Escolar Documentos
Profissional Documentos
Cultura Documentos
Eletronica Industrial
Enviado por
Carlos Gomes FontinelleDireitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Eletronica Industrial
Enviado por
Carlos Gomes FontinelleDireitos autorais:
Formatos disponíveis
UNIVATES
CURSO DE TCNICO DE ELETRNICA
DE NVEL MDIO,COM
NFASE EM MANUTENO DE TELEMTICA
DISCIPLINA: ELETRNICA INDUSTRIAL
CONTEDOS
A) AMPLIFICADORES E COMPARADORES
B) TIRISTORES
C) SCRS
D) TRIACS
E) TUJS
F) CIS 555
G) CIS PLL
H) CONTROLADORES
I) CIS ESPECIAIS
Carga Horria Total : 60 horas
Professor: Robson Schaeffer
1
Esta disciplina represent a a continuao dos estudos de eletrnica,
iniciados em Eletrnica I e seguidos da II. Aqui vamos conhecer mais
alguns component es alm dos j conhecidos resistores, capacit ores,
indut ores, diodos, transi st ores e amplificadores operacionais. Os
component es que vamos estudar em Eletrnica Indust rial so os aplicados
na interface dos sistemas de cont role com as mquinas e dispositivos de
uso indust rial. Tambm veremos, alm dos component es, alguns
equipament os de uso indust rial.
A) AMPLIFICADORES E COMPARADORES
Recapit ulando o que vimos : Amplificadores operacionai s so
component es muito versteis, que tem aplicaes bem variadas, sendo
teis em toda eletrnica de cont role. As cinco caractersticas fundament ais
dos operacionai s so:
Impedncia de entrada infinita;
Impedncia de sada zero;
Ganho infinito em lao abert o;
Banda passant e infinita;
Balanceament o perfeit o entre as entradas.
Existem operacionais dedicados a aplicaes especficas, com const r uo
interna diferenciada para atender requisitos determi nados de performance,
tais como banda larga, baixo rudo, alto slew rate , etc. Uma classe
especial de amplificadores operacionais a dos comparadores.
J vimos os amplificadores diferenciais, que usam as duas entradas,
inversora e no- inversora, e amplificam a diferena. Podemos considerar
os comparadores como um tipo especial de amplificador diferencial. Eles
servem como blocos teis em sistemas analgicos ou hbridos
(analgicos/ digit ais) respondendo pergunt a: A entrada analgica maior
ou menor que o sinal analgico de referncia ?
Um comparador pode ser feito a partir de um operacional padro, tipo o
741, desde que o usemos sem realiment ao, ou seja em lao aberto. Nesta
configurao o ganho elevadssimo e qualquer diferena entre as duas
entradas do Opamp ser amplificada milhares de vezes. Assim se
mantivermos, por exemplo a entrada inversora aterrada, basta uma tenso
muit o pequena na entrada no- inversora para levar o operacional
saturao. Em Eletrnica II vimos que um 741 alimentado por + e - 10V
tem sua sada limitada em +/ - 9 V. Tambm vimos que seu AV
OL
=
100000. Portant o, para termos a sada limitada em 9V, bast a termos na
entrada no- inversora 9V/100000 = 90V. O que significa que basta a
2
entrada + estar 90 V acima do terra para levar o 741 saturao positiva
ou estar a 90 V abaixo do terra para levar o 741 saturao negativa.
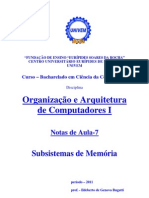
A figura abaixo ilustra o circuito tpico do comparador com operacional.
V s a i
V i n
+
Figura 1 - Comparador
O grfico direita ilustra a sada em funo da entrada. Como a entrada
inversora esta aterrada (em zero volts), a comut ao da sada acontece em
torno do zero. Por isto chamamos este circuito de detetor de passagem por
zero. Podemos facilment e alterar este pont o de mudana de estado do
comparador simplesment e conectando um divisor de tenso entrada
inversora. Desta forma quando Vin for maior que a tenso de referncia
aplicada entrada inversora, a sada do compar ador ser positiva. A
tenso de referncia para fins de compar ao pode ser positiva ou
negativa, se dispuser mos de alimentaes simtricas. Os sinais de entrada
e de referncia podem ser tenses ou corrent es. Este circuito comument e
chamado de detetor de limite, pois nos diz se a entrada superior ou
inferior a um limite (a tenso de referncia).
Nos casos de aliment ao com fonte nica (carros, etc..) podemos usar as
mesmas tcnicas, s que a sada do operacional ficar limitada entre algo
acima do zero e um pouco abaixo do VCC, como ilustra o grfico abaixo:
Vsai
Vin Fig 2 - Comparador com fonte nica
Vref
Quando a entrada for superior referncia, a sada vai a nvel alto (1) e
esta sada pode ser usada como entrada numa porta lgica, por exemplo,
ou para acionar algum element o de controle ou mecanismo de segurana.
3
Vin
Vs ai
Os comparador es so muito usados como interfaces entre o mundo
analgico e o digital.
At agora falamos de usar operacionais como comparadores, mas existem
circuit os integrados projet ados e constru dos especificament e para
funcionarem como comparadores. Os operacionai s, principalment e os de
uso geral como o 741 tentam atender todos os requisitos para amplificao
de sinais. Os comparadores tem caractersticas especficas para executar
sua funo. Uma das caractersticas mais marcant es para diferenciar um
operacional de um comparador o slew rate. Como os operacionais tem
que atender requisit os de banda passant e e estabilidade do ganho em
freqncia, eles possuem os capacitores de compensao em freqncia.
Isto ajuda muito neste aspectos, mas quando queremos que a sada mude
rapidament e de um a estado a outro, estas capacitncias de compensao
causam um atraso e limitam a taxa de variao do sinal. Num comparador
esta limitao no desejvel. Devido principal ment e a este fator os CIs
comparadores so fabricados diferent ement e dos operacionai s.
Outra caracterstica dos comparador es que os diferencia dos Opamp no
estgio de sada. Os operacionais no conseguem ir a zero, nem a VCC na
sada, por carat ersticas internas de seus circuitos. Para garantir uma maior
confiabilidade nos circuitos de interface, os comparador es tem seu estgio
de sada um transist or como chave, em coletor aberto. Isto significa que
precisamos conect ar a sada do comparador aliment ao (VCC) atravs
de um resistor, chamado de pullup resistor. Este resist or eleva a tenso
de sada VCC quando o transist or de sada estiver cortado. No outro
estado, transi st or sat urado, a sada ser bem prxima de zero (0,2 a 0,3V).
Num operacional tipo 741 difcil a sada ir a menos de 1V se ele for
aliment ado com fonte nica. O circuit o abaixo most ra o estgio de sada
em coletor abert o e um resistor tpico de pullup de 1K que ligado do VCC
ao pino de sada:
S a d a d o
d i f e r e n c i a l
P i n o s a d a
1k
+V
5V
NPN
Figura 3 - Sada coletor aberto
Um dos comparador es mais popul ares no mercado mundi al o LM339, um
CI de 14 pinos com 4 comparadores dentro (quad comparat or). Ele possui
sada em coletor abert o. Este tipo de comparador tem um tempo
aproximado de chaveament o em torno de 1 s.
Abaixo most ramos um circuito tpico com o LM339 para interface com
sinais digitais CMOS ou TTL.
4
Vsai
+10V
+10V
+V
5V
R1
R2
1k
Vent LM339
Figura 4 - Circuito tpico de comparador com LM339
Neste circuit o a sada ser zero enquant o a tenso de entrada Vent for
inferior tenso de referncia Vref dada pelo divisor entre R1 e R2 ( Vref
= x 10V). Quando a tenso de entrada ultrapassar Vref a sada vira para
nvel 1, neste caso 5V, adequado tanto para TTL como para CMOS.
COMPARADOR DE JANELA (SCHMITT TRIGGER)
Como o comparador muda rapidament e de estado, se o sinal de entrada
estiver perto do sinal de referncia e apresent ar algum rudo, a sada do
comparador pode ficar virando de um estado a outro devido ao rudo. Para
evitar isto e tambm para muit as aplicaes indust riais, foi invent ado um
circuit o de comparador que usa realiment ao positiva para causar uma
mudana brusca de estado na sada, que foi chamado de Schmitt trigger.
Este circuito tambm chamado de comparador regenerativo, pois usa a
realiment ao positiva para assegurar uma mudana de estado rpida.
Quando a tenso na entrada atinge o limiar, ou pont o de disparo (trigger) a
mudana brusca, com tempo de transio muito pequeno. Esta a
caracterstica principal do Schmitt trigger. Normal ment e a esta
caracterstica est associada uma outra chamada de histerese.
HISTERESE = Diferena na respost a de um sistema ou component e a um
sinal que est aument ando ou diminuindo. Ou ainda: uma no linearidade
na respost a de um sistema pois a respost a (sada) no depende unicament e
das entradas, mas tambm do passado recente da entrada e da sada.
Um comparador Schmitt trigger tambm chamado de comparador de
janela. Este ltimo nome provm da forma de onda da relao entre a
entrada e a sada, conforme most rado abaixo.
+Vs Vsai
Figura 5 Janela
- BVs +BVs Vent
- Vs
5
O grfico most ra uma janela que existe entre o caminho de ida e o de
volta. Olhando para a figura vemos que, enquant o Vent for negativo a sada
positiva (+Vs). Aumentando Vent at ficar positiva, a sada permanece
positiva, at que Vent atinja +BVs. Neste pont o a sada comut a de positiva
para negativa (- Vs). No sentido inverso, enquant o Vent for positiva, a sada
ser negativa. Seguindo baixando Vent at ficar negativa, a sada
permanece negativa at que Vent atinja - BVs. Neste pont o a sada retorna
positiva. Quando a tenso de entrada estiver entre +BVs e - BVs a sada
pode estar positiva ou negativa, dependendo de estar Vent aument ando ou
diminuindo. Isto a histerese, ou seja o caminho de ida diferent e do de
volta.
Na ilustrao abaixo temos o circuit o tpico de um comparador de janela.
Figura 6 - Circuito de comparador janela
Vemos que neste circuito o sinal Vent aplicado na entrada negativa.
