Você também pode gostar
- 1 3 1 A Vex Solarhydrogensystem PlainDocumento7 páginas1 3 1 A Vex Solarhydrogensystem Plainapi-264642523100% (1)
- Energy SourceDocumento4 páginasEnergy Sourceapi-264092079Ainda não há avaliações
- Final Calculations - For MergeDocumento2 páginasFinal Calculations - For Mergeapi-264092079Ainda não há avaliações
- Research DocumentationDocumento2 páginasResearch Documentationapi-264092079Ainda não há avaliações
- DrawingsarmDocumento1 páginaDrawingsarmapi-264092079Ainda não há avaliações
- Pre Eng ProcessDocumento1 páginaPre Eng Processapi-264092079Ainda não há avaliações
- Design Brief Comp MachDocumento1 páginaDesign Brief Comp Machapi-264092079Ainda não há avaliações
- Decision Matrix For MinionDocumento1 páginaDecision Matrix For Minionapi-264092079Ainda não há avaliações
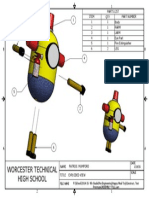
- Assembly Full-1Documento1 páginaAssembly Full-1api-264092079Ainda não há avaliações
- Decision Matrix For AccessoryDocumento1 páginaDecision Matrix For Accessoryapi-264092079Ainda não há avaliações
- Worcester Technical High School: Date 1/19/15Documento1 páginaWorcester Technical High School: Date 1/19/15api-264092079Ainda não há avaliações
- Fire ExtinguisherDocumento1 páginaFire Extinguisherapi-264092079Ainda não há avaliações
- t9 Front-1Documento1 páginat9 Front-1api-264092079Ainda não há avaliações
- Design BriefDocumento1 páginaDesign Briefapi-264098585Ainda não há avaliações
- DrawingsexpDocumento1 páginaDrawingsexpapi-264092079Ainda não há avaliações
- Track StraightDocumento1 páginaTrack Straightapi-264092079Ainda não há avaliações
- DrawingsbodyDocumento1 páginaDrawingsbodyapi-264092079Ainda não há avaliações
- Group NormsDocumento1 páginaGroup Normsapi-264092079Ainda não há avaliações
- Group NormsDocumento1 páginaGroup Normsapi-264092079Ainda não há avaliações
- t9 TrailerDocumento1 páginat9 Trailerapi-264092079Ainda não há avaliações
- t9 BedDocumento1 páginat9 Bedapi-264092079Ainda não há avaliações
- t9 TrailerhitchDocumento1 páginat9 Trailerhitchapi-264092079Ainda não há avaliações
- DecisionmatrixDocumento1 páginaDecisionmatrixapi-264092079Ainda não há avaliações
- DesignbrieftemplateDocumento1 páginaDesignbrieftemplateapi-264092079Ainda não há avaliações
- Brainstorming IdeasDocumento1 páginaBrainstorming Ideasapi-264092079Ainda não há avaliações
- Trainassembly 2 ExplDocumento1 páginaTrainassembly 2 Explapi-264092079Ainda não há avaliações
- Gantt ChartDocumento1 páginaGantt Chartapi-264092079Ainda não há avaliações
- Die Kuh CatcherDocumento1 páginaDie Kuh Catcherapi-264092079Ainda não há avaliações
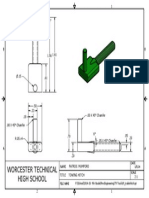
- Linkage ArmDocumento1 páginaLinkage Armapi-264092079Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Ultra-Long-Term Reliable Encapsulation Using An atDocumento13 páginasUltra-Long-Term Reliable Encapsulation Using An atdiode kcAinda não há avaliações
- Sop For Image ProcessingDocumento5 páginasSop For Image ProcessingLOKESHWARA REDDYAinda não há avaliações
