidade marginal em malha fechada
(segundo mtodo).
No primeiro mtodo deve-se obter uma resposta experimental da planta em malha
aberta. Caso a resposta exiba um aspecto em S, como ilustrado na figura 2.5, esse mtodo
pode ser aplicado. Esse comportamento ocorre, normalmente, quando a planta no contm
integradores, estvel e no possui plos dominantes pouco amortecidos.
u(t)
y(t)
u(t)
t t
y(t)
FIGURA 2.5 PADRO DE RESPOSTA AO DEGRAU.
Se a resposta satisfaz essa condio de aspecto, o modelo linear da planta pode ser
considerado aproximadamente
s
e
s
K
s G
+
=
1
) (
,
( 2.3 )
em que o tempo morto aparente, a constante de tempo e K o ganho da funo de
transferncia. Esses valores podem ser extrados diretamente da curva de resposta, como
indicado na figura 2.6.
y(t)
FIGURA 2.6 PARMETROS DA RESPOSTA EM MALHA ABERTA.
A tabela 2.1 apresenta os valores sugeridos por Ziegler e Nichols (1942) para os
ganhos do controlador PID em funo dos valores notveis da curva de resposta, mas tambm
mostra os ganhos sugeridos, caso de controladores PI ou P.
TABELA 2.1 PRIMEIRO MTODO DE ZIEGLER E NICHOLS
Kp Ti Td
P
0
PI
0,9
0,3
0
PID
1,2
2 0,5
No segundo mtodo procede-se um teste inicial em malha fechada com =
i
T
e 0 =
d
T . Aumenta-se o valor de Kp desde zero at seu valor crtico Kcr , para o qual a sada
exibe pela primeira vez uma oscilao auto-sustentada de perodo Pcr , como ilustrado na
figura 2.7.
y(t)
t
FIGURA 2.7 PERIODO CRTICO DA RESPOSTA DE MALHA FECHADA.
Caso a sada no exiba oscilao auto-sustentada para nenhum valor de Kp , ento
esse mtodo no se aplica. A sintonia sugerida por Ziegler e Nichols (1942) no seu segundo
mtodo resumida na tabela 2.2.
TABELA 2.2 SEGUNDO METODO DE ZIEGLER e NICHOLS
Kp Ti Td
P
0, 5Kcr
0
PI
0, 45Kcr
1
1, 2
Pcr
0
PID
0, 6 Kcr 0, 5Pcr 0,125Pcr
Note-se que o PID sintonizado pelo 2 mtodo de Ziegler-Nichols resulta sempre em
uma funo de transferncia com um plo na origem e dois zeros reais e iguais na posio
4 s Pcr = , conforme equao 2.4.
2
4
( ) 0,075
s
Pcr
C s Kcr Pcr
s
| |
+
|
\
=
( 2.4 )
2.4.2. Mtodo Heurstico do Rel em Malha Fechada
Em sua publicao, Astrm e Hgglund (1988) apresentam um mtodo de sintonia de
controladores PID que ampliou as possibilidades do mtodo das oscilaes auto-sustentadas
de Ziegler e Nichols, no sentido que o mtodo permite obter o valor do perodo crtico Pcr e
do ganho crtico Kcr por meio de um ensaio mais apropriado para as aplicaes prticas.
Esse ensaio preliminar realizado em malha fechada com oscilaes limitadas no qual o
controlador opera como um rel que limita sua sada em h, como ilustrado na figura 2.8.
Na prtica, um controlador PID pode funcionar aproximadamente como um rel,
fazendo-se mximos os valores de Kp e Ti, e anulando o valor de Td. Normalmente, tambm
possvel ajustar o valor mximo da sada do controlador, permitindo que se escolha um
valor conveniente para h.
+h
-h
FIGURA 2.8 ENSAIO EM MALHA FECHADA COM REL.
O perodo da oscilao do sinal de sada y(t) o prprio valor de Pcr . A amplitude a
dessa oscilao influencia o valor de Kcr , conforme equao (2.5).
A partir dos valores de Kcr e Pcr , emprega-se os ganhos sugeridos por Ziegler e
Nichols (tabela 2.2),
4 h
Kcr
a
=
( 2.5 )
2.4.3. Mtodo Heurstico de Cohen-Coon
O mtodo Cohen e Coon (1953) uma alternativa ao mtodo proposto por Ziegler e
Nichols (1942). Da mesma forma como o primeiro mtodo de Ziegler e Nichols, o modelo
aproximado da planta considerado uma a funo de transferncia de primeira ordem com
tempo morto (equao 2.3).
A tabela 2.3 apresenta as sintonias proposta por Cohen e Coon (1953) para as leis de
controle P, PI. PD e PID.
TABELA 2.3 SINTONIA PROPOSTA PELO METODO DE COHEN E COON
Kp Ti Td
P
1 1
3 K
| |
+
|
\
0 0
PI
1 0,9 1
12 K
| |
+
|
\
10
3
20
9
+
+
0
PD
1 1,25 1
6 K
| |
+
|
\
0
3
2
3
22
+
PID
1 4 1
3 4 K
| |
+
|
\
6
32
8
13
+
+
4
2
11
+
2.4.4. Mtodo Heurstico da Integral da Funo de Erro
Os mtodos heursticos apresentados nas sees anteriores foram concebidos de forma
a proporcionar uma resposta de malha fechada com um decaimento dos seus picos na razo de
. Esse critrio leva ao grande inconveniente de respostas muito oscilatrias. Como
alternativa a esse critrio, se usam os ndices integrais (SEBORG; EDGAR;
MELLICHAMO, 1989)
( )
2
0
( ) ,
f
t
ISE e t dt =
( 2.6 )
0
( ) ,
f
t
IAE e t dt =
( 2.7 )
0
( ) ,
f
t
ITAE t e t dt =
( 2.8 )
em que, ISE a integral do quadrado do erro, IAE a integral do valor absoluto do erro, e
ITAE a integral do valor absoluto do erro multiplicado pelo tempo. Note-se que o ndice
ITAE penaliza os erros que persistem mesmo com o passar do tempo.
O mtodo heurstico de sintonia de controladores PID baseado nos critrios integrais
da funo do erro so aplicveis a plantas de primeira ordem com tempo morto. Segundo
Lopez, et al., (1967, apud GARCIA, 2003), as expresses das equaes 2.9 a 2.11 definem a
sintonia PID recomendada para o problema regulador, ou seja, para variaes na carga. As
constantes A, B, C, D, E, e F esto listadas na tabela 2.4 (GARCIA, 2003).
.
B
K Kp A
| |
=
|
\
,
( 2.9 )
D
C
Ti
|
\
|
=
,
( 2.10 )
F
E
Td
|
\
|
=
.
( 2.11 )
TABELA 2.4 CONSTANTES DO PROBLEMA REGULADOR
A B C D E F
PI ISE 1,305 -0,960 0,492 -0,739
PI IAE 0,984 -0,986 0,608 -0,707
PI ITAE 0,859 -0,977 0,674 -0,680
PID ISE 1,495 -0,945 1,101 -0,771 0,560 1,006
PID IAE 1,435 -0,921 0,878 -0,749 0,482 1,137
PID ITAE 1,357 -0,947 0,842 -0,738 0,381 0,995
Segundo Rovira, et al., (1969, apud GARCIA, 2003), as expresses das 2.12 a 2.14
definem a sintonia PID recomendada para o problema servo, ou seja, para variaes do sinal
de referncia. As constantes A, B, C, D, E, e F esto listadas na tabela 2.5. (GARCIA, 2003)
.
B
K Kp A
| |
=
|
\
,
( 2.12 )
D
D C
Ti
|
\
|
+ =
,
( 2.13 )
F
E
Td
|
\
|
=
,
( 2.14 )
TABELA 2.5 CONSTANTES DO PROBLEMA SERVO
A B C D E F
PI IAE 0,758 -0,861 1,02 -0,323
PI ITAE 0,586 -0,916 1,03 -0,165
PID IAE 1,086 -0,869 0,74 -0,13 0,348 0,914
PID ITAE 0,965 -0,85 0,796 -0,1465 0,308 0,929
Em seu artigo, Tavakoli e Tavakoli (2003 apud CAMPOS e TEIXEIRA, 2006)
executam uma anlise dimensional para determinar uma sintonia tima para controladores
PID baseada nos critrios IAE e ITAE para o problema servo de sistemas de primeira ordem
com tempo morto. A tabela 2.6 apresenta os parmetros sugeridos.
TABELA 2.6 SINTONIA DE TAVAKOLI E TAVAKOLI
Fator Adimensional IAE ITAE
= K Kp
2 , 0
1
+ |
\
|
1 , 0
8 , 0
+ |
\
|
Ti
=
08 , 0
2 , 1 3 , 0
+ |
\
|
+
|
\
|
\
|
+
1
3 , 0
Td
=
|
\
|
90
1
04 , 0
06 , 0
+ |
\
|
2.4.5. Mtodo Analtico da Sntese Direta
Neste trabalho considera-se que um mtodo classificado como analtico se ele requer
um modelo mais rigoroso da planta que aquele obtido por poucos parmetros de um ensaio
preliminar, como o caso dos mtodos aqui denominados de heursticos.
O mtodo da Sntese Direta busca definir a funo de transferncia de malha fechada
para impor a resposta de malha fechada.
Ao especificar a resposta desejada, necessrio verificar se o controlador resultante
realizvel, ou seja, se no possui um tempo morto positivo (no causal) ou termos de
diferenciao pura com mais zeros que plos na funo de transferncia.
A partir dos modelos padres de plantas representadas na tabela 2.7, obtm-se a
sintonia dos controladores. No caso, as plantas de primeira ordem, e primeira ordem com
tempo morto, admitem apenas sintonia PI. Plantas de segunda ordem, e segunda ordem com
tempo morto, admitem apenas sintonia PID.
