Você também pode gostar
- Armónicas en Sistemas Eléctricos IndustrialesNo EverandArmónicas en Sistemas Eléctricos IndustrialesNota: 4.5 de 5 estrelas4.5/5 (12)
- PWM Con LabViewDocumento71 páginasPWM Con LabViewBenito SanchezAinda não há avaliações
- Introduccion A Labview en 6 HorasDocumento93 páginasIntroduccion A Labview en 6 HorasjormaeherAinda não há avaliações
- Control Convertidores de PotenciaDocumento31 páginasControl Convertidores de PotenciaJose Luis Mata LedesmaAinda não há avaliações
- Técnicas LabVIEW para máximo rendimientoDocumento44 páginasTécnicas LabVIEW para máximo rendimientoCecilio Marcos ValenciaAinda não há avaliações
- TL494Documento6 páginasTL494MarcioRodriguezAinda não há avaliações
- Lab. 1 Electronica de PotenciaDocumento5 páginasLab. 1 Electronica de PotenciaRene ReynaAinda não há avaliações
- Convertidor Reductor Con Rectificacion SincronaDocumento162 páginasConvertidor Reductor Con Rectificacion SincronaAndres Miguel Juarez100% (1)
- InversoresDocumento55 páginasInversorescalhoundoom100% (1)
- Guía de Laboratorio 2 - Convertidores AC - DC No Controladdos Con Carga RLDocumento6 páginasGuía de Laboratorio 2 - Convertidores AC - DC No Controladdos Con Carga RLKaren Padilla Guzmán100% (1)
- Diseño Del Convertidor Inversor CDDocumento25 páginasDiseño Del Convertidor Inversor CDDavid SanchezAinda não há avaliações
- Desarrollo3 tl494Documento10 páginasDesarrollo3 tl494bob75100% (1)
- Encoder Incremental-Anáilis de Metodologías de DecodificaciónDocumento22 páginasEncoder Incremental-Anáilis de Metodologías de DecodificaciónAc's NightmaresAinda não há avaliações
- Lab 2 MaquinasDocumento6 páginasLab 2 MaquinasAnonymous AUTTUBAinda não há avaliações
- Matlab ControlDocumento7 páginasMatlab ControlFernando Martínez FernándezAinda não há avaliações
- Lazos de Corriente 4 A 20 MaDocumento15 páginasLazos de Corriente 4 A 20 MaJoseph Manuel Chamochumbi IndaraAinda não há avaliações
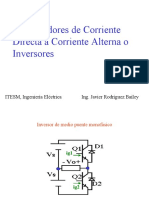
- Inversor de Medio PuenteDocumento23 páginasInversor de Medio PuenteJulio Cesar VazquezAinda não há avaliações
- BJTDocumento21 páginasBJTJose PalomoAinda não há avaliações
- Introduccion A La Electronica de Potencia DIAPOSitivasDocumento21 páginasIntroduccion A La Electronica de Potencia DIAPOSitivasJefferson A. Peña Velasquez100% (1)
- Trabajo de Convertidor Buck Simulación y GalvanizadoDocumento9 páginasTrabajo de Convertidor Buck Simulación y GalvanizadoDavid DavidAinda não há avaliações
- Manual Novus 1100Documento9 páginasManual Novus 1100Rodrigo Alfonso Grego GazaleAinda não há avaliações
- Oscilador y Detector de TonosDocumento8 páginasOscilador y Detector de TonosGuillermo HernandezAinda não há avaliações
- Inversor Trifásico 120 GradosDocumento16 páginasInversor Trifásico 120 GradosCésar Guzmán100% (3)
- Disparo DC Con SCRDocumento4 páginasDisparo DC Con SCRLuigi875421100% (1)
- TL494Documento18 páginasTL494Nelly ChaconAinda não há avaliações
- VDF Diseño de Variador de Frecuencia.Documento21 páginasVDF Diseño de Variador de Frecuencia.Christián Silva AguilarAinda não há avaliações
- FUENTEPODER tl494 PDFDocumento46 páginasFUENTEPODER tl494 PDFFran Garzzia100% (1)
- Que Es Un DSPDocumento2 páginasQue Es Un DSPHiuston Cueto CcoriAinda não há avaliações
- Regulador DNPDocumento16 páginasRegulador DNPАртемAinda não há avaliações
- PLC SiemensDocumento17 páginasPLC SiemensEleazarAinda não há avaliações
- Asignación 1 Inversor Medio Puente Con Tensión de Salida RectangularDocumento5 páginasAsignación 1 Inversor Medio Puente Con Tensión de Salida RectangularElcheto GuerreroAinda não há avaliações
- Informe04 Electronica de PotenciaDocumento9 páginasInforme04 Electronica de PotenciaTony CamposAinda não há avaliações