Assim quando Vent for negativo, a sada ser positiva. A realiment ao
neste circuito positiva, pois o sinal de sada somado ao sinal da entrada
positiva e no subtrado. Com realiment ao positiva, a sada sendo
positiva leva a entrada + para cima, o que leva a sada a ficar mais positiva
ainda, at saturar o comparador. Se Vent chegar a ficar positiva e atingir
+BVs a sada comea a virar para negativa e com isto a entrada + fica
negativa, levando a sada a ficar mais negativa, at saturar negativament e o
comparador. Estamos falando do pont o de transio BVs, mas o que o B ?
o fator de realimentao dado pela relao entre R1 e R2.
B =
R2
R1+R2
Ajustando os valores de R1 e R2 podemos variar a largura da nossa janela,
para que a mesma seja maior que o rudo pico a pico do sinal de entrada
Vent. Note- se que temos a variao da janela simtrica em relao ao zero
volts na entrada. Podemos alterar isto ligando R2 a uma tenso de
referncia em vez do terra. Vide exemplo abaixo:
Exemplo de Schmitt trigger:
6
Figura 7 - Schmitt trigger
Neste circuit o, com estes valores, podemos calcular a histerese e os pontos
de comut ao.
Quando Vent for negativo, a sada ser Vs = +5V. Isto leva a entrada + a
estar com a tenso =
Vref + Vs = x 1 + x 5 = 1,04V
Quando Vent for positivo, atingindo 1,04V a sada vira para negativo (- 5V)
e a tenso na entrada positiva fica:
Vref - Vs =x 1 - x 5 = 0,94V
Note que se Vref = 0, ou seja R2 aterrado, temos o mesmo circuito inicial
do comparador de janela e a parcela Vref x R1/(R1+R2) fica nula. Assim a
tenso na entrada + apenas
BVs = Vs
No nosso exemplo o intervalo entre as comut aes para negativo e para
positivo de
1,04 - 0,94 = 0,1V. Assim o comparador imune a interferncias e rudos
de at 0,1V. Esta histerese do nosso comparador. Reiteramos que basta
alterar a relao entre R1 e R2 para mudar a histerese. Os pont os onde o
circuit o muda de estado so os chamados pont o de disparo (trigger)
superior (1,04V no exemplo) e inferior (0,94V no exemplo).
O Schmitt trigger muito usado quando temos um sinal na entrada que
varia lentament e e queremos obter uma sada que mude abrupt ament e,
como por exemplo para obter uma onda quadrada a partir de uma senide.
Assim que o sinal na entrada ultrapasse um dos pontos de disparo h uma
mudana abrupt a causada pela realiment ao positiva.
EXERCCIOS:
1) Desenhe o esquema de um comparador que mude a sada quando a
entrada for superior a 2V.
2) No circuito da figura 7 altere os valores de R1 para 5K e R2 para 220 .
Mantenha o rest o inalterado e calcule a nova histerese.
3) Num sistema temos um sinal de at 1V com rudo de 20mV. Sempre que
este sinal ultrapassar 1V devemos sinalizar o controle com um alarme
sonoro. Para evitar que o rudo perturbe o sinal de cont role, queremos
7
usar um Schmitt trigger que elimine este rudo. Projete o circuito
adequado. A alimentao do sistema de + 15V.
4) Qual o pont o de comut ao do circuito abaixo?
Fig 8
COMPARADORES COM HISTERESE AJUSTVEL
Podemos usar um Opamp para mont ar um comparador com um pont o de
disparo (trigger) fixo e histerese ajustvel. Para facilitar a interface com
sinais digitais, podemos usar um zener na sada do operacional confor me
mostra o esquema abaixo, ou ento tirar o sinal de sada direto do Opamp.
fig 9 - Comparador com histerese
Neste circuit o comparador o diodo no lao de realiment ao bloqueia uma
das polaridades da realiment ao. Assim a histerese se desenvolve apenas
para um dos dois estados da sada do comparador. Esta realiment ao
positiva via R2 se soma ao sinal de referncia Eref. Ento na entrada + do
operacional temos Eref quando a realiment ao fica bloqueada e temos
Eref + V quando a realiment ao positiva acontece. V definida por:
V = , quando VZ > Eref
Variando R2 iremos variar a parcela da sada somada Eref e assim
alteramos a histerese. O outro pont o de mudana de estado fica fixo em
Eref pois o diodo bloqueia.
8
Es
Ee Eref
V
VV
Como j dissemos acima a sada pode ser tirada tanto do zener como
direto no operacional. R3 serve para limitar a corrent e no zener e R4 para
descarregar a capacitncia do diodo. Tirando a sada do zener temos os
valores fixos VZ e zero, enquant o que tirando do operacional a sada vai a
prximo de Vcc e - Vdd.
Outro circuito de comparador de janela most rado abaixo:
Fig 10 - Comparador de janela
PRTICA I
COMPARADORES
OBJETIVO:
Esta prtica visa observar o funcionament o dos comparadores tipo LM339,
com e sem histerese.
EQUIPAMENTO:
02 Fontes de aliment ao;
Multmetro;
Osciloscpio;
MATERIAL:
CI LM339;
Resistores de 8K2, 2K2 e 1K;
PROCEDIMENTO:
1) Monte o circuito abaixo para verificar o funcionament o do comparador
sem histerese;
9
2,3
4,7
Ee
nt
Esai
2) Ajuste a tenso da fonte 1 para 10V e a fonte 2 para 1,5V. Conecte a
fonte 1 ao circuito, deixando- a desligada e ligue o osciloscpio em Vsai,
ajustando para medir CC, 2V/div.
3) Conecte a fonte 2 desligada em Vent e ligue as fontes 1 primeiro e 2
depois. Observe no osciloscpio a tenso Vsai e anote seu valor.
4) V subindo lentament e o valor da fonte 2 e observe no osciloscpio Vsai.
Quando Vsai mudar de estado, mea o valor de Vent e anote.
5) Baixe lentament e o valor da fonte 2 e observe no osciloscpi o Vsai.
Quando Vsai mudar de estado, mea o valor de Vent e anote.
6) Inverta as entradas do LM339, passando Vent para o pino 4 e a juno
dos resistores para o pino 5. Conecte um resist or de 12K entre a sada
do LM339 e o pino 5. Varie a tenso Vent at que a sada mude de estado
de alto para baixo e vice- versa, fazendo o grfico da respost a do
circuito.
TIRISTORES
TIRISTOR o nome dado aos dispositivos bi- estveis que possuam 3 ou
mais junes, onde pelo menos uma pode mudar de estado (conduz- no
conduz) quando alteramos as caractersticas de tenso ou corrente sobre o
mesmo.
Tiristor o termo genrico que inclui todos os tipos de chaves tipo pnpn
tais como:
SCR - retificador controlado de silcio;
TRIAC - tiristor triodo bidirecional;
LASCR - SCR ativado por luz;
FET- CTH - tiristores controlados por FETs;
MCT - tiristores controlados por MOS;
GTOS, RCTs ,SITHs, etc
10
Os tiristores possuem trs terminais: anodo(A), catodo (K) e gatilho (gate)
(G).
O smbolo e a estrut ura interna das junes mostrada abaixo:
A
G K
fig 11 Tiristor - smbolo e estrut ura interna
Este smbolo do tiristor genrico, podendo represent ar tambm o tipo
mais comum de tiristor que o SCR. Vamos explicar inicialment e como
funciona o SCR e mais adiante o TRIAC. Os outros tipos de tiristores tem
simbologia diferente e funcionament o tambm diferenciado, sem fugir da
definio dada acima. Nosso curso de Telemtica no pode se dedicar
muit o aos outros tipos de tiristores pelo extenso contedo que temos que
cobrir. Caso necessi tem conhecer algo mais sugerimos o livro Eletrnica de
Potncia de Muhammad Rashid ou outros similares. Tiristores so
indispensveis nos circuitos de controle de potncia indust rial. H uma
extensa literat ura a respeito e seu estudo requer uma base matemtica
avanada, bem como a teoria de sistemas de controle. Os inversores e
conversores estticos para controle de mqui nas e motores so exempl os
de aplicaes de tiristores.
Em muitos pases os termos Tiristor e SCR so usados
intercambi avel ment e. Contudo eles no so 100% equivalentes. Tiristor
um termo mais genrico que SCR, sendo originado do grego e significando
porta. Tiristores so sempre como chaves que deixam ou no passar
correntes, dependendo de um circuito de controle.
SCRs
O SCR (silicon controlled rectifier ou retificador controlado de silcio) o
tirist or mais comum no mercado. Seu smbolo o most rado na figura 11
acima. Como podemos ver eles possuem terminais com nomes conhecidos:
anodo, catodo e gate. Os termos anodo e catodo nos lembram dos
primeiros semicondut ores que estudamos: os diodos. O prprio smbolo
do SCR lembra um diodo, diferindo apenas pela presena do gate. Da
mesma forma o nome retificador controlado lembra o do diodo retificador.
Isto no por acaso. O SCR foi inventado justament e como um avano do
diodo, permitindo um controle sobre a funo de retificao.
Lembram que os diodos conduzem apenas quando polari zados
diretament e, ou seja tenso no anodo maior que a do catodo. Quando a
tenso no anodo for menor que a do catodo dizemos que ele est em
11
P
N
P
N
J1
J2
J3
bloqueio. O SCR tambm fica em bloqueio quando a tenso no anodo for
menor que a do catodo . Nesta condio de bloqueio a corrent e pelo SCR
nula, teoricament e e da ordem de alguns mA na prtica.
Quando aplicamos uma polarizao direta no SCR, diferent ement e do
diodo, ele ainda no entra em conduo . Para que ele conduza necessrio
algo mais. Normalment e usamos um pulso no gate (gatilho) para disparar o
SCR. Alm do pulso veremos outras maneiras de dispar- lo.
O funcionament o do SCR ideal pode ser most rado pela figura 12 abaixo:
I
V
AK
Figura 12 : o SCR ideal
Vemos pela ilustrao aquilo que explicamos acima, ou seja com tenso
V
AK
negativa (polarizao reversa) a corrent e pelo SCR zero. Se V
AK
for
positiva (polarizao diret a) a corrente pode ser zero se no disparamos o
SCR (bloqueio em polarizao direta) ou pode aument ar muito, com a
tenso V
AK
caindo a zero. Claro que esta uma condio s ocorre num
SCR ideal.
