Você também pode gostar
- DS2 PDFDocumento8 páginasDS2 PDFAbdelilah Elmesbahi100% (1)
- TD 3 CinemaTiqueDocumento15 páginasTD 3 CinemaTiqueMohamed OuladAinda não há avaliações
- Mecanismes ExercicesDocumento6 páginasMecanismes ExercicesOumaima BK0% (1)
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDocumento6 páginasCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelAinda não há avaliações
- TD 13 - Comportement Cinématique Des SystèmesDocumento9 páginasTD 13 - Comportement Cinématique Des Systèmesbhs channelAinda não há avaliações
- TD Révision Cinematique Du SolideDocumento8 páginasTD Révision Cinematique Du SolideRomain MarroAinda não há avaliações
- TD Cinématique CHARIOT FILOGUIDEDocumento4 páginasTD Cinématique CHARIOT FILOGUIDELamia Achour Ep Zanned100% (3)
- 2011 2012 MP TD Theorie Des MecanismesDocumento4 páginas2011 2012 MP TD Theorie Des MecanismesJaouad El50% (4)
- Exercices Cinmatique Trajectoires Camion Benne Chariot Portuaire CorrigDocumento2 páginasExercices Cinmatique Trajectoires Camion Benne Chariot Portuaire Corrigspectrum66100% (3)
- TD11 Modele Cinematique v2 PDFDocumento4 páginasTD11 Modele Cinematique v2 PDFEdgard Adán Cieza EstelaAinda não há avaliações
- Modélisation Cinématique Des MécanismesDocumento8 páginasModélisation Cinématique Des MécanismesmounirgemAinda não há avaliações
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDocumento4 páginasTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- COURS Théorie Des Mécanismes PDFDocumento5 páginasCOURS Théorie Des Mécanismes PDFMohamed NaciriAinda não há avaliações
- TD 17 - Lois Entrée-Sortie en Position Et en VitesseDocumento7 páginasTD 17 - Lois Entrée-Sortie en Position Et en Vitessebhs channelAinda não há avaliações
- Regulateur WattDocumento2 páginasRegulateur WattAmara Neji83% (6)
- Corrigé de L'examen de SynthèseDocumento2 páginasCorrigé de L'examen de SynthèseMESSAOUI100% (3)
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocumento6 páginasTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourAinda não há avaliações
- Max PIDDocumento19 páginasMax PIDmarinmikaelAinda não há avaliações
- TD2 CDocumento1 páginaTD2 Cpaul morphyAinda não há avaliações
- TD 16 - Lois Entrée-Sortie en Position Et en VitesseDocumento6 páginasTD 16 - Lois Entrée-Sortie en Position Et en Vitessebhs channel0% (1)
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDocumento4 páginasTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
- TD 23 - Comportement Statique Des Systèmes DarorDocumento9 páginasTD 23 - Comportement Statique Des Systèmes Darorbhs channelAinda não há avaliações
- TD 24 - Comportement Statique Des SystèmesDocumento8 páginasTD 24 - Comportement Statique Des Systèmesbhs channel50% (2)
- TD Chaines de SolidesDocumento2 páginasTD Chaines de Solidessoufiane8fka100% (2)
- Exo2 - Composition Des MouvementsDocumento6 páginasExo2 - Composition Des MouvementsToufikJalalEddineAinda não há avaliações
- Mecanismes PDFDocumento34 páginasMecanismes PDFesloch50% (2)
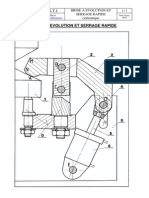
- Bride Serrage RapideDocumento3 páginasBride Serrage RapideRedaAbdraouf0% (2)
