Você também pode gostar
- Diagramas y Polifonías. Experiencias de PensamientoNo EverandDiagramas y Polifonías. Experiencias de PensamientoAinda não há avaliações
- 1 Teorema de CastiglianoDocumento5 páginas1 Teorema de CastiglianoAndherson Alexander SeminarioAinda não há avaliações
- CH16Documento39 páginasCH16Molina GabrielaAinda não há avaliações
- Problemas Cinematica Del Cuerpo RigidoDocumento13 páginasProblemas Cinematica Del Cuerpo RigidoJossy H AtocheAinda não há avaliações
- Clase 1 - Conceptos Basicos de Resistencia de MaterialesDocumento16 páginasClase 1 - Conceptos Basicos de Resistencia de MaterialesJosé Palma LedesmaAinda não há avaliações
- Ley de Hokke - Ecuaciones DiferencialesDocumento11 páginasLey de Hokke - Ecuaciones DiferencialesAdrian OmañaAinda não há avaliações
- Silabo MB 155 Ecuaciones Diferenciales 2020Documento6 páginasSilabo MB 155 Ecuaciones Diferenciales 2020Ronaldcito Eduardo Portocarrero HoyoAinda não há avaliações
- Equilibrio de Una Partícula en El EspacioDocumento9 páginasEquilibrio de Una Partícula en El EspacioGinger BravoAinda não há avaliações
- Equilibrio de Una Particula en El EspacioDocumento7 páginasEquilibrio de Una Particula en El EspacioCristhian TumeAinda não há avaliações
- FLUIDOESTÁTICADocumento76 páginasFLUIDOESTÁTICAjuanAinda não há avaliações
- Solucionario de Exmane de Recuperacion de Mecanica de MaterialesDocumento7 páginasSolucionario de Exmane de Recuperacion de Mecanica de MaterialesEdwin A. Juarez MarchenaAinda não há avaliações
- Sistema de Referencia No InercialDocumento7 páginasSistema de Referencia No Inercialorodri45Ainda não há avaliações
- Semana1 - 1 Fisica2Documento36 páginasSemana1 - 1 Fisica2Miranda Becerra JoseAinda não há avaliações
- Unidad 5 Dinamica Parte 1 PDFDocumento33 páginasUnidad 5 Dinamica Parte 1 PDFVictor Hugo Tavira UrbinaAinda não há avaliações
- 06 - Ejercitario - Flexión - Simple - MM1 - Tension NormalDocumento3 páginas06 - Ejercitario - Flexión - Simple - MM1 - Tension NormalJuan Carlos CarrilloAinda não há avaliações
- Ejercicios de Sistemas Vibratorios Con y Sin AmortiguaciónDocumento4 páginasEjercicios de Sistemas Vibratorios Con y Sin AmortiguaciónJosé Alejandro Vargas0% (1)
- Problemas de Estática. J. MartínDocumento2 páginasProblemas de Estática. J. MartínMARCELO DAVID MUÑOZ CHECA100% (1)
- Taller 4.1 Trabajo y Energía PDFDocumento1 páginaTaller 4.1 Trabajo y Energía PDFAnaMilenaNobleAinda não há avaliações
- Formas Funcionales de Los Coeficientes de Friccion y de ConveccionDocumento6 páginasFormas Funcionales de Los Coeficientes de Friccion y de ConveccionJonathan Javier Salazar ValladaresAinda não há avaliações
- Problema de FlexionDocumento3 páginasProblema de Flexiongean marco arcos quispeAinda não há avaliações
- Proyecto GiroscopioDocumento6 páginasProyecto GiroscopioMario RamirezAinda não há avaliações
- Semana 01sesin 02propiedades MecanicasDocumento57 páginasSemana 01sesin 02propiedades MecanicasFernando LázaroAinda não há avaliações
- Parcial 4 Yoander NavarroDocumento23 páginasParcial 4 Yoander NavarroYoander NavarroAinda não há avaliações
- NewtonDocumento3 páginasNewtonesgom819Ainda não há avaliações
- Diagrama de Moody PDFDocumento1 páginaDiagrama de Moody PDFLeonela RodríguezAinda não há avaliações
- Mecanica Fluidos Cap08Documento55 páginasMecanica Fluidos Cap08Abraham Shardin MesiaAinda não há avaliações
- Laboratorio 3 Equilibrio de Cuerpos RigidosDocumento5 páginasLaboratorio 3 Equilibrio de Cuerpos RigidosKevin GuerraAinda não há avaliações
- Corrientenm, S Con Superficie Libre y ForzadaDocumento6 páginasCorrientenm, S Con Superficie Libre y ForzadaLizbeth SanchezAinda não há avaliações
