Você também pode gostar
- Scottish Myths and Legends (PDFDrive)Documento181 páginasScottish Myths and Legends (PDFDrive)VeraAinda não há avaliações
- Induction MotorDocumento27 páginasInduction MotorNandhini SaranathanAinda não há avaliações
- Trinity The Father, The Son and The Holy SpiritDocumento3 páginasTrinity The Father, The Son and The Holy SpiritThomas Lorenz (Fit For Faith Ministries)100% (1)
- Motor Winding ProcedureDocumento25 páginasMotor Winding Procedureutility supplyAinda não há avaliações
- AC Induction Motor FundamentalsDocumento24 páginasAC Induction Motor Fundamentalsrohtahir100% (3)
- Body Repairs - General Body RepairsDocumento49 páginasBody Repairs - General Body RepairsjomialheAinda não há avaliações
- Service Manual Tosoh Aia360Documento4 páginasService Manual Tosoh Aia360OmerAinda não há avaliações
- Advanced Space Propulsion Based On VacuumDocumento17 páginasAdvanced Space Propulsion Based On VacuumMystery Wire100% (1)
- A New System of Alternating Current Motors and TransformersNo EverandA New System of Alternating Current Motors and TransformersNota: 1 de 5 estrelas1/5 (1)
- California Law of Perscriptive EasementsDocumento3 páginasCalifornia Law of Perscriptive EasementsSylvester MooreAinda não há avaliações
- Ch7 Induction MotorDocumento82 páginasCh7 Induction MotorMuhammad R ShihadehAinda não há avaliações
- 3.10.1.3 Motor Damage Curve: Electrical Design CalculationDocumento12 páginas3.10.1.3 Motor Damage Curve: Electrical Design Calculationjimmy_barredoAinda não há avaliações
- Unit 6 Alternator (Synchronous Generator) : StructureDocumento29 páginasUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Single Phase Induction MotorDocumento7 páginasSingle Phase Induction MotorReeta Dutta100% (1)
- 8MS Three-Phase Synchronous MotorsDocumento163 páginas8MS Three-Phase Synchronous MotorsrrrAinda não há avaliações
- Electronic Engineering Applications of Two–Port Networks: Applied Electricity and Electronics DivisionNo EverandElectronic Engineering Applications of Two–Port Networks: Applied Electricity and Electronics DivisionAinda não há avaliações
- No Load and Blocked Rotor TestDocumento19 páginasNo Load and Blocked Rotor Testsupere100% (4)
- Variable Frequency Drive : Ravikumar .M M.Tech 3 SEM C.A.I.DDocumento22 páginasVariable Frequency Drive : Ravikumar .M M.Tech 3 SEM C.A.I.Davi013Ainda não há avaliações
- Promotional Tools Lesson PlanDocumento6 páginasPromotional Tools Lesson PlanNemcris Mae Ople100% (1)
- Chapter 18 Metric and Imperial Measures: Scheme of WorkDocumento2 páginasChapter 18 Metric and Imperial Measures: Scheme of WorkrightwayAinda não há avaliações
- Desktop & Technical Support Interview Questions and AnswersDocumento64 páginasDesktop & Technical Support Interview Questions and Answersvinaaypalkar80% (46)
- Unit2 MachinesDocumento35 páginasUnit2 MachinesdineshkumarAinda não há avaliações
- Improved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)No EverandImproved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)Ainda não há avaliações
- Module3 - Induction MotorDocumento45 páginasModule3 - Induction MotorRevki 'Exiit'Ainda não há avaliações
- Ad3na0ab (COMBI NACCO-ing)Documento30 páginasAd3na0ab (COMBI NACCO-ing)Kaique MelloAinda não há avaliações
- Cold SandwichesDocumento7 páginasCold SandwichesLea Galano ManarpaacAinda não há avaliações
- Construction of Machine PDFDocumento110 páginasConstruction of Machine PDFAvinash SinghAinda não há avaliações
- Induction Generator Theory and ApplicationDocumento8 páginasInduction Generator Theory and ApplicationDiego Nicolás López-RamírezAinda não há avaliações
- Three Phase Induction Motor 93138541001Documento63 páginasThree Phase Induction Motor 93138541001Mce RegAinda não há avaliações
- Reluctance MotorDocumento16 páginasReluctance Motorapi-382713280% (5)
- DC Motors, Speed Controls, Servo Systems: An Engineering HandbookNo EverandDC Motors, Speed Controls, Servo Systems: An Engineering HandbookNota: 5 de 5 estrelas5/5 (3)
- Electrostatic Stress Analysis of High Voltage CablesDocumento4 páginasElectrostatic Stress Analysis of High Voltage CablesesatjournalsAinda não há avaliações