O SCR depois de disparado permanece em conduo mesmo que retiremos
o pulso de disparo. O pulso de disparo destrava o SCR e ele fica
conduzi ndo at que a tenso V
AK
caia para zero ou fique negativa ou ento
at que a corrente por ele caia abaixo de um nvel mnimo chamado de I
H
-
corrente de manut eno (I Holding).
Podemos tambm explicar o funcionament o do SCR como uma trava feita
com um par de transist ores complement ares confor me most ramos abaixo:
Figura 12 SCR como dois transist ores
12
P
N
P
N
Sem disparo
P
Com pulso de dis par o
N
K
A
G
Numa condio inicial os transist ores esto cortados. Se aplicamos uma
tenso negativa entre anodo e catodo os transistores seguiro cortados,
pois temos duas junes (J1 e J3) com polarizao reversa. Ao aplicarmos
uma tenso positiva entre A e K as junes J1 e J3 ficam polarizadas
diretament e, porm J2 ainda est polarizada reversament e. Assim os
transist ores seguem cortados, pois no h corrente de base em nenhum
deles.
Para que haja conduo entre A e K preciso uma corrent e de base,
aplicada em G. Esta corrente, mesmo que seja um pulso estreito, faz com
que o transist or NPN comece a conduzi r. Ao conduzi r o NPN sua corrent e
de coletor aument a subst ancial ment e (Ib) o que faz circular uma corrente
de base no PNP. Esta corrent e de base aciona o PNP, cuja corrent e de
coletor circula e aciona mais ainda a corrente de base do NPN.
Aument ando a corrent e de base do NPN aument a sua corrent e de coletor, o
que aument a a conduo do PNP e assim por diante numa realiment ao
positiva que leva ambos transist ores satur ao. Assim o pulso de disparo
s necessrio para iniciar o processo. A prpria realiment ao positiva se
encarrega de mant er o processo.
Uma pequena corrente de base suficiente para disparar o SCR, como
mostra a analogia com os dois transist ores. Esta corrente chamada de
corrente de disparo . A partir da aplicao do pulso de disparo
rapidament e os transist ores atingem a saturao e o circuito fica travado
em conduo. Por isto se chama de trava com transist ores. Este travament o
se d tanto em bloqueio como em conduo. Para faz- lo mudar de estado
precisamos algo externo agindo sobre o SCR abrindo ou fechando a
trava.
Na condio de conduo (on- stat e) , tecnicament e chamada de
polarizao direta em conduo, a queda de tenso ideal entre A e K
zero, ou seja toda tenso aplicada repassada carga. Num SCR real h
uma queda em torno de 1,0 a 1,8V entre A e K.
Na condio de bloqueio (off- state) a corrent e que circula, em teoria
zero, e na prtica fica entre 0,1 a 0,3 mA para os SCR de baixa potncia e
entre 10 e 500mA para os de alta potncia. Note- se que temos SCRs
capazes de chavear cargas de mais de 1000A.
Outra forma de ligar o SCR, ou seja fechar a trava, aument ando a
tenso V
AK
at atingir V
BO
, ou tenso de rupt ura (breakover). Assim
conseguimos injetar port adores na juno J2 que est polarizada
reversament e, e criamos o fenmeno de avalanche. Porm este tipo de
disparo pode ser destrutivo e deve ser evitado. Os fabricant es informam
V
BO
e devemos sempre evitar aplicar tenses muito prximas a ela.
Outro fato a considerar a respeito do disparo do SCR que o pulso de
disparo deve ser estreito, com energia suficiente apenas para iniciar o
processo de realiment ao positiva. Manter o pulso aps isto desperdcio
de energia e aument a as perdas na juno de gatilho.
13
Tambm no se deve aplicar sinal de gatilho quando o SCR estiver
polarizado reversament e pois isto pode aument ar muito a corrent e de fuga
e danific- lo.
Devemos aplicar um pulso de disparo que garant a a entrada em conduo
do SCR. Isto implica em uma tenso mnima e numa corrent e mnima de
disparo. Valores tpicos so da ordem de 0,8V e 10mA para SCRs de baixa
potncia. Ao aplicarmos este pulso de disparo o SCR entra em conduo
passando por uma regio de resistncia negativa, onde aument a a corrente
pelo SCR, mas a queda de tenso entre anodo e catodo diminui. Quant o
maior for a corrent e de porta (ou de gatilho) menor ser a tenso
necessria entre A e K, pois a tenso direta de bloqueio diminui . A figura
abaixo ilustra esta caracterstica.
Figura 12 - Curva real de um SCR
Podemos observar nesta figura que a corrent e I
GT
a corrent e mnima para
disparo do SCR na tenso V
T
. Tambm podemos ver os parmet ros I
L
e I
H
.
I
L
a corrente mnima que deve circular pelo SCR para garantir que ele
fique travado em conduo (I
L
= latching current), isto uma vez que o
SCR comear a conduzi r seja por avalanche ou por disparo de gatilho, se a
corrente por ele no atingir I
L
ele volta a ficar cortado. Uma corrent e acima
de I
L
garante os port adores suficientes para mant er o travament o.
J I
H
a corrente de manut eno, ou seja aps o SCR ter sido disparado e
entrado efetivament e em conduo, temos que garantir que a corrent e por
ele no caia abaixo de I
H
caso contrrio ele entra em corte outra vez. I
H
vem
de holding current. Se a corrent e pelo SCR cair abaixo de I
H
faltam
portadores na juno J2 o que recria a condio de depleo e o SCR trava
em bloqueio. Notem que sempre I
H
menor que I
L
.
Resumindo as caractersticas do SCR:
Para entrar em conduo:
Tenso A- K positiva e pulso de disparo. Corrente acima de I
L
.
Para cortar:
Tenso A- K negativa ou corrente abaixo de I
H
.
14
OUTRAS FORMAS DE DISPARO DE SCRs:
Alm do disparo por pulso ou por sobretenso o SCR pode ser disparado
por :
a) Variao brusca da tenso V
AK
;
b) Aument o de temperat ur a;
c) Luz atingindo a juno (LASCRs);
a) Se V
AK
aument ar muito bruscament e (dv/dt alto) haver uma carga nos
capacitores das junes, especialment e J2 , capaz de fazer um dos
transi st ores (do model o com dois transistores) , comear a conduzi r. Se
isto ocorre, a realiment ao positiva se encarrega de fazer o outro
transi st or entrar em conduo tambm e o SCR fica dispar ado, mesmo
sem pulso no gatilho. Os valores de dv/ dt para os SCR so da ordem de
50 a 300V/ s. Temos que evitar esta taxa elevada de cresciment o da
tenso V
AK
, para isto usamos um circuito amort ecedor do cresciment o
abrupt o da tenso, chamado de snubber RC. Como o nome indica ele
feito com um resistor e um capacitor, como most ra a figura abaixo:
O circuito RC em paralelo com o SCR faz com que a tenso V
AK
no consiga
aument ar muito rapidament e, pois preciso primeiro carregar o capacitor,
que inicialment e um curto, para que depois V
AK
cresa. A determinao
de R e C dada por:
dv
dt
= 0,632
Vf
RC
, onde
dv
dt
dado pelo fabricant e do
SCR, Vf a tenso da fonte que aliment a o SCR e RC a const ant e RC ,
com R em Ohms e C em Farads.
b) Um aument o brusco da temperat ur a do SCR tambm pode coloc- lo em
operao, sem o pulso de disparo. Isto ocorre pelo aument o dos
port adores nas junes, o que aument a a corrente de fuga. Este
aument o da corrent e, pela realiment ao positiva pode causar o disparo.
Temos que evit- lo.
c) Se pudermos aplicar luz ou outra forma de energia radiant e sobre as
junes do SCR causaremos um aument o dos port ador es eltron- lacuna,
o que como no caso acima, aument a a corrente de fuga e pode disparar
o SCR. Existem SCR especialmente constr u dos para aproveitar este
fenmeno, chamados de foto- SCR ou LASCR (SCR ativado pela luz).
15
Circuit o
s nubber
RC
Estes SCRs possuem tambm o gatilho, por onde podemos ajust ar a
sensibilidade com relao a luz incidente.
Outro fator a considerar no SCR o cresciment o muito rpido da corrent e,
especial ment e nos SCRs de maior potncia. Estes SCRs so maiores e para
que a corrente A- K se espalhe unifor mement e por todas as junes
necessrio um certo tempo. Se a corrent e de anodo cresce mais
rapidament e que o espal hament o de cargas pelas junes, isto pode
danificar o SCR. Para evitar este fenmeno praxe usar um indut or em
srie com o SCR. Este indut or limita a taxa de elevao da corrent e e ainda
auxilia o snubber pois no deixa a tenso crescer demasiadament e rpido.
FORMAS DE COMUTAR UM SCR
Para levar o SCR ao corte j vimos que necessrio cortar ou inverter a
tenso A- K ou diminuir a corrente abaixo de I
H
. A comut ao feita pela
reduo da corrente abaixo de I
H
chamada de comut ao natural ,
enquant o que se tivermos que zerar ou inverter a tenso A- K, chamamos a
comut ao de forada .
A comut ao nat ural se d nos circuitos em CA, pois nestes circuitos a
corrente sempre cai abaixo de I
H
em cada semiciclo positivo. Em CA no
precisamos nos preocupar em fazer o SCR parar de conduzir, e sim temos
que nos preocupar em faz- lo conduzir, garantindo um pulso de disparo
em cada semiciclo.
Em CC a situao se inverte. Uma vez disparado o SCR ele no para mais
de conduzi r a menos que cortemos a aliment ao ou de algum modo
invertamos a polaridade da tenso A- K. Uma maneira de fazer isto
conectar um capacit or e uma chave em paralelo com o SCR e criar assim
uma tenso reversa, como most ra a figura abaixo:
Um dos circuitos mais comuns de SCR em CC a prot eo crowbar, onde
disparamos um SCR sempre que a tenso na sada exceder um certo limite.