- Talleres de Física Diver Jesus Janer FavianDocumento28 páginasTalleres de Física Diver Jesus Janer FavianDiver LopezAinda não há avaliações
- Investigacion Razones de Cambio.Documento10 páginasInvestigacion Razones de Cambio.Mr. FlipoAinda não há avaliações
- FormularioDocumento12 páginasFormularioJasiel HERNANDEZ SANCHEZAinda não há avaliações
- Diapos ConcentracionDocumento25 páginasDiapos ConcentracionYeickoAlexanderGabrielCurseAinda não há avaliações
- Cinética Del Cuerpo Rígido FinalDocumento37 páginasCinética Del Cuerpo Rígido FinalYatniel BjAinda não há avaliações
- Viraciones LibresDocumento24 páginasViraciones Libresjorge espinozaAinda não há avaliações
- Laboratorio # 1 DinamicaDocumento17 páginasLaboratorio # 1 DinamicaReinaldo Pineda50% (2)
- Problemas ElasticidadDocumento2 páginasProblemas ElasticidadJheferson Villazon CAinda não há avaliações
- Informe de Laboratorio de FISICAII Resonancia MecánicaDocumento15 páginasInforme de Laboratorio de FISICAII Resonancia MecánicaOscaric25Ainda não há avaliações
- 2 Coordenadas Cilíndricas, Mov Relativo y Mov DependienteDocumento11 páginas2 Coordenadas Cilíndricas, Mov Relativo y Mov DependienteJoseC.LeonAinda não há avaliações
- Ejercicios y Teoría de InerciaDocumento4 páginasEjercicios y Teoría de InerciaSteppenWolf100% (1)
- Se Puede Medir Directamente El Campo EléctricoDocumento2 páginasSe Puede Medir Directamente El Campo Eléctricojair eduardo mendez gonzales100% (2)
- Dinamica Sistema de ParticulasDocumento8 páginasDinamica Sistema de ParticulasHamed Farid Hamzi HurtadoAinda não há avaliações
- Trabajo Practico Ingeniería de MaterialesDocumento14 páginasTrabajo Practico Ingeniería de Materialesvincent leeAinda não há avaliações
- Fuerza FicticiaDocumento5 páginasFuerza Ficticiaorodri45Ainda não há avaliações
- Cinetica y EquilibrioDocumento13 páginasCinetica y EquilibrioIgnacio AcuñaAinda não há avaliações
- Propiedades Elásticas de Los MaterialesDocumento11 páginasPropiedades Elásticas de Los MaterialesCarlos Piña100% (1)
- Examen DE ESTATICADocumento7 páginasExamen DE ESTATICApaul0% (1)
- Teoría de La Máxima Deformación Específica PrincipalDocumento1 páginaTeoría de La Máxima Deformación Específica PrincipalManuel OrtizAinda não há avaliações
- Ejercicios de Deformacion SimpleDocumento2 páginasEjercicios de Deformacion SimpleSandra100% (1)
- Cinemática Del Sólido RígidoDocumento12 páginasCinemática Del Sólido RígidoLUIS MANUEL VELAZQUEZ HERNANDEZ100% (1)
- FISICADocumento2 páginasFISICAMarco PilcoAinda não há avaliações
- Métodos EnergeticosDocumento10 páginasMétodos EnergeticoscealbruceAinda não há avaliações
- Ejemplos de EstáticaDocumento42 páginasEjemplos de EstáticaRene Carlos Medina Quezada100% (5)
- Dinamica CinematicaDocumento20 páginasDinamica Cinematicajorge espinozaAinda não há avaliações
- Cantidad Calor para IngºDocumento42 páginasCantidad Calor para Ingºbrayer100% (1)
- Momento de InerciaDocumento15 páginasMomento de InerciaJoao E. Mendoza GonzalesAinda não há avaliações
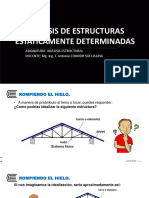
- 03 Análisis Estructuras Estáticamente DeterminadaDocumento42 páginas03 Análisis Estructuras Estáticamente DeterminadaACTIVIDAD CAFE ZONA NORTEAinda não há avaliações
- 04 y 05 - EquilibrioDocumento22 páginas04 y 05 - EquilibriopercyAinda não há avaliações
- Potencia de Un MotorDocumento29 páginasPotencia de Un MotorJHAN FREDDY PAUCAR RAMOSAinda não há avaliações
- Dinamica PDFDocumento12 páginasDinamica PDFPablo RenteriaAinda não há avaliações
- Análisis y Comprensión de Materiales BibliográficosDocumento11 páginasAnálisis y Comprensión de Materiales BibliográficosRoberth David Pinoargote ZambranoAinda não há avaliações
- RESUMEN-EJECUTIVO Obras de Drenaje Mayor UrbanoDocumento7 páginasRESUMEN-EJECUTIVO Obras de Drenaje Mayor UrbanoFrank VenturaAinda não há avaliações
