Você também pode gostar
- Transportation ProblemDocumento17 páginasTransportation ProblemHarjeet Kaur100% (2)
- Assignment PDFDocumento4 páginasAssignment PDFDark LightAinda não há avaliações
- Operations ResearchDocumento1 páginaOperations ResearchKushal Bothra0% (1)
- Transportaion Problem - 2 Marks and 16 Marks QuestionsDocumento12 páginasTransportaion Problem - 2 Marks and 16 Marks QuestionsThaddeus Moore86% (7)
- Master of Business Administration: Quantitative Analysis For Management DecisionsDocumento75 páginasMaster of Business Administration: Quantitative Analysis For Management DecisionsDawit TesfayeAinda não há avaliações
- Newton Forward and BackwardDocumento39 páginasNewton Forward and BackwardRoshan ShanmughanAinda não há avaliações
- Operation Research - QuestionDocumento15 páginasOperation Research - QuestionLeo Tech100% (3)
- Operation Research Assignment OptimizationDocumento6 páginasOperation Research Assignment Optimizationgammoora78% (9)
- Solving Assignment and Integer Programming ProblemsDocumento6 páginasSolving Assignment and Integer Programming Problemsshahsanjayg196850% (2)
- Operations Research I - Final ExamDocumento9 páginasOperations Research I - Final Examapi-3811559100% (2)
- Practice Problem 3-2 - Minimization of Cost (Simplex Method)Documento3 páginasPractice Problem 3-2 - Minimization of Cost (Simplex Method)Jeon JungkookAinda não há avaliações
- 2.fitting of Curves and ParabolaDocumento9 páginas2.fitting of Curves and ParabolaShubham100% (2)
- Simplex Method Solves Linear Programming ProblemsDocumento181 páginasSimplex Method Solves Linear Programming Problemsimran_chaudhryAinda não há avaliações
- Transportation Problems - Answer KeyDocumento21 páginasTransportation Problems - Answer KeySasi SarvamAinda não há avaliações
- OR QuizDocumento5 páginasOR Quizabhik78975% (4)
- Chapter Two - PPTX FinalDocumento61 páginasChapter Two - PPTX Finalsemetegna she zemen 8ተኛው ሺ zemen ዘመንAinda não há avaliações
- Simplex MethodDocumento24 páginasSimplex MethodAce Maynard Dianco50% (2)
- Sample Problems-Work SamplingDocumento6 páginasSample Problems-Work SamplingL.a. Ladores100% (2)
- Goal ProgrammingDocumento44 páginasGoal ProgrammingAnimesh Choudhary100% (4)
- Taylch 07Documento31 páginasTaylch 07Yat Kunt Chan100% (1)
- Unit 3 2DRVDocumento82 páginasUnit 3 2DRVshubham raj laxmiAinda não há avaliações
- Or Examples SolutionsDocumento14 páginasOr Examples Solutionsmohamadalfar111100% (1)
- 3 methods LPP simplexDocumento3 páginas3 methods LPP simplexChandra HasanAinda não há avaliações
- Two-Phase Simplex Method Explained for Infeasible Linear ProgramDocumento45 páginasTwo-Phase Simplex Method Explained for Infeasible Linear Programzohaib100% (2)
- Numerical Methods T 264 Unit IV by DR N V Nagendram PDFDocumento36 páginasNumerical Methods T 264 Unit IV by DR N V Nagendram PDFOpeyemi OloruntegbeAinda não há avaliações
- Picards MethodDocumento6 páginasPicards Method064 Jayapratha P R100% (1)
- Operations Research Chapter 2Documento23 páginasOperations Research Chapter 2Zerihu100% (3)
- OR MCQDocumento7 páginasOR MCQBadder Danbad100% (1)
- Four Special Cases in SimplexDocumento51 páginasFour Special Cases in SimplexQais87% (15)
- Curve FittingDocumento28 páginasCurve FittingCillalois Marie FameroAinda não há avaliações
- Chapter 11 - Network Models - Operations ResearchDocumento12 páginasChapter 11 - Network Models - Operations ResearchAnkit Saxena100% (5)
