Escolar Documentos
Profissional Documentos
Cultura Documentos
Robo Motor
Enviado por
Joaquim Dos Santos Veras MaiaDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Robo Motor
Enviado por
Joaquim Dos Santos Veras MaiaDireitos autorais:
Formatos disponíveis
2
PROJETO MASURA
1 INTRODUO........................................................................................ 4
2 HISTRIA DA EQUIPE BOTVILLE .......................................................... 5
3 GUERRA DE ROBS............................................................................... 7
4 VALORES DA EQUIPE BOTVILLE............................................................ 8
4.1 MISSO............................................................................................ 8
4.2 VISO.............................................................................................. 8
4.3 POLTICA .......................................................................................... 8
5 COMANDO ELTRICO ............................................................................ 9
5.1 RDIO TRANSMISSOR E RECEPTOR ............................................................ 9
Figura 1. Detalhes controle e receptor ..................................................... 9
5.2 DRIVER DE ACIONAMENTO GERAL ........................................................... 10
Figura 2. Driver de Acionamento Geral................................................... 10
5.3 DRIVER DE MOVIMENTAO (PONTE H) .................................................... 10
Figura 3. Ponte H................................................................................ 11
Figura 4. Micro chaves......................................................................... 12
5.4 SINALIZAO EXTERNA........................................................................ 12
Figura 5. Esquema acionamento do LED................................................. 13
Figura 6. Sinalizador LED..................................................................... 13
5.5 CHAVE GERAL................................................................................... 14
Figura 7. Chave Geral.......................................................................... 14
5.6 MOTORES CC ................................................................................... 14
Figura 8. Motor Utilizado...................................................................... 14
5.7 DESCRIO DE COMPONENTES UTILIZADOS................................................ 15
5.8 ESQUEMA ELTRICO GERAL................................................................... 15
Figura 9. Esquema Eltrico Geral .......................................................... 16
6 FABRICAO ESTRUTURA MECNICA ................................................. 17
Figura 10. Vista dos eixos................................................................... 17
Figura 11. Vista dos eixos................................................................... 18
Figura 12. Vista dos mancais............................................................... 18
Figura 13. Barra chata ....................................................................... 19
6.1 DEMONSTRAO DO CONJUNTO MECNICO................................................. 19
Figura 14. Conjunto Mecnico ............................................................. 20
7 LISTA DE GASTOS COM O PROJETO .................................................... 21
7.1 PATROCNIO..................................................................................... 21
8 RESULTADOS OBTIDOS....................................................................... 22
9 PARTICIPAO EM EVENTOS.............................................................. 23
9.1 FECIETT.......................................................................................... 23
9.2 PALESTRA SEMANA ACADMICA DE AUTOMAO INDUSTRIAL ............................ 23
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
4
1 INTRODUO
Em busca de novas tecnologias, este o assunto mais discutido neste sculo,
e como acadmicos do curso de Engenharia de Controle e Automao temos a
necessidade de buscar algo de novo. Neste relatrio ser abordado o projeto do
primeiro rob de guerra desenvolvido pela equipe BotVille, pertencente a
universidade IST ( Instituto Superior Tupy).
Primeiramente ser discutido a histria da equipe, a trajetria e todo o
processo de idias at chegar ao rob que hoje denominado: MASURA. Tambm
ser detalhado todo o projeto mecnico e eltrico do rob assim como a relao de
materiais usados.
Os resultados obtidos na Guerra de robs 2006 na liga ENECA, foram
indiscutveis, tendo um timo rendimento. Apesar das dificuldades de serem
iniciantes na guerra de robs, e pelo fato de varias universidades conceituadas
participarem dos eventos, bons resultados foram obtidos.
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
5
2 HISTRIA DA EQUIPE BOTVILLE
A equipe BotVille nasceu aps uma viagem dos estudantes dos 1 e 2s
semestres do curso de Engenharia de Controle e Automao Florianpolis, SC, em
09 de outubro de 2005, com o objetivo de conhecer o ENECA Encontro Nacional
dos Estudantes de Engenharia de Controle e Automao, para obter maiores
informaes sobre a rea de atuao profissional e a prpria integrao entre as
instituies de ensino participantes.
Na abertura do encontro ocorreu a Guerra de Robs, um tradicional evento
que ocorre paralelamente ao ENECA, e j foi o bastante para despertar um grande
interesse de todos os alunos a organizar uma equipe para projetar tambm um
rob de guerra, e colocar na prtica o que estava sendo visto durante os primeiros
semestres da graduao.
Os estudantes que estavam nessa viagem s participaram da Guerra de
Robs no domingo j que a maioria trabalhava e, alm disso, tinham a semana de
aulas a cumprir.
