Você também pode gostar
- Apuntes de EjerciciosDocumento41 páginasApuntes de EjerciciosAlejandro MorenoAinda não há avaliações
- Pro ModelDocumento53 páginasPro ModelIng Rafael LemusAinda não há avaliações
- 13-1-Promodel-Ensamblaje JOINDocumento29 páginas13-1-Promodel-Ensamblaje JOINGersonIparraguirreGenovesAinda não há avaliações
- Flexim Problema01Documento3 páginasFlexim Problema01Luis Anibal VergaraAinda não há avaliações
- INTRODUCCION A LOS PLC - v12Documento28 páginasINTRODUCCION A LOS PLC - v12Ing. Bendryx BelloAinda não há avaliações
- Diferencia Entre Scada y HmiDocumento1 páginaDiferencia Entre Scada y HmiEduardo Vega ChavezAinda não há avaliações
- Unidad 3 Manufactura EsbeltaDocumento132 páginasUnidad 3 Manufactura EsbeltahhuisaAinda não há avaliações
- Sistemas de Comunicacion IndustrialDocumento2 páginasSistemas de Comunicacion Industrialanferol1Ainda não há avaliações
- Robot Industrial Pesado y Manufactura PDFDocumento5 páginasRobot Industrial Pesado y Manufactura PDFAndres BatistaAinda não há avaliações
- 02 - Introducción LogixPro PLC - AllenBradley - (2019.1) Grupo 3Documento18 páginas02 - Introducción LogixPro PLC - AllenBradley - (2019.1) Grupo 3Jhonatan Junior Villasante RoqueAinda não há avaliações
- Automatizacion Normas NEMADocumento17 páginasAutomatizacion Normas NEMABRYAN FERNANDO CARVAJAL TORRESAinda não há avaliações
- Manual de Robot Con Compuertas LogicasDocumento32 páginasManual de Robot Con Compuertas LogicasClintonSemanate0% (1)
- Controladores Lógicos Programables PDFDocumento11 páginasControladores Lógicos Programables PDFarthurpumpAinda não há avaliações
- Dispositivos Logicos Programables (PLDS)Documento16 páginasDispositivos Logicos Programables (PLDS)Yhony LuqueAinda não há avaliações
- Aplicaciones de Los RobotsDocumento9 páginasAplicaciones de Los RobotsharoldAinda não há avaliações
- Demand Flow Technology FinalDocumento27 páginasDemand Flow Technology FinalFanny ChamorroAinda não há avaliações
- Practica1 AutoDocumento6 páginasPractica1 AutoByronXGuillinMAinda não há avaliações
- Linea de Tiempo de La ManufacturaDocumento11 páginasLinea de Tiempo de La ManufacturajorgeAinda não há avaliações
- Unidad 5 Sistemas de ManufacturaDocumento11 páginasUnidad 5 Sistemas de ManufacturaJesus Morales MarroquinAinda não há avaliações
- Implementacion Controlador Pid para Un Circuito ElectronicoDocumento11 páginasImplementacion Controlador Pid para Un Circuito ElectronicoAndres GeovannyAinda não há avaliações
- Manufactura FlexibleDocumento4 páginasManufactura FlexibleTtrraanneeOonneeAinda não há avaliações
- Modos de TransporteDocumento14 páginasModos de TransporteAmber RodriguezAinda não há avaliações
- Tipos de PlcsDocumento4 páginasTipos de Plcssuen changAinda não há avaliações
- Practicas Unidad 1 PLCDocumento7 páginasPracticas Unidad 1 PLCAngel NgAinda não há avaliações
- Módulo EM 235Documento8 páginasMódulo EM 235Alex TipantuñaAinda não há avaliações
- Interfasez en VHDLDocumento12 páginasInterfasez en VHDLLuis SantiagoAinda não há avaliações
- 1.1 Definiciones y Conceptos - 1.2 Sistemas Lazo Abierto y CerradoDocumento16 páginas1.1 Definiciones y Conceptos - 1.2 Sistemas Lazo Abierto y CerradoXavier HernánAinda não há avaliações
- El Control de 2 Motores Con El TB6612FNGDocumento14 páginasEl Control de 2 Motores Con El TB6612FNGValeria Hernandez ChavezAinda não há avaliações
- Sistemas Integrales de ManufacturaDocumento16 páginasSistemas Integrales de ManufacturaEmanuel Alberto Rendon AvilaAinda não há avaliações
- Ambiente Integrado Del DesarrolloDocumento2 páginasAmbiente Integrado Del DesarrolloAlma LunaAinda não há avaliações
- Sensores OptiCosDocumento52 páginasSensores OptiCosCesar VeraAinda não há avaliações
- Mantenimiento 4.0Documento14 páginasMantenimiento 4.0Lisbett CorderoAinda não há avaliações
- Examen de Diagnostico NeumaticaDocumento8 páginasExamen de Diagnostico NeumaticaChristian C. SandovalAinda não há avaliações
