Você também pode gostar
- Catenary Curve EquationsDocumento5 páginasCatenary Curve Equationszyrrel perey hoAinda não há avaliações
- Catenary Cable TheoryDocumento7 páginasCatenary Cable TheorytdfsksAinda não há avaliações
- Inclined Span Module Estimates Sag and ClearanceDocumento5 páginasInclined Span Module Estimates Sag and ClearanceAjay JayabalanAinda não há avaliações
- Sag and Tension Calculations For Cable and Wire Spans Using Catenary FormulasDocumento8 páginasSag and Tension Calculations For Cable and Wire Spans Using Catenary Formulassamadi88100% (1)
- Catenary CurvesDocumento10 páginasCatenary CurvesSantosh RaiAinda não há avaliações
- Sag & Tension CalculationDocumento6 páginasSag & Tension CalculationSandeep Guha Niyogi94% (18)
- 520 Floatingdocks e 2019Documento19 páginas520 Floatingdocks e 2019Kaung Sett LynnAinda não há avaliações
- Sag and tension calculation formulasDocumento23 páginasSag and tension calculation formulasSarfaraz Ahmed Brohi100% (3)
- Over Head Line SAG TensionDocumento8 páginasOver Head Line SAG Tensionsreedhar100% (1)
- Zhu Dongqis Thesis PDFDocumento188 páginasZhu Dongqis Thesis PDFThomas FritzAinda não há avaliações
- 123 Mini Tower PDFDocumento43 páginas123 Mini Tower PDFVishAinda não há avaliações
- Oblique Wind on Structures: An Inconvenient TruthDocumento67 páginasOblique Wind on Structures: An Inconvenient TruthSergio100% (1)
- Structural Steel Fabrication Tolerances GuideDocumento6 páginasStructural Steel Fabrication Tolerances GuideRene Alfonso BeltranAinda não há avaliações
- Stability CriteriaDocumento7 páginasStability CriteriaSuperducksAinda não há avaliações
- Design of RCC ColumnsDocumento8 páginasDesign of RCC Columnshitendra_gkAinda não há avaliações
- Stiffness method for beams and framesDocumento62 páginasStiffness method for beams and framesArviSan0% (1)
- CATENARY SAG-TENSION CALCULATOR (By: Jared Cuchapin, 2018) : 300 DrakeDocumento12 páginasCATENARY SAG-TENSION CALCULATOR (By: Jared Cuchapin, 2018) : 300 Drakedursun_yerlikaya100% (2)
- Ships Contruction and CalculationDocumento364 páginasShips Contruction and CalculationArmskieAinda não há avaliações
- Catenary Sag-Tension Calculator (Even and Uneven)Documento2 páginasCatenary Sag-Tension Calculator (Even and Uneven)mohsin160Ainda não há avaliações
- Better Design of Wheel Loaded DecksDocumento36 páginasBetter Design of Wheel Loaded Decks금동민Ainda não há avaliações
- Exact Solution of Catenary CurvesDocumento3 páginasExact Solution of Catenary Curvesp rAinda não há avaliações
- Corrugated Panel - Buckling CheckDocumento18 páginasCorrugated Panel - Buckling CheckAdarsh D. KarkiAinda não há avaliações
- Longitudinal Stability (1) Trim: 48 Cms by The SternDocumento15 páginasLongitudinal Stability (1) Trim: 48 Cms by The SternBharatiyulam100% (1)
- Ce 234 Simple StressDocumento26 páginasCe 234 Simple StressElle PrttyAinda não há avaliações
- Sag Tension ChartDocumento64 páginasSag Tension ChartSubhadeep Das100% (1)
- Analytic Method To Calculate and Characterize The Sag and Tension of Overhead Lines - IEEE Journals & MagazineDocumento4 páginasAnalytic Method To Calculate and Characterize The Sag and Tension of Overhead Lines - IEEE Journals & MagazinesreedharAinda não há avaliações
- Roger Caffin's Catenary Curve CalculatorDocumento6 páginasRoger Caffin's Catenary Curve Calculatorviggen_one2002Ainda não há avaliações
- Design Ang Analysis of Steel Catenary Riser System For Deep Water PDFDocumento128 páginasDesign Ang Analysis of Steel Catenary Riser System For Deep Water PDFAmbarisqia DwifaAinda não há avaliações
- Tapered Power PolesDocumento12 páginasTapered Power PolesDon DeolAinda não há avaliações