- Electrical Part ListDocumento6 páginasElectrical Part ListdachajiAinda não há avaliações
- New Connection BL FormDocumento2 páginasNew Connection BL Formas sAinda não há avaliações
- Compatilidad SIMPLEXDocumento8 páginasCompatilidad SIMPLEXcchristtAinda não há avaliações
- Circuits 1 IntroductionDocumento41 páginasCircuits 1 IntroductionKim OpenaAinda não há avaliações
- MODBUS TABLES - V 153.769Documento82 páginasMODBUS TABLES - V 153.769João MatosAinda não há avaliações
- D Universal Range: KCUAA2Dpm KCHDDPM KCK66Dpm KcuabdpmDocumento3 páginasD Universal Range: KCUAA2Dpm KCHDDPM KCK66Dpm Kcuabdpmadnene gharssallahAinda não há avaliações
- DR Beck Insulating VarnishDocumento6 páginasDR Beck Insulating VarnishAnonymous HtYWpEtXGzAinda não há avaliações
- EWSD OverviewDocumento39 páginasEWSD OverviewravitejakumarAinda não há avaliações
- Traffic Light Controller Using 8085 MicroprocessorDocumento4 páginasTraffic Light Controller Using 8085 Microprocessordabaf100% (1)
- JBL - E25BT - Spec Sheet - English PDFDocumento2 páginasJBL - E25BT - Spec Sheet - English PDFMD FAISALAinda não há avaliações
- TriacDocumento2 páginasTriacRameez IrfanAinda não há avaliações
- Chapter 31Documento22 páginasChapter 31OmarWaelAinda não há avaliações
- MEAF - 66372 3 en 0801Documento87 páginasMEAF - 66372 3 en 0801Andrew Sison92% (12)
- Hammh 18 IDocumento85 páginasHammh 18 IKaiAinda não há avaliações
- Moeller Australia 2008 Industrial Trade Product GuideDocumento252 páginasMoeller Australia 2008 Industrial Trade Product GuideRadio Parts0% (1)
- UM7788 - FELib - PHA - Parameters - User - Manual - Rev.5Documento53 páginasUM7788 - FELib - PHA - Parameters - User - Manual - Rev.5ernestoAinda não há avaliações
- Service Manual KX Tgd210ag1Documento72 páginasService Manual KX Tgd210ag1DODEKAAinda não há avaliações
- G4-276 (7-18b) 48RCLB (KG6208) SpecDocumento4 páginasG4-276 (7-18b) 48RCLB (KG6208) SpecService Brags & Hayes, Inc.Ainda não há avaliações
- Front Elevation Rear Elevation: 50KVA, 3phase GensetDocumento8 páginasFront Elevation Rear Elevation: 50KVA, 3phase GensetAr Hanz Gerome SuarezAinda não há avaliações
- Allgon 7740.00Documento2 páginasAllgon 7740.00Vlad ManAinda não há avaliações
- TN2 12VDocumento5 páginasTN2 12VJavierPariAinda não há avaliações
- PHD Thesis Electrical EngineeringDocumento7 páginasPHD Thesis Electrical Engineeringehudyxbaf100% (2)
- X-10 Home Automation - ContentDocumento93 páginasX-10 Home Automation - Contentprinceofnation_21100% (1)
- Danfoss Vlt6oo Manual1Documento32 páginasDanfoss Vlt6oo Manual1OGAinda não há avaliações
- MA8692 Supplement EU MLDocumento4 páginasMA8692 Supplement EU MLMaxsilva85Ainda não há avaliações
- Chapter 1Documento80 páginasChapter 1Praveena NeppalliAinda não há avaliações
- YCMOU-AST Syllabus T24 Diploma in Mechanical EngineeringDocumento101 páginasYCMOU-AST Syllabus T24 Diploma in Mechanical Engineeringsanchu1981Ainda não há avaliações
- On Solar Updraft TowerDocumento18 páginasOn Solar Updraft TowerSunil Kumar Singh100% (1)