Este disparo corta a tenso na sada. Para restabelecer a tenso
necessrio desligar a alimentao forando a comut ao do SCR. Este tipo
de proteo usada em alguns tipos de fontes, normal ment e associados a
limitadores de corrent e. Um circuit o tpico de crowbar most rado abaixo:
16
+
-
V s a i
C a r g a
R 1
Z E N E R
S C R
Como o SCR mais usado em CA, como retificador de meia onda, pois
conduz num s sentido, veremos alguns circuitos. Inicialment e no circuito
abaixo o SCR estar cortado. Ao fechar mos a chave circular uma corrent e
pelos resistores e pelo diodo. Podemos considerar que a juno de gatilho
para catodo (G- K) como um diodo que fica em paralelo com o resistor
R1. Assim quando a tenso sobre R1 atinge em torno de 0,7V como se R1
ficasse em curt o e a tenso da rede ficasse aplicada sobre D1 e R2. Como
D1 em conduo apresent a resistncia quase nula, para efeitos de clculo
podemos considerar a tenso da rede aplicada diretament e sobre R2.
Sabendo a corrent e de gatilho que dispara nosso SCR podemos calcular em
que tenso da rede ocorre o disparo e quant o do semiciclo efetivament e
aplicado ao SCR.
60. 0Hz
220V
TIC226B
D1
R1
R2
Partindo da corrent e de disparo do TIC106C que de 30 mA a uma tenso
de 7,0V e admitindo R2 = 330 temos:
IG = 30 x 10
- 3
=
V
R2
V = 330 x 30 x 10
- 3
= 9,9 V
Assim temos o valor exato da tenso V que dispara o SCR. Quando a
tenso CA atingir 9,9 V segurament e o nosso SCR ir disparar. Como
nossa tenso CA de 220V ele ir atingir 9,9 logo a 2 graus (220.2x sen
= 9,9V), ficando conduzi ndo por quase todo o semiciclo positivo (88
graus).
17
Se trocamos R2 por 2K a tenso de disparo ser de 2K x 30 x 10
- 3
= 60 V
e o nosso SCR conduzir por apenas 78,8 graus, ficando cortado por 11,2
graus.
Usando SCRs possvel apenas transferir a metade da potncia carga
em CA pois o SCR conduz apenas num semiciclo, ficando em bloqueio no
outro, quando a tenso se inverte. Podemos usar dois SCRs em ante -
paralelo para conseguir transferir toda a potncia carga. Porm mais
comum usarmos um TRIAC, o qual veremos mais adiante.
PRTICA DE SCR
OBJETIVO: Aplicar a teoria est udada em aula sobre SCRs.
EQUIPAMENTO:
Osciloscpio
Fonte CC
MATERIAL:
SCR;
Resistores 470 D, 1K8, 33k D e 10KD
Diodo 1N4007
Lmpada 12V/5W
Lmpada 60W, 220V
PROCEDIMENTO:
1) Monte o circuito da esquerda abaixo deixando as chaves abertas. Ligue
a fonte ajust ada para 12V;
2) Feche a chave 1 e verifique se a lmpada acende;
3) Feche a chave 2 e verifique se a lmpada acende;
4) Abra a chave 2 e verifique se a lmpada continua acesa;
5) Abra a chave 1 e verifique se a lmpada continua acesa. Desligue a fonte;
6) Monte o circuito da direita para o resto da experincia
ATENO : CUIDADO AO TRABALHAR COM A TENSO DA REDE
7) Alimente o circuito pela rede 220V, 60Hz e verifique se a lmpada
acende;
8) Feche a chave e verifique se a lmpada acende;
9) Conecte o osciloscpio ajustado para AC, 20 V/div sobre a lmpada e
observe a forma de onda.
18
R1
1k8
CH1
+
-
18V
12V/5W
CH2
TIC106B
R2
470
60. 0Hz
220V
TIC106B
1N4007
10K
33K
TRIACS
O TRIAC uma evoluo natural do SCR pois, como j dissemos
anterior ment e, o SCR s conduz em metade do tempo para correntes
alternadas (CA). Assim para transferir potncia total carga foi inventado
o tiristor triodo bidirecional, nome oficial do TRIAC. Seu funcionament o
pode ser entendido como se juntssemos dois SCR em oposio, de formas
que um conduz no semiciclo positivo e o outro no negativo da tenso CA.
O prprio smbolo do TRIAC indica esta semelhana com o SCR:
MT2
G
MT1
Os terminais do TRIAC so chamados de terminal principal (MT1 e MT2) e
gatilho (G).
Os terminais MT1 e MT2 so intercambiveis. A curva caracterstica do
TRIAC igual do SCR, sendo porm dupl a, uma para cada lado da tenso
entre MT1 e MT2.
Seu funcionament o tambm muito assemel hado ao SCR. O TRIAC
tambm fica em bloqueio direto at atingir VBO (tenso de rupt ur a) ou
ento at receber um pulso de disparo no gatilho. A grande diferena com
o SCR que o TRIAC pode receber pulsos de gatilho tanto positivos quant o
negativos. Dependendo da tenso entre MT1 e MT2 e do pulso ser positivo
ou negativo, temos definido os chamados quadrant es de operao do
TRIAC, most rados abaixo:
19
Tenso MT2- MT1 Pulso Gatilho Quadrant e
>0 >0 I (ou I+)
>0 <0 II (ou I- )
<0 <0 III (ou III- )
<0 >0 IV (ou III+)
Observe- se que nos quadrant es I e III a polaridade a mesma entre a
tenso MT1- MT2 e o pulso de gatilho. Nestes quadrant es o TRIAC mais
sensvel e opera melhor. Nos quadrant es II e IV necessrio aplicar um
pulso de gatilho com mais energia (maior corrente) para faz- lo conduzi r.
Note- se que pulso negativo no gatilho significa a corrente saindo do
gatilho.
O TRIAC pode ser usado tant o em circuitos CC como o SCR, mas sua
grande aplicao mesmo em CA, para controle da potncia aplicada
carga, tambm chamado de cont role de fase. Neste tipo de circuito temos
uma modali dade de disparo que permite ajust ar quant o da tenso da rede
efetivament e aplicado na carga. Se deixarmos passar toda a tenso de
aliment ao a carga ter potncia mxima. Se aplicamos o pulso de gatilho
no meio do semiciclo cortar mos met ade da tenso e consequent ement e
metade da potncia.
Veremos com um exemplo como se d este controle de potncia na carga.
Partimos de uma carga resistiva, por exemplo de 200 , alimentada por
220V, 60Hz. Vamos controlar a tenso sobre a carga desde 220Volts(TRIAC
conduzi ndo sempre) at 155Volts (TRIAC conduzi ndo soment e metade do
semiciclo). Para tal usamos o circuito abaixo:
Considerando- se os dados do TIC236D de corrente mxi ma no gatilho IGM
= 75mA a uma tenso tambm mxima de VG = 2,5V, temos a seguinte
frmula para clculo do circuit o de disparo:
RT = R1 + R2 = Vp sen a - VG
IGM
20
Sempre considerando que a juno G- MT1 como um diodo, para efeitos
de clculo, como no SCR. Nesta frmul a VP a tenso de pico da rede, no
caso 220 2. Sen a o quant o da tenso deixaremos passar. Se o ngulo a
for zero, o valor de sen a = 0 e assim no adianta disparar o TRIAC na
passagem por zero, pois neste caso a tenso MT1- MT2 tambm ser zero.
Podemos comear disparando logo aps a passagem da senide por zero,
talvez l pelos 2 graus (sen 2 = 0,0349). Com este circuito podemos
disparar at 90 graus (sen 90 = 1). Aps 90 graus os valores do seno
comeam a se repetir e o assim no podemos disparar o TRIAC a mais de
90 graus, pois na subida da onda a senide j passa pelo valor e dispara o
TRIAC. Isto ficar mais claro com o clculo do circuito acima.
Calculando ento os valores de RT para garantir o dispar o do TRIAC entre
2 e 90 graus, temos:
para a = 2, sen a = 0,0349 e RT = 111,4
para a = 90, sen a = 1 e RT = 4115
Desta forma temos que R1 deve ser de 100 , em srie com um
potencimet r o de 4K7 para podermos varrer toda a faixa de 111 a 4115 .
Este circuito de disparo do TRIAC permite aplicar uma tenso eficaz entre
220 e 155V na carga, calculada por:
Vef = 220 2 x - a/2 n + (sen 2a)/4 n a em radianos e
P = Vef
2
/ R
As formas de onda na carga ficam como most ra a figura abaixo:
Variando o valor da resistncia R2 alteramos o pont o de dispar o do TRIAC
entre 2 graus e 90 graus, pois com isto alteramos o moment o em que
temos no gatilho energia (tenso e corrent e) suficientes para fazer o
TRIAC entrar em conduo. Na passagem da tenso por zero o TRIAC corta
outra vez e ao chegar ao mesmo ngulo no semiciclo negativo h outro
disparo e assim sucessivament e.
21
Se quiser mos disparar o TRIAC ou o SCR a mais de 90 graus precisamos
conhecer outros dispositivos de disparo, como os DIACs e transistor
unijuno, que veremos a seguir.
EXERCCIOS:
1) Calcule os resistores para acionar uma carga de 500W em 220V usando
o TRIAC TIC226D nos ngulos de dispar o 5, 45 e 90 num circuito
idntico ao acima. Use VG = 2,0V e IGM = 10mA.
2) Calcule a potncia na carga para os trs ngulos acima. No esquea de
transfor mar os graus em radianos ( 180 = radianos).
3) Num circuito similar ao acima queremos controlar uma resistncia de
um aquecedor com 60W/220V para que a mesma consuma entre 50% e
75% (a = 66) da sua potncia nominal. Calcule a tenso eficaz para tal e
os resistores do circuito de disparo. Use um TRIAC com VG = 1,8V, IGM
= 20mA.
4) Experiment e disparar o TRIAC num ngulo de 120 e veja o que
acontece.
Pelos exerccios acima vemos que no possvel disparar o TRIAC em
ngulos acima de 90 graus. Para isto precisamos conhecer outros
dispositivos de disparos: o DIAC e o SUS.
DIAC, SUS e SBS
O DIAC um diodo de trs camadas, com caractersticas de avalanche
bidirecionais, que passa a conduzir quando a tenso sobre ele excede um
determi nado valor, tipicament e de 20 a 40V. Suas caractersticas so como
uma chave dispar ada por um certo nvel de tenso, VD, que pode ser
positiva ou negativa.