TABELA 2.7 SINTONIA PID DA SNTESE DIRETA
Parmetros do controlador PID
Modelo da Planta
Kp Ti Td
( )
1
K
G s
s
=
+
K
c
0
( )
1
s
Ke
G s
s
=
+
( ) K
c
+
0
( )
(1 )(1 )
1 2
K
G s
s s
=
+ +
1 2
K
c
+
1 2
+
*
1 2
1 2
+
( )
(1 )(1 )
1 2
s
Ke
G s
s s
=
+ +
1 2
( ) K
c
+
+
1 2
+
*
1 2
1 2
+
2.4.6. Outros Mtodos de Projeto PID
Embora com aplicao industrial menos freqente, existe uma enorme quantidade de
tcnicas de projeto PID sugeridas na literatura. A seguir, apresenta-se uma parte desse
panorama.
Em seu artigo, Hemerly (1991) prope uma tcnica do projeto de controladores PID
digitais. Essa tcnica envolve a otimizao numrica do desvio da sada do processo em
relao sada de um modelo de referncia.
Na classe dos mtodos de sintonia analticos, as tcnicas apresentadas em grande parte
dos artigos so fundamentadas na representao de estados e na teoria de controle timo. Em
seu artigo, Athans (1971) mostra como usar a teoria de controle timo linear de sistemas
reguladores para resolver um problema servo aplicado a uma planta de primeira ordem,
resultando numa estrutura de controlador do tipo PI. Essa planta deve ser aumentada por um
integrador, para que o sistema de malha fechada consiga acompanhar sinais de referncia do
tipo degrau aplicado na entrada. Uma soluo explcita fornecida para resolver o problema
com um funcional quadrtico que envolve uma ponderao entre o sinal do erro e a varivel
manipulada. Uma restrio do procedimento proposto em Athans (1971) ser aplicvel
somente aos sistemas do tipo nica entrada e nica sada (SISO) e a sistemas de 1 ordem ou
predominantes.
Esse problema foi resolvido, em parte, por Mukhopadhyaya (1978) que mostra ser
possvel determinar uma estrutura de controlador do tipo PID multivarivel, equivalente lei
de controle do tipo realimentao de estado. O problema com esse mtodo que a
equivalncia s biunvoca quando o nmero de sada da planta igual metade do nmero
de estados. Isso um tanto restritivo, porm so propostas solues aproximadas baseadas em
problemas de mnimos quadrados. Outra limitao do mtodo proposto em Mukhopadhyaya
(1978) que aspectos de robustez no so tratados.
O problema de robustez foi incorporado por Leonardi e Cruz (1993) e uma aplicao
SISO foi apresentada em Maya e Leonardi (1994). Antes do seu mapeamento numa estrutura
PID, a lei de controle admitida do tipo realimentao completa de estados, permitindo que
qualquer propriedade conferida pela realimentao de estados, tal como a minimizao da
norma H
2
ou H
, venha a ser tambm obtida aproximadamente na soluo PID.
3. MTODO DO LUGAR GEOMTRICO DAS RAZES
INCREMENTAL
Este captulo aborda o mtodo do lugar das razes, suas regras de construo,
destacando a propriedade incremental, um dos principais objetos de estudo deste trabalho.
Prope-se aqui uma estratgia de controle de malha fechada e o seu procedimento de projeto
baseado na propriedade incremental do lugar das razes e na tcnica de cancelamento de plos
e zeros. Mostra-se que esse controlador, aqui denominado de LGRI, tem uma estrutura
equivalente a um controlador PID de dois graus de liberdade, fazendo com que o
acompanhamento do sinal de referncia e a rejeio de distrbios, sejam feitos com dinmicas
distintas.
3.1 Mtodo do Lugar das Razes
Walter R. Evans (1948), teve sua principal contribuio disseminando o mtodo Evans
do lugar das razes e, aps dois anos, em 1950, apresentou o mtodo do Lugar Geomtrico
das Razes (LGR), que permite determinar os plos da funo de transferncia em malha-
fechada, a partir dos plos e zeros da funo de transferncia de malha aberta, em funo
do ganho do sistema (EVANS, 1950). O LGR tornou-se uma ferramenta auxiliar ao
desenvolvimento de projeto de sistemas de controle.
Com o mtodo do lugar das razes, possvel saber como os plos e zeros em malha
aberta devem ser modificados, para que a resposta atenda a certas especificaes de
desempenho de um sistema. Mas esse apenas um, entre muitos outros, dos recursos
oferecidos na aplicao do mtodo.
Para apresentao dos fundamentos do LGR, considere o diagrama de blocos de um
sistema de controle em malha fechada, representado na figura 3.1.
FIGURA 3.1 SISTEMA DE CONTROLE DE MALHA FECHADA
A funo de transferncia de malha fechada dada por
( ) . ( )
( ) 1 . ( ) ( )
Y s K G s
R s K G s H s
=
+
.
( 3.1 )
A partir dela, imediato perceber que a equao
1 . ( ) ( ) 0 K G s H s + = , ( 3.2 )
permite determinar os plos de malha fechada, pois o numerador da funo
1 . ( ) ( ) K G s H s + tambm denominador da funo de transferncia de malha fechada.
A equao 3.2 se desdobra nas equaes 3.3 e 3.4 que definem a condio de mdulo,
e de fase, respectivamente, bases para a construo do LGR, pois os valores de s que
satisfazem as condies de mdulo e fase so as razes da equao caracterstica (equao 3.2)
(OGATA 1997).
1
( ) ( )
K
G s H s
= ( 3.3 )
( ) ( ) 180 360 G s H s K = para 0,1, 2,... K =
( 3.4 )
3.1.1. Resumo das Regras de Construo do LGR
O lugar das razes uma representao grfica das localizaes dos plos da funo
de transferncia de malha fechada de um sistema de controle, em funo de algum
parmetro da funo de transferncia de malha aberta. A localizao dos plos de malha
fechada est atrelada s especificaes do sistema, como por exemplo, porcentagem de
sobressinal, tempo de pico, tempo de acomodao, etc.
As principais regras obtidas a partir das condies de mdulo e fase, so
(NISE, 2002):
O nmero de ramos do LGR igual ao nmero de plos de malha aberta
(MA).
O LGR simtrico em relao ao eixo real.
No eixo real, para 0 > K , o LGR existe esquerda de um nmero mpar de
plos e/ou zeros de malha aberta sobre o eixo real.
LGR se inicia com 0 = K nos plos de malha aberta e termina com K
nos zeros de malha aberta. Quando ( ) ( ) G s H s tem nmero m de zeros menor
que o nmero n de plos, ento m n ramos do LGR vo para o infinito
quando K .
Os ramos do LGR que vo para o infinito, o fazem segundo assntotas que so
semi-retas de origem sobre o eixo real na posio
( ) ( )
m n
MA zeros MA plos
a
= ( 3.5 )
e com um ngulo
(2 1)180
( )
a
K
K
n m
+
=
, 0, 1, 2, 4, K = K ( 3.6 )
em relao horizontal.
Os pontos de sada e de chegada ao eixo real do LGR ocorrem quando o ganho
, respectivamente, mximo local e mnimo local.
O ngulo de partida de plos e de chegada em zeros determinado pela
condio de fase em um ponto do LGR prximo desse plo ou zero.
3.2. Propriedade Incremental do Mtodo do Lugar das Razes
A propriedade incremental do LGR til em vrias anlises. Em seu artigo, Monteiro
e Cruz (2008) apresentam uma discusso sobre o LGR utilizando a propriedade incremental a
partir de exemplos diversos para responder questes sobre formas incomuns do grfico de
Evans do lugar das razes.
Em seu artigo Gomes, Leonardi e Cruz (2006) propem a aplicao da propriedade
incremental do LGR no projeto de controladores PID, que o objetivo deste trabalho.
Para apresentar a propriedade incremental, considere o diagrama de blocos da
figura 3.2, em que ) ( ) ( s H s G representa a funo de transferncia da malha aberta e K , um
incremento do ganho K. Note-se que para a determinao das razes de 1 . ( ) ( ) 0 K G s H s + =
e, portanto, o traado do LGR, no necessrio considerar a entrada de referncia.
FIGURA 3.2 ANLISE DO LGR INCREMENTAL.
O diagrama de blocos da figura 3.2 equivalente ao diagrama de blocos da figura 3.3,
sendo este mais adequado para se evidenciar a propriedade incremental.
K
K
FIGURA 3.3 DIAGRAMA EQUIVALENTE AO DO LGRI.
A equao caracterstica da malha interna dada por 1 . ( ) ( ) 0 K G s H s + = . Logo, o
seu LGR pode ser determinado normalmente em funo de K. Os plos de malha fechada
dessa malha interna, para um dado K , com seus zeros de malha aberta, determinam a funo
de transferncia (de malha aberta) para a construo do LGR da malha externa em funo de
K . Assim, o ganho K aloca os plos de malha fechada, da malha externa, em uma
determinada posio do plano complexo que tambm lugar das razes da malha interna.
Como ilustrao considere a funo de transferncia
1
( ) ( )
( 3)( 7)
G s H s
s s
=
+ +
.
( 3.7 )
A figura 3.4 mostra a localizao dos plos em malha aberta nas posies -3 e -7 e o
traado do LGR em funo do ganho K (linha contnua).
-7 -3
-5+2j
-5-2j
Im
Re
FIGURA 3.4 LUGAR GEOMTRICO DAS RAZES EM FUNO DO GANHO K.
Ajustando-se, por exemplo, o ganho para 8 = K , os plos de malha fechada se
localizam na posio j 2 5 . A figura 3.5 ilustra o novo LGR, cujos plos de malha aberta
so j 2 5 . Note que o LGR em funo K a continuao do LGR em funo de K, para
8 > K .