- Substation Design ExampleDocumento14 páginasSubstation Design ExampleLeonichevAinda não há avaliações
- P-Delta Effect, One Type of Geometric Nonlinearity, Involves TheDocumento6 páginasP-Delta Effect, One Type of Geometric Nonlinearity, Involves ThehfgfgAinda não há avaliações
- Design and Analysis For CraneDocumento10 páginasDesign and Analysis For CraneOmar WardehAinda não há avaliações
- Structural Analysis of Transmission Structures: 1.problem DescriptionDocumento69 páginasStructural Analysis of Transmission Structures: 1.problem DescriptionMahesh AAinda não há avaliações
- The Catenary PDFDocumento5 páginasThe Catenary PDFChandra PrakashAinda não há avaliações
- BargesDocumento12 páginasBargestheodorebayuAinda não há avaliações
- Pulley MechanicsDocumento8 páginasPulley MechanicslaestatAinda não há avaliações
- Anchor Chain Locker Volume CalculationDocumento1 páginaAnchor Chain Locker Volume Calculationbasant_konatAinda não há avaliações
- PLS CaddDocumento11 páginasPLS CaddRatana KemAinda não há avaliações
- USD T BeamDocumento10 páginasUSD T BeammanowarAinda não há avaliações
- Design of Overhead Transmission Line FoundationDocumento8 páginasDesign of Overhead Transmission Line FoundationFlores JesusAinda não há avaliações
- Effect of Sag On Transmission LineDocumento4 páginasEffect of Sag On Transmission LineMohan ManickamAinda não há avaliações
- Gravity Retaining WallDocumento5 páginasGravity Retaining WallDudu DuduAinda não há avaliações
- CatenaryDocumento13 páginasCatenaryRamiro RiveraAinda não há avaliações
- Structural Design Ships - 1 - IntroductionDocumento26 páginasStructural Design Ships - 1 - Introductionknowme73Ainda não há avaliações
- 10 Analysis of Pipe Flows: The Moody ChartDocumento8 páginas10 Analysis of Pipe Flows: The Moody ChartMiguel Angel Alvarez BoreaAinda não há avaliações
- Basic ship design and hull form characteristicsDocumento75 páginasBasic ship design and hull form characteristicsRENGANATHAN P100% (1)
- Response Based Weather-Routing and Operation Planning of Heavy Transport VesselsDocumento9 páginasResponse Based Weather-Routing and Operation Planning of Heavy Transport VesselsKuya Fabio VidalAinda não há avaliações
- 132 KV Tower Analysis PDFDocumento11 páginas132 KV Tower Analysis PDFViswanathan VAinda não há avaliações
- U 2 L 9 Sag at Erection Stringing Chart and Sag TemplatesDocumento4 páginasU 2 L 9 Sag at Erection Stringing Chart and Sag TemplatesharimadhavareddyAinda não há avaliações
- Structural Analysis of Lattice Steel Transmission TowersDocumento11 páginasStructural Analysis of Lattice Steel Transmission Towersdare93Ainda não há avaliações
- Catenary Curve GuideDocumento17 páginasCatenary Curve Guideatmane1984Ainda não há avaliações
- Physics curve shape hanging chain cableDocumento2 páginasPhysics curve shape hanging chain cableJack SwaggerAinda não há avaliações
- Introduction To ShellsDocumento14 páginasIntroduction To ShellskatsiboxAinda não há avaliações
- The Shape of a Hanging StringDocumento6 páginasThe Shape of a Hanging StringHyunkyoun JinAinda não há avaliações
- Cable Shape & Strength: Telford and The Flat Form BridgeDocumento15 páginasCable Shape & Strength: Telford and The Flat Form Bridgerene boisselleAinda não há avaliações
- Catenary - Britannica Online EncyclopediaDocumento2 páginasCatenary - Britannica Online EncyclopediapaoceroAinda não há avaliações
- ch1 3Documento60 páginasch1 3abubakarsadiiq.engAinda não há avaliações
- Mathematical Model Predicts Moment-Less Arch ShapesDocumento14 páginasMathematical Model Predicts Moment-Less Arch ShapeschaaliAinda não há avaliações