A curva que explica o funcionament o do DIAC igual do TRIAC, exceto
que o DIAC no tem gatilho, sendo apenas disparado quando a tenso
sobre ele exceder a de dispar o. O smbolo do DIAC tem trs verses, mas a
mais comum e oficial a da esquer da:
22
Um circuito tpico com DIAC e TRIAC mostrado abaixo. Ele usa um
artifcio com constant e de tempo RC para consegui r levar o ngulo de
disparo a mais de 90 .
R E D E
C a r g a
R2
C1
R1
DIAC
TRIAC
Neste circuito a tenso da rede carrega o capacitor C1 atravs de R1 e R2.
Quando o valor desta tenso atingir VD ( a tenso de disparo do DIAC) o
DIAC entra em conduo e passa a acionar o TRIAC. Com a conduo do
DIAC forma- se um caminho via gatilho do TRIAC para descarga de C1. No
semiciclo seguinte a operao se repete.
Dizemos que h um artifcio RC para conseguir disparar o TRIAC a mais de
90 , pois o capacitor leva um certo tempo para se carregar at VD. A tenso
sobre o TRIAC sobe acompanhando a tenso da rede, instant aneament e,
enquant o sobre o capacitor h um atraso de tempo = (R1+R2) C1. Como
R2 varivel, podemos mudar o ngulo de disparo por ele. Aumentando
esta constant e RC podemos fazer com que a tenso sobre C1 soment e
atinja VD quando a tenso sobre o TRIAC j esteja a bem mais de 90,
podendo ir at quase 180 . Claro que no adiant a ir at 180 , pois a a
tenso j zero.
Este circuito com DIAC e TRIAC funciona bem para ngulos de disparo
grandes, mas em pequenos ngulos de disparo, mesmo reduzi ndo R2, o
capacit or tem dificuldade de se carregar pelo pouco tempo que leva a
tenso da rede at atingir o ngulo desejado. Para evitar este efeito usamos
mais um capacitor no circuito, mostrado abaixo:
R E D E
C a r g a
R3
C2 .01uF
R2
C1 .1uF
R1
DIAC
TRIAC
Nesta verso do circuito carregamos C2 at ele atingir VD. Neste ponto o
TRIAC dispara e C2 se descarrega via gatilho. Porm C1 como maior que
C2 e est antes de R3, estando mais carregado que C2, acaba fornecendo
23
parte da carga para C2. Assim a cada semiciclo C2 sempre ter uma certa
tenso inicial, favorecendo o ngulo pequeno de disparo.
O SUS ou chave unilateral de silcio uma verso do DIAC para SCRs. Ele
se comport a como um diodo em bloqueio, at que se atinja sua tenso de
disparo, tipicament e de 8V. Neste pont o ele entra em conduo e passa a
ter uma queda tpica de 1,5V. Internament e ele se parece com uma trava
com dois transistores, acrescida de um zener entre a base do PNP e o
emissor do NPN. Este Zener interno que define o ponto de disparo da
chave. O smbolo do Sus :
A
G
K
Podemos usar um zener externo ao SUS fazendo baixar a tenso de
disparo. Este zener deve ficar entre G e K, em paralelo ao zener interno.
Logicament e o zener externo tem que ter Vz externo < Vz interno.
O SBS (chave bilateral de silcio) uma verso do SUS para TRIACs, pois
bidirecional. Ela difere do DIAC por ter o terminal de gatilho disponvel, o
que torna mais flexvel o controle. O smbolo do SBS :
A
G
K
PRTICA TRIAC
OBJETIVO: Familiarizar - se com o TRIAC e seus controles. Aprender a
cont rolar a potncia numa carga.
EQUIPAMENTO:
Osciloscpio
Fonte CC
MATERIAL:
TRIAC TIC226D;
Resistores 100 , 10K
Potencimet r o de 100K
24
Capacitor 0,01 F/400V
Lmpada 60W, 220V
PROCEDIMENTO:
1) Monte o circuito abaixo. Ajuste o potencimet ro para zero ohms;
2) Conecte o osciloscpio sobre a carga, em AC 20 V/div e ligue o circuito
na rede e observe a forma de onda;
ATENO : CUIDADO AO TRABALHAR COM A TENSO DA REDE
3) Varie o potencimet ro at seu valor mximo e v observando a forma de
onda;
4) Volte o potencimet r o at zero ohms, observando a tenso na carga e
sobre o capacitor C1.
R E D E
C a r g a
1N4007
1N4007
100K
C1 .1uF/400V
68K
TRIAC
TRANSISTOR UNIJUNO
O transistor de unijuno, UJT ou simplesment e unijuno um
semicondut or criado em 1953 com finalidade de simplificar os circuitos de
cont role que usam pulsos ou osciladores. Como o nome indica, ele possui
apenas uma juno PN, sendo constru do com uma barra de silcio
fracament e dopada, de material N, cujas duas extremi dades so chamadas
25
de base 1 (B1) e base 2 (B2). No meio desta barra inserida uma zona P
fortement e dopada, onde ligado o emissor. Abaixo ilustramos a estrut ura
interna do UJT, seu smbolo esquemtico e o circuito equivalente.
UJT
B 2
B 1
E
Rb1
Rb2
Como entre B1 e B2 temos apenas uma barra de semicondut or, podemos
dizer que temos ali uma resistncia hmica, que varia na prtica entre 4K e
10K. Isto vale para quando o emissor estiver abert o. Esta resistncia
chamada de RBB ou resistncia interbase.
Ao aplicarmos uma tenso V entre B1 e B2 teremos um divisor de tenso
com RB1 e RB2 calculado por:
V
RB1
= V1 = V
ou seja V1 = V , de onde
Esta relao entre R1 e RBB chamada de razo intrnseca de afastament o
do UJT, sendo informada pelo fabricante. Seu valor oscila entre 0,5 a 0,8.
No UJT mais popular no mercado, o 2N2646, temos = 0,65.
Assim num circuito aliment ado por 12V, usando um 2N2646, o valor de V1
= 7,8V. Isto significa que temos sobre R1 uma tenso de 7,8V. Chamamos
de razo intrnseca de afastament o pois se quisermos polarizar nosso
2N2646, aliment ado por 12V, precisamos aplicar no emissor uma tenso
superior a 7,8V (V = 0,65x12) a fim de que o diodo emissor possa
conduzir. Temos que vencer esta razo de afast ament o para por o UJT em
funcionament o. Mas como ele funciona? Veremos a seguir.
O UJT possui trs regies de funcionament o tpico, chamadas de corte, de
saturao, como nos demais transistores e a regio de resistncia negativa,
que o diferencia. A figura abaixo ilustra a curva caracterstica do UJT.
26
B2
E
B
1
B
1
B
E
Partindo do que vimos acima, isto do emissor aberto, quando temos
entre B1 e B2 um resistor RBB, vamos aument ando a tenso no emissor at
que esta fique maior que V1 = V. Neste ponto(di to VP) o diodo emissor
passa a conduzir e isto faz com que os portadores de carga P saiam do
emissor fortement e dopado e entrem na regio N entre E e B1. Isto cria um
caminho de baixa resistncia entre o emissor e a base 1. Podemos dizer
que R1 diminui muit o seu valor. Com isto a tenso no emissor cai bastant e
em relao a B1 e a corrente de emissor aument a. Mas esperem a, tenso
cai e corrent e aument a? Isto no cont raria a lei de Ohm? No contraria se
tivermos uma resist ncia negativa . E isto que ocorre. Como a resistncia
entre emissor e B1 cai bastant e, ela se comport a como uma resistncia
negativa mesmo! Num UJT ideal podemos considerar at que, quando
ultrapassamos a tenso de afast ament o, VP, temos um curt o entre E e B1.
Num UJT real temos uma pequena tenso de saturao (VE
sat
) entre E e B1.
Uma vez disparado o UJT por uma tenso superior a tenso de
afastament o VP ele se trava em conduo e assi m permanece at que
diminuirmos a tenso VE abaixo de um valor chamado de VV ou tenso de
vale, que a tenso na qual a corrent e pelo diodo emissor tal que no
injeta mais portador es suficientes na barra N. Na realidade VV corresponde
a uma corrent e de vale I
V
, dada pelo fabricant e. a passagem da corrente
que injeta os portadores. No 2N2646 I
V
= 6mA.
Resumi ndo :
Para entrar em conduo o UJT precisamos vencer VP, aplicando no
emissor uma tenso superior VP = jVBB + VD.
Para cortar o UJT precisamos baixar a corrent e abaixo de I
V
.
27
Na seo seguinte veremos circuitos com UJTs.
O circuit o com unijuno mais conhecido o oscilador de relaxao, cujo
circuit o most rado abaixo. Chamamos de oscilador porque ele oscila
numa deter minada freqncia e de relaxao porque ele entra em oscilao
sozinho e fica oscilando sempre, enquant o houver uma tenso
aliment ando o circuito. Vejamos seu funcionament o:
Inicialment e o circuito est em repouso. Ao ligarmos a aliment ao o
capacit or C comea a se carregar via R, enquant o o UJT fica bloqueado por
ter tenso de emissor menor que VP. Assim que a tenso sobre C atingir
VP, o UJT passa a conduzir e o capacitor se descarrega via RB1, at que a
tenso sobre ele atinja VV. Neste ponto o UJT corta outra vez e o capacitor
recomea seu ciclo de carga, indo at VP e disparando novament e o UJT. As
formas de onda no emissor e sobre RB1 ficam como most rado abaixo,
direita do circuito, sendo no emissor a de cima e em RB1 a de baixo.
A sada do circuito em RB1 usada para disparar SCRs e TRIACs. Este
pulso bem adequado para disparo de tiristores, desde que a tenso sobre
RB1 atinja um valor suficiente para dispar ar o tiristor desejado. O valor de
RB1 em geral bem baixo, menor que 100 , embora possamos encontr ar
valores de at 2Kem algumas aplicaes especiais. J RB2, que serve para
compensar o UJT em temperat ura, tem seu valor aproximadament e
definido por RB2 = 10
4
/ jVs.