-7 -3
-5+2j
-5-2j
Im
Re
-5
3.3 O Projeto de Controladores PID Baseado no LGRI
Os requisitos impostos aos sistemas de controle so denominados de especificaes de
desempenho e devem ser estabelecidas antes de se iniciar um projeto (OGATA, 2003). Essas
especificaes podem ser dadas em funo da resposta transitria como, por exemplo, o
mximo sobressinal e o tempo de acomodao. As especificaes tambm podem ser em
relao ao regime estacionrio, como a eliminao dos erros estticos.
O mtodo heurstico de projeto de controladores PID, baseado na propriedade
incremental do LGR, conduzido em duas etapas.
Deve-se realizar um ensaio preliminar em malha fechada com um controlador
proporcional, cujo ganho aqui denominado Kpre, colocando-se um sinal de entrada do tipo
FIGURA 3.5 LUGAR DAS RAIZES EM FUNO DE K.
degrau. Note-se que necessrio que a planta seja estabilizvel com um controlador
proporcional para que o mtodo possa ser aplicado.
A escolha de valor do ganho Kpre arbitrria no sentido de que tanto respostas
superamortecidas como subamortecidas so vlidas para o mtodo. Entretanto, como ser
detalhado adiante, a dinmica de rejeio de distrbios funo desse ganho. Assim, para
uma rejeio mais rpida dos distrbios, recomenda-se que o ganho Kpre seja escolhido de
forma a conferir uma resposta do tipo subamortecida.
A partir de informaes coletadas do grfico da resposta, pode-se estimar um modelo
aproximado da planta. O prximo passo projetar um controlador por cancelamento de plos
e zeros. aqui que se faz a relao com a propriedade incremental do LGR, pois os zeros do
controlador so alocados sobre os plos de malha fechada do ensaio preliminar. Por causa da
propriedade incremental, no necessrio se conhecer os plos e zeros da Planta
propriamente dita, j que para um dado Kpre, os plos de malha fechada podem ser
considerados como os plos de malha aberta para uma nova realimentao.
Alm do cancelamento dos plos pelos zeros do controlador, acrescenta-se um plo na
origem para conferir boas propriedades no regime estacionrio da resposta. O ganho Klocus
do compensador ajusta a velocidade de resposta do sistema.
3.3.1. Ensaio Preliminar
O ensaio preliminar serve para se determinar a posio dos plos dominantes do
sistema em malha fechada. Como o LGR incremental, no se faz necessrio saber onde
esto os plos de malha aberta. Esse o ponto-chave da tcnica proposta neste trabalho.
O ensaio preliminar conduzido com um controlador proporcional e um sinal tipo
degrau aplicado na entrada de referncia. A figura 3.6 mostra a estrutura usada no ensaio
preliminar.
Kpre
-
G(s)
+
v(s) y(s)
FIGURA 3.6 ENSAIO PRELIMINAR.
No diagrama de blocos do ensaio preliminar, identifica-se a planta G(s) e ganho Kpre
do controlador proporcional. Para que o procedimento de projeto possa ser aplicado, o sistema
da figura 3.6 deve ser estabilizvel. Dependendo da resposta obtida com o valor escolhido de
Kpre, aplica-se um dos procedimentos descritos nas sees seguintes.
3.3.1.1. Sistemas Subamortecidos
Aps realizar o ensaio preliminar, se a resposta do sistema resultar sub-amortecida,
deve-se obter a funo de transferncia aproximada para a malha fechada
( )
( )
( )
Y s
F s
V s
=
( 3.9 )
Um procedimento recomendado para tanto , a partir dos dados do ensaio preliminar,
determinar o valor do instante de pico Tp ;
determinar a porcentagem de ultrapassagem (sobressinal) %UP;
calcular o ganho de baixas frequncias Kg do sistema em malha fechada;
calcular a posio
d d
j dos plos dominantes do sistema em malha fechada.
A equao 3.10 apresenta a funo de transferncia associada a esses valores.
2 2
( )
( )
( )( )
d d
F s Kg
s j s j
d d d d
+
=
+ + +
( 3.10 )
As frmulas que relacionam os valores notveis da curva de resposta com a posio
dos plos dominantes de segunda ordem, segundo Ogata (1997), so aquelas apresentadas nas
equaes 3.11 e 3.12.
T
p
d
=
( 3.11 )
% 100
d
d
UP e
| |
|
\
=
.
( 3.12 )
O ganho
Kg
pode ser determinado a partir da variao v aplicada ao sinal de
referncia e da variao y obtida no sinal de sada ) (t y .
3.3.1.2. Sistemas Superamortecidos
Se o sinal de sada no ensaio preliminar resultar superamortecido, pode-se determinar
posio
d
do plo real dominante por meio da constante de tempo observada na resposta.
O ganho
Kg
do sistema pode ser determinado a partir da variao v aplicada ao sinal de
referncia e da variao y obtida no sinal de sada ) (t y .
A funo de transferncia de malha fechada associada a esses valores dada por
( )
1
( ) .
1
F s Kg
s
=
+
( 3.13 )
Para se caracterizar um sistema de primeira ordem, pode-se usar a expresso temporal
da resposta ao degrau
( ) . 1
t
y t v Kg e
| |
=
|
\
0 t
,
( 3.14 )
Para se verificar experimentalmente se o sistema apresenta resposta superamortecida e
com um plo real dominante, pode-se aplicar o seguinte procedimento prtico: (i) registrar o
instante de tempo
1
t t = para o qual a sada 63% do valor final; (ii) verificar se para 86% do
valor final, o valor do tempo
2
t t = aproximadamente
1
2t , e (iii) verificar se para 95% do
valor final, o valor do tempo
3
t t = aproximadamente
1
3t . Se essas condies forem
satisfeitas, o sistema pode ser considerado superamortecido e com um plo real dominante.
3.3.1.3. Sistemas com Amortecimento Crtico
Se o sinal de sada no ensaio preliminar resultar criticamente amortecido, pode-se
determinar posio
d
dos plos duplos reais e dominante por meio da constante de tempo
observada na resposta. O ganho
Kg
do sistema pode ser determinado a partir da variao v
aplicada ao sinal de referncia e da variao y obtida no sinal de sada ) (t y .
( )
( )
2
1
( )
2
1
F s Kg
s
=
+
.
( 3.15 )
Para se caracterizar um sistema com amortecimento crtico, pode-se usar a expresso
no tempo da resposta ao degrau
1
( ) . 1
t t
y t v Kg e te
| |
=
|
\
0 t
.
( 3.16 )
Para se verificar experimentalmente se o sistema apresenta resposta criticamente
amortecida pode-se aplicar um procedimento prtico, comparando a resposta ao degrau com
alguns valores notveis da equao 3.16. A tabela 3.1 apresenta alguns valores para esse teste.
Por exemplo, quando a sada 26% do valor final, obtm-se
1
t . Se para 60% do valor final
1 2
2t t , para 80% do valor final
1 3
3t t e para 90% do valor final
1 4
4t t , ento o sistema
aproximadamente criticamente amortecido.
TABELA 3.2 RESPOSTA DO SISTEMA COM AMORTECIMENTO CRTICO
y(t)
t = t
1
= 0,26 y()
t
2
= 2 t
1
0,60 y()
t
3
= 3 t
1
0,80 y()
t
4
= 4 t
1
0,90 y()
3.3.2. Cancelamento de Plos e Zeros
A tcnica de cancelamento de plos e zeros usada aqui para cancelar os plos
dominantes da malha fechada do ensaio preliminar com os zeros do controlador LGRI. Alm
dos dois zeros, o controlador proposto possui ainda um plo na origem e um ganho
denominado Klocus. A figura 3.7 apresenta a estrutura completa do sistema de controle
proposto.
FIGURA 3.7 SISTEMA DE CONTROLE PROPOSTO.
O ganho Klocus responsvel pelo ajuste da velocidade de resposta em malha
fechada, pois seu valor afeta diretamente a constante de tempo de malha fechada, como ser
detalhado adiante.
A tcnica de cancelamento de plos pode ser aplicada a qualquer um dos trs tipos de
sistemas analisados: subamortecido, superamortecido e criticamente amortecido. No caso de
sistema subamortecido, o cancelamento realizado por meio da funo
( )( )
( )
s j s j
d d d d
A s
s
+ + +
=
( 3.17 )
No caso de sistema superamortecido, o controlador cancela o plo dominante com
( ) 1
( ) ,
s
A s
s
+
=
( 3.18 )
enquanto que, se o sistema resulta criticamente amortecido, o controlador cancela os dois
plos dominantes por meio da funo.
( ) 1 .( 1/ )
( )
s s
A s
s
+ +
=
( 3.19 )
Na seo seguinte, mostra-se que o controlador da figura 3.7 equivalente a um PID com
dois graus de liberdade, nos casos das equaes 3.17 e 3.19. Para o caso da equao 3.18, o
compensador equivalente a um controlador PI.
3.4 O Controlador PID de Dois Graus de Liberdade (TDOF)
Na rea dos sistemas de controle de processos, sabe-se que os esquemas bsicos de
PID e PID modificados provaram sua utilidade conferindo um controle satisfatrio, embora
em muitas situaes eles no permitam elevados desempenhos. Como a maioria dos
controladores PID ajustada em campo, diferentes tipos de regras de sintonia vm sendo
propostas na literatura. Com a utilizao das regras, ajustes finos nos controladores podem ser
realizados em campo. Estruturas PID modificadas, como o modelo I-PD e o controlador de
dois graus de liberdade, esto em uso na indstria. A utilidade de controladores PID est na
sua aplicabilidade geral maioria dos sistemas de controle. Em particular, quando o modelo
da planta desconhecido, mtodos de projeto analtico no podem ser utilizados. Em casos
prticos, pode existir um requisito relativo resposta da entrada de distrbio e outro requisito
relativo resposta da entrada de referncia, conflitantes entre si. Logo no podem ser
satisfeitos no caso de um grau de liberdade. Aumentando os graus de liberdade, somos
capazes de atender a mais de um requisito. Nesses esquemas de controle temos um
controlador no ramo direto e outro controlador no ramo de realimentao (OGATA, 2003).