- Force Variations and Slackness in Tied Arch Bridges With Crossing HangersDocumento10 páginasForce Variations and Slackness in Tied Arch Bridges With Crossing HangersAlin SalageanAinda não há avaliações
- Optimal Design of Elastic Columns For Maximum Buckling LoadDocumento27 páginasOptimal Design of Elastic Columns For Maximum Buckling LoadDragan SpasicAinda não há avaliações
- Bar Bending Schedule Excel Form4Documento133 páginasBar Bending Schedule Excel Form4atac101100% (1)
- PDADocumento7 páginasPDALasantha DadallageAinda não há avaliações
- Design and Detailing of Flat Slab.Documento22 páginasDesign and Detailing of Flat Slab.DarsHan MoHanAinda não há avaliações
- Brick MortarDocumento6 páginasBrick MortarChris NaveenAinda não há avaliações
- Kharagpur - Staircase Design PDFDocumento38 páginasKharagpur - Staircase Design PDFjmusopole50% (2)
- Curtain WallDocumento49 páginasCurtain WallDaniel ReynoldsAinda não há avaliações
- Sefindia OrgDocumento47 páginasSefindia OrgSuman SahaAinda não há avaliações
- 2010 Workshop Wave Propagation Theory and The Testing of Deep FoundationsDocumento22 páginas2010 Workshop Wave Propagation Theory and The Testing of Deep Foundationsatac101Ainda não há avaliações
- StairsDocumento21 páginasStairstomnubiAinda não há avaliações
- Rebar Arrangement in SlabDocumento12 páginasRebar Arrangement in Slableovorig100% (2)
- 3 Design of Reinforce Concrete Slab PDFDocumento50 páginas3 Design of Reinforce Concrete Slab PDFAvish GunnuckAinda não há avaliações
- Rebar Arrangement in SlabDocumento12 páginasRebar Arrangement in Slableovorig100% (2)
- 1 Zafar AdeelDocumento20 páginas1 Zafar Adeelatac101Ainda não há avaliações
- Handout 3 12Documento24 páginasHandout 3 12atac101Ainda não há avaliações
- Dev LengthDocumento5 páginasDev LengthdghtghfgjhhjjhnAinda não há avaliações
- Bond and Development LengthDocumento19 páginasBond and Development LengthmikeengineeringAinda não há avaliações
- Development LengthDocumento22 páginasDevelopment LengthAlok MamAinda não há avaliações
- Evaluation of Seismic Behavior For Moment Frames and Eccentrically Braced Frames Due To Near-Field Ground MotionsDocumento22 páginasEvaluation of Seismic Behavior For Moment Frames and Eccentrically Braced Frames Due To Near-Field Ground Motionsatac101Ainda não há avaliações
- Development Length of Reinforcing Bars - Need To Revise Indian Code ProvisionsDocumento8 páginasDevelopment Length of Reinforcing Bars - Need To Revise Indian Code ProvisionsAvijitAinda não há avaliações
- V7 Design Example 2013 PDFDocumento1 páginaV7 Design Example 2013 PDFwhadddupAinda não há avaliações
- Design Example V6: 3000mm End ConditionsDocumento1 páginaDesign Example V6: 3000mm End Conditionsatac101Ainda não há avaliações
- V7 Solution 2013Documento4 páginasV7 Solution 2013atac101Ainda não há avaliações
- V4 Solution 2013Documento3 páginasV4 Solution 2013atac101Ainda não há avaliações
- V7 Design Example 2013 PDFDocumento1 páginaV7 Design Example 2013 PDFwhadddupAinda não há avaliações
- V5 Solution 2013Documento4 páginasV5 Solution 2013atac101Ainda não há avaliações
- Design Example V3: 3000mm End ConditionsDocumento1 páginaDesign Example V3: 3000mm End Conditionsatac101Ainda não há avaliações
- V6 SolutionDocumento4 páginasV6 Solutionbharath_9585Ainda não há avaliações
- v5 Design Example 5 2013Documento1 páginav5 Design Example 5 2013atac101Ainda não há avaliações
- v4 Design Example 2013Documento1 páginav4 Design Example 2013atac101Ainda não há avaliações
- Solution - Design Example V3: Id IdDocumento2 páginasSolution - Design Example V3: Id Idatac101Ainda não há avaliações
- Civil Engineering McqsDocumento36 páginasCivil Engineering McqsEngr Saleem ShahzadAinda não há avaliações