Na volta Joinville, a euforia e o surgimento de idias para o
desenvolvimento de um rob tomaram conta, mas, logo foram deixados de lado,
pois o ano letivo estava chegando ao final e todos tinham provas e trabalhos a
entregar.
No inicio de 2006, os alunos com os nimos recuperados, entre uma
conversa e outra no intervalo das aulas voltaram a tocar no assunto do rob. Desta
vez, tinham o ano todo pela frente e foi a ento que todos decidiram comear uma
equipe.
Lanaram o convite para todas as turmas de Engenharia de Controle e
Automao, e quem tivesse o interesse poderia participar da equipe. No dia 25 de
maro aconteceu a primeira reunio, em uma sala de aula do IST, onde 40 alunos
dos vrios semestres assim como dois amigos do grupo de outros cursos do IST e
um laboratorista que demonstraram interesse estavam presentes para dar inicio ao
projeto.
Em um churrasco para a integrao do pessoal, no comeo de abril, foi
decidido o nome da equipe assim como o nome do rob que estaria sendo
desenvolvido no decorrer do ano. O nome BotVille foi escolhido em homenagem
cidade que a equipe estaria representando no evento (Joinville) e o nome do
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
6
primeiro rob: MASURA, que foi uma homenagem s trs meninas que faziam parte
da equipe: Martha, Suzele e Rafaela - que com as iniciais de seus nomes deram o
nome ao rob.
A equipe foi subdividida em trs grupos de acordo com a aptido de cada
integrante: o grupo da mecnica responsvel pelo projeto e execuo da estrutura
do rob, o grupo da eltrica responsvel pela parte eltrica, eletrnica e rdio
freqncia e o grupo da organizao responsvel pela administrao e marketing.
Aps algumas reunies e pesquisas realizadas sobre os principais robs
competidores, seus pontos fracos e fortes, foi dado o incio ao projeto do MASURA.
Como o oramento era limitado, no existindo uma quantia significativa de
dinheiro para dar inicio compra de materiais, foram feitos festas e churrascos
para angariar fundos. Assim, o MASURA comeava a tomar vida de acordo com o
dinheiro em caixa.
No decorrer da execuo do projeto, a equipe contou com o apoio da Vega do
Sul na doao da chapa de ao, o emprstimo das mquinas oferecido pela
Erzinger, quantias em dinheiro cedidas pela Transtusa, Ciser e ons Consultores e a
SOCIESC com o emprstimo de laboratrios e materiais.
Contando com noites de sono perdidas, dia 2 de setembro o MASURA estava
praticamente pronto e embarcava no nibus juntamente com a equipe e demais
alunos do curso com destino Curitiba para participar da Guerra de Robs que
neste ano de 2006 acontecia no campus da PUC PR dia 3 de setembro. E depois de
alguns ajustes na madrugada do dia 3, o rob estava pronto para a Guerra.
Aps uma atuao fantstica do pequeno notvel e um show da torcida mais
animada do evento, a equipe BotVille em sua primeira participao conquistava o
sexto lugar entre as 20 equipes participantes, equipes estas que estavam
representando as mais conceituadas universidades do Brasil.
Contando com apenas 20 dos 40 alunos que comearam o projeto, entre
provas e trabalhos e quaisquer outros problemas que houve, desde pequenos
desentendimentos at o baixo oramento, a Equipe BotVille hoje mostra que a
determinao e o esprito de equipe esto frente de qualquer coisa!
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
7
3 GUERRA DE ROBS
A robtica j faz parte do cotidiano. Cada dia que se passa, as empresas
esto cada vez mais a procura da automao de processos e a robotizao do
ambiente de trabalho, a fim de otimizar a produo. Mas a robtica no faz parte
apenas da indstria brasileira, mas tambm das faculdades. Assim, com o objetivo
de mostrar as possibilidades da engenharia de controle e automao e
principalmente para a diverso e interao dos estudantes e de todos aqueles que
gostam deste esporte, foi criada a "Guerra de Robs".
O objetivo da batalha apenas um: destruir seus oponentes e sobreviver aos
ataques. Neste evento, robs de at 55 quilos controlados remotamente lutam em
uma arena onde a lei a do mais forte: destruir ou ser destrudo.
A Guerra de Robs a atrao que d incio ao ENECA, evento este que traz
como atraes: palestras, exposies, debates e atividades de laboratrio que
permitiram a troca de experincias entre os alunos das maiores instituies de
ensino em automao do Brasil.