3.4.1. Estrutura do Controlador TDOF
O controlador LGRI (figura 3.7), com a funo de transferncia A(s) dada por umas
das equaes de 3.17 a 3.19, equivalente a estrutura de controle de dois graus de liberdade
com controladores PID mostrada na figura 3.10. Uma vez que o problema de rejeio de
distrbios questo fundamental no problema com dois graus de liberdade, a perturbao
D(s) foi explicitada nesse diagrama.
FIGURA 3.8 ESTRUTURA TDOF COM CONTROLADORES PID
A funo de transferncia dos controladores PID dada por
2
1 1 1
1( )
Kd s Kp s Ki
PID s
s
+ +
=
( 3.20 )
e
2
2 2 2
2( )
Kd s Kp s Ki
PID s
s
+ +
=
( 3.21 )
3.4.2. Lei de Controle do Controlador TDOF
Embora a lei de controle de dois graus de liberdade possa ser facilmente obtida para
qualquer um dos casos das equaes de 3.17 a 3.19, por ser considerado o mais relevante,
somente o caso subamortecido foi detalhado nesta seo e nas seguintes.
Para essa condio, a lei de controle de dois graus de liberdade resulta
( )
( ) ( )
2 2 2
2
( ) . ( )
2 2 2
2 1
. ( ) ,
s s
d d d
u s Kpre Klocus r s
s
s Klocus s
d d d
Kpre Klocus y s
s
(
+ + +
(
=
(
(
(
+ + + +
(
(
(
( 3.22 )
ou seja, com os ganhos dos controladores PID1(s) e PID2(s) dados pelos valores da tabela 3.2.
TABELA 3.2 SINTONIA PID
PID1 PID2
Kp ( ) . 2 Kpre Klocus
d
( ) . 2 1 KpreKlocus k
d locus
+
Ki
( )
2 2
. Kpre Klocus
d d
+
( )
2 2
. Kpre Klocus
d d
+
Kd . Kpre Klocus
. Kpre Klocus
3.4.3. PID Real
Para limitar o ganho elevado das altas freqncias causado pela ao derivativa,
comum adiciona-se um filtro de primeira ordem na parcela derivativa da lei de controle PID
(equao 3.23). O controlador PID com essa filtragem comumente denominado de PID-
Real.
( )
1
R
Ki s
PID s Kp Kd
s fs
= + +
+
( 3.23 )
Se o controle com dois graus de liberdade for implementado com controladores PID-
Reais, a funo de transferncia A(s) deve incorporar esse plo da seguinte forma, ou seja,
( )( )
( ) ,
( 1)
s j s j
d d d d
A s
s fs
+ + +
=
+
( 3.24 )
e a lei de controle resulta
( )
( ) ( )
2 2 2
2
( ) . ( )
( 1)
2 2 2
2 1
. ( ) ,
( 1)
s s
d d d
u s Kpre Klocus r s
s fs
s Klocus s
d d d
Kpre Klocus y s
s fs
(
+ + +
(
=
(
+
(
(
+ + + +
(
(
+
(
( 3.25 )
3.4.4. Dinmica da rejeio ao distrbio
A estrutura de controlador de dois graus de liberdade da figura 3.8 tambm
equivalente ao diagrama de blocos da figura 3.9, em que F
1
(s) a funo de transferncia do
PID
1
e F
2
(s) , do PID
2
.
F
2
(s)
F
1
(s)
F
2
(s)
G(s)
-
Y(s)
R(s) U(s) E(s)
FIGURA 3.9 CONTROLE COM PR FILTRO.
Devido ao cancelamento de plos proposto no projeto, a funo de transferncia de
malha fechada resulta em um sistema de primeira ordem
( ) 1
( )
( ) 1
Y s
T s
R s s
= =
+
,
(3.26 )
sendo que a constante de tempo dada por
( )
2 2
1
.
d d
Klocus Kg
=
+
,
( 3.27
Como o valor do ganho Klocus arbitrrio, a velocidade de resposta da sada tambm
arbitrria. Entretanto, a funo de transferncia de malha fechada, sem o pr-filtro
) ( ) (
2 1
s F s F , resulta em uma dinmica mais complexa, conforme equao 3.27.
Como a compensao da perturbao D(s) que se soma a U(s), feita por essa mesma
malha, esse processo de rejeio ser realizado com a dinmica de 3 ordem
2
1 1 1
( ) 1
( )
( ) 1
D
d p i
Y s s
T s
D s k s k s k s
| |
= =
|
|
+ + +
\
. ( 3.28 )
2
2 2 2
2
1 1 1
( ) 1
( ) 1
d p i
d p i
k s k s k
Y s
V s k s k s k s
| | + +
=
|
|
+ + +
\
. ( 3.27 )
A equao 3.29 mostra que a rejeio s perturbaes possui uma dinmica igual do
acompanhamento do sinal de referncia e outra igual dinmica da malha usada no ensaio
preliminar.
2 2 2
( ) 1 1
( )
( ) 2 ( ) 1
D
d d d
Y s s
T s
D s KlocusKpre s s s
| |
= =
|
+ + + +
\
. ( 3.29 )
Admitindo-se que a dinmica de primeira ordem escolhida seja suficientemente
rpida, a dinmica preponderante de ) (s T
D
ser a de segunda ordem. Nesse cenrio, se o
objetivo for rejeio rpida, mais rpida deve ser a resposta utilizada no ensaio preliminar, o
que tipicamente significa maiores valores de Kpre .
Conclui-se que o controlador que est associado ao acompanhamento do sinal de
referncia conduz a desempenhos prximos do comportamento de sistemas de primeira
ordem, enquanto o outro controlador, que est associado rejeio de distrbio, tem dinmica
mais complexa.
4. ANLISE DE DESEMPENHO
Neste captulo analisa-se o compensador LGRI no controle de uma srie de modelos
de plantas que so comuns nas aplicaes prticas da rea de controle de processos. Seu
desempenho comparado com o de controladores PID, sintonizados por tcnicas clssicas. A
comparao feita por meio das caractersticas notveis da resposta transitria do sinal de
sada e do sinal de controle.
4.1. Desempenho via Simulao
O esquema da figura 4.1 ilustra o compensador LGRI aplicado ao controle de nvel de
um tanque. Nesta seo sero realizadas simulaes de sistemas de controle com a mesma
estrutura daquele da figura 4.1, porm com outras plantas comuns nos processos produtivos, a
exemplo dos trocadores de calor, sistemas trmicos, caldeiras, etc.
LT
Kpre
Klocus
ATUADOR
A(s)
Y ( s )
R ( s )
M ( s )
+
-
+
-
Tanque
FIGURA 4.1 ESTRUTURA DO SISTEMA DE CONTROLE.
4.1.1. Sistema Marginalmente Estvel
Considere a funo
100
( )
( 10)( 50)
G s
s s s
=
+ +
.
( 4.1 )
Essa ( ) G s uma funo marginalmente estvel e poderia, por exemplo, representar
um servomecanismo cuja sada a posio e os valores -10 e -50, os plos mecnico e
eltrico, respectivamente. Tambm poderamos imaginar que esta funo de transferncia
um modelo de um vaso de presso, onde os plos fora da origem estariam, por exemplo,
associados dinmica do atuador.
Dentre os mtodos clssicos de sintonia de controladores PID apresentados na reviso
bibliogrfica deste trabalho, a maioria deles no pode ser aplicada a este caso, pois a planta
no estvel. Uma vez que o LGR associado, intercepta o eixo imaginrio, o segundo mtodo
de Ziegler e Nichols pode ser aplicado. Tambm possvel aplicar o mtodo do rel, pois seu
o diagrama de Nyquist intercepta o eixo real negativo
1
. Note que, se um dos plos que est
fora da origem no existisse, o diagrama de Nyquist interceptaria do eixo real negativo
somente na origem e a amplitude das oscilaes auto-sustentadas seria nula. Por questes
meramente didticas, optou-se por realizar as comparaes de desempenho do controlador
LGRI com o PID sintonizado pelo mtodo do rel.
Uma vez que o mtodo LGRI e o do rel tm objetivos diferentes, necessrio
estabelecer uma base para as comparaes. Decidiu-se ento impor um mesmo esforo de
controle para que as caractersticas da resposta transitria pudessem ser confrontadas.
4.1.1.1. Projeto PID pelo Mtodo do Rel.
Para um valor de saturao 10 h = , escolhido arbitrariamente, as oscilaes do ciclo
limite exibem uma amplitude 0,089 a = e um perodo 0,29s Pcr = . Com esses valores,
obtm-se os ganhos sugeridos por Ziegler e Nichols e a funo de transferncia PID resulta
1
( ) 85, 64 1 0, 036
0,145
C s s
s
| |
= + +
|
\
. ( 4.2 )
4.1.1.2. Projeto LRGI.
O controlador LGRI possui dois parmetros de projeto, Kpre e Klocus . O primeiro
deles usado durante o ensaio preliminar e tambm influencia a dinmica de rejeio de
perturbaes. O segundo parmetro influencia a constante de tempo de acompanhamento do
sinal de referncia.
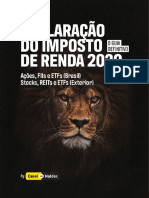
O valor 100 Kpre = foi escolhido por meio de tentativas de modo a se obter uma
resposta do tipo sub-amortecida no ensaio preliminar. A figura 4.2 apresenta o grfico do
7575
1
Condio para existncia de um ciclo limite.
sinal de sada ( ) y t para um sinal de referncia ( ) v t do tipo degrau de amplitude unitria. Do
grfico de ( ) y t , obtm-se o instante de pico 0, 253 Tp s = e o sobressinal 48,75 % Mp = . O
ganho de regime permanente 1 Kg = determinado dividindo-se o valor de regime de sada
pela amplitude do degrau de referncia aplicado. Com base nessas informaes, a funo de
transferncia estimada resulta
2
162,2
( )
s + 5,68 s + 162,2
F s =
( 4.3 )
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.5
1
1.5
Ensaio Preliminar
y
(
t
)
Tempo (s)
FIGURA 4.2 ENSAIO PRELIMINAR.