- TD Train ÉpicycloïdalDocumento5 páginasTD Train Épicycloïdalpapouch1350% (2)
- Statique Du SolideDocumento55 páginasStatique Du SolideZiko100% (1)
- Sujets de Méca Géné 2009Documento110 páginasSujets de Méca Géné 2009souheil_sou100% (4)
- Modélisation Cinématique Des MécanismesDocumento8 páginasModélisation Cinématique Des MécanismesConception & Fabrication MécaniqueAinda não há avaliações
- Cinematique GraphiqueDocumento5 páginasCinematique GraphiqueRey divino MoukouaAinda não há avaliações
- Torseur Cinematique CorrigeDocumento2 páginasTorseur Cinematique CorrigeAmal Fatouh100% (1)
- TD - Théorie Des Mécanismes Pompe À Piston Radial: CorrigéDocumento8 páginasTD - Théorie Des Mécanismes Pompe À Piston Radial: Corrigéسكينة مريم100% (2)
- Poly Théorie Des MécanismesDocumento24 páginasPoly Théorie Des MécanismesJaksMaksAinda não há avaliações
- Theorie Des Mecanismes MisDocumento42 páginasTheorie Des Mecanismes MisSemlali Zakaria100% (2)
- TD 17 Corrigé - Liaisons ÉquivalentesDocumento6 páginasTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- Transformation Des Mvts 10-11Documento4 páginasTransformation Des Mvts 10-11MIMFS100% (2)
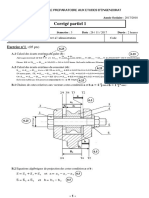
- Corrigé Partiel 1-2018Documento4 páginasCorrigé Partiel 1-2018Ramdane BoulahiaAinda não há avaliações
- 13 Statique RepDocumento15 páginas13 Statique RepRadwane Lourhmati100% (1)
- Corrigé TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocumento4 páginasCorrigé TD 19 - Lois Entrée-Sortie en Position Et en VitesseAhmed Farahidi100% (1)
- Flexion Plane SimpleDocumento20 páginasFlexion Plane SimpleMIMFS93% (14)
- Cours Cinématique 1Documento12 páginasCours Cinématique 1Mohamed NaciriAinda não há avaliações
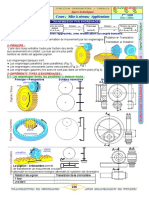
- Cours EngrenagesDocumento10 páginasCours EngrenagesmouradAinda não há avaliações
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocumento3 páginasTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyAinda não há avaliações
- Mobilite Et HyperstatismeDocumento7 páginasMobilite Et HyperstatismeFakhreddine Naimi100% (1)
- Train ÉpicycloidalDocumento3 páginasTrain ÉpicycloidalAhmed Farahidi75% (4)
- Pivot Cours 2010Documento5 páginasPivot Cours 2010walidbhy100% (1)
- TD 8Documento4 páginasTD 8Niane Møùstãphà BãssîrôūAinda não há avaliações
- Regulateur Boules Correction CINEMATIQUEDocumento6 páginasRegulateur Boules Correction CINEMATIQUEMoustapha Diagne100% (1)
- 2 Acouplements PermenantsDocumento10 páginas2 Acouplements Permenantsmejri merin0% (1)
- Schéma Cinématique - 2020Documento4 páginasSchéma Cinématique - 2020Mohsen LaabidiAinda não há avaliações
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysAinda não há avaliações
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.No EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Ainda não há avaliações
- Si TD06C MMC AcDocumento6 páginasSi TD06C MMC AcAyoubKhattabiAinda não há avaliações
- TP MDS (Version Finale)Documento17 páginasTP MDS (Version Finale)salah chegriAinda não há avaliações
- Exam 2019 20 1 1Documento9 páginasExam 2019 20 1 1laurynAinda não há avaliações
- Corrigé ccp2011 physIIDocumento5 páginasCorrigé ccp2011 physIIanon_342643568100% (5)
