Você também pode gostar
- Pin MappingDocumento1 páginaPin Mappingapi-302071702Ainda não há avaliações
- Communication Encoder Bump SensorDocumento1 páginaCommunication Encoder Bump Sensorapi-302071702Ainda não há avaliações
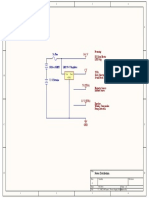
- Power SupplyDocumento1 páginaPower Supplyapi-302071702Ainda não há avaliações
- Hall Effect Sensor - NathanDocumento1 páginaHall Effect Sensor - Nathanapi-302071702Ainda não há avaliações
- Music Service Rev0Documento1 páginaMusic Service Rev0api-302071702Ainda não há avaliações
- Motor DriveDocumento1 páginaMotor Driveapi-302071702Ainda não há avaliações
- Button Debounce Service Rev0Documento1 páginaButton Debounce Service Rev0api-302071702Ainda não há avaliações
- Pac Service Rev1Documento3 páginasPac Service Rev1api-302071702Ainda não há avaliações
- Bump Sensor Service Rev0Documento1 páginaBump Sensor Service Rev0api-302071702Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- nRF52832 NFC Antenna Tuning: White PaperDocumento15 páginasnRF52832 NFC Antenna Tuning: White PaperCanAinda não há avaliações
- Cucumber Gherkin LanguageDocumento19 páginasCucumber Gherkin LanguageEddy PinzonAinda não há avaliações
- ECOTOXicology Knowledgebase SystemDocumento100 páginasECOTOXicology Knowledgebase SystemHigor LessaAinda não há avaliações
- 6.189: Introduction To Programming in Python: Course SyllabusDocumento6 páginas6.189: Introduction To Programming in Python: Course SyllabusexemplariAinda não há avaliações
- Instruction Manual: Portable Vibrometer: VM-4424S/HDocumento35 páginasInstruction Manual: Portable Vibrometer: VM-4424S/HKitti BoonsongAinda não há avaliações
- Easy C Programming Problems & Solution For BeginnersDocumento10 páginasEasy C Programming Problems & Solution For BeginnershsleonisAinda não há avaliações
- Tia Eia 637 ADocumento110 páginasTia Eia 637 ApzernikAinda não há avaliações
- NPT 1200 - R1 NotesDocumento28 páginasNPT 1200 - R1 NotesJaime Garcia De Paredes100% (4)
- C6925 0000 Komputer Przemysłowy Beckhoff Manual PDFDocumento152 páginasC6925 0000 Komputer Przemysłowy Beckhoff Manual PDFThưởng Văn LêAinda não há avaliações
- Experiment 1: Aim: Configure Diodes and Transistor As Logic Gates and Digital Ics For Verification of Truth TableDocumento14 páginasExperiment 1: Aim: Configure Diodes and Transistor As Logic Gates and Digital Ics For Verification of Truth TableManan MehtaAinda não há avaliações
- Neltec Color MG CDocumento34 páginasNeltec Color MG CJavier Manuel IbanezAinda não há avaliações
- Amusnet Seamless Integration Guide v1.17Documento45 páginasAmusnet Seamless Integration Guide v1.17Vip3r011Ainda não há avaliações
- All About Data Transfer Process (DTP) - SAP BW 7 - SCNDocumento6 páginasAll About Data Transfer Process (DTP) - SAP BW 7 - SCNloknathtanikantiAinda não há avaliações
- SSRN Id635803Documento90 páginasSSRN Id635803jorgeorsomoAinda não há avaliações
- Somove Lite V1.5: ReadmeDocumento15 páginasSomove Lite V1.5: ReadmeNilton Manrique CossioAinda não há avaliações
- OJT AtTRACK - On The Job Trainee Remote Attendance Monitoring System Using Face Recognition SystemDocumento6 páginasOJT AtTRACK - On The Job Trainee Remote Attendance Monitoring System Using Face Recognition SystemIOER International Multidisciplinary Research Journal ( IIMRJ)Ainda não há avaliações
- Source Code Student Admission FormDocumento74 páginasSource Code Student Admission FormRahul Vasant SawantAinda não há avaliações
- Reaction Paper: Republic Act 10173Documento1 páginaReaction Paper: Republic Act 10173Chubs Bonbon83% (6)
- WatchGuard Presentation For AbadataDocumento38 páginasWatchGuard Presentation For AbadatasiouxinfoAinda não há avaliações
- Case Study Deutsche Bank Compas Banking Luxoft For Risk Management AdvisoryDocumento5 páginasCase Study Deutsche Bank Compas Banking Luxoft For Risk Management AdvisoryluxoftAinda não há avaliações
- When Will Computer Hardware Match The Human Brain - by Hans MoravecDocumento10 páginasWhen Will Computer Hardware Match The Human Brain - by Hans MoravecCamilo Andrés Leiton TocarrunchoAinda não há avaliações
- Tetra Voice Gateway: High Capacity, Flexible Integration of TETRA Voice With Control RoomsDocumento2 páginasTetra Voice Gateway: High Capacity, Flexible Integration of TETRA Voice With Control RoomsSe ZeAinda não há avaliações
- Asignment 01Documento2 páginasAsignment 01Thục ĐoanAinda não há avaliações
- Amazon: Exam Questions AWS-Certified-Developer-AssociateDocumento6 páginasAmazon: Exam Questions AWS-Certified-Developer-AssociateAmit JainAinda não há avaliações
- Petta Lab Raith EBL Guide for GaAs DevicesDocumento13 páginasPetta Lab Raith EBL Guide for GaAs DevicesSudipta DuttaAinda não há avaliações
- M817 13 4-GO-LW A4 E ScreenDocumento19 páginasM817 13 4-GO-LW A4 E ScreenRikyAinda não há avaliações
- LDA KNN LogisticDocumento29 páginasLDA KNN Logisticshruti gujar100% (1)
- IT0007-Laboratory-Exercise-6 - Creating CodesDocumento6 páginasIT0007-Laboratory-Exercise-6 - Creating CodesDenise JaoAinda não há avaliações
- I-Unit C#Documento20 páginasI-Unit C#Swapnil RathodAinda não há avaliações
- IC Risk Register Template For Banks 9419Documento2 páginasIC Risk Register Template For Banks 9419Rahmat ChenaarAinda não há avaliações