O valor 0, 038 Klocus = foi escolhido por meio de tentativas de modo que o esforo
de controle obtido com o controlador LGRI fosse igual ao esforo de controle obtido com o
PID projetado pelo mtodo do rel. Com os valores Kpre , Klocus e com as informaes do
ensaio preliminar determinam-se os controladores
2
3, 8 21, 58 616, 45
1( )
s s
PID s
s
+ +
= ( 4.4 )
e
2
3, 8 121, 58 616, 45
2( )
s s
PID s
s
+ +
= ( 4.5 )
4.1.1.3. Comparativo
Os grficos da figura 4.3 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de referncia tipo degrau unitrio no instante 0,2 s , utilizando-se o controlador
LGRI e o controlador PID sintonizado pela tcnica do rel. Como impusemos que os valores
mximos do controle fossem iguais, as demais caractersticas da resposta podem ser
comparadas numa mesma base.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.5
1
1.5
2
Resposta a uma Referncia em Degrau
y
(
t
)
Tempo(s)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-100
0
100
200
300
400
500
Controle
m
(
t
)
Tempo (s)
LGRI
Rel
LGRI
Rel
FIGURA 4.3 RESPOSTA A VARIAO DE REFERENCIA.
Como esperado, o sinal de resposta da planta com controlador LGRI apresenta uma
resposta que pode ser aproximada a de um sistema de primeira ordem, cuja constante de
tempo de, aproximadamente, 0,16 s.
No caso deste exemplo, a resposta do controlador LGRI superior em quase todas as
caractersticas da resposta transitria, ou seja, no sobressinal e no tempo de acomodao. O
mtodo do rel foi superior apenas em relao ao tempo de subida.
Os grficos da figura 4.4 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de perturbao tipo degrau de amplitude 10, aplicado no instante 0,2 s.
Como o valor de Kpre no foi escolhido de forma a fixar a dinmica da rejeio de
perturbao e sim apenas para conferir uma resposta adequada coleta de dados do ensaio
preliminar, o desempenho da rejeio de perturbao poderia ser bem diferente daquele
observado para uma variao do sinal de referncia.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.05
0
0.05
0.1
0.15
Resposta a uma Perturbao em Degrau
y
(
t
)
Tempo (s)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-20
-15
-10
-5
0
Controle
m
(
t
)
Tempo (s)
LGRI
Rel
LGRI
Rel
FIGURA 4.4 RESPOSTA AO DISTRBIO.
Dos grficos da figura 4.4 pode-se constatar que tanto a mxima excurso da sada
como o tempo de restabelecimento do valor de regime, so inferiores quando o sistema
controlado pelo LGRI, alm de exibir um menor esforo de controle.
As tabelas 4.1.a e 4.1.b resumem os comparativos. Para uma variao do sinal de
referncia, comparou-se o esforo de controle (m(t) mximo), o tempo de acomodao Ts da
resposta y(t) e seu sobressinal. Na rejeio de perturbaes, compararam-se as amplitudes
mximas presentes no sinal de controle e na sada, necessrias para rejeitar o distrbio.
m(t) mximo Ts Sobressinal (%)
LGRI 400 0,7s 0
Rel 400 2 s 66
|m(t)| mximo y(t) mximo
LGRI 16,2 0,087
Rel 16,6 0.107
4.1.2. Sistema Benchmarking
Em seu artigo sobre sintonia tima de controladores digitais, Hemerly (1991)
apresenta a funo de transferncia
3 2
4, 23
( )
2,14 9, 28 4, 23
G s
s s s
=
+ + +
, ( 4.6 )
e argumenta que ela representa uma planta de difcil sintonia pelos mtodos clssicos. Pelo
carter desafiador, o projeto LGRI conduzido para esta planta e seu desempenho comparado
com o mtodo de Ziegler e Nichols (1942).
4.1.2.1. Projeto PID pelo Segundo Mtodo de Ziegler e Nichols
Ajustando o ganho do controlador proporcional, obtm-se o limiar de estabilidade para
3,7 Kcr = , com um perodo crtico 2,05s Pcr = . Com esses valores, obtm-se os ganhos
sugeridos por Ziegler e Nichols e a funo de transferncia PID resulta
1
( ) 2, 2 1 0, 257
1, 028
C s s
s
| |
= + +
|
\
.
( 4.7 )
Tabela 4.1.a
DADOS COLETADOS REFERNCIA.
Tabela 4.1.b
DADOS COLETADOS DISTRBIO.
4.1.2.2. Projeto LRGI
O valor 1, 5 Kpre = foi escolhido por meio de tentativas de modo a se obter uma
resposta do tipo subamortecida no ensaio preliminar e de forma que o primeiro dos picos
fosse o maior deles, tal como acorre para os sistemas de segunda ordem sub-amortecidos. A
figura 4.5 apresenta o grfico do sinal de sada ( ) y t para um sinal de referncia ( ) v t do tipo
degrau de amplitude unitria. Do grfico de ( ) y t , obtm-se o instante de pico 1, 64 Tp s = e o
sobressinal 11 % Mp = . O ganho de regime permanente 0, 6 Kg = determinado dividindo-se
o valor de regime de sada pela amplitude do degrau de referncia aplicado. Com base nessas
informaes, a funo de transferncia estimada resulta
2
3,28
( )
s + 2,68 s + 5,47
F s =
( 4.8 )
0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Ensaio Preliminar
y
(
t
)
Tempo (s)
FIGURA 4.5 ENSAIO PRELIMINAR.
O valor 0, 38 Klocus = foi escolhido por meio de tentativas de modo que o esforo de
controle obtido com o controlador LGRI fosse igual ao esforo de controle obtido com o PID
projetado pelo segundo mtodo de Ziegler e Nichols. Com os valores Kpre , Klocus e com as
informaes do ensaio preliminar determinam-se os controladores
2
0, 57 1, 53 3,12
1( )
s s
PID s
s
+ +
= ( 4.9 )
e
2
0, 57 3, 03 3,12
2( )
s s
PID s
s
+ +
= ( 4.10 )
4.1.2.3. Comparativo
Os grficos da figura 4.6 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de referncia tipo degrau unitrio no instante 1,0 s , utilizando-se o controlador
LGRI e o controlador PID sintonizado pelo mtodo de Ziegler e Nichols.
Como impusemos que os valores mximos do controle fossem iguais, as demais
caractersticas da resposta podem ser comparadas numa mesma base. No caso deste exemplo,
a resposta do controlador LGRI , de uma maneira geral, inferior resposta obtida com o
controlador PID projetado pelo mtodo de Ziegler e Nichols.
0 5 10 15
0
0.5
1
1.5
Resposta a uma Referncia em Degrau
y
(
t
)
Tempo(s)
0 5 10 15
0
10
20
30
40
50
60
Controle
m
(
t
)
Tempo (s)
LGRI
Z-N
LGRI
Z-N
FIGURA 4.6 RESPOSTA A VARIAO DE REFERENCIA.
Os grficos da figura 4.7 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de perturbao tipo degrau de amplitude 10, aplicado no instante 1,0 s.
Dos grficos pode-se constatar que a mxima excurso da sada ligeiramente menor
com o controlador LGRI. Porm, o esforo de controle necessrio para isso ligeiramente
maior que o esforo obtido como o controlador projetado pelo mtodo de Ziegler e Nichols.
0 5 10 15
-1
0
1
2
3
4
Resposta a uma Perturbao em Degrau
y
(
t
)
Tempo (s)
0 5 10 15
-15
-10
-5
0
Controle
m
(
t
)
Tempo (s)
LGRI
Z-N
LGRI
Z-N
FIGURA 4.7 RESPOSTA AO DISTRBIO.
As tabelas 4.2.a e 4.2.b resumem os comparativos. Para uma variao do sinal de
referncia, comparou-se o esforo de controle (m(t) mximo), o tempo de acomodao Ts da
resposta y(t) e seu sobressinal. Na rejeio de perturbaes, comparam-se as amplitudes
mximas presentes no sinal de controle e na sada, necessrias para rejeitar o distrbio.
Nota-se que, de uma maneira geral, o controlador LGRI apresenta um desempenho
inferior, especialmente com relao ao tempo de acomodao.
m(t) mximo Ts Sobressinal (%)
LGRI 59 13,5 s 15
Z-N 59 7,6 s 17
|m(t)| mximo y(t) mximo
LGRI 13,3 2,7
Z-N 11,7 3,1
4.1.3. Sistema com Resposta Inversa
De acordo com Stephanopoulos (1984), sistemas com resposta inversa so tpicos em
vrios processos, a exemplo do controle de nvel de uma caldeira. Por esse motivo o projeto
LGRI conduzido para a planta
1 1
( )
0, 5 1
G s
s s
=
+
,
( 4.11 )
e seu desempenho comparado com o mtodo de Ziegler e Nichols (1942).
4.1.3.1. Projeto PID pelo Segundo Mtodo de Ziegler e Nichols
Ajustando o ganho do controlador proporcional, obtm-se o limiar de estabilidade para
2,0 Kcr = , com um perodo crtico 3,15s Pcr = . Com esses valores, obtm-se os ganhos
sugeridos por Ziegler e Nichols e a funo de transferncia PID resulta
1
( ) 1, 2 1 0, 395
1, 578
C s s
s
| |
= + +
|
\
. ( 4.12 )
Tabela 4.2.a
DADOS COLETADOS REFERNCIA.
Tabela 4.2.b
DADOS COLETADOS DISTRBIO.