- Operations Research: USN 06CS661 Sixth Semester B.E. Degree Examination, June/July 2009Documento23 páginasOperations Research: USN 06CS661 Sixth Semester B.E. Degree Examination, June/July 2009Jitesh Sekar33% (3)
- Transportation and Assignment ProblemsDocumento45 páginasTransportation and Assignment ProblemsAnomoi Septentrio50% (2)
- King Abdul Aziz University Functions GuideDocumento61 páginasKing Abdul Aziz University Functions GuideLeonardus RicardoAinda não há avaliações
- OR Chapter 1&2Documento91 páginasOR Chapter 1&2sami damtewAinda não há avaliações
- IIR Direct Form RealizationDocumento69 páginasIIR Direct Form RealizationAbdul Basit MughalAinda não há avaliações
- Simplex Method - Maximisation CaseDocumento12 páginasSimplex Method - Maximisation CaseJoseph George KonnullyAinda não há avaliações
- A Case Study On Decision TheoryDocumento11 páginasA Case Study On Decision TheoryAkash SoniAinda não há avaliações
- Linear Programming OptimizationDocumento37 páginasLinear Programming OptimizationlaestatAinda não há avaliações
- 307C Operations ResearchDocumento25 páginas307C Operations ResearchBasant SharmaAinda não há avaliações
- SampleFINAL KEY 205 TaylorDocumento9 páginasSampleFINAL KEY 205 Tayloraskar_cbaAinda não há avaliações
- Unit 3 BBA 1ST BMDocumento6 páginasUnit 3 BBA 1ST BMRam KrishnaAinda não há avaliações
- Operational ResearchDocumento2 páginasOperational ResearchKeerthiga Chandrasekar100% (4)
- LPP Solution Using Simplex MethodDocumento56 páginasLPP Solution Using Simplex Methodrohit4567850% (2)
- Linear Programming Problem (LPP)Documento24 páginasLinear Programming Problem (LPP)Shrouk__Anas100% (1)
- Chapter 6 Integer Linear Programming: Multiple-ChoiceDocumento39 páginasChapter 6 Integer Linear Programming: Multiple-Choicew3n123100% (5)
- 1.operations ResearchDocumento36 páginas1.operations ResearchPiuShan Prasanga Perera100% (1)
- Chapter V Transportation and Assignment ProblemsDocumento56 páginasChapter V Transportation and Assignment ProblemsErit AhmedAinda não há avaliações
- Langranges Interpolation MethodDocumento51 páginasLangranges Interpolation Methodzee khanAinda não há avaliações
- Goal ProgrammingDocumento48 páginasGoal ProgrammingRajyalakshmiAinda não há avaliações
- Queuing Theory New With Practice QuestionsDocumento18 páginasQueuing Theory New With Practice QuestionsAnn OkothAinda não há avaliações
- MCQ Operation ResearchDocumento9 páginasMCQ Operation ResearchAtul Gaur86% (21)
- LP Graphical Method - Special CasesDocumento21 páginasLP Graphical Method - Special CasesBaiju BawaraAinda não há avaliações
- Graphical MethodDocumento11 páginasGraphical MethodDileep KumarAinda não há avaliações
- Chap 12 LPPDocumento16 páginasChap 12 LPPShivamAinda não há avaliações
- Exercises 1 1) (The Solution Is Not Given.) Given The Following Programming ProblemsDocumento4 páginasExercises 1 1) (The Solution Is Not Given.) Given The Following Programming ProblemsDavid BusinelliAinda não há avaliações
- OR6205 M9 Practice Exam 2Documento5 páginasOR6205 M9 Practice Exam 2Mohan BollaAinda não há avaliações
- Multiple Optimal Solution; Ubounded Solutions; No Feasible SolutionDocumento7 páginasMultiple Optimal Solution; Ubounded Solutions; No Feasible SolutionabcdAinda não há avaliações
- Classical Optimization Theory Quadratic Forms: Let Be A N-VectorDocumento48 páginasClassical Optimization Theory Quadratic Forms: Let Be A N-VectorAngad SehdevAinda não há avaliações
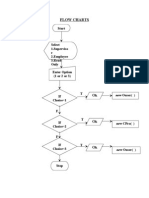
- Flow Charts Option: StartDocumento13 páginasFlow Charts Option: StartbalabooksAinda não há avaliações