- Three Phase Induction MotorDocumento11 páginasThree Phase Induction MotorMohamed Ashraf Abd Elaazem Ali ٢٠١٥٠١٣٨٣Ainda não há avaliações
- A Will Eternal - Book 1Documento1.295 páginasA Will Eternal - Book 1Hitsuin Movies100% (1)
- Squirrel Cage Induction MotorDocumento57 páginasSquirrel Cage Induction MotorJosue' Gonzalez100% (1)
- Rotating Machinery Reliability for Technicians and EngineersNo EverandRotating Machinery Reliability for Technicians and EngineersAinda não há avaliações
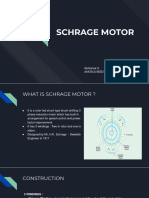
- Schrage MotorsDocumento10 páginasSchrage MotorsAbhishek O100% (2)
- Electric Machinery FundamentalsDocumento6 páginasElectric Machinery FundamentalsKashyap Dubey0% (1)
- Construction of Three Phase Induction MotorDocumento6 páginasConstruction of Three Phase Induction MotorMuhammadZaydArattKhanAinda não há avaliações
- 3 Phase Induction Motor ReportDocumento5 páginas3 Phase Induction Motor ReportOPIYO ONYANGO100% (3)
- Single Phase Induction MotorDocumento5 páginasSingle Phase Induction MotorSridhar SridharAinda não há avaliações
- EquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction MotorDocumento13 páginasEquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction Motoraili_avinashAinda não há avaliações
- Induction MotorDocumento11 páginasInduction MotorMsKarolyAinda não há avaliações
- DC Machine Experiments ManualDocumento25 páginasDC Machine Experiments ManualTumzangwanaAinda não há avaliações
- Difference Between Single Phase Wiring and Three Phase (Latest)Documento14 páginasDifference Between Single Phase Wiring and Three Phase (Latest)shumwenjunAinda não há avaliações
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyDocumento13 páginasIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimAinda não há avaliações
- PMBLDC Motor DriveDocumento55 páginasPMBLDC Motor DriveSushant SinghAinda não há avaliações
- Motor WindingsDocumento12 páginasMotor WindingsAbiodun IloriAinda não há avaliações
- Electrical Machine ApplicationsDocumento9 páginasElectrical Machine Applicationssmile4ever54100% (34)
- Synchronous Motor DrivesDocumento17 páginasSynchronous Motor DrivessidharthAinda não há avaliações
- EXPERIMENT Induction MotorDocumento10 páginasEXPERIMENT Induction MotorMohamed Meeran100% (1)
- Three Phase Induction - MotorDocumento52 páginasThree Phase Induction - MotorAdityaAinda não há avaliações
- Variable Speed Drive - IntroductionDocumento6 páginasVariable Speed Drive - Introductionawhk2006Ainda não há avaliações
- Zener DiodeDocumento6 páginasZener DiodeKumar shantanu BasakAinda não há avaliações
- MOTORING AND GENERATING MODE OF 3-Φ INDUCTION MACHINE - A COMPARATIVE EVALUATION FOR ENERGY EFFICIENCY PDFDocumento64 páginasMOTORING AND GENERATING MODE OF 3-Φ INDUCTION MACHINE - A COMPARATIVE EVALUATION FOR ENERGY EFFICIENCY PDFIjabi0% (1)
- Three Phase Synchronous MachinesDocumento14 páginasThree Phase Synchronous MachinesMohdFirdausAinda não há avaliações
- DC MotorsDocumento33 páginasDC MotorsVikram SanthoshAinda não há avaliações
- Ac Series MotorDocumento15 páginasAc Series MotorMani Balaji TAinda não há avaliações
- VVVF DrivesDocumento16 páginasVVVF DrivesIsradani MjAinda não há avaliações
- Motor Temperature Ratings: DefinitionsDocumento4 páginasMotor Temperature Ratings: DefinitionstekhakkoAinda não há avaliações
- Electrical Machine Design SOLVED PROBLEMS ON DC MACHINE MAGNETIC CIRCUIT Continuation of Chapter PDFDocumento14 páginasElectrical Machine Design SOLVED PROBLEMS ON DC MACHINE MAGNETIC CIRCUIT Continuation of Chapter PDFMahesh MohananAinda não há avaliações
- Lap Vs ConcentricDocumento7 páginasLap Vs ConcentricAmr Diaa El-Din El-FawalAinda não há avaliações
- of SRMDocumento22 páginasof SRMGopoji Dayanand71% (7)
- Position SelsynDocumento2 páginasPosition SelsynPrashil RandiveAinda não há avaliações
- Induction Machine Chapter No 7Documento57 páginasInduction Machine Chapter No 7bhaktameltAinda não há avaliações
- Asynchronous MachinesDocumento34 páginasAsynchronous MachinesAndi FalihAinda não há avaliações
- Chapter # 7 Induction Motor: Week # 14, Lecture 40Documento12 páginasChapter # 7 Induction Motor: Week # 14, Lecture 40Horaira Zulfiqar AbbasiAinda não há avaliações
