Você também pode gostar
- Curso de SR y Combinadores de AM y FMDocumento146 páginasCurso de SR y Combinadores de AM y FMJorge Leonardo Ñauta100% (1)
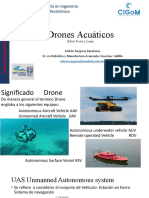
- Drones AcuaticosDocumento18 páginasDrones AcuaticosRuben RaygosaAinda não há avaliações
- Radioaficionados Calculo de Longitud de Cable CoaxialDocumento6 páginasRadioaficionados Calculo de Longitud de Cable CoaxialAndy ChirinosAinda não há avaliações
- Practica 1 RadiadoresDocumento11 páginasPractica 1 RadiadoresDiego ViloriaAinda não há avaliações
- Qué es WiMAX-Resumen de la tecnología de transmisión inalámbricaDocumento8 páginasQué es WiMAX-Resumen de la tecnología de transmisión inalámbricaGissell MartinezAinda não há avaliações
- Calculador de TrampasDocumento4 páginasCalculador de TrampasAwpx JuegosAinda não há avaliações
- Practica 3Documento10 páginasPractica 3vergaalavateAinda não há avaliações
- Antenas y PropagaciónDocumento29 páginasAntenas y PropagaciónHarold Fabian Chilatra CarvajalAinda não há avaliações
- Ingeniería San JoséDocumento25 páginasIngeniería San JoséJESUS45Ainda não há avaliações
- Análisis Infraestructura 5 OperadoresDocumento12 páginasAnálisis Infraestructura 5 OperadoresAlejandro CastellanosAinda não há avaliações
- Norma IEEE 802.11gDocumento8 páginasNorma IEEE 802.11gJhonnier BenavidesAinda não há avaliações
- Transmisión ASK y demodulación envolventeDocumento7 páginasTransmisión ASK y demodulación envolventeZexars -Ainda não há avaliações
- Técnicas de acceso múltiple y gestión del acceso en sistemas de comunicacionesDocumento29 páginasTécnicas de acceso múltiple y gestión del acceso en sistemas de comunicacionesIvan BolañoAinda não há avaliações
- Libro Estandares 802Documento107 páginasLibro Estandares 802juda300100% (1)
- Del 1G al 5G: Una breve historia de la evolución de los estándares móvilesDocumento6 páginasDel 1G al 5G: Una breve historia de la evolución de los estándares móvilesSait AlvaroAinda não há avaliações
- Distancias Máximas para Equipos de Redes InalámbricasDocumento8 páginasDistancias Máximas para Equipos de Redes InalámbricasNaolsSloanAinda não há avaliações
- Antena omnidireccional VHF de 135-174 MHzDocumento2 páginasAntena omnidireccional VHF de 135-174 MHzPedro RamosAinda não há avaliações
- Problemas1 PDFDocumento24 páginasProblemas1 PDFPablo Joscar Sanchez GotopoAinda não há avaliações
- Guía de LaboratorioNro1 Com MovilesDocumento4 páginasGuía de LaboratorioNro1 Com MovilesElizabeth Mendoza GutierrezAinda não há avaliações
- Sistemas Globales de Navegación Por SatéliteDocumento17 páginasSistemas Globales de Navegación Por Satélitesant_veAinda não há avaliações
- 2 Descripcion Funcional Del SistemaDocumento22 páginas2 Descripcion Funcional Del Sistemamartin linaresAinda não há avaliações
- GLXD4 Guide es-ESDocumento32 páginasGLXD4 Guide es-ESOscar Armando Alvarado BarahonaAinda não há avaliações
- Manual ISODocumento91 páginasManual ISOGerson VelásquezAinda não há avaliações
- RadioenlacesDocumento3 páginasRadioenlacesAlex MejiaAinda não há avaliações
- Resumen Del Capítulo 1 de Cisco.Documento8 páginasResumen Del Capítulo 1 de Cisco.Leli BazitskaAinda não há avaliações
- Monitor Ivy Biomedical 7800Documento58 páginasMonitor Ivy Biomedical 7800stafarob2022Ainda não há avaliações
- 5.3 Filtro Pasa BandaDocumento13 páginas5.3 Filtro Pasa BandaaugustoAinda não há avaliações
- Redes y Tipos de ComponentesDocumento15 páginasRedes y Tipos de ComponentesAlexis VargasAinda não há avaliações
- E.C. II Parte 5 Transmisores de RFDocumento48 páginasE.C. II Parte 5 Transmisores de RFebertgabriel667Ainda não há avaliações
- Procedimientos instrumentalesDocumento116 páginasProcedimientos instrumentalesErick Avendaño100% (2)