- Interruptores Schneider Electric PDFDocumento68 páginasInterruptores Schneider Electric PDFjhonnyAinda não há avaliações
- Influencia de Armónicos en El Factor de Potencia de Una Instalación Eléctrica Y en Su CompensacióDocumento5 páginasInfluencia de Armónicos en El Factor de Potencia de Una Instalación Eléctrica Y en Su CompensacióthormikeAinda não há avaliações
- Partida Inversor de Marcha Sin Pasar Por ParoDocumento15 páginasPartida Inversor de Marcha Sin Pasar Por ParoJulio Jt El FatalitooxxAinda não há avaliações
- Respuesta de circuitos RLC a señales: equipo autónomo didácticoDocumento200 páginasRespuesta de circuitos RLC a señales: equipo autónomo didácticoKevin PachecoAinda não há avaliações
- Lab. N°2 - Informe Final-Electronica de Potencia 1 - Rectificadores ControladosDocumento3 páginasLab. N°2 - Informe Final-Electronica de Potencia 1 - Rectificadores ControladosBLANCO ZAMBRANO KEVIN JOEL100% (1)
- Informe Pantalla HMIDocumento5 páginasInforme Pantalla HMIjeanAinda não há avaliações
- Práctica 5 Electronica de Potencia PDFDocumento5 páginasPráctica 5 Electronica de Potencia PDFAnonymous MvRbkeTVUAinda não há avaliações
- 4 OK LAB 1 Circuito Oscilador de Relajación Con UJT 2N2646Documento2 páginas4 OK LAB 1 Circuito Oscilador de Relajación Con UJT 2N2646Stephen Bardales CáceresAinda não há avaliações
- PWM 2Documento7 páginasPWM 2Menaly Luzuriaga MoranAinda não há avaliações
- Sistema integración oficial declaración objetivos ASINPRODocumento38 páginasSistema integración oficial declaración objetivos ASINPRORudy Glausser100% (1)
- Prac 9 EpDocumento22 páginasPrac 9 EpmoisesAinda não há avaliações
- Laboratorio 2 PLCDocumento8 páginasLaboratorio 2 PLCJose Antonio Bellido Vargas100% (1)
- Interruptor de Estado SólidoDocumento4 páginasInterruptor de Estado SólidoMichellelelelele Galicia100% (1)
- Control PID de Temperarura (Analógico)Documento6 páginasControl PID de Temperarura (Analógico)Rafael Aguilar RiosAinda não há avaliações
- 06 - Regulacion de Velocidad (Motores CA)Documento15 páginas06 - Regulacion de Velocidad (Motores CA)lobonortinoAinda não há avaliações
- P00 Arquitectura Del PIC18F4550Documento13 páginasP00 Arquitectura Del PIC18F4550oscar2 poma2Ainda não há avaliações
- Qué Puede Hacer Una Actualización de PLC Por Ti: Resumen Del ArtículoDocumento6 páginasQué Puede Hacer Una Actualización de PLC Por Ti: Resumen Del ArtículoJavier Alexis Rojas GomezAinda não há avaliações
- Comparador Con HisteresisDocumento7 páginasComparador Con HisteresisFrancisco Chana100% (1)
- Analisis de La Arquitectura Sallen-KeyDocumento7 páginasAnalisis de La Arquitectura Sallen-KeyMArcoAinda não há avaliações
- Encoder Mecánico de Un MauseDocumento7 páginasEncoder Mecánico de Un MauseDaniel Cristian Negretty Huarayo100% (2)
- Secuencia de Fase de Un Sistema TrifásicoDocumento11 páginasSecuencia de Fase de Un Sistema TrifásicoCarlos Vega83% (6)
- Control VectorialDocumento39 páginasControl VectorialELCTRICAL100% (1)
- Inversion de Giro Con PulsadorDocumento12 páginasInversion de Giro Con PulsadorJose VelasquezAinda não há avaliações
- Variadores de FrecuenciaDocumento37 páginasVariadores de FrecuenciaJorge RodriguezAinda não há avaliações
- Prueba 1 - Protecciones y Accionamientos Eléctricos - Wilson Bolados AlvarezDocumento16 páginasPrueba 1 - Protecciones y Accionamientos Eléctricos - Wilson Bolados AlvarezWilson BoladosAinda não há avaliações
- Motor MonofásicoDocumento9 páginasMotor MonofásicoOscar Alexandro García AriasAinda não há avaliações
- Acoplamiento de Un GeneradorDocumento7 páginasAcoplamiento de Un GeneradorOmar Ramos RamosAinda não há avaliações
- Control EscalarDocumento28 páginasControl EscalarFrancisco PachecoAinda não há avaliações