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
8
4 VALORES DA EQUIPE BOTVILLE
4.1 MISSO
Contribuir com o desenvolvimento cientfico e tecnolgico na rea de
Controle e Automao atravs da pesquisa continuada e aplicao do conhecimento
adquirido.
4.2 VISO
Ser referncia nacional de pesquisa aplicada em robtica mvel.
4.3 POLTICA
Esprito de Equipe
Excelncia
Comprometimento
Conscincia Ambiental
Responsabilidade Social
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
9
5 COMANDO ELTRICO
A idia para efetuar um comando eltrico surgiu quando a equipe recebeu o
rdio-transmissor e o receptor, a partir da iniciou-se um trabalho de elaborar um
projeto em funo do se tinha em mos. Como a equipe no obtinha recursos
financeiros suficientes para se adquirir componentes dedicados para a aplicao em
questo, utilizaram-se materiais que so facilmente encontrados no mercado e que
no apresentavam custos elevados como, por exemplo, rels automotivos,
componentes eletrnicos, etc.
5.1 RDIO TRANSMISSOR E RECEPTOR
O rdio-transmissor (controle) possua 4 canais onde cada um deles
responsvel por acionar um dos dois sentidos de giro dos dois motores
responsveis pela movimentao do rob. Os sinais do controle so emitidos com
uma freqncia de 72.730 MHz para o receptor que possui 8 canais sendo que o
primeiro responsvel pela alimentao do receptor e dos servos motores onde
conectada uma bateria de 4.8Vcc 600mAh, nos canais 2 e 3 so conectados os
servos motores e o quarto canal utilizado como emissor de um sinal de 4.8Vcc de
pico (300mV RMS) que surgi em todos os canais do receptor quando o controle
ligado, este sinal tratado por um circuito dedicado que transforma esses 300mV
em 12Vcc para chaveamento de um rel de bobina 12Vcc e contatos capazes de
chavear correntes de at 70A, onde passa toda a alimentao dos motores.
Figura 1. Detalhes controle e receptor
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
10
5.2 DRIVER DE ACIONAMENTO GERAL
Um dos desafios encontrados na confeco do comando eltrico foi a
elaborao de um circuito que transformasse o sinal de 300mV RMS emitido pelo
receptor em um sinal no qual fosse possvel ligar e desligar o rob pelo controle,
sendo que este recurso imposto como regra nos campeonatos de guerra de
robs.
Atravs ensaios e testes realizados em laboratrios eletrnicos conseguiu-se
chavear um transistor BC-558 que satura a base de um outro transistor BD-140
responsvel pelo chaveamento de um rel que, por sua vez, comuta a alimentao
geral do rob. Conforme figura abaixo:
Figura 2. Driver de Acionamento Geral
5 5. .3 3 DRIVER DE MOVIMENTAO (PONTE H)
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
11
O controle do sentido de giro dos motores feito por pontes H de rels
automotivos de bobina 12V e contato de 40A, que possuem apenas um contato
normalmente aberto, esses rels so acionados por micro chaves NA que so
comutadas mecanicamente pela movimentao das hastes acopladas nos eixos dos
servos motores. Conforme a prxima figura: Driver de Movimentao
Com relao aos contatos desses rels, estes so responsveis pelo
acionamento dos motores em ambos os sentidos.
Figura 3. Ponte H
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
12
De acordo com a figura acima, cada contato S comutado por uma das 4
bobinas de uma das placas ponte H, o controle do sentido de giro dos motores se
d pela seqncia de fechamento desses contatos, Quando os contatos S1 e S4 se
fecham o motor gira em um sentido, quando S2 e S3 se fecham o motor gira no
sentido contrrio ao anterior.
Figura 4. Micro chaves
No layout acima, a seqncia de acionamento das bobinas dos rels para o
rob andar para frente K1 - K3 e K7 - K6, para mover-se para trs se aciona as
bobinas K2 - K4, e K8 K5. Para realizar curvas e giros em torno do prprio eixo
basta se inverter o sentido de giro de um motor em relao ao outro.
5.4 SINALIZAO EXTERNA
Uma das regras da competio que todo rob deve conter um sinal
luminoso indicando que o mesmo est ligado, este sinal deve ser visvel pelo
pblico participante.
Ento a primeira idia foi usar 2 leds de auto brilho, um na parte superior e
outro na parte inferior, interligados em paralelo com a bobina do rel de
acionamento geral, assim quando o controle do rob ligado os leds acendiam.
Porm a equipe adquiriu um led especial utilizado para derretimento das resinas
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
13
que fixam os aparelhos dentrios nos dentes, esse led possue uma potncia de 5W
sendo que sua alimentao de 7,8V e sua corrente nominal de 700mA.