A deter minao de R, em srie com C, tem que obedecer dois quesitos:
1) Se R for muito grande, o UJT no dispara, pois a queda de tenso sobre
ele fica to grande que no atingimos VP. Para evitar isso usamos :
R
VSVP
IP
2) Se R for muito pequeno, o UJT no corta, pois a queda de tenso sobre
ele fica to pequena que no atingimos VV. Para evitar isso usamos :
R>
VSVV
IV
28
A freqncia de oscilao deste circuito razoavelment e independent e de
VS e calculada por :
1
f =
R.C . ln [ 1 / (1- j)]
Com esta frmul a calculamos C, tendo j definido R conforme vimos acima
e sabendo j do nosso UJT.
Os circuitos com UJT so aliment ados por tenses de 10 a 35V. Quant o
mais baixo VS, menor o pulso sobre RB1. Quanto mais alto VS maior a
dissipao de potncia sobre o UJT. Dependendo do valor de VS,
escolhemos um RB1 que garant e que no iremos atingir a tenso de
disparo do tiristor antes de completar a carga do capacitor C. Isto se faz
vendo a tenso mxima que o tiristor aceita no gatilho sem que haja
disparo. Esta tenso chamada de VGD. Assim temos:
VGD>
RB1.VS
RB1+RB2+RBBmin
O valor de VS tambm influencia o valor de VP, pois temos que vencer o
divisor interno do UJT mais a queda no diodo do emissor. Assim
VP = jVS + VD = jVS + 0,5
A largura do pulso de disparo do tiristor dada pelo tempo de descarga do
capacit or, como most ra o grfico da figura anterior, sendo definida por:
Tg = RB1. C.
Exemplo de clculo de oscilador de relaxao:
Projete um circuito igual ao acima usando um UJT com os seguint es
parmet r os: j = 0,51, IP = 10 A, IV = 10 mA, VV = 3,5. Use freqncia de
60 hz e largura de pulso Tg = 50s, VS = 30V.
Partimos determi nando VP = jVS + 0,5 = 0,51 x 30 + 0,5 = 15,8V.
Com isto podemos determi nar o mnimo e o mximo de R:
R < (30 - 15,8) / 10A = 1,42 MD
R > (30 - 3,5)/ 10 mA = 2,65 KD
Definindo C = 0,5jF, temos: f = 60 Hz = 1 / [R x 0,5 jF x ln (1/1- 0,51)] e
da obtemos R = 46,7KD. Este valor serve pois fica entre o mximo e o
mni mo. Poderamos tambm escolher um R 3 a 6 vezes o valor mnimo
(10,95 KD a 15,9 KD) e da definir C pela mesma frmula da freqncia.
29
Falta definir RB1 e RB2. RB1 tiramos da largura do pulso:
RB1= Tg/C = 100 D
RB2 = 10
4
/ jVs = 654 D.
Exerccio:
Calcule um oscilador de relaxao com freqnci a de 400Hz, usando um
2N2646 aliment ado por 15V. Este oscilador deve disparar um TRIAC
TIC226 que tem VGD = 0,3V e VGT = 1,4V. Dados do 2N2646 : IP max = 5
A, IV min = 4 mA, VV = 2V, RBB min = 4,7KD e j = 0,65.
UNIJUNO PROGRAMVEL (PUT)
O PUT um transist or de unijuno que mais parece com um tirist or. Seu
smbolo j indica isto, confor me vemos abaixo. Ele funciona como um
unijuno, exceto que podemos programar seu VP atravs do terminal de
gatilho. Enquant o a tenso de anodo (VA) for menor que a tenso no
gatilho (VG), o PUT fica em bloqueio. Se VA for igual a VG + VD (queda no
diodo interno), atingimos VP e o PUT dispara. Os pontos de IP e IV
dependem da impedncia equivalente do gatilho RG = R1R2/ (R1+R2) e
tambm da tenso de aliment ao. Abaixo most ramos um oscilador de
relaxao com um PUT.
+
VS
RS
R2
R1
R
C
PUT
VP definido pelo divisor entre R1 e R2: VP = VS
Desta forma a razo de afastament o j =
VP
VS
=
R2
R1+R2
Diferentement e do UJT, o PUT permite programar j . A freqncia do
oscilador dada por R e C e pela razo do divisor entre R1 e R2, sendo
calculada por:
1 1
f = =
RC ln ( 1 + R2/R1) RC ln [VS/ (VS- VP)]
30
Para deter minar R1 e R2 usamos a razo de afastament o desejada, j, e
calculamos
R1 = RG / j e R2 = RG / (1- j)
A corrent e de gatilho no pont o de vale IG = (1- j) VS/RG
O tempo de pulso dado por : TG = RS . C
Exerccio:
Calcule os resistores para um oscilador com PUT, aliment ado por VS = 30V
e numa freqncia de 60 Hz. Use IG = 1mA e defina um pulso na sada
sobre RS de 10V de pico e durao de 50s.
Soluo: Partimos definindo C= 0,5jF e calculamos:
TG = 50s = RS x 0,5jF, logo RS = 100 D
Como queremos que o pulso seja de 10V, usamos VP = 10V e assi m :
j = = 10/ 30 = 1/ 3
A freqncia de 60Hz nos permite calcular R :
1/f = 1/60 = R.0,5jF ln [VS/ (VS - VP)] =
1/f = 16,66ms = R 0,5j ln [30/(30- 10)]
logo R = 82,2KD. Partindo de IG = 1mA = (1- j) VS/RG ,temos
RG = [(1- 1/ 3) 30] / 1mA = 21KD
Assim definimos os dois ltimos R1 e R2: R1 = RG/ = 20K x 3 = 60KD
e
R2 = RG/ 1- = 30KD
A sada deste oscilador, sobre RS pode disparar um tiristor com pulsos de
pico de 10V e durao de 50s.
31
PRTICA UNIJUNO E SCR
OBJETIVO: Familiarizar - se com o UJT e sua aplicao prtica.
EQUIPAMENTO:
Osciloscpio
Fonte CC
MATERIAL:
TRIAC TIC226D
Resistores 220 D e 1K
Potencimet r o 100K
Capacitor 0,1jF/400V
Lmpada 60W, 220V
PROCEDIMENTO:
1) Monte o circuito abaixo. Ajuste a fonte para 15V e o potencimet ro
para 23K8 ohms;
2) Conecte o osciloscpi o sobre RB1 e observe a forma de onda;
3) Conecte o osciloscpio sobre RB2 e observe a forma de onda;
4) Conecte o osciloscpi o sobre C e observe a forma de onda;
ATENO : CUIDADO AO TRABALHAR COM A TENSO DA REDE
5) Conecte o osciloscpi o sobre a carga e observe a forma de onda;
6) Varie o potencimet ro at seu valor mximo e v observando a forma de
onda;
7) Calcule a freqncia mxima do oscilador;
8) Mea VP e compare com o exerccio de UJT da pgina 28.
+
-
15V
+
-
220V/60Hz
TIC226
100k
RB1
220
RB2
1K
2N2646
.1uF
32
RESUMO DE TIRISTORES:
Os tirist ores so muito teis no cont role de potncia. Sua caracterstica
bsica serem disparados por um pulso e assim entrar em conduo.
Vrias so as maneiras de disparar os tiristores. Aqui estudamos rede
resistiva, rede RC, DIAC, UJT, PUT, SUS, SBS. Alm destes, podemos acionar
os tiristores direto de circuitos digitais, como microprocessador es e portas
lgicas, as quais acionam transistores que chaveiam pri mrios de
transfor madores de pulso. Os secundri os destes transfor madores so
ligados no gatilho dos tiristores.
Existem tambm circuitos integrados especficos para disparo de tiristores,
como o TCA 785 da Siemens. Estes CIs possuem detet or de passagem por
zero, compar ador da carga de um capacitor externo com uma referncia
tambm externa e sadas de pulsos direto para o gatilho de tirist ores.
Outra opo so os optoacopladores para disparo. Alguns possuem um
Led na entrada e um TRIAC na sada. Este TRIAC pode acionar uma
pequena carga ou ento acionar um TRIAC de maior potncia. Podemos
usar os opto comuns com transist or na sada, que acionam
transfor madores de pulsos, como citamos acima.
Sempre que usarmos transfor mador es de pulso temos que observar uma
condio: com cargas indutivas o tiristor s comea a conduzir alguns
milisegundos aps o disparo, pois a corrente est atrasada em relao
tenso. Assim demor a este tempo at atingir IH. Para garantir que o tiristor
entre em conduo precisamos aument ar a largura do pulso de disparo.
Usando DIACs, UJTs, SBS, etc no tem problema. Mas com
transfor madores de pulso, um pulso mais largo pode saturar seu ncleo. A
fim de evitar isto comum usar mos um trem de pulsos de freqncia mais
elevada, em vez de um s pulso de maior durao. Quanto maior a
potncia do tiristor, mais cuidado temos que ter com este fato. O trem ou
seqncia de pulsos normal ment e gerado por um oscilador tipo 555 que
iremos estudar em seguida. Estes pulsos passam ou no ao transformador
dependendo de uma lgica de controle.
Abaixo ilustramos o circuito genrico dos tiristores, que serve para SCRs e
TRIACs. As variaes so todas no circuito de dispar o, que pode ter ainda
uma rede RC para defasament o do ngulo de dispar o. Este circuit o de
disparo pode ter tambm entradas externas de controle.
33
d is p a r o
c ir c u i t o
d e
+
-
C a r g a
S C R
+
-
R e d e
CI 555
Vamos estudar agora um dos CIs mais versteis na eletrnica. Ele um CI
chamado de tempori zador, que antes era implement ado com transist ores,
resistores e capacitores. De tanto ser usado em aplicaes as mais
variadas, os fabricantes de CIs resolveram implement ar a funo num
chip. A grande simplicidade de seu uso tornou este CI muito popular.
Existem livros exclusivament e de aplicaes do 555.
O 555 um circuito de tempori zao muito estvel, capaz de gerar tempos
de pulso ou oscilaes em freqncia com bastant e preciso. Ele possui
tambm terminais externos para disparo ou reset. Os tempos de operao
seja em modo monoest vel ou astvel so determi nados apenas por
resistores e capacitores.
