Você também pode gostar
- EN-32m Manual For The HG32M - PDFDocumento69 páginasEN-32m Manual For The HG32M - PDFJuan José Matos Ch100% (1)
- Antenna Seatel Series 94 Troubleshooting GuideDocumento248 páginasAntenna Seatel Series 94 Troubleshooting GuideDo0k13100% (3)
- Lec 6: Gain, Phase Margin, Designing With Bode Plots, CompensatorsDocumento10 páginasLec 6: Gain, Phase Margin, Designing With Bode Plots, CompensatorszakiannuarAinda não há avaliações
- Unit 5 1. Compensator Design Using Bode Plot: Points To RememberDocumento10 páginasUnit 5 1. Compensator Design Using Bode Plot: Points To RememberRajasekhar AtlaAinda não há avaliações
- Lab 8Documento12 páginasLab 8awalu23Ainda não há avaliações
- Lab Experiment 7: Introduction To Bode Plots, Phase and Gain MarginDocumento12 páginasLab Experiment 7: Introduction To Bode Plots, Phase and Gain MarginFahad AneebAinda não há avaliações
- Compensator Design Using Bode PlotDocumento18 páginasCompensator Design Using Bode PlotHBAinda não há avaliações
- Gain & Phase Margin - Bode PlotDocumento28 páginasGain & Phase Margin - Bode PlotDeepthiAinda não há avaliações
- Compensator Design Using Bode PlotDocumento24 páginasCompensator Design Using Bode PlotShah JayAinda não há avaliações
- The Design of Feedback Control SystemsDocumento36 páginasThe Design of Feedback Control SystemsNirmal Kumar PandeyAinda não há avaliações
- Chapter 10 PID 1Documento36 páginasChapter 10 PID 1Taufiq GalangAinda não há avaliações
- Chapter 8 (Lag Compensation)Documento40 páginasChapter 8 (Lag Compensation)Nischal MaharjanAinda não há avaliações
- 1 Bode PlotDocumento6 páginas1 Bode PlotAdithya AdigaAinda não há avaliações
- Bode Plots OverviewDocumento71 páginasBode Plots OverviewibinhabeebAinda não há avaliações
- D CMotorSpeedDocumento8 páginasD CMotorSpeedjijo123408Ainda não há avaliações
- ROOT LOCUS Control System DesignDocumento25 páginasROOT LOCUS Control System DesignJustin Watkins100% (1)
- Lag, Lead, Lead-Lag - Compensation in Control SystemDocumento11 páginasLag, Lead, Lead-Lag - Compensation in Control SystemShah Jay100% (1)
- Lag CompensationDocumento40 páginasLag CompensationMeer Zafarullah NoohaniAinda não há avaliações
- Whatis Frequency Response?Documento32 páginasWhatis Frequency Response?Arshiya Kousar MAinda não há avaliações
- Chapter 4Documento86 páginasChapter 4TejkumarigurungAinda não há avaliações
- Phase Lead Compensator Design Using Bode Plots: ObjectivesDocumento7 páginasPhase Lead Compensator Design Using Bode Plots: ObjectivesMuhammad AdeelAinda não há avaliações
- CompensationDocumento11 páginasCompensationCyprian Obota OtienoAinda não há avaliações
- Debre Tabor University: Faculty of Technology Department of Electromechanical EngineeringDocumento46 páginasDebre Tabor University: Faculty of Technology Department of Electromechanical EngineeringBIRSHAinda não há avaliações
- Compensation in Control SystemDocumento10 páginasCompensation in Control Systemshouvikchaudhuri0% (1)
- Lab 5 ControlDocumento6 páginasLab 5 ControlAyaz AhmadAinda não há avaliações
- Chapter FourDocumento57 páginasChapter FourBelayneh AbirhamAinda não há avaliações
- EEN-305 Advanced Control Systems Lab ReportDocumento16 páginasEEN-305 Advanced Control Systems Lab ReportRitik MathurAinda não há avaliações
- Control Exp 03Documento10 páginasControl Exp 03nipudasAinda não há avaliações
- IN 227 Control Systems Design: Lectures 7 and 8Documento15 páginasIN 227 Control Systems Design: Lectures 7 and 8AbhinavAinda não há avaliações