Figura 5. Esquema acionamento do LED
Conforme o esquema acima, o led de sinalizao ligado em srie com o
contato do rel de acionamento geral, esta foi a melhor maneira de ligao pois por
puxar uma corrente de 700mA no poderia ser conectado em paralelo com a bobina
do rel e com o led 1 pelo fato do transistor BD-140 no suportar a soma das
correntes dessas 3 cargas.
Colocado na parte superior do rob o led emitiu luz suficiente para
sinalizao sendo que para aumentar o efeito do led, o mesmo recebeu um suporte
de acrlico, quando estava ligado todo o acrlico era iluminado, como demonstra a
figura abaixo:
Figura 6. Sinalizador LED
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
14
5.5 CHAVE GERAL
Outra regra imposta pela organizao que os robs devem conter uma
chave geral de acionamento mecnico. A corrente total do rob era
aproximadamente 70A, necessitava-se ento de uma chave que suportasse essa
corrente, como no foi encontrada nas lojas especializadas da regio a soluo foi
utilizar uma seccionadora tripolar sendo que seus 3 contatos foram ligados em
srie.
Figura 7. Chave Geral
5.6 MOTORES CC
Os motores utilizados foram 2 motores CC 12V GPB-Bosch de 300W. Esses
motores so comumente encontrados em ventoinhas de veculos. Segue abaixo as
especificaes tcnicas dos motores.
Figura 8. Motor Utilizado
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
15
5.7 DESCRIO DE COMPONENTES UTILIZADOS
Rdio Controle Futaba de 4 canais;
Receptor Futaba FP-R1270F de 8 canais;
2 Servos motores FUTABA FP-S148;
4 micro chaves fim de curso;
9 rels 12V 70A;
9 diodos 1N4007;
2 motores CC 12V GPB-Bosch 300W;
1 capacitor eletroltico de 1F;
1 capacitor eletroltico de 470F;
1 transistor BC-558;
1 transistor DB-140;
2 Leds de alto brilho;
3 resistores (5.6K, 330, 22-25W);
1 chave seccionadora tripolar;
9 baterias 12V 7Ah;
2 baterias 4.8V 600mAh;
4 placas de fibra.
5.8 ESQUEMA ELTRICO GERAL
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
16
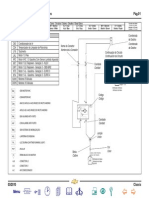
Figura 9. Esquema Eltrico Geral
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
17
6 FABRICAO ESTRUTURA MECNICA
O processo de fabricao mecnica do rob iniciou-se de acordo com a
quantia de dinheiro em caixa, como no existia investimento suficiente para a
compra de material adequado foram usadas barras de ao 1020 para estrutura do
chassi, assim como a chapa ao 1020 da Vega do Sul para fazer a carenagem do
rob.
A inteno de fazer um rob em forma circular era diminuir os pontos de
maior impacto das armas dos oponentes, e tambm facilitar a fabricao, tirando
os cantos e suas emenda. Devido ao fato do rob no ter uma arma, seu maior
ataque era a defesa, para isso ele foi estruturando absorver grandes impactos.
Para arredondar as cantoneiras a empresa Erzinger cedeu uma calandra,
uma mquina que d a forma cilndrica a quaisquer tipos de chapas e hastes, para
a fabricao dos anis superior e inferior com 600mm de dimetro. Para efetuar os
cortes necessrios nas chapas de ao foi utilizado o servio terceirizado de uma
maquina CNC de corte a laser.
Solda MIG foi usada para unir o anel superior com o inferior atravs de
pequenas barras com 150mm de altura dando forma ao chassi.
Os eixos de ao 1020 fazem a transmisso do motor para as polias, estes
eixos so acoplados diretamente ao motor e o rebaixo acoplado ao mancal, sendo
assim: toda a potncia de rotao do motor transmitida ao eixo, que por sua vez,
fixa as polias.
Figura 10. Vista dos eixos
Estes eixos de ao 1020 fazem a transmisso das polias, neles so acopladas
as polias, que adiante fixaro as correias.
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
18
Figura 11. Vista dos eixos
Os mancais de alumnio foram usados para diminuir peso, sendo que seu
princpio garantir a sustentao dos rolamentos que sero acoplados nos eixos.
Figura 12. Vista dos mancais
As polias de alumnio utilizadas alojam e fixam as correias que, no entanto,
transmitem a rotao proveniente do motor. Vale ressaltar que existem dois
conjuntos de polias, com dimetros diferentes para otimizar a rotao do motor que
transformada em trao para as rodas.