A operao dita em modo monoest vel quando o circuito tem um estado
estvel permanent e e outro estado quase estvel. Um disparo externo
causa uma mudana do estado permanent ement e estvel para o estado
quase estvel, onde ele fica por um tempo determinado, retornando ento
ao estado estvel. Ou seja, o circuito gera apenas um pulso cada vez que
disparado. Nesta situao o 555 precisa apenas de um capacitor e um
resistor na rede que define o tempo ou largura do pulso.
J a condio astvel aquela onde o circuito possui dois estados
temporri os, oscilando entre um e outro, com um perodo (inverso da
freqncia) e um ciclo de trabalho determinados pelos element os do
circuit o. Nesta situao o 555 precisa apenas de um capacitor e dois
resistores na rede que define o tempo ou largura do pulso.
Abaixo ilustramos um bloco diagrama da estrut ur a interna do 555 que nos
permite compreender seu funcionament o:
Pino 8 VCC
5K
Limiar Descarga
6 7
5 R
Controle Q
5K
3
Disparo S Sada
2 Reset
5K
1 Terra 4 Reset
34
Como podemos observar o 555 consist e de dois compar adores, um flip-
flop RS e um circuito de sada. O comparador de baixo compara a tenso
de disparo com 1/ 3 de VCC e seta o flip- flop. J o de cima compara a
tenso de controle com a tenso de limiar (tenso no capacitor) e reseta
o flip- flop. A sada do flip- flop usada a
Q que fica alta quando
resetamos e baixa quando setamos o flip- flop.
No modo monoest vel o circuito o mostrado abaixo. Notem que os
terminais de limiar e de descarga esto conectados juntos. Quando a
tenso de disparo estiver abaixo de 1/ 3 de VCC, a sada do comparador de
disparo seta o flip- flop. Isto leva
Q para baixo, o que corta o transist or
de descarga e leva a sada para cima. Com o transist or de descarga cortado,
o capacitor comea a se carregar de forma exponencial com um tempo
dependent e dos valores de RA e C. Quando a tenso no capacitor atingir
2/3 de VCC o compar ador de limiar reseta o flip- flop. Isto leva
Q para
cima, o que satura o transist or de descarga e leva a sada para baixo. Com
o transist or de descarga conduzi ndo a pleno, o capacitor se descarrega. O
tempo em que a sada fica alta dado por:
t = 1.1 RA . C
Uma vez disparado o flip- flop por um sinal externo, ele no pode ser mais
disparado enquant o durar o pulso de sada, dado pela equao acima.
Desta forma a largura do pulso de disparo tem que ser menor que o tempo
do pulso de sada.
35
1
4
8
Abaixo apresent amos as formas de onda sobre o capacitor C(onda inferior)
e sobre a carga RL (onda superior). Observem que a carga pode estar da
sada para o terra, como pode estar da sada para o VCC.
As formas de onda da entrada (no terminal de disparo ou trigger) e de
sada so as mostr adas abaixo. Notem que o disparo acont ece na descida
do pulso de trigger, quando o sinal no pino 2 fica abaixo de 1/ 3 de VCC.
Com isto o flip- flop vira e a sada sobe. Passado o tempo do pulso 1.1RA.C
o capacitor se descarrega e o circuito aguarda a nova descida do pulso de
gatilho para um novo ciclo. Se o pulso de gatilho no vem, o circuit o fica
parado. Ele s d aquele pulso 1.1 RA.C e para at receber novo disparo.
possvel disparar o 555 como monoest vel apenas dando um pulso para
terra no pino 2. Isto pode ser feito ligando um transist or como chave do
pino 2 ao terra e acionando este transist or com um sinal de controle na
base toda vez que quiser mos que nosso monoest vel gere seu pulso.
Tambm possvel usar a sada de um monoestvel para disparar outro
monest vel, ligando o pino 3 do primeiro ao 2 do segundo via um
capacit or em srie ligado ainda via um resistor ao VCC. Com este esquema
em cascata podemos fazer um circuito correr por 1 segundo, por exemplo,
e disparar outro que vai por mais 10s e aciona um terceiro por mais 50s e
assim por diante.
O pino de reset (4) fica ligado ao VCC no circuito acima. No entant o
podemos chave- lo entre VCC e terra. Ao levarmos o reset para terra
estaremos forando uma descarga do capacitor e consequent ement e
interrompemos o ciclo de temporizao. Enquant o o reset estiver baixo o
36
Disparo
Sada
Tp = 1.1RAC
dis paro
o
Tens o no capacit or
Sada
capacit or no se carrega. Ao elevarmos a tenso no pino 4 (reset) a sada
continua com estava, s se alterando quando for disparada pelo pino 2. Se
no pretendemos interromper a tempori zao devemos manter o reset
sempre em VCC.
Exerccios:
1) Como voc faria para interromper um monoest vel com 555 usando o
pino de reset?
2) Calcule uma rede RC para gerar um tempo de 10s, para uso, por
exempl o, numa minuteira. Como voc dispararia esta minuteira no pino 2?
Operao do 555 como astvel . Nesta configurao o 555 ligado de
formas a se disparar por conta prpria fazendo com que a tenso no
capacit or oscile sempre entre 1/ 3 e 2/ 3 de VCC. Veja o circuito abaixo que
mostra como ligar o 555 em modo astvel. Nesta configurao o capacitor
se carrega at 2/3 de VCC atravs de RA e RB e se descarrega at 1/ 3 de
VCC via RB. Notem que o tempo de carga e descarga independent e de
VCC.
Neste circuito o tempo de carga, que aquele com a sada em nvel alto,
dado por:
t
1
= 0.695 (RA + RB) C
O tempo de descarga, que aquele com a sada em nvel baixo, dado por:
t
2
= 0.695 (RB) C
37
1.44
(RA + 2RB)C
O perodo total dado por: T = 0.695 (RA + 2RB) C
A freqncia o inverso de T e fica: f =
O ciclo de trabalho dado por : CT = RB/ (RA + 2RB). A fim de obter o
maior ciclo de trabal ho possvel temos que diminuir RA ao mximo. Isto
tem um limite, pois a corrent e mxima que pode circular pelo transist or de
descarga de 200mA. Assim o valor mnimo de RA dado por:
RA>
VCC
0.2 A
A ilustrao abaixo mostra as formas de onda do circuit o astvel com 555.
O sinal de cima a sada e o de baixo a tenso sobre o capacit or C.
Podemos observar a tenso no capacitor oscilando entre 5V e 10V, num
circuit o aliment ado por VCC = 15V. A sada neste mesmo circuito vai de
zero a quase 15V, dependendo da carga. Se neste circuito a carga exigir o
mximo que o 555 pode dar (200mA) a sada fica limitada a 12,5V,
tipicament e. Com carga de 100mA a tenso j vai at 13,3V. por outro lado
a sada baixa a zero se a corrent e a ser drenada baixa (menor que 10mA).
Se a corrent e a drenar for de 200mA com sada baixa, a tenso fica em
torno de 2,5V !! A corrent e a drenar fica alta quando a sada for baixa, se
RL for pequeno (prximo de VCC/0.2) e for ligado ao VCC e no ao terra.
Portant o ateno a este pont o.
Apresent amos abaixo todas as caractersticas eltricas do 555, dadas pelo
fabricante:
38
Sada
10V/ div
Tenso s obre
C 5V/ div
PRTICA COM 555
OBJETIVO: Montar um multivibrador em modo monoest avel e astavel para
conhecer as caractersticas prticas do CI 555.
EQUIPAMENTO:
Osciloscpio
Gerador de sinais
Fonte CC
MATERIAL:
CI 555
Resistores 560 D e 1K(3 peas)
Potencimet r o 470KD
Capacitores 0,1jF e 0.01 jF
Transist or BC548
LED, diodos 1N4007 (2)
PROCEDIMENTO:
1) Monte o circuito abaixo num protoboar d;
39
2) Ajuste a fonte para 12V e o potencimet ro para 100K;
3) Feche a chave 1;
4) Observe que o LED acende, indicando que temos pulso na sada do 555
(pino 3). Mea o tempo do LED ligado com um cronmet r o;
5) Desligue a fonte, ligue o pino 2 ao 6 e troque o curto entre os pinos 6 e
7 por um resistor de 1KD, substit ua o potencimet ro por outro resistor
de 1KD;
6) Ligue a font e e observe a forma de onda na sada, medi ndo sua
freqncia. Observe tambm a forma de onda sobre o capacitor C =
1uF ;
7) Monte agora o circuito da pgina seguinte e ajuste o potencimet r o de
470K para obter ciclos de trabalho de 20% e de 80%.
Apresent amos a seguir um circuito que pode ser til quando queremos ter
um ciclo de trabalho de 50%. Na configurao astvel que vimos antes os
tempos nunca podem ser iguais, j que o tempo de carga 0.695 (RA+RB)C
e o de descarga 0.695 (RB)C. Na configurao abaixo no apenas
podemos ter ciclos iguais, como tambm podemos variar o ciclo de
trabalho variando o potencimet ro. Com ele ajustado para 50% para cada
lado o ciclo de 50%. Com ele ajustado para 66%, teremos o lado com 66%
ficando 2/ 3 do tempo ativo. Ou seja, se o lado da carga do capacitor estiver
com 66% da resistncia teremos a sada alta por 66% do tempo.
Notem que esta configurao bem diferent e da que vimos, mas funciona
igualmente. Quando ligamos o circuito o capacitor estar descarregado,
portant o teremos no pino 2 (disparo) uma tenso menor que 1/3 de VCC,
logo a sada (pino 3) estar alta. Esta sada carrega o capacit or via D1.
Quando a tenso no capacitor atingir 2/3 de VCC o flip- flop interno
resetado e a sada baixa, descarregando o capacitor via D0. Quando a
40
tenso em C cair abaixo de 1/ 3 de VCC o flip- flop ser setado e tudo volta
ao incio.
O 555 pode acionar direto SCRs e TRIACs dentro dos limites de corrent e
(200mA) que ele pode fornecer. Podemos fazer um tempori zador para
disparo de cargas AC que liga a carga apenas passados alguns segundos ou
minut os aps ligarmos o circuito. Para tirist ores de maior potncia, o 555
pode acionar transist ores ou tiristores menores, que por sua vez disparam
tirist ores maiores.
Outro uso do 555 como gerador de clock para circuitos digitais que no
requerem uma tempori zao muito precisa. Muitas aplicaes digitais
podem conviver com clocks que no precisam ser originados de cristais.