- Ing. Industrial.....Documento25 páginasIng. Industrial.....josmindAinda não há avaliações
- Informe de EnsayoDocumento11 páginasInforme de EnsayoMard TorresAinda não há avaliações
- Diálogo entre un sacerdote y un moribundoDocumento15 páginasDiálogo entre un sacerdote y un moribundoLibrepensador CatódicoAinda não há avaliações
- Sesión 5 - Ficha Con EsquemaDocumento2 páginasSesión 5 - Ficha Con EsquemaFiorella Aguilar rubioAinda não há avaliações
- Latour-La Fuerza de Un ArgumentoDocumento8 páginasLatour-La Fuerza de Un ArgumentoMicaela RendeAinda não há avaliações
- Auditoría de Gestión Al Programa Del Vaso de LecheDocumento7 páginasAuditoría de Gestión Al Programa Del Vaso de LecheElías Jerry Churata Curo0% (1)
- Novela RegionalistaDocumento13 páginasNovela RegionalistasakriAinda não há avaliações
- 6TO Grado Planificación de BibliotecaDocumento3 páginas6TO Grado Planificación de Bibliotecalisbeth del Carmen Valecillos0% (1)
- Determinación de la viscosidad de un fluido newtoniano entre placas paralelasDocumento4 páginasDeterminación de la viscosidad de un fluido newtoniano entre placas paralelasyhorki mamani letonaAinda não há avaliações
- CEH v10 Module 19 - Cloud Computing ESDocumento25 páginasCEH v10 Module 19 - Cloud Computing ESKaren GarzaAinda não há avaliações
- Ensayo Confiabilidad de Las SoldadurasDocumento8 páginasEnsayo Confiabilidad de Las SoldadurasJulian Fernando Carvajal MartinezAinda não há avaliações
- Estudio HidrologicoDocumento13 páginasEstudio HidrologicoRaul CuaylaAinda não há avaliações
- EXT 4LoCMowkHmFcin9sqOsDDocumento3 páginasEXT 4LoCMowkHmFcin9sqOsDDaniel CamposAinda não há avaliações
- Parametros de DiseñoDocumento7 páginasParametros de DiseñoRoberto Carlos Soldado ZapanaAinda não há avaliações
- HermiteDocumento38 páginasHermiteSebastián Camilo Menjura FlorianAinda não há avaliações
- TDRDocumento10 páginasTDRSergio SotoAinda não há avaliações
- La Fuerza en 1 Hoja Savage WorldsDocumento2 páginasLa Fuerza en 1 Hoja Savage WorldsKhulmaneAinda não há avaliações
- Universidad MedLa Universidad Clásica Medieval, Origen de La Universidad LatinoamericanaDocumento21 páginasUniversidad MedLa Universidad Clásica Medieval, Origen de La Universidad LatinoamericanaCamilo BarrigaAinda não há avaliações
- Sesión de Aprendizaje Magnitudes Proporcionales 1° SecundariaDocumento3 páginasSesión de Aprendizaje Magnitudes Proporcionales 1° SecundariaJuan Diego Agustin VasquezAinda não há avaliações
- Problemas de Estructuras CristalinasDocumento4 páginasProblemas de Estructuras CristalinasjoseAinda não há avaliações
- Neuroimagen-Técnicas y Procesos CognitivosDocumento1 páginaNeuroimagen-Técnicas y Procesos CognitivosCarlos López Noriega100% (1)
- Se Esta Muriendo La Escuela ScialabbaDocumento6 páginasSe Esta Muriendo La Escuela ScialabbaJuan Manuel Luján SotoAinda não há avaliações
- Practica #1 Matemática AplicadaDocumento3 páginasPractica #1 Matemática AplicadaNatt GutiérrezAinda não há avaliações
- Castigat Ridendo MoresDocumento12 páginasCastigat Ridendo MoresDesiluetas ViernesAinda não há avaliações
- Test Entrevista de Trabajo Christopher MontaldoDocumento3 páginasTest Entrevista de Trabajo Christopher MontaldoJose Pacheco0% (1)
- Historia y clasificación de la lógica matemáticaDocumento47 páginasHistoria y clasificación de la lógica matemáticaPiero Solano SosaAinda não há avaliações
- Instalación PMBDocumento4 páginasInstalación PMBDIANA ORJUELAAinda não há avaliações
- Examen Extraordinario de Secundaria FCyE LL 3° 2014Documento6 páginasExamen Extraordinario de Secundaria FCyE LL 3° 2014Monica Castillo93% (14)
- Materiales AdsorbentesDocumento10 páginasMateriales AdsorbentesJulian AldanaAinda não há avaliações