A relao da reduo usada nas polias de 4 para 1. Sendo assim, quatro
giros completos da polia menor geram apenas um na polia maior. A relao de
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
19
reduo tem apenas como objetivo aumentar a trao das rodas, existe um
conjunto de transmisso para cada roda.
A barra chata 2x 1/4 de ao 1020 foi utilizada no suporte dos mancais aos
eixos de transmisso das rodas de movimentao.
Figura 13. Barra chata
A chapa laminada 1,07mm RF foi utilizada no fechamento superficial, j que
esta chapa tem como caracterstica ser resistente impactos e penetrao de
ferramentas de corte, impacto e giro.
A Viga C 85 x 20 x 3 (mm) ao 1045 foi utilizada no suporte dos mancais e
no motor de transmisso das rodas de movimentao, servindo tambm como
sustentao dos componentes do chassi.
6.1 DEMONSTRAO DO CONJUNTO MECNICO
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
20
Figura 14. Conjunto Mecnico
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
21
7 LISTA DE GASTOS COM O PROJETO
Gastos com material Eltrico R$ 520,15
Gastos com material Mecnico R$ 376,89
Gastos com Transporte na execuo R$ 165,07
Gastos com Transporte a Curitiba
Transtusa
R$ 550,00
Gastos com Hotel R$ 1.020,00
Gastos com Inscrio ENECA R$ 220,00
Gastos com Equipe no BOX R$ 40,00
Gastos com Entrada no Evento R$ 130,00
TOTAL R$ 3.022,11
7.1 PATROCNIO
Rudnick e Tip-Top R$ 100,00
Auxlio de Deputado R$ 300,00
Sociesc R$ 1.620,00
Transtusa (desconto) R$ 300,00
ons Consultores R$ 100,00
Ciser R$ 300,00
TOTAL (*) R$ 2.720,00
(*) Foi emprestado equipe Rdio Controle Futaba de 4 canais, e receptor Futaba FP-
R1270F de 8 canais no valor de R$1600.00.
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
22
8 RESULTADOS OBTIDOS
O rob MASURA disputou 6 rounds durante a 6 Guerra de Robs, obteve 4
vitrias e 2 derrotas, ficando assim em 6 lugar na classificao geral.
SOCIESC INSTITUTO SUPERIOR TUPY ENGENHARIA DE CONTROLE E AUTOMAO
23
9 PARTICIPAO EM EVENTOS
9 9. .1 1 FECIETT
A Feira de Cincias e Tecnologia da Escola Tcnica Tupy foi a grande
oportunidade de divulgao do projeto aps a participao na Guerra de Robs.
Durante os 3 dias de feira a equipe em seu stand demonstrou o que era a Guerra
de Robs a partir de vdeos, material impresso, explicaes ao publico e pequenas
apresentaes do rob MASURA.
9.2 PALESTRA SEMANA ACADMICA DE AUTOMAO INDUSTRIAL
A equipe BotVille foi convidada pelo corpo docente do IST apresentar o
projeto do rob MASURA aos acadmicos do curso de Engenharia de Controle e
Automao, Tecnologia em Automao Industrial e curso tcnico em Automao
Industrial. A palestra foi ministrada pelo Professor Werther Serralheiro.
Você também pode gostar
- Apostila Arduino Vol 2Documento65 páginasApostila Arduino Vol 2Williams Silva67% (3)
- Contos e Poesias 2015 PDFDocumento56 páginasContos e Poesias 2015 PDFJoaquim Dos Santos Veras MaiaAinda não há avaliações
- Cms Files 5851 1466285352apostila Arduino Basico Vol 3.1Documento61 páginasCms Files 5851 1466285352apostila Arduino Basico Vol 3.1Leonardo Moreira LeiteAinda não há avaliações
- Man TS7200 9200DVB-S2 PDFDocumento19 páginasMan TS7200 9200DVB-S2 PDFJoaquim Dos Santos Veras MaiaAinda não há avaliações
- Man 9090lam Imp PDFDocumento12 páginasMan 9090lam Imp PDFJoaquim Dos Santos Veras MaiaAinda não há avaliações
- Man TS3010 PDFDocumento2 páginasMan TS3010 PDFJoaquim Dos Santos Veras MaiaAinda não há avaliações
- Man TS700HD 900HD DVB-S2 PDFDocumento20 páginasMan TS700HD 900HD DVB-S2 PDFJoaquim Dos Santos Veras MaiaAinda não há avaliações
- Curso Injeção Eletronica 2Documento141 páginasCurso Injeção Eletronica 2Pampoline Carvalho Chaves Chaves100% (2)
- DeDocumento43 páginasDeEdvando Souza Teles100% (1)