Você também pode gostar
- Clasificación de TensionesDocumento6 páginasClasificación de TensionesIrving VazMarAinda não há avaliações
- Motores SincronosDocumento8 páginasMotores SincronosIrving VazMarAinda não há avaliações
- Motores SincronosDocumento8 páginasMotores SincronosIrving VazMarAinda não há avaliações
- Sintesis Carga EléctricaDocumento5 páginasSintesis Carga EléctricaIrving VazMarAinda não há avaliações
- Ing. Electrico y Su Campo LaboralDocumento2 páginasIng. Electrico y Su Campo LaboralIrving VazMarAinda não há avaliações
- Instalación Eléctrica EficienteDocumento2 páginasInstalación Eléctrica EficienteIrving VazMarAinda não há avaliações
- Taller de EticaDocumento11 páginasTaller de EticaIrving VazMarAinda não há avaliações
- Sumador CompletoDocumento7 páginasSumador CompletoIrving VazMarAinda não há avaliações
- Catalogo de Accesorios en Una IntalaciónDocumento8 páginasCatalogo de Accesorios en Una IntalaciónIrving VazMarAinda não há avaliações
- Diseño Basico de ControladoresDocumento82 páginasDiseño Basico de ControladoresFrancisco RochaAinda não há avaliações
- Catalogo de Accesorios en Una IntalaciónDocumento8 páginasCatalogo de Accesorios en Una IntalaciónIrving VazMarAinda não há avaliações
- Reglamento (Laboratorio de Eléctrica)Documento3 páginasReglamento (Laboratorio de Eléctrica)Irving VazMarAinda não há avaliações
- Trabajo Sobre Ensayos Realizados A Materiales de ContracciónDocumento11 páginasTrabajo Sobre Ensayos Realizados A Materiales de ContracciónNaipe SpdAinda não há avaliações
- Detector de Voltaje y Descargador de CondensadoresDocumento2 páginasDetector de Voltaje y Descargador de Condensadorescarlos16702014Ainda não há avaliações
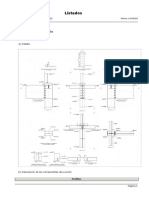
- ListadosDocumento15 páginasListadosKeibyn MolinaAinda não há avaliações
- John Berger Poemas de EmigracionDocumento4 páginasJohn Berger Poemas de EmigracionBel SalAinda não há avaliações
- Las Fórmulas de Cardano-FerrariDocumento5 páginasLas Fórmulas de Cardano-FerrariPedro100% (1)
- Hipotesis Lineas de Transmision PDFDocumento14 páginasHipotesis Lineas de Transmision PDFCR BraulioAinda não há avaliações
- PresentacionDocumento103 páginasPresentacionPancho ArrouchAinda não há avaliações
- Taller Electroneumatico. Nicolas ParedesDocumento8 páginasTaller Electroneumatico. Nicolas ParedesNICOLAS ESTEBAN PAREDES ORGANISTAAinda não há avaliações
- Práctica 2 - Prop Fcas I-2018-2Documento8 páginasPráctica 2 - Prop Fcas I-2018-2miguelAinda não há avaliações
- Efecto ZeemanDocumento11 páginasEfecto ZeemanCamilo MoraAinda não há avaliações
- Informe Mallas 2Documento26 páginasInforme Mallas 2Ricardo Ernesto Zapata CaroAinda não há avaliações
- Plan de Emergencia Centro ComercialDocumento27 páginasPlan de Emergencia Centro ComercialJo Cuevas100% (2)
- Guerrero Trip 110 Manual ServiceDocumento30 páginasGuerrero Trip 110 Manual Servicegabriel100% (2)
- Fisica IB Jose Pineda 17febDocumento2 páginasFisica IB Jose Pineda 17febJOSÉ SEBASTIÁN PINEDA RINCÓNAinda não há avaliações
- Tarea 3 - Teoremas de Conservacion - Eusebio SanchezDocumento17 páginasTarea 3 - Teoremas de Conservacion - Eusebio Sanchezleo3sanchez-12Ainda não há avaliações
- Cómo Hacer Un Informe de LaboratorioDocumento10 páginasCómo Hacer Un Informe de LaboratorioIz RemyAinda não há avaliações
- Teoria Del CieloDocumento175 páginasTeoria Del CieloAnonymous XPQKHSAinda não há avaliações
- Practica No.1 (Lab. Control Electromecánico)Documento10 páginasPractica No.1 (Lab. Control Electromecánico)Alexis MuñozAinda não há avaliações
- Problemas 2 Biblia DianaDocumento48 páginasProblemas 2 Biblia DianaDiana MartinezAinda não há avaliações
- Proyecto Piscina Municipal ZaragozaDocumento241 páginasProyecto Piscina Municipal ZaragozaMauricio Salinas Beltran100% (1)
- Ejercicio Practico Uap 2018-1Documento1 páginaEjercicio Practico Uap 2018-1EMERITO HUAMAN CHANTAAinda não há avaliações
- Turbina de VaporDocumento5 páginasTurbina de VaporAlex Ondarza RadaAinda não há avaliações
- Laboratorio 2 MicrobiologíaDocumento15 páginasLaboratorio 2 MicrobiologíaAlexis Puente BurgaAinda não há avaliações
- Masa 2Documento6 páginasMasa 2Joaquin de la CruzAinda não há avaliações
- Ejercicios - Furza Cortante y Momento FlectorDocumento23 páginasEjercicios - Furza Cortante y Momento FlectorVelia RosalesAinda não há avaliações
- Examen Del Curso de Tecnologia Del ConcrDocumento10 páginasExamen Del Curso de Tecnologia Del ConcrDaggi ChavezAinda não há avaliações
- Chem 2Documento246 páginasChem 2Eduardo GamboaAinda não há avaliações
- DRS Reglamento Servicios Alimentacion PublicoDocumento18 páginasDRS Reglamento Servicios Alimentacion PublicoMarcela GonzalezAinda não há avaliações
- QuimicaDocumento7 páginasQuimicaSteveen OrdoñezAinda não há avaliações
- Competencias Comunicativas Tarea 3Documento8 páginasCompetencias Comunicativas Tarea 3Kathe AguilarAinda não há avaliações