4.1.3.2. Projeto LRGI.
O valor 1, 0 Kpre = foi escolhido por meio de tentativas de modo a se obter uma
resposta do tipo sub-amortecida no ensaio preliminar. A figura 4.8 apresenta o grfico do
sinal de sada ( ) y t para um sinal de referncia ( ) v t do tipo degrau de amplitude unitria. Do
grfico de ( ) y t , obtm-se o instante de pico 2, 7 Tp s = e o sobressinal 36,5 % Mp = . O
ganho de regime permanente 1, 0 Kg = determinado dividindo-se o valor de regime de sada
pela amplitude do degrau de referncia aplicado. Com base nessas informaes, a funo de
transferncia estimada resulta
2
1,48
( )
s + 0,74 s + 1,48
F s =
( 4.13 )
0 5 10 15
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Ensaio Preliminar
y
(
t
)
Tempo (s)
FIGURA 4.8 ENSAIO PRELIMINAR
O valor 0, 48 Klocus = foi escolhido por meio de tentativas de modo que o esforo de
controle obtido com o controlador LGRI fosse igual ao esforo de controle obtido com o PID
projetado pelo mtodo de Ziegler e Nichols. Com os valores Kpre , Klocus e com as
informaes do ensaio preliminar determinam-se os controladores
2
0, 5 0, 37 0, 74
1( )
s s
PID s
s
+ +
= ( 4.14 )
e
2
0, 5 1, 37 0, 74
2( )
s s
PID s
s
+ +
= ( 4.15 )
4.1.3.3. Comparativo
Os grficos da figura 4.9 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de referncia tipo degrau unitrio no instante 1,0 s , utilizando-se o controlador
LGRI e o controlador PID sintonizado pelo mtodo de Ziegler e Nichols.
Como impusemos que os valores mximos do controle fossem iguais, as demais
caractersticas da resposta podem ser comparadas numa mesma base. Observando o tempo de
acomodao e o sobressinal da resposta, conclui-se que o controlador LGRI conferiu um
desempenho superior no acompanhamento do sinal de referncia.
0 5 10 15
-1
-0.5
0
0.5
1
1.5
2
Resposta a uma Referncia em Degrau
y
(
t
)
Tempo(s)
0 5 10 15
-10
0
10
20
30
40
50
Controle
m
(
t
)
Tempo (s)
LGRI
Z-N
LGRI
Z-N
FIGURA 4.9 RESPOSTA A VARIAO DE REFERENCIA.
Os grficos da figura 4.10 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de perturbao tipo degrau de amplitude 10, aplicado no instante 1,0 s.
Dos grficos pode-se constatar que a mxima excurso da sada e o esforo de
controle necessrio so, praticamente, os mesmos.
0 5 10 15
-5
0
5
10
Resposta a uma Perturbao em Degrau
y
(
t
)
Tempo (s)
0 5 10 15
-20
-15
-10
-5
0
5
10
Controle
m
(
t
)
Tempo (s)
LGRI
Z-N
LGRI
Z-N
FIGURA 4.10 RESPOSTA AO DISTRBIO.
As tabelas 4.3.a e 4.3.b resumem os comparativos. Para uma variao do sinal de
referncia, comparou-se o esforo de controle (m(t) mximo), o tempo de acomodao Ts da
resposta y(t) e seu sobressinal. Na rejeio de perturbaes, comparam-se as amplitudes
mximas presentes no sinal de controle e na sada, necessrias para rejeitar o distrbio.
Os dados numricos confirmam a concluso qualitativa prvia de que as respostas so
praticamente equivalentes nas suas caractersticas quanto rejeio do distrbio, mas o LGRI
confere um desempenho superior no acompanhamento do sinal de referncia, pois
praticamente no existe sobressinal e o tempo de acomodao bem menor.
m(t) mximo Ts Sobressinal (%)
LGRI 48 6,7 s 2,5
Z-N 48 10,9 s 62,5
|m(t)| mximo y(t) mximo
LGRI 15,7 8,5
Z-N 16,2 8,9
4.1.4. Sistema Trmico com Tempo Morto
Outro modelo comum associado a plantas reais funo de transferncia de primeira
ordem com tempo morto. Como ilustrao, considere ento o sistema descrito em Ogata
(2003). Trata-se de um sistema trmico no qual o ar quente circula para manter constante a
temperatura de uma cmara. Sua funo de transferncia
3
0, 8
( )
2 1
s
G s e
s
| |
=
|
+
\
.
( 4.16 )
Como essa planta estvel em malha aberta, outros mtodos clssicos de sintonia PID
tambm podem ser utilizados. Por tanto, o desempenho do controlador LGRI testado em
comparao ao desempenho do controlador sintonizado pelo mtodo de Cohen e Coon (1953).
4.1.4.1. Projeto PID pelo Mtodo de Cohen e Coon
Os valores do ganho, da constante de tempo e do tempo morto da planta podem ser
facilmente obtidos por meio de um ensaio em malha aberta, aplicando-se um sinal de entrada
tipo degrau. Com esses valores, obtm-se os ganhos sugeridos na sintonia Cohen e Coon
(tabela 2.3) e o controlador resulta
1
( ) 1, 2 1 0, 27
1, 7
C s s
s
| |
= + +
|
\
. ( 4.17 )
Tabela 4.3.a
DADOS COLETADOS - REFERNCIA.
Tabela 4.3.b
DADOS COLETADOS - DISTRBIO.
4.1.4.2. Projeto LRGI
O valor 0, 4 Kpre = foi escolhido por meio de tentativas de modo a se obter uma
resposta do tipo sub-amortecida no ensaio preliminar. A figura 4.11 apresenta o grfico do
sinal de sada ( ) y t para um sinal de referncia ( ) v t do tipo degrau de amplitude unitria. Do
grfico de ( ) y t , obtm-se o instante de pico 2, 8 Tp s = e o sobressinal 7,4 % Mp = . O ganho
de regime permanente 0, 54 Kg = determinado dividindo-se o valor de regime de sada pela
amplitude do degrau de referncia aplicado. Com base nessas informaes, a funo de
transferncia estimada resulta
2
1,17
( )
s + 1,87 s + 2,14
F s =
( 4.18 )
0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Ensaio Preliminar
y
(
t
)
Tempo (s)
FIGURA 4.11 ENSAIO PRELIMINAR
O valor 0, 8 Klocus = foi escolhido por meio de tentativas de modo que o esforo de
controle obtido com o controlador LGRI fosse igual ao esforo de controle obtido com o PID
projetado pelo mtodo de Cohen e Coon (1953). Com os valores Kpre , Klocus e com as
informaes do ensaio preliminar determinam-se os controladores
2
0, 32 0, 6 0, 69
1( )
s s
PID s
s
+ +
= ( 4.19 )
e
2
0, 32 0, 69
2( )
s s
PID s
s
+ +
= ( 4.20 )
4.1.4.3. Comparativo
Os grficos da figura 4.11 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de referncia tipo degrau unitrio no instante 5,0 s , utilizando-se o controlador
LGRI e o controlador PID sintonizado pelo mtodo de Cohen e Coon (1953).
Como impusemos que os valores mximos do controle fossem iguais, as demais
caractersticas da resposta podem ser comparadas numa mesma base. No caso deste exemplo,
o controlador LGRI confere um desempenho superior resposta do sistema que pode ser
caracterizado pelo menor sobressinal e tempo de acomodao.
0 5 10 15
0
0.5
1
1.5
2
Resposta a uma Referncia em Degrau
y
(
t
)
Tempo(s)
0 5 10 15
-10
0
10
20
30
40
Controle
m
(
t
)
Tempo (s)
LGRI
C-C
LGRI
C-C
FIGURA 4.12 RESPOSTA A VARIAO DE REFERENCIA.
Os grficos da figura 4.13 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de perturbao tipo degrau de amplitude 10, aplicado no instante 5,0 s.
Dos grficos pode-se constatar que a mxima excurso da sada e o esforo de
controle necessrio so, praticamente, os mesmos.
0 5 10 15
-5
0
5
10
15
Resposta a uma Perturbao em Degrau
y
(
t
)
Tempo (s)
0 5 10 15
-20
-15
-10
-5
0
Controle
m
(
t
)
Tempo (s)
LGRI
C-C
LGRI
C-C
FIGURA 4.13 RESPOSTA AO DISTRBIO.
As tabelas 4.4.a e 4.4.b resumem os comparativos. Para uma variao do sinal de
referncia, comparou-se o esforo de controle (m(t) mximo), o tempo de acomodao Ts da
resposta y(t) e seu sobressinal. Na rejeio de perturbaes, comparam-se as amplitudes
mximas presentes no sinal de controle e na sada, necessrias para rejeitar o distrbio.
m(t) mximo Ts Sobressinal (%)
LGRI 33 4,3 s 20
Z-N 33 7,9 s 80
Tabela 4.4.a
DADOS COLETADOS - REFERNCIA.
|m(t)| mximo y(t) mximo
LGRI 16 10,1
Z-N 18 10,1
Os dados numricos confirmam a anlise qualitativa de que o controlador LGRI
confere um desempenho superior no acompanhamento do sinal de referncia. J quanto
rejeio da perturbao, as respostas so praticamente equivalentes.
4.1.5. Sistema Trocador de Calor
Os trocadores de calor so equipamentos muito comuns nos processos produtivos. Por
este motivo o desempenho do compensador LGRI foi avaliado no controle deste
equipamento.
Um trocador de calor do tipo casco-tubo, operando em contra-corrente com gua de
ambos os lados, suposto adiabtico est esquematicamente na figura 4.14.
FIGURA 4.14 Trocador de Calor Casco-Tubo (GARCIA, 1997)
Esta planta pode ser simplificadamente modelada por uma funo de transferncia de
segunda ordem superamortecida, mais um tempo morto (GARCIA, 1997). Para o projeto do
controlador, considere a funo de transferncia
Tabela 4.4.b
DADOS COLETADOS - DISTRBIO.
0,5
3
( )
(2 1)(3 1)
s
e
G s
s s
=
+ +
( 4.21 )
Uma vez que o mtodo da sntese direta de controladores PID tambm se aplica a esse
tipo de modelo, o desempenho do controlador LGRI s comparado com o desempenho de um
PID projetado pela tcnica da sntese direta.