- HMIDocumento5 páginasHMIVanessa Sandoval AguileraAinda não há avaliações
- Curso Basico MicrocontroladoresDocumento183 páginasCurso Basico MicrocontroladoresYerminson ToroAinda não há avaliações
- Curso Electronica IndustrialDocumento688 páginasCurso Electronica IndustrialjoserobertosolanoAinda não há avaliações
- Fabricación de Circuitos Integrados A Partir de ArenaDocumento13 páginasFabricación de Circuitos Integrados A Partir de ArenaKaren Marycielo CharrezAinda não há avaliações
- Tipos de PLCDocumento5 páginasTipos de PLCIvànn NuñezAinda não há avaliações
- Sistemas Avanzados de ManufacturaDocumento37 páginasSistemas Avanzados de ManufacturaKarla AvilaAinda não há avaliações
- Capitulo - 1.modelado GeometricoDocumento36 páginasCapitulo - 1.modelado GeometricoErashiiDiiAinda não há avaliações
- Unidad 1 Dispositivos ElectromecanicosDocumento30 páginasUnidad 1 Dispositivos ElectromecanicosMaria Ysabel Lopez Sanchez0% (1)
- Apuntes U2 PLCDocumento21 páginasApuntes U2 PLCMichel Bielma100% (4)
- Clasificacion de PLCDocumento7 páginasClasificacion de PLCFlavio Gallegos HernandezAinda não há avaliações
- Clase IIDocumento45 páginasClase IIhober monjeAinda não há avaliações
- PLCDocumento16 páginasPLCDaniel JacksonAinda não há avaliações
- Informe Programación de PLCDocumento15 páginasInforme Programación de PLCSebastián Andrés Segovia TapiaAinda não há avaliações
- TareaDocumento4 páginasTareaJUAN ORTIZ PALOMINOAinda não há avaliações
- Fundamentos y Caracteristicas de PLC SIEMENSDocumento64 páginasFundamentos y Caracteristicas de PLC SIEMENSKevin Dario Noriega VieraAinda não há avaliações
- Evaluacion de ConocimeintosDocumento3 páginasEvaluacion de ConocimeintosDaniel ArgumedoAinda não há avaliações
- Unidad 2 PLC Investigacion FLDocumento12 páginasUnidad 2 PLC Investigacion FLRaul Alexis GarciaAinda não há avaliações
- Cap1 BDocumento14 páginasCap1 BLuis MamaniAinda não há avaliações
- T1.2 El Controlador Lógico Programable (PLC)Documento46 páginasT1.2 El Controlador Lógico Programable (PLC)Dick reyesAinda não há avaliações
- PLC)Documento16 páginasPLC)Jorgeluis Qpz100% (2)
- Tarea 1Documento5 páginasTarea 1JUAN ORTIZ PALOMINOAinda não há avaliações
- Tarea 1Documento5 páginasTarea 1JUAN ORTIZ PALOMINOAinda não há avaliações
- 4.3 Funcionamiento y Caracteristicas de Un PLCDocumento2 páginas4.3 Funcionamiento y Caracteristicas de Un PLCOsbert JimenezAinda não há avaliações
- Introducción Al Curso RsLogix 5000 y Conceptos Básicos.Documento11 páginasIntroducción Al Curso RsLogix 5000 y Conceptos Básicos.TNastecaAinda não há avaliações
- PLC 01 IntroducciónDocumento45 páginasPLC 01 Introducciónwcano_10Ainda não há avaliações
- PLCDocumento26 páginasPLCWalter ZurbrigkAinda não há avaliações
- Introduccion RSLOGIX 500Documento19 páginasIntroduccion RSLOGIX 500JorgeRodríguezAinda não há avaliações
- Proyecto LoDocumento159 páginasProyecto LoAlvaro Cabezas TorrezAinda não há avaliações
- 3 Taller de Rebobinado de Maquinas Electricas-Emi Noche 1Documento7 páginas3 Taller de Rebobinado de Maquinas Electricas-Emi Noche 1Alvaro Cabezas TorrezAinda não há avaliações
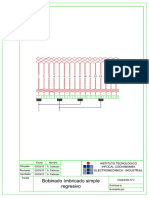
- Bobinado Imbricado Regresivo PDFDocumento1 páginaBobinado Imbricado Regresivo PDFAlvaro Cabezas TorrezAinda não há avaliações
- Bobinado Imbricado RegresivoDocumento1 páginaBobinado Imbricado RegresivoAlvaro Cabezas TorrezAinda não há avaliações
- Embobinado de CC Con Conexiones Equipotenciales de 1 ClaseDocumento1 páginaEmbobinado de CC Con Conexiones Equipotenciales de 1 ClaseAlvaro Cabezas TorrezAinda não há avaliações
- Plantilla para La Reflexión Sobre Mis AprendizajesDocumento2 páginasPlantilla para La Reflexión Sobre Mis AprendizajesAlvaro Cabezas TorrezAinda não há avaliações
- Practica #2 Uso Del Multimetro DigitalDocumento6 páginasPractica #2 Uso Del Multimetro DigitalAlvaro Cabezas TorrezAinda não há avaliações
- Boletin Leyden Compensacion Del Factor de PotenciaDocumento13 páginasBoletin Leyden Compensacion Del Factor de PotenciaAlvaro Cabezas Torrez100% (1)