- Chapter # 7 Induction Motor: Week # 14, Lecture 40Documento12 páginasChapter # 7 Induction Motor: Week # 14, Lecture 40Horaira Zulfiqar AbbasiAinda não há avaliações
- Chuong 3 - Dieu Khien Toc Do Dong Co KDBDocumento55 páginasChuong 3 - Dieu Khien Toc Do Dong Co KDBThiên HảiAinda não há avaliações
- Polyphase Induction Machines: Principle of OperationDocumento10 páginasPolyphase Induction Machines: Principle of OperationPrakash KumarAinda não há avaliações
- Polyphase Induction MachinesDocumento7 páginasPolyphase Induction Machinespurushg62Ainda não há avaliações
- CH 3 - Induction MotorsDocumento46 páginasCH 3 - Induction MotorsMiz AelyfhaAinda não há avaliações
- DSP TMS Series Processor and MOTOR ControlDocumento28 páginasDSP TMS Series Processor and MOTOR Controlavi013Ainda não há avaliações
- Y Axb Yax BXC: BX B y Ae AxDocumento83 páginasY Axb Yax BXC: BX B y Ae AxSivapriyan RajendranAinda não há avaliações
- LAB View Training BrochureDocumento10 páginasLAB View Training BrochureJatin Ⓥ SarvaiyaAinda não há avaliações
- 6 Analysis and Design of An OffshoreDocumento10 páginas6 Analysis and Design of An OffshoreJaga TheesanAinda não há avaliações
- r09 Power System DynamicsDocumento1 páginar09 Power System Dynamicsavi013Ainda não há avaliações
- 1516Documento6 páginas1516avi013Ainda não há avaliações
- RISC vs. CISCDocumento10 páginasRISC vs. CISCavi013Ainda não há avaliações
- 3.2 Electric Motors - Revised (Table Format)Documento8 páginas3.2 Electric Motors - Revised (Table Format)Sumit AgrawalAinda não há avaliações
- Y Axb Yax BXC: BX B y Ae AxDocumento83 páginasY Axb Yax BXC: BX B y Ae AxSivapriyan RajendranAinda não há avaliações
- CH 20Documento27 páginasCH 20avi013Ainda não há avaliações
- Basic Home ApplianceDocumento17 páginasBasic Home Applianceavi013Ainda não há avaliações
- High Performance Drive Systems - . - . - . .Documento8 páginasHigh Performance Drive Systems - . - . - . .avi013Ainda não há avaliações
- DSP TMS Series Processor and MOTOR ControlDocumento28 páginasDSP TMS Series Processor and MOTOR Controlavi013Ainda não há avaliações
- APPELANTDocumento30 páginasAPPELANTTAS MUNAinda não há avaliações
- Commonwealth Essay Competition 2014Documento2 páginasCommonwealth Essay Competition 2014q998Ainda não há avaliações
- Social Media As An Effective Tool To Promote BusinessDocumento5 páginasSocial Media As An Effective Tool To Promote BusinessHannah Gwyneth BalaAinda não há avaliações
- Ageing Baby BoomersDocumento118 páginasAgeing Baby Boomersstephloh100% (1)
- Review of DMOS in CNHSDocumento54 páginasReview of DMOS in CNHSrhowee onaganAinda não há avaliações
- A Multivariate Model For Analyzing Crime Scene InformationDocumento26 páginasA Multivariate Model For Analyzing Crime Scene InformationNorberth Ioan OkrosAinda não há avaliações
- The Oxford Handbook of The Trinity (Introducción)Documento12 páginasThe Oxford Handbook of The Trinity (Introducción)casandraentroya100% (1)
- Test 4Documento8 páginasTest 4Phương AnhAinda não há avaliações
- Art Analysis Ap EuroDocumento5 páginasArt Analysis Ap Euroapi-269743889Ainda não há avaliações
- Krok 1 Stomatology: Test Items For Licensing ExaminationDocumento28 páginasKrok 1 Stomatology: Test Items For Licensing ExaminationhelloAinda não há avaliações
- MC DuroDesign EDocumento8 páginasMC DuroDesign Epetronela.12Ainda não há avaliações
- Samsung Galaxy Beam GT I8530 User ManualDocumento172 páginasSamsung Galaxy Beam GT I8530 User ManualFirdaus AhmadAinda não há avaliações
- Npcih IDocumento2 páginasNpcih IRoYaL RaJpOoTAinda não há avaliações
- Toefl Exercise 1Documento9 páginasToefl Exercise 1metaAinda não há avaliações
- Sri Nikunja-Keli-VirudavaliDocumento12 páginasSri Nikunja-Keli-VirudavaliIronChavesAinda não há avaliações
- Map of Jeju: For Muslim TouristsDocumento7 páginasMap of Jeju: For Muslim TouristslukmannyeoAinda não há avaliações
- Digital Marketing - Scope Opportunities and Challenges - IntechOpen PDFDocumento31 páginasDigital Marketing - Scope Opportunities and Challenges - IntechOpen PDFPratsAinda não há avaliações
- Inside The Mind of A Master ProcrastinatorDocumento5 páginasInside The Mind of A Master ProcrastinatorDianaAinda não há avaliações
- Adult Patient InformationDocumento1 páginaAdult Patient Informationapi-521417613Ainda não há avaliações