- Transmission and Substation Design Operation Technical PapersDocumento284 páginasTransmission and Substation Design Operation Technical Papersolac17100% (3)
- 02AQWA Example C A Tanker and BouyDocumento45 páginas02AQWA Example C A Tanker and BouySyed HasanAinda não há avaliações
- StructuralAnalysis Sutong BridgeDocumento10 páginasStructuralAnalysis Sutong BridgenvngonAinda não há avaliações
- Takeshi Ishihara, Muhammad Bilal Waris, Ken KagayaDocumento1 páginaTakeshi Ishihara, Muhammad Bilal Waris, Ken KagayaaseAinda não há avaliações
- Design and Analysis of Reinforced Concrete ShellsDocumento3 páginasDesign and Analysis of Reinforced Concrete ShellsPonnada MarkandeyarajuAinda não há avaliações
- Application of The Ruling Span Concept For Overhead Lines in Mountainous Terrain.Documento6 páginasApplication of The Ruling Span Concept For Overhead Lines in Mountainous Terrain.diux96Ainda não há avaliações
- Habasit Chain Engineering GuideDocumento62 páginasHabasit Chain Engineering GuideScripts TeamAinda não há avaliações
- SRBDocumento43 páginasSRBsandeepAinda não há avaliações
- Guidelines for Safe Offshore Anchor HandlingDocumento25 páginasGuidelines for Safe Offshore Anchor HandlingAjay Singh100% (1)
- Stringing ChartDocumento4 páginasStringing ChartHikmat B. Ayer - हिक्मत ब. ऐरAinda não há avaliações
- M2-1 DistanceMeasurement ChainingDocumento10 páginasM2-1 DistanceMeasurement ChainingSiddhant Jain AsatiAinda não há avaliações
- AMA2213 Tutorial-02Documento3 páginasAMA2213 Tutorial-02Shaminda KanchanaAinda não há avaliações
- Cable SystemsDocumento30 páginasCable SystemsShiwani TailorAinda não há avaliações
- ConveyorDocumento42 páginasConveyorPratap ValekarAinda não há avaliações
- IEEE TPC Tutorial Sag TensionCalcsDocumento33 páginasIEEE TPC Tutorial Sag TensionCalcsabhijitAinda não há avaliações
- Project111 smcc144Documento10 páginasProject111 smcc144burvanovAinda não há avaliações
- F1523.8421-1 Standard Guide For Selection of Booms in Water 1Documento2 páginasF1523.8421-1 Standard Guide For Selection of Booms in Water 1qodri fitrothul khasanah100% (1)
- Understanding Structural Concepts PDFDocumento178 páginasUnderstanding Structural Concepts PDFMohitAinda não há avaliações
- Quadratic FunctionsDocumento8 páginasQuadratic FunctionsPaul John TasicAinda não há avaliações
- Anchor ManualDocumento168 páginasAnchor ManualAdiguna DhanaAinda não há avaliações
- The Catenary PDFDocumento5 páginasThe Catenary PDFChandra PrakashAinda não há avaliações
- Ropeways - Technical Guidelines For Gravity Goods RopewayDocumento144 páginasRopeways - Technical Guidelines For Gravity Goods RopewayAnil Marsani100% (2)
- Arup Journal 1 2011Documento80 páginasArup Journal 1 2011suheilbugsAinda não há avaliações
- MIDAS 2013 Indonesia Workshop - Cable Stayed BridgeDocumento85 páginasMIDAS 2013 Indonesia Workshop - Cable Stayed BridgeDanang Rahadian100% (1)
- V.002 Vryhof Manual For WebDocumento170 páginasV.002 Vryhof Manual For WebShubhrajit Maitra100% (1)
- Update On The Design of Steel Catenary Riser Systems PDFDocumento12 páginasUpdate On The Design of Steel Catenary Riser Systems PDFZylyn KuaAinda não há avaliações
- IBP1099 - 19 Deep Water Pip Installation Using Reel-Lay MethodDocumento12 páginasIBP1099 - 19 Deep Water Pip Installation Using Reel-Lay MethodMarcelo Varejão CasarinAinda não há avaliações
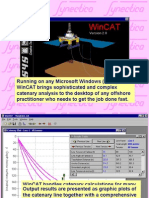
- Powerful desktop software for the analysis of hanging cable systemsDocumento17 páginasPowerful desktop software for the analysis of hanging cable systemsRaymundo AlarconAinda não há avaliações
- OLF - NSA Guidelines For Safe Handling and TowingDocumento22 páginasOLF - NSA Guidelines For Safe Handling and TowingTomash VerbitskyAinda não há avaliações