- Normas Tecnicas de ViviendaDocumento51 páginasNormas Tecnicas de ViviendaAlvaro Cabezas Torrez67% (6)
- Plataforma TI de Vigilancia Entomológica Del Aedes AegyptiDocumento19 páginasPlataforma TI de Vigilancia Entomológica Del Aedes AegyptiIriana MoreiraAinda não há avaliações
- Guia 1 Conceptos Basicos de Excel Grado 6°Documento12 páginasGuia 1 Conceptos Basicos de Excel Grado 6°Dayan RousseAinda não há avaliações
- Comando SSHDocumento4 páginasComando SSHGheraldine MontañezAinda não há avaliações
- La Función BUSCARH en ExcelDocumento5 páginasLa Función BUSCARH en ExcelmanerivAinda não há avaliações
- Guia Rapida Pathfinder OfficeDocumento3 páginasGuia Rapida Pathfinder OfficeJoséDavid Baena SerranoAinda não há avaliações
- Fase1 TelecontrolDocumento12 páginasFase1 TelecontrolMi Lista de Reproduccion ListaAinda não há avaliações
- Algebra JuegoDocumento10 páginasAlgebra JuegoAlbe VicAinda não há avaliações
- Ig en GoogleDocumento20 páginasIg en Googletatis.re.11Ainda não há avaliações
- Investigacion2 SSH SNMP NTPDocumento2 páginasInvestigacion2 SSH SNMP NTPOscar LeónAinda não há avaliações
- Diseño de Losas Con Vigueta y BovedillaDocumento6 páginasDiseño de Losas Con Vigueta y BovedillaMariano DiazAinda não há avaliações
- Algoritmo de KruskalDocumento19 páginasAlgoritmo de KruskalPabloValenciaAinda não há avaliações
- 41 Manual Hidroneumático 24 Litros Con Bomba 41Documento8 páginas41 Manual Hidroneumático 24 Litros Con Bomba 41CastoriadisAinda não há avaliações
- T2 Programación PythonDocumento92 páginasT2 Programación PythonsararodblaAinda não há avaliações
- Convocatoria Betcon 2017Documento6 páginasConvocatoria Betcon 2017Teddy Ubaldo Machicado TitoAinda não há avaliações
- SRWE - Module - 1 (Resúmen)Documento51 páginasSRWE - Module - 1 (Resúmen)Yorvin MendezAinda não há avaliações
- Presentación 8Documento10 páginasPresentación 8Angel Rafael Ogando VenturaAinda não há avaliações
- AritmÉtica BinariaDocumento25 páginasAritmÉtica Binariaibleidx100% (8)
- Guia de Recomendaciones para Visitas Virtuales PDFDocumento18 páginasGuia de Recomendaciones para Visitas Virtuales PDFfernando sAinda não há avaliações
- Sesión02 - Cómo Abrir Un CibercaféDocumento27 páginasSesión02 - Cómo Abrir Un CibercaféjjleivaAinda não há avaliações
- Evaluacion Final - Escenario 8 - SEGUNDO BLOQUE-TEORICO - MODELOS DE TOMA DE DECISIONES - (GRUPO B03)Documento7 páginasEvaluacion Final - Escenario 8 - SEGUNDO BLOQUE-TEORICO - MODELOS DE TOMA DE DECISIONES - (GRUPO B03)Juliana PatiñoAinda não há avaliações
- Paso 5 Grupo 212026 - 8Documento17 páginasPaso 5 Grupo 212026 - 8julio sorianoAinda não há avaliações
- Analisis Socioeconómico EcuadorDocumento7 páginasAnalisis Socioeconómico EcuadorCristian David PachacamaAinda não há avaliações
- Evaluacion Sumativa N°2 Diseño de Tronadura PDFDocumento4 páginasEvaluacion Sumativa N°2 Diseño de Tronadura PDFClaudio AndrésAinda não há avaliações
- 1.1. Evolucion de La Conservacion IndustrialDocumento12 páginas1.1. Evolucion de La Conservacion IndustrialOsvaldo MonroyAinda não há avaliações
- El Laboratorio de InformáticaDocumento28 páginasEl Laboratorio de Informáticafabianp200850% (2)
- Atender Situaciones de Crisis de Acuerdo Con Planes de Emergencia y Normativa TécnicaDocumento2 páginasAtender Situaciones de Crisis de Acuerdo Con Planes de Emergencia y Normativa TécnicaLuis Castrillon OspinaAinda não há avaliações
- Convertidor Monofásico Completo y DualDocumento4 páginasConvertidor Monofásico Completo y DualEduardo PeresAinda não há avaliações
- Instrumentación Gestión de Proyectos de SWDocumento11 páginasInstrumentación Gestión de Proyectos de SWAriamgelAinda não há avaliações
- Mmdi U3 A3 CempDocumento8 páginasMmdi U3 A3 CempCesar MorgadoAinda não há avaliações
- Actividad Grupo 3 Salarios Tabla DinamicaDocumento6 páginasActividad Grupo 3 Salarios Tabla DinamicaSandra PizaAinda não há avaliações