- Digital Control TutorialDocumento12 páginasDigital Control TutorialDan AnghelAinda não há avaliações
- Ee324 Exp3 ReportDocumento9 páginasEe324 Exp3 ReportSharvari MedheAinda não há avaliações
- 12 - Design Root Locus - ADocumento109 páginas12 - Design Root Locus - ANurullah MertelAinda não há avaliações
- Controller Design Using Frequency ResponseDocumento35 páginasController Design Using Frequency Responseiamketul6340Ainda não há avaliações
- Experiment 5Documento5 páginasExperiment 5Usama NadeemAinda não há avaliações
- Lab 5: Digital Phase Locked Loop (PLL) : Matlab Part: ObjectiveDocumento11 páginasLab 5: Digital Phase Locked Loop (PLL) : Matlab Part: ObjectiveThế Anh NguyễnAinda não há avaliações
- Scilab Ninja: Module 3: Classical Loopshaping DesignDocumento12 páginasScilab Ninja: Module 3: Classical Loopshaping Designorg25grAinda não há avaliações
- DSLL1Documento53 páginasDSLL1simon maaaklaAinda não há avaliações
- Gain & Phase Margin - Bode PlotDocumento28 páginasGain & Phase Margin - Bode PlotDeepthiAinda não há avaliações
- CS Unit-3Documento16 páginasCS Unit-3auchthram143Ainda não há avaliações
- Feedback in AmplifierDocumento13 páginasFeedback in Amplifierkaran007_mAinda não há avaliações
- Me 471 Phase Lead Root Locus ExampleDocumento3 páginasMe 471 Phase Lead Root Locus ExampleCristian NapoleAinda não há avaliações
- Introduction To Design: Refer Textbook Control Systems Engineering by Nagrath, GopalDocumento49 páginasIntroduction To Design: Refer Textbook Control Systems Engineering by Nagrath, GopalDeepthiAinda não há avaliações
- Controller Design Using Root Loci MethodDocumento34 páginasController Design Using Root Loci Methodiamketul6340Ainda não há avaliações
- Lec 23Documento22 páginasLec 23Khajavali ShaikAinda não há avaliações
- Lec 28Documento19 páginasLec 28BJI ALUMNIAinda não há avaliações
- Week 15 LeadLagCompensatorDocumento12 páginasWeek 15 LeadLagCompensatorAhmad Hassan FarooqiAinda não há avaliações
- NI Tutorial 6450 enDocumento11 páginasNI Tutorial 6450 enAkhil GuptaAinda não há avaliações
- IN 227 Control Systems DesignDocumento13 páginasIN 227 Control Systems DesignAbhinavAinda não há avaliações
- Digital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 38 FIR DesignDocumento18 páginasDigital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 38 FIR DesigndanielAinda não há avaliações
- 3-Module5 - CompensatorDocumento11 páginas3-Module5 - CompensatorShashankaAinda não há avaliações
- Laboratory FilesDocumento6 páginasLaboratory FilesSunil PokharelAinda não há avaliações
- Analog Integrated CircuitsDocumento47 páginasAnalog Integrated CircuitsDan GoleaAinda não há avaliações
- Week 7A - Online Classes - S2020Documento16 páginasWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiAinda não há avaliações
- CEIC3006 Lab 2 ReportDocumento18 páginasCEIC3006 Lab 2 ReportAdzamAinda não há avaliações
- Plotting Root Locus For DC Motor Position Control: M-FileDocumento12 páginasPlotting Root Locus For DC Motor Position Control: M-FileEhab AL-HialyAinda não há avaliações
- Expt 4 First Order SystemDocumento4 páginasExpt 4 First Order SystemAngelo Legarda De CastroAinda não há avaliações
- IN 227 Control Systems DesignDocumento12 páginasIN 227 Control Systems DesignAbhinavAinda não há avaliações
- Class Test 2 2023 MemoDocumento9 páginasClass Test 2 2023 MemoStalin KosterAinda não há avaliações
- Control Manual Lab 11 PDFDocumento14 páginasControl Manual Lab 11 PDFMuhammad ShayanAinda não há avaliações
- Discrete Controller: DesignDocumento43 páginasDiscrete Controller: DesignArif HassanAinda não há avaliações