- Botanica Informe 1Documento5 páginasBotanica Informe 1Frank VenturaAinda não há avaliações
- Botanica Informe 1Documento5 páginasBotanica Informe 1Frank VenturaAinda não há avaliações
- Origen de La AgriculturaDocumento10 páginasOrigen de La AgriculturaFrank VenturaAinda não há avaliações
- ALGODON AgronomiaDocumento3 páginasALGODON AgronomiaFrank VenturaAinda não há avaliações
- Triptico de MaquillajeDocumento3 páginasTriptico de MaquillajeFrank VenturaAinda não há avaliações
- Uni Fim Mc338 Grupo8 Trabajo 4 Ver3Documento11 páginasUni Fim Mc338 Grupo8 Trabajo 4 Ver3Juan Jose MF100% (1)
- Fisica 3 Dinamica y CinematicaDocumento27 páginasFisica 3 Dinamica y CinematicaDany CamposAinda não há avaliações
- Folletos de Practicas de BachilleratoDocumento113 páginasFolletos de Practicas de BachilleratoMelissa CórdobaAinda não há avaliações
- Movimiento ParabolicoDocumento7 páginasMovimiento ParabolicoDavid SimbañaAinda não há avaliações
- Formulario MASDocumento1 páginaFormulario MASJaime Nomo GonzalezAinda não há avaliações
- DinámicaDocumento2 páginasDinámicaAndersson De La CruzAinda não há avaliações
- Fuerza y Movimiento (Tarea de Física)Documento6 páginasFuerza y Movimiento (Tarea de Física)ArcangelAinda não há avaliações
- Vacaciones 4 e SoDocumento37 páginasVacaciones 4 e SoCarlos García GilAinda não há avaliações
- Guia N3 Fis 1Documento2 páginasGuia N3 Fis 1Pablo Andres Hernandez RodriguezAinda não há avaliações
- Repaso FIsicaDocumento12 páginasRepaso FIsicaJhin DateAinda não há avaliações
- Problema 02Documento4 páginasProblema 02carlos enriqueAinda não há avaliações
- Dinamica CircularDocumento20 páginasDinamica Circularwibo20Ainda não há avaliações
- Lab 10 - Choque Elastico Entre Dos CuerposDocumento5 páginasLab 10 - Choque Elastico Entre Dos Cuerposajgri209100% (1)
- Unidad 3 CinemáticaDocumento17 páginasUnidad 3 CinemáticaMaria Camino LoliAinda não há avaliações
- S01.s1 - Fundamentos de Dinamica - UA01-Parte 01Documento9 páginasS01.s1 - Fundamentos de Dinamica - UA01-Parte 01Javier Estrella VeraAinda não há avaliações
- Experiencia 04 Fisica LaboratorioDocumento15 páginasExperiencia 04 Fisica LaboratorioSilvana PalaciosAinda não há avaliações
- Solucionario Guía Práctica IV Movimiento Energía y CalorDocumento6 páginasSolucionario Guía Práctica IV Movimiento Energía y CalorlauraAinda não há avaliações
- Accidentologia VialDocumento4 páginasAccidentologia VialDaniel Santiago Estermann100% (1)
- UntitledDocumento9 páginasUntitledMarcoAinda não há avaliações
- Taller - Quiz de VectoresDocumento2 páginasTaller - Quiz de VectoresBotero :3Ainda não há avaliações
- Proyecto Montaña RusaDocumento11 páginasProyecto Montaña Rusachristianlenny100% (1)
- Fuerzas y DCLDocumento6 páginasFuerzas y DCLJhony OrtizAinda não há avaliações
- Tercer Exámen de Física Enero 2010Documento3 páginasTercer Exámen de Física Enero 2010Marcos Murcia PomaresAinda não há avaliações
- TemarioDocumento5 páginasTemarioyuverAinda não há avaliações
- Anexo 1 Ejercicios Tarea 2 Grupo 151Documento34 páginasAnexo 1 Ejercicios Tarea 2 Grupo 151Geraldine VargasAinda não há avaliações
- Lab01 - Cinemática Partícula 2021-llDocumento21 páginasLab01 - Cinemática Partícula 2021-llJose Antonio Arroyo AlaniaAinda não há avaliações
- Lectura 2 - Dinámica y Caída Libre de Los Cuerpos - TrabajoDocumento25 páginasLectura 2 - Dinámica y Caída Libre de Los Cuerpos - TrabajoAriel FernandezAinda não há avaliações
- Cinetica de La ParticulaDocumento14 páginasCinetica de La ParticulaMiguel EncinasAinda não há avaliações
- S03.s2 CAF1Documento15 páginasS03.s2 CAF1Erik victor Anchivilca ZavaletaAinda não há avaliações
- Brazo RoboticoDocumento3 páginasBrazo RoboticoEduardo MongeAinda não há avaliações