4.1.5.1. Projeto PID pelo Mtodo da Sntese Direta
Alm dos valores do ganho, tempo morto e constantes de tempo da planta,
necessrio fornecer o valor desejado para a constante de tempo
c
de malha fechada. Neste
exemplo, seu valor foi escolhido igual a 2 s e ser o mesmo valor imposto para o mtodo
LGRI. Obtm-se ento os ganhos sugeridos pelo mtodo da sntese direta (tabela 2.7) e o
controlador resulta
1
( ) 0, 67 1 1, 2
5
C s s
s
| |
= + +
|
\
. ( 4.22 )
4.1.5.2. Projeto LRGI
O valor 0, 4 Kpre = foi escolhido por meio de tentativas de modo a se obter uma
resposta do tipo sub-amortecida no ensaio preliminar. A figura 4.15 apresenta o grfico do
sinal de sada ( ) y t para um sinal de referncia ( ) v t do tipo degrau de amplitude unitria. Do
grfico de ( ) y t , obtm-se o instante de pico 7 Tp s = e o sobressinal 10 % Mp = . O ganho de
regime permanente 0, 54 Kg = determinado dividindo-se o valor de regime de sada pela
amplitude do degrau de referncia aplicado. Com base nessas informaes, a funo de
transferncia estimada resulta
2
0,17
( )
s + 0,66 s + 0,31
F s =
( 4.23 )
0 2 4 6 8 10 12 14 16 18 20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Ensaio Preliminar
y
(
t
)
Tempo (s)
FIGURA 4.15 ENSAIO PRELIMINAR.
O valor 3 Klocus = foi escolhido de forma que a constante de tempo desejada no
acompanhamento do sinal de referncia seja de 2 s. Com os valores Kpre , Klocus e com as
informaes do ensaio preliminar determinam-se os controladores
2
1,19 0, 78 0, 37
1( )
s s
PID s
s
+ +
= ( 4.24 )
e
2
1,19 1,18 0, 37
2( )
s s
PID s
s
+ +
= ( 4.25 )
4.1.5.3. Comparativo
Os grficos da figura 4.16 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de referncia tipo degrau unitrio no instante 2,0 s , utilizando-se o controlador
LGRI e o controlador PID sintonizado pelo mtodo as sntese direta.
Note que ambas as respostas apresentam um comportamento dinmico que se
assemelha resposta de um sistema de primeira ordem com constante de tempo prxima a 2 s,
como esperado pelas duas tcnicas de projeto.
0 2 4 6 8 10 12 14 16 18 20
0
0.5
1
1.5
Resposta a uma Referncia em Degrau
y
(
t
)
Tempo(s)
LGRI
S-D
0 2 4 6 8 10 12 14 16 18 20
0
20
40
60
80
100
120
Controle
m
(
t
)
Tempo (s)
LGRI
S-D
FIGURA 4.16 RESPOSTA A VARIAO DE REFERENCIA.
Os grficos da figura 4.17 mostram o sinal de sada da planta ( ) y t e do controle ( ) m t ,
para um sinal de perturbao tipo degrau de amplitude 10, aplicado no instante 2,0 s.
Dos grficos pode-se perceber que a mxima excurso da sada menor quando a
rejeio da perturbao feita pelo controlador LGRI. Entretanto, o esforo de controle
necessrio para isso maior do que aquele necessrio com o controlador PID projetado pela
tcnica da sntese direta.
As tabelas 4.5.a e 4.5.b resumem os comparativos. Para uma variao do sinal de
referncia, comparou-se o esforo de controle (m(t) mximo) e o tempo de acomodao Ts da
resposta y(t). Na rejeio de perturbaes, comparam-se as amplitudes mximas presentes no
sinal de controle e na sada, necessrias para rejeitar o distrbio.
0 2 4 6 8 10 12 14 16 18 20
-2
0
2
4
6
8
10
Resposta a uma Perturbao em Degrau
y
(
t
)
Tempo (s)
LGRI
S-D
0 2 4 6 8 10 12 14 16 18 20
-12
-10
-8
-6
-4
-2
0
Controle
m
(
t
)
Tempo (s)
LGRI
S-D
FIGURA 4.17 RESPOSTA AO DISTRBIO.
m(t) mximo Ts
LGRI 120 7,5 s
S-D 80 8,2 s
|m(t)| mximo y(t) mximo
LGRI 11,4 6
S-D 10 8,8
Os dados numricos confirmam a anlise qualitativa de que o controlador LGRI e o da
sntese direta tm um desempenho praticamente equivalente quanto ao acompanhamento do
sinal de referncia. J quanto rejeio da perturbao, o controlador LGRI confere uma
rejeio mais efetiva no sentido que o mximo desvio na sada inferior quando comparado
Tabela 4.5.a
DADOS COLETADOS - REFERNCIA
Tabela 4.5.b
DADOS COLETADOS - DISTRBIO
com o mximo desvio obtido com o da sntese direta. Entretanto, isso conseguido custa de
um esforo maior de controle.
4.2. Desempenho Prtico
Como aplicao prtica considere o projeto do controlador LGRI para um sistema
servoposicionador (GOMES, LEONARDI e CRUZ, 2006).
O valor 2 Kpre = foi escolhido por meio de tentativas de modo a se obter uma
resposta do tipo sub-amortecida no ensaio preliminar. A figura 4.18 apresenta o grfico do
sinal de sada ( ) y t para um sinal de referncia ( ) v t do tipo degrau de amplitude unitria. Do
grfico de ( ) y t , obtm-se o instante de pico 0, 29 Tp s = e o sobressinal 48 % Mp = . O
ganho de regime permanente 0, 8 Kg = determinado dividindo-se o valor de regime de sada
pela amplitude do degrau de referncia aplicado. Com base nessas informaes, a funo de
transferncia estimada resulta
2
99
( )
s + 5,06 s + 123,76
F s =
( 4.26 )
O valor 0, 01 Klocus = foi escolhido de forma que a constante de tempo desejada no
acompanhamento do sinal de referncia, seja de 1 s. Com os valores Kpre , Klocus e com as
informaes do ensaio preliminar determinam-se os controladores
2
0, 02 0,1 2, 47
1( )
s s
PID s
s
+ +
= ( 4.27 )
e
2
0, 02 2,1 2, 47
2( )
s s
PID s
s
+ +
= ( 4.28 )
Para comprovar o desempenho do sistema de controle, aplicou-se um degrau unitrio
na entrada de referncia no instante 10 s. Aos 20 s, uma nova entrada de referncia, na forma
de um degrau negativo de amplitude unitria, foi aplicada, s que, desta vez, o sinal de
referncia foi aplicado sem o pr-filtro. Isto permite avaliar a dinmica da malha isolada, que
equivalente dinmica de rejeio de perturbaes adicionadas sada da planta. O
resultado experimental est mostrado na figura 4.19.
0 0.5 1 1.5 2 2.5 3 3.5 4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
FIGURA 4.18 ENSAIO PRELIMINAR SISTEMA SERVO.
0 5 10 15 20 25 30
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
FIGURA 4.19 DESEMPENHO EXPERIMENTAL SISTEMA SERVO.
Note que o sistema exibe uma resposta aproximada a de um sistema de primeira
ordem com constante de tempo aproximada de 1 s quando a excitao de entrada passa pelo
pr-filtro e com uma dinmica mais complexa, quando a excitao entra diretamente na
malha.
4.3. Frmulas Simplificadas de Sintonia
Para que o mtodo seja facilmente aplicvel em situaes prticas, conveniente que
as informaes colhidas do ensaio preliminar e as frmulas dos ganhos dos controladores
PID, sejam simples.
Neste sentido, prope-se usar medidas, mesmo que aproximadas e muitas vezes
imprecisas, do pseudo-perodo T (aproximadamente o dobro do intervalo de tempo entre os
pontos A e B do grfico obtido no ensaio preliminar) e do tempo de acomodao T
s
(instante
de tempo do ponto C, que corresponde a 98% do valor final da resposta do ensaio preliminar).
Vide ilustrao na figura 4.20.
Com estas informaes possvel escrever os ganhos dos PIDs de forma bastante
simples.
y(t)
t
FIGURA 4.20 RESPOSTA DE UM SISTEMA SUBAMORTECIDO.
O parmetro livre de projeto a constante de tempo desejada de malha fechada
c
. Os
demais dados de projeto so Kpre e Kg . A tabela a seguir resume o projeto quando
possvel obter um sistema subamortecido, a partir do ensaio preliminar com dinmica prxima
a de um sistema de segunda ordem.
Ki
c
Kpre
Kg
Kd
2
2
4 2
s
Ki
T T
| |
| |
+
| |
\
\
1 Kp
8 Kd
Ts
2 Kp
1 Kp Kpre +
Tabela 4.6 FRMULAS SIMPLIFICADAS DE SINTONA .
5. CONCLUSES
Este trabalho discutiu a propriedade incremental do Mtodo do Lugar Geomtrico das
Razes e uma aplicao na sintonia de controladores PID. A tcnica de sintonia de
controladores PID proposta realizada em duas etapas. Inicialmente faz-se um ensaio em
malha fechada com um controlador proporcional. Em seguida, o projeto do compensador
realizado por cancelamento de plos. Mostrou-se que a lei de controle obtida uma estrutura
PID de dois graus de liberdade e que o controlador associado ao acompanhamento do sinal de
referncia leva a desempenhos prximos a sistemas de primeira ordem enquanto que o
controlador associado rejeio de distrbio tem uma caracterstica que depende tambm da
dinmica da malha do ensaio preliminar e, portanto, de certa forma, independente.
Como exemplos numricos do procedimento, diversas plantas foram consideradas e seu
desempenho comparado com outras tcnicas clssicas de sintonia. Percebeu-se que o
controlador obtido pelo mtodo proposto tem desempenho comparvel aos demais mtodos e,
s vezes, at superior. Como aplicao real considerou-se um caso de controle de posio de
um servo mecanismo.