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)No EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Ainda não há avaliações
- Circuits Virtual LabDocumento2 páginasCircuits Virtual LabPaula GómezAinda não há avaliações
- 8th and 9th Houses PDFDocumento3 páginas8th and 9th Houses PDFtechkasambaAinda não há avaliações
- AT Lab Experiment 3 Morse TestDocumento5 páginasAT Lab Experiment 3 Morse TestADITYA DWIVEDIAinda não há avaliações
- Condition Monitoring of Pumps - How To Save Three Ways: Session OneDocumento35 páginasCondition Monitoring of Pumps - How To Save Three Ways: Session OneJorge FracaroAinda não há avaliações
- Is B or H The Fundamental Magnetic FieldDocumento8 páginasIs B or H The Fundamental Magnetic FieldcfsenelAinda não há avaliações
- Finding The Right Materials ESPDocumento8 páginasFinding The Right Materials ESPEdison Dela Cruz Jr.100% (1)
- Window Pane Reflection ProblemDocumento8 páginasWindow Pane Reflection ProblemLee GaoAinda não há avaliações
- 21st Bomber Command Tactical Mission Report 64, 65, OcrDocumento57 páginas21st Bomber Command Tactical Mission Report 64, 65, OcrJapanAirRaidsAinda não há avaliações
- PDFDocumento764 páginasPDFDe JavuAinda não há avaliações
- Building DesignDocumento68 páginasBuilding DesignRafael Lemos100% (1)
- Examples V4.1 PDFDocumento39 páginasExamples V4.1 PDFgerAinda não há avaliações
- Project Mana Session 1 (With Practice)Documento59 páginasProject Mana Session 1 (With Practice)Harper LamAinda não há avaliações
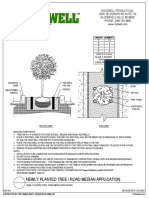
- Newly Planted Tree / Road Median ApplicationDocumento1 páginaNewly Planted Tree / Road Median ApplicationmooolkaAinda não há avaliações
- Bending Moment PresentationDocumento21 páginasBending Moment PresentationRiethanelia UsunAinda não há avaliações
- Data 6005ADocumento1 páginaData 6005AErick De La RoSaAinda não há avaliações
- Performance-Based Engineering of Wood Frame Housing: Fragility Analysis MethodologyDocumento7 páginasPerformance-Based Engineering of Wood Frame Housing: Fragility Analysis MethodologyJuanGrandonGoddardAinda não há avaliações
- STPM 954 Math T Coursework 2013 Sem 2Documento8 páginasSTPM 954 Math T Coursework 2013 Sem 2vtdvkkjbf100% (2)
- Exam2SampleProblems SP17 - 1507832832437Documento5 páginasExam2SampleProblems SP17 - 1507832832437rohitrgt4uAinda não há avaliações
- TKL Pump - Data - SheetDocumento1 páginaTKL Pump - Data - Sheetธนาชัย เต็งจิรธนาภาAinda não há avaliações
- Lesson Plan Letter MDocumento3 páginasLesson Plan Letter Mapi-307404579Ainda não há avaliações
- Iready at Home Activity Packets Student Math Grade 5 2020Documento32 páginasIready at Home Activity Packets Student Math Grade 5 2020Jennifer HongAinda não há avaliações
- Elastic CollisionDocumento1 páginaElastic CollisionTeo Hui pingAinda não há avaliações
- Review of The Rebound Hammer Method-1Documento26 páginasReview of The Rebound Hammer Method-1Mr. Jitender KumarAinda não há avaliações
- Asus X550JF x550jxDocumento7 páginasAsus X550JF x550jxCiprian BalalauAinda não há avaliações
- Argidius Call For BDS ProposalDocumento8 páginasArgidius Call For BDS ProposalEmmanuel Alenga MakhetiAinda não há avaliações
- Bushman 2005Documento8 páginasBushman 2005SOULAIMANE EZZOUINEAinda não há avaliações
- Wmwbqi J Cix Vi Cökœ de "Qvwi 2015-Avm÷ 2022Documento17 páginasWmwbqi J Cix Vi Cökœ de "Qvwi 2015-Avm÷ 2022JuwelAinda não há avaliações
- Akash IntenshipDocumento28 páginasAkash IntenshipAkash TaradaleAinda não há avaliações