- Oral and Practical Tests: MechanicDocumento19 páginasOral and Practical Tests: MechanicHugo AlmeidaAinda não há avaliações
- Sop Hydraulic Punch and ShearDocumento1 páginaSop Hydraulic Punch and ShearBorislav VulićAinda não há avaliações
- Avio 550 Max ICP-OES ASTM D5185 In-Service Oils Application NoteDocumento4 páginasAvio 550 Max ICP-OES ASTM D5185 In-Service Oils Application Notec1nthiacruzAinda não há avaliações
- Tractor 2017 Catalogue WebDocumento36 páginasTractor 2017 Catalogue WebAnonymous 1XBCMXAinda não há avaliações
- Ahmed Mohammed EL Desouky 2007Documento8 páginasAhmed Mohammed EL Desouky 2007Hazem MohamedAinda não há avaliações
- Mock Test Jee MainDocumento142 páginasMock Test Jee MainAkash Ghosh0% (1)
- Brandt M FR Btd500blnDocumento74 páginasBrandt M FR Btd500blnStéphane JoussetAinda não há avaliações
- Novajet Refference GuideDocumento74 páginasNovajet Refference GuideoralbnetworkAinda não há avaliações
- Wrf736sdam14 - Tech - Sheet - W10811276 - Rev - B Otro Modelo de La Nevera de Oliva OcoaDocumento5 páginasWrf736sdam14 - Tech - Sheet - W10811276 - Rev - B Otro Modelo de La Nevera de Oliva OcoaEdison EspinalAinda não há avaliações
- The B-GON Solution: To Mist EliminationDocumento20 páginasThe B-GON Solution: To Mist EliminationDimitris Sardis LAinda não há avaliações
- 1170 Imagerunner Advance DX 4700 Series PC r0 200228Documento180 páginas1170 Imagerunner Advance DX 4700 Series PC r0 200228Marco Antonio Valverde MarinAinda não há avaliações
- Measurement & Calculation of Vehicle Center of Gravity Using Portable Wheel ScalesDocumento11 páginasMeasurement & Calculation of Vehicle Center of Gravity Using Portable Wheel ScalesVedant KodagiAinda não há avaliações
- Pco2Documento55 páginasPco2camdentownAinda não há avaliações
- Leg Foot Massager 1026 ManualDocumento5 páginasLeg Foot Massager 1026 ManualBhushan BhikeAinda não há avaliações
- 59-Form and Plot Frame Editor PDFDocumento70 páginas59-Form and Plot Frame Editor PDFAries TsaiAinda não há avaliações
- PalindromeDocumento7 páginasPalindromeZy AdrianneAinda não há avaliações
- YaskawaDocumento375 páginasYaskawaCristian IozsaAinda não há avaliações
- Jeepney Demand and Supply in Baguio CityDocumento19 páginasJeepney Demand and Supply in Baguio CityJanna CrowAinda não há avaliações
- Capacitor Banks - Schedules FILLEDDocumento11 páginasCapacitor Banks - Schedules FILLEDyahyaAinda não há avaliações
- Phase Diagrams IntroductionDocumento76 páginasPhase Diagrams IntroductionGikiTopiAinda não há avaliações
- Signals and Systems - MjrobertsDocumento3 páginasSignals and Systems - Mjrobertspriyakanthr5883100% (1)
- Variable Frequency Drive Using IR215xDocumento7 páginasVariable Frequency Drive Using IR215xartyomAinda não há avaliações
- NASA ERAST Program Develops High-Altitude UAVsDocumento17 páginasNASA ERAST Program Develops High-Altitude UAVsEgz AguilarAinda não há avaliações
- Standard For Safety UL ADocumento49 páginasStandard For Safety UL ANhất NgônAinda não há avaliações
- Cat 120H, 12H, 140H, 143H, 160H, 163H TransmisiónDocumento8 páginasCat 120H, 12H, 140H, 143H, 160H, 163H TransmisiónJefferson Maldonado.Ainda não há avaliações
- Infiltration Ventilation LeakageDocumento42 páginasInfiltration Ventilation LeakageBulut YildizAinda não há avaliações
- Solution 2 AntennaDocumento7 páginasSolution 2 Antennaabdulwahab12100% (1)
- BlowersDocumento58 páginasBlowersmahmad61100% (1)
- KALEKİMDocumento18 páginasKALEKİMqaisalkurdyAinda não há avaliações