- Cours-Codeurs-moteurs I4811 v010 OdtDocumento6 páginasCours-Codeurs-moteurs I4811 v010 OdtBrahim AchayfadAinda não há avaliações
- DC1-E2 - Analyse Par Méthode SYSML PDFDocumento17 páginasDC1-E2 - Analyse Par Méthode SYSML PDFBrahim AchayfadAinda não há avaliações
- DC1-E2 - Analyse Par Méthode SYSML PDFDocumento17 páginasDC1-E2 - Analyse Par Méthode SYSML PDFBrahim AchayfadAinda não há avaliações
- Transmission de Puissance Mécanique: ContenuDocumento15 páginasTransmission de Puissance Mécanique: ContenuBrahim AchayfadAinda não há avaliações
- SI SMB Rtpage 2013 Corrigé PDFDocumento10 páginasSI SMB Rtpage 2013 Corrigé PDFBrahim AchayfadAinda não há avaliações
- Les Branches InfiniesDocumento2 páginasLes Branches InfiniesBessem Bhiri92% (37)
- (Sed) (CO) Systemes A Evenements DiscretsDocumento25 páginas(Sed) (CO) Systemes A Evenements DiscretskamalAinda não há avaliações
- 2013 N KkkoDocumento19 páginas2013 N Kkkositescompte4Ainda não há avaliações
- 584Documento4 páginas584Dah MañůsAinda não há avaliações
- Cours-Codeurs-moteurs I4811 v010 OdtDocumento6 páginasCours-Codeurs-moteurs I4811 v010 OdtBrahim AchayfadAinda não há avaliações
- Rouleemnts GMDocumento35 páginasRouleemnts GMBrahim AchayfadAinda não há avaliações
- Grafcet Transfert de PiecesDocumento2 páginasGrafcet Transfert de PiecesBrahim Achayfad83% (6)
- 09 Maquette Boite VitessesDocumento7 páginas09 Maquette Boite VitessesBrahim Achayfad100% (1)
- Statiqueex 2004Documento20 páginasStatiqueex 2004Maradona HassaneAinda não há avaliações
- SI1Documento14 páginasSI1Brahim AchayfadAinda não há avaliações
- Pricipaux Outils de TournageDocumento1 páginaPricipaux Outils de TournageBrahim Achayfad0% (1)
- Les Accouplements MecaniquesDocumento9 páginasLes Accouplements MecaniquesUdei SchikhauiAinda não há avaliações
- 1 PSCoursDocumento3 páginas1 PSCoursBrahim AchayfadAinda não há avaliações
- 3106 Tcs Boites A VitessesDocumento3 páginas3106 Tcs Boites A VitessesBrahim AchayfadAinda não há avaliações
- 3106 Tcs Boites A VitessesDocumento3 páginas3106 Tcs Boites A VitessesBrahim AchayfadAinda não há avaliações
- CG 20fourcheDocumento2 páginasCG 20fourcheBrahim AchayfadAinda não há avaliações
- Sec Minesponts 2006 Sic MPDocumento17 páginasSec Minesponts 2006 Sic MPBrahim AchayfadAinda não há avaliações
- Si Co08 MMC EfDocumento21 páginasSi Co08 MMC EfBrahim AchayfadAinda não há avaliações
- COURS Dessin Technique PRDocumento3 páginasCOURS Dessin Technique PRBaklouti IssaAinda não há avaliações
- Corrigé TD 11 - Comportement Cinématique Des SystèmesDocumento8 páginasCorrigé TD 11 - Comportement Cinématique Des SystèmesBrahim AchayfadAinda não há avaliações
- Energétique EDocumento8 páginasEnergétique EBrahim AchayfadAinda não há avaliações
- Élements FinisDocumento11 páginasÉlements FinisBrahim AchayfadAinda não há avaliações
- Methodes Des Éléments FinisDocumento36 páginasMethodes Des Éléments FinisBrahim Achayfad100% (2)
- 5194 Epreuve E5 Bts Ip Europlastic Juin 2013 SujetDocumento28 páginas5194 Epreuve E5 Bts Ip Europlastic Juin 2013 SujetAnonymous rvGgpvvqAinda não há avaliações