Para tornar o mtodo uma ferramenta cmoda, props-se tambm regras prticas de
sintonia dos controladores de dois graus de liberdade. Para se obter frmulas elementares, as
informaes extradas do ensaio experimental preliminar so meramente o valor aproximado
do pseudo-perodo e o tempo de acomodao, segundo o critrio de 98% do valor final.
Como proposta de continuidade deste trabalho sugere-se a aplicao do mtodo em casos
reais da indstria.
REFERNCIAS BIBLIOGRFICAS
ALTMANN, W. Practical Process Control for Engineers and Technicians. Perth - Austrlia,
Ed. Elsevier, 2005.
ASTRM, K. J.; HGGLUND, T. Automatic Tuning of PID Controllers. ISA Instrument
Society of America, 1988.
ATHANS, M. On The Design of P-I-D Controllers Using Optimal Linear Regulatory Theory,
Automtica, Vol.7, pp. 643-647, 1971.
COHEN, G. H.; COON, G. A. Theoretical Considerations of Retarded Control. Transactions
of the ASME, v.75, p.827-34, Jul. 1953.
CAMPOS, M. C. M. M de.; TEIXEIRA, H. C. G.; Controle Tpicos de equipamentos e
processos industriais, So Paulo, Ed. Blucher, 2006.
EVANS, W.R. Analysis of Control System, AIEE Transactions, vol. 67, pp. 547-551, 1948.
EVANS, W. R.Control System Synthesis and Root Locus Method, AIEE Transactions, vol.
69, pp. 66-69, 1950.
DORF, R. C.; BISHOP, R. H. Sistemas de Controle Modernos, 8a Edio, Rio de Janeiro,
LTC, 2001.
GARCIA, C.; Modelagem e Simulao de Processos Industrias e de Sistemas
Eletromecnicos. So Paulo, Editora da Universidade de So Paulo EDUSP, 1997.
GARCIA, C.; Apostila do controle de processos industriais. Projeto e sintonia de
controladores PID analgicos. 2003
GOMES, S.C.P.; LEONARDI, F.; DA CRUZ J. J. Incremental Root Locus and PID Tuning. XXII
CIIQ - V CAIQ Buenos Aires AR. 2006
HEMERLY, H. M. Sintonizao tima de Controladores PID Digitais, Controle &
Automao, Vol.3, No 1, pp. 291-298, Maro/Abril, 1991.
LEONARDI, F.; DA CRUZ, J. J. Controladores Multivariveis Robustos com Estrutura
P.I.D. II Congresso Internacional da ISA, Salvador, pp.53-62, 1993.
LOPEZ, A. M.; MILLER, J. A., SMITH, C. L. Tuning controllers with error-integral criteria
Instrumentation Technology, v.14, n.11, p. 57-62, (1967 apud GARCIA 2003).
MONTEIRO, L.H.A. ; DA CRUZ, J. J. Simple answers to usual questions about unusual
forms of the Evans' root locus plot. Sba Controle & Automao vol.19 .no.4.
Natal. Dec. 2008
MAYA, F.; LEONARDI, P. A. Sintonia Robusta de Controladores de Malha. 10 Congresso
Brasileiro de Engenharia Qumica, So Paulo, 1994.
MUKHOPADHYAYA, S. PID Equivalent of Optimal Regulator, Electronics Letters, Vol.14,
No 25, pp. 821-822, Dec 1978.
NISE, N. S. Engenharia de Sistemas de Controle, 3a Edio, Rio de Janeiro, LTC, 2002.
OGATA, K. Engenharia de Controle Moderno, 2 Edio, Rio de Janeiro, Prentice Hall, 1997.
OGATA, K. Engenharia de Controle Moderno, 4 Edio, So Paulo, Prentice Hall, 2003.
STEPHANOPOULOS, G., Chemical Process Control, An introduction the theory and pratice.
So Paulo, Prentice Hall, 1984.
SEBORG, D. E., EDGAR, T. F., MELLICHAMP, D. A. Process Dynamics and Control. John
Wiley & Sons. 1989.
TAVAKOLI, S. e TAVAKOLI, M., Optimal tuning of PID Controllers for first order plus
time delay model using dimensional analysis. The Fourth Int. Conf. on Control and
Automation, ICCA-03, 10-12 june, Montreal. 2003
ZIEGLER, J. G.; NICHOLS, N. B. Optimum setting for Automatic Controllers, Transactions
of the ASME, v.64, n.11, p.759-65, Nov. 1942 .
Você também pode gostar
- Sistemas Elétricos Djalma CaselatoDocumento146 páginasSistemas Elétricos Djalma CaselatoMabelle Cristina100% (1)
- Medição de resistência de pé-de-torreDocumento3 páginasMedição de resistência de pé-de-torreTiago Balbino100% (1)
- Transmissão de Energia Elétrica IDocumento150 páginasTransmissão de Energia Elétrica ITiago BalbinoAinda não há avaliações
- Sistemas Elétricos Djalma CaselatoDocumento146 páginasSistemas Elétricos Djalma CaselatoMabelle Cristina100% (1)
- Tabela Da Atalhos - Excel PDFDocumento1 páginaTabela Da Atalhos - Excel PDFpollyannasilvad33% (3)
- NBR 15751 - Sistema de Aterramento de SubestaçõesDocumento53 páginasNBR 15751 - Sistema de Aterramento de SubestaçõesPaulo Renato Damasceno84% (19)
- 113 Chesf Et Eq SC Mai2019Documento52 páginas113 Chesf Et Eq SC Mai2019Tiago BalbinoAinda não há avaliações
- Sistemas Elétricos DePotência - Métodos de Analise e SoluçãoDocumento32 páginasSistemas Elétricos DePotência - Métodos de Analise e SoluçãoTiago BalbinoAinda não há avaliações
- Diretrizes gerais para fornecimento de equipamentosDocumento35 páginasDiretrizes gerais para fornecimento de equipamentosTiago BalbinoAinda não há avaliações
- Malhas de Aterramento em SubestaçõesDocumento58 páginasMalhas de Aterramento em SubestaçõesEmerson Diniz100% (4)
- Acompanhamento Do Volume - Açude BoqueirãoDocumento1 páginaAcompanhamento Do Volume - Açude BoqueirãoTiago BalbinoAinda não há avaliações
- (17 Rev.05 브라질향 최종) LG RAC Wallmounted V001 UG MFL69782201 190715 00 PRINT PDFDocumento48 páginas(17 Rev.05 브라질향 최종) LG RAC Wallmounted V001 UG MFL69782201 190715 00 PRINT PDFMaxluthorAinda não há avaliações
- Diretrizes gerais para fornecimento de equipamentosDocumento35 páginasDiretrizes gerais para fornecimento de equipamentosTiago BalbinoAinda não há avaliações
- ISO 31010 Gesto de Riscos - Tcnicas para o Processo Da AvaliaoDocumento126 páginasISO 31010 Gesto de Riscos - Tcnicas para o Processo Da AvaliaoEvandro De Souza Ramos85% (13)
- NBR 5410 2004 Corrigida 2008Documento217 páginasNBR 5410 2004 Corrigida 2008sgrinev100% (8)
- Plug ProteçãoDocumento9 páginasPlug ProteçãoTiago BalbinoAinda não há avaliações
- NBR 5410 2004 Corrigida 2008Documento217 páginasNBR 5410 2004 Corrigida 2008sgrinev100% (8)
- Projeto de rede de distribuição aérea 15kVDocumento173 páginasProjeto de rede de distribuição aérea 15kVLuis Eduardo NeryAinda não há avaliações
- 2020 01 09 - Pre Via Operacional 4T19 BIDI11Documento1 página2020 01 09 - Pre Via Operacional 4T19 BIDI11Tiago BalbinoAinda não há avaliações
- Guia de Declaração IRPF 2020 Ações FIIs Stocks REITs e ETFsDocumento66 páginasGuia de Declaração IRPF 2020 Ações FIIs Stocks REITs e ETFsTiago BalbinoAinda não há avaliações
- Decreto regulamenta padrões de ruídosDocumento10 páginasDecreto regulamenta padrões de ruídosJonascientAinda não há avaliações
- Fornecimento de energia elétrica em tensão secundária até 3 unidadesDocumento104 páginasFornecimento de energia elétrica em tensão secundária até 3 unidadesLuciano de AlmeidaAinda não há avaliações
- Ar Condicionado Multi Quadri Split HW Inverter LG 4x9000 Btus Quentefrio 220v A4uw30gfa2awgzbrz 2203 ManualDocumento40 páginasAr Condicionado Multi Quadri Split HW Inverter LG 4x9000 Btus Quentefrio 220v A4uw30gfa2awgzbrz 2203 ManualJonathan FrutuosoAinda não há avaliações
- Produtos Inteligentes para Automatização de PortõesDocumento6 páginasProdutos Inteligentes para Automatização de PortõesTiago BalbinoAinda não há avaliações
- Manual do multímetro digitalDocumento14 páginasManual do multímetro digitalTiago BalbinoAinda não há avaliações
- Datasheet HDs WD Purple 01 19 PDFDocumento2 páginasDatasheet HDs WD Purple 01 19 PDFTiago BalbinoAinda não há avaliações
- ESP - DISTRIBU-ENGE-0010 - Postes de Concreto Armado para Redes de Distribuição - REV01 PDFDocumento17 páginasESP - DISTRIBU-ENGE-0010 - Postes de Concreto Armado para Redes de Distribuição - REV01 PDFHerbert ThomasAinda não há avaliações
- NormaDocumento75 páginasNormaTiago BalbinoAinda não há avaliações
- Base para ProteçãoDocumento12 páginasBase para ProteçãoTiago BalbinoAinda não há avaliações
- NormaDocumento75 páginasNormaTiago BalbinoAinda não há avaliações