- Applications Types:: Buses À Jet Plat À Gamme Étendue D'utilisationsDocumento1 páginaApplications Types:: Buses À Jet Plat À Gamme Étendue D'utilisationsQuentin MerelAinda não há avaliações
- Catalogue 2013 LGDocumento44 páginasCatalogue 2013 LGLGAlgerieAinda não há avaliações
- ProjetDocumento25 páginasProjetThe Artist YassineAinda não há avaliações
- LaboSystem 2016 FrenchDocumento12 páginasLaboSystem 2016 Frenchmohamed.mehouchi1210Ainda não há avaliações
- Chapitre 4 Dynamique Fluide IdéalDocumento37 páginasChapitre 4 Dynamique Fluide IdéalNowe AhmadeAinda não há avaliações
- Pièces Détachées en Vue Éclatée Pour POMPE COMET APS 51-APS61-APS71Documento5 páginasPièces Détachées en Vue Éclatée Pour POMPE COMET APS 51-APS61-APS71sou chAinda não há avaliações
- Corrigé Fiche RecursivitéDocumento5 páginasCorrigé Fiche Recursivitébassirou kaneAinda não há avaliações
- MDF CHAP 1 Introduction A La MDFDocumento25 páginasMDF CHAP 1 Introduction A La MDFSofianeMerkacheAinda não há avaliações
- Pul Jet PlatDocumento3 páginasPul Jet PlatLenos LenosAinda não há avaliações
- Tutoriel Renault Ddt2000 - Lecture Et Effacement Des DTCDocumento14 páginasTutoriel Renault Ddt2000 - Lecture Et Effacement Des DTCNacer MezghicheAinda não há avaliações
- PDF PDFDocumento100 páginasPDF PDFAbdou Kaci-selamAinda não há avaliações
- Manuel D'exploitationDocumento78 páginasManuel D'exploitationlamri adamAinda não há avaliações
- TP 1 MDFDocumento4 páginasTP 1 MDFLili LerougeAinda não há avaliações
- FD CR 13445-7Documento26 páginasFD CR 13445-7Thomas Valo100% (1)
- TP EtorqueDocumento27 páginasTP EtorqueNidal BestAinda não há avaliações
- Edf Guide Technique Piscine PubliqueDocumento44 páginasEdf Guide Technique Piscine PubliqueMaestro Abdellah100% (2)
- EhzzfqDocumento5 páginasEhzzfqAmada TarekAinda não há avaliações
- Chapitre 5 Dynamique Fluide RéelDocumento29 páginasChapitre 5 Dynamique Fluide RéelNowe AhmadeAinda não há avaliações
- 1 - ITIL V3 - Intro Et Pratique v1.23Documento35 páginas1 - ITIL V3 - Intro Et Pratique v1.23mekkouk9100% (3)
- VérinDocumento7 páginasVérinnelson libalaAinda não há avaliações
- IROKODocumento4 páginasIROKOFabrice KouakouAinda não há avaliações
- Dtu 60.11Documento69 páginasDtu 60.11fav fd100% (3)
- Decouverte Des Bascules Sous ProteusDocumento10 páginasDecouverte Des Bascules Sous ProteusDaniel KoffiAinda não há avaliações
- Les Réseaux Sociaux Et Les Sites de PartageDocumento45 páginasLes Réseaux Sociaux Et Les Sites de Partagegrolimur100% (1)
- Fiche TD 2 OODocumento2 páginasFiche TD 2 OOMamadou Moustapha NdiayeAinda não há avaliações
- Etude Hydrogeologique de Laquifere Liasique Du CoDocumento19 páginasEtude Hydrogeologique de Laquifere Liasique Du CoOum NadirAinda não há avaliações
- These SaadDocumento258 páginasThese SaadFoudilYouyouAinda não há avaliações
- Pose, Cimentation D'une Colonne de Tubage Et Calcul de Cimentation. Cas Du Forage Debidibi - El HadjiraDocumento71 páginasPose, Cimentation D'une Colonne de Tubage Et Calcul de Cimentation. Cas Du Forage Debidibi - El HadjiraSA FAAinda não há avaliações
- Geometrie de Outil de CoupeDocumento19 páginasGeometrie de Outil de CoupeAbdelmoghit IdhsaineAinda não há avaliações