Nestes casos o 555 uma boa opo, alis uma opo bem comum de ser
usada quando precisamos sincronizar algum acionament o com uma
tempori zao especfica. Mas este um assunt o para a rea de Circuitos
Digitais.
VCO
J que estudamos os osciladores com unijuno e com o 555, podemos
falar de um tipo especial de oscilador que o VCO - Voltage Controlled
Oscilator ou oscilador controlado por tenso. Este tipo de oscilador pode
ser feito com um 555 ou pode ser implement ado com operacionais. Sua
aplicao principal em circuitos de modulao de freqncia (FM) ou
como conversores de tenso em freqncia. O VCO tem uma sada numa
freqncia cont rolada por uma tenso na sua entrada. Em circuitos FM a
sada senoidal, j num 555 a sada em pulsos, que podem passar por
um filtro e ser transfor madas em senides.. Em sadas senoidais podemos
ter a senide at bem distorcida. O que import a num VCO a linearidade
da variao de freqncia em relao a tenso de controle e a faixa de
freqncias em quer o VCO trabalha. Valores tpicos de linearidade esto
41
na faixa de 1% enquant o as faixas de freqncia so da ordem de 100:1,isto
a freqncia de sada varia de 100 vezes a variao da tenso de entrada.
A relao entre entrada e sada tpica most rada abaixo:
Notem na figura que quando a tenso de entrada sobe, a freqncia
aument a e quando a tenso desce na entrada, a freqncia diminui. Neste
grfico a relao entre freqncia de sada e tenso na entrada de 100:1.
Isto caracteri za um VCO de faixa larga.
Com um 555 podemos montar um VCO simplesment e a partir de um
astvel com a tenso de cont role (pino 5) varivel. Lembrem que a tenso
de controle uma das entradas do compar ador de limiar, que seta o flip-
flop e aciona o transist or de descarga do capacitor. Se o pino 5 estiver em
abert o a tenso ali de 2/3 de VCC. Se conectamos ali uma tenso varivel
podemos mudar o moment o em que o capacitor ir se descarregar.
Aument ando a tenso de controle leva mais tempo para o capacitor chegar
ao novo limiar e assim a freqncia diminui. A tenso externa no pino 5
altera o divisor de tenso interno do 555 e assim a tenso no capacitor em
vez de variar entre 1/3 e 2/ 3 de VCC varia entre V
contr
e V
contr
/2. Usando um
potencimet r o no circuito astvel como mostrado abaixo suficient e para
variar V
contr
.
42
Neste esquema o 555 est mais para um modul ador de largura de pulso
(PWM) que para um VCO, pois a tenso na entrada varia pouco em relao
sada e estamos de fato controlando a largura dos pulsos de sada via
uma tenso CC na entrada(pino 5).
Os circuitos de VCO com operacionais implicam em conhecer
multiplicadores, integradores e mdul os de seno/ coseno que no tivemos
tempo de cobrir com os Opamp. A literat ur a tcnica e a internet podem
fornecer maiores detalhes a quem se interessar.
PLL
O PLL usado na funo inversa do VCO. O VCO usado para modular
sinais, enquant o o PLL usado em circuitos demodul adores para garantir
uma boa demodulao em ambient es com rudo intenso. PLL quer dizer
phase locked loop ou seja malha de fase travada. Mas o que significa isto?
Este circuito trava um sinal de entrada somente quando a diferena de fase
entre ele e o sinal de controle estiverem em fase. O bloco diagrama o
mostrado abaixo:
43
O primeiro estgio de um PLL o compar ador de fase que compara a
diferena de fase entre os dois sinais, o de entrada com o da sada de um
VCO. Este sinal da diferena entre fases passa por um filtro passa baixa e
amplificado para cont rolar o VCO. Assim a freqncia de sada do VCO vai
variar at que o ngulo de fase entre esta sada e o sinal de entrada seja
zero. Diz- se ento que os dois sinais esto travados em fase.
Um PLL pode ser feito tambm com operacionais, porm temos opes de
CIs pront os com PLL. Um exemplo o NE565 de Signetics, cujo bloco-
diagrama interno mostr amos abaixo, junto com um esquema tpico de
circuit o. Notem o 741 na sada dando maior ganho ao sinal de sada. Este
circuit o usado para demodular sinais de FM. Alm disto podemos tirar
dele uma onda quadrada e uma triangular. Hoje existem CI pront os para
circuit os AM e FM que incorporam todas as funes de
modular / demodul ar os sinais, alm de sintonia, FI e outras que tornam o
seu uso em rdios muito simplificados. Estes CIs usam PLL e VCO dentr o
deles para execut ar estas funes.
44
PRATICA VCO
OBJETIVO: Montar um multivibrador com o CI 555para ser controlado por
tenso externa, que varie a largura dos pulsos em funo desta tenso.
EQUIPAMENTO:
Osciloscpio
Gerador de sinais
Fonte CC
MATERIAL:
CI 555
Resistores 10KD (2) e 4K7
Potencimet r o 10KD
Capacitor 0,022 jF
PROCEDIMENTO:
1) Monte o circuito abaixo num protoboar d;
2) Ajuste a fonte para 15V e o gerador para 8 kHz, onda quadrada,
amplitude 5 V;
3) Ligue o gerador no pino 2 do 555 e alimente o circuito;
4) Observe as formas de onda na sada (pino 3) e no capacitor (pino 6).
Mea a largura do pulso de sada;
5) Varie o potencimet ro at ter a tenso mnima no pino 5 e observe as
mesmas formas de onda do passo 4, registrando o valor da largura do
pulso na sada;
6) Varie o potencimet ro at ter a tenso mxima no pino 5 e observe as
mesmas formas de onda do passo 4, registrando o valor da largura do
pulso na sada;
7) Desmont e o circuito e guarde o material. Faa relatrio da aula prtica.
4 k 7
1 0 k
8 . 0k H z
0 / 5 V
+
1 5 V
. 0 2 2 u F
1 0 k 1 0 k
G n d
T r g
O u t
R s t C t l
T h r
D i s
V c c
5 5 5
45
MOTORES DE PASSO
Um item import ant e que devemos conhecer so os motores de passo,
muit o usados em discos rgidos e drives de disco flexveis, impressor as
mat riciais, alm de milhares de aplicaes em robtica e automao. Estes
motores, como os demais motores, operam dentro de princpios do
eletromagneti smo. Nos motores de passo os magnetos so mont ados
sempre em pares que criam os dois plos magnticos que se atraem.
Uma das primeiras coisas que notamos ao ver um motor de passo que ele
no possui apenas dois fios, como os motores CC comuns. Os motores de
passo tem pelo menos 4 fios, existindo verses com 6 ou mais fios. Outro
fato marcant e que, ao tocarmos seu eixo, no consegui mos mov- lo.
como se num motor comum os rolament os estivessem engripados. Como o
prprio nome j diz, os motores de passo avanam passo a passo, um
passo de cada vez, confor me formos atuando no seu comando ou controle.
A figura abaixo ilustra um interior de um motor de passo, de forma
resumi da. O rotor uma barra magntica que gira em torno de seu centro.
Podemos ver dois enrolament os, cada um formando um eletromagnet o e
com uma polaridade diferente em cada ponta. Ao aplicar mos uma tenso
ao enrolament o 2 de formas a criar um plo Sul na extremidade superior
(A) e um plo Norte na inferior (B), foraremos o rotor a se posicionar
como mostra a figura. Para criar estes plos devemos seguir a famosa
regra da mo direita e aplicar uma tenso correspondent e.
Enquant o mantiver mos a tenso aplicada ao enrolament o o rot or ficar
no apenas alinhado na posio, como tambm ficar como que travado
ou freado nest a posio. Isto persiste indefini dament e, a menos que
apliquemos uma fora muito grande no eixo que vena a atrao magntica
entre os plos.
Muito bem, o motor est parado, mas como faz- lo se mover? Se tiramos
a tenso do enrolament o 2 e aplicamos esta mesma tenso ao enrolament o
46
1, os plos A e B no tero mais atrao magntica, mas os plos C e D
tero. A figura abaixo ilustra esta situao:
A polaridade da tenso aplicada leva o plo C a ser Sul e o plo D a ser
Norte. Com isto o rotor gira 90 graus em sentido horrio. Claro que este
um moviment o grosseiro e serve apenas para ilustrar como as coisas
funcionam num motor de verdade. Para fazer o motor continuar girando
em sentido horrio precisamos tirar a tenso do enrolament o 1 e voltar a
aplic- la no 2, porm com polaridade invertida . Isto cria em A um plo
Norte e em B um Sul. Como mostra a figura abaixo:
Procedendo nesta seqncia, tiramos a tenso do enrolament o 2 e
aplicamos no 1, com polaridade invertida em relao primeira vez e
assim por diante. Desta forma fazemos o motor girar no sentido horrio,
aplicando a tenso e retirando- a, aplicando no outro enrolament o e depois
voltando aplicar no primeiro com polaridade invertida, etc... Mas para
47
girar no sentido anti - horrio o que fazemos? simples. Removemos a
tenso do segundo enrolament o e aplicamos no primeiro, porm neste
caso com polaridade tal que leve o plo C para Norte e o D para Sul.
Assim consegui mos fazer o nosso motor de passo girar em passos de 90
graus num sentido ou noutr o. Ele faz isto com preciso e se mantm firme
na posio correspondent e tenso e polaridade aplicada. A nica coisa
que faz com que ele no siga esta regra se a carga no eixo for tal que
rotor no consiga mov- la ou ento que a tenso aplicada no seja
suficiente para criar o campo magntico necessrio.
O motor do nosso exemplo tem 4 passos por volta e da maneira aqui
descrita estaremos dando um passo inteiro (full step). possvel fazer este
mesmo motor andar em meio passo (half step) de cada vez e assim
teremos 8 passos por volta, com cada passo tendo 45 graus. Para dar meio
passo o que fazemos aplicar tenso a ambos enrolament os
simultaneament e. Com isto criamos um campo magntico result ant e, que
o somat rio vetorial de cada um dos campos criados nos enrolament os.
Para que os efeitos sejam iguais nos 2 enrolament os necessitamos aplicar
tenses iguais a fim de criar campos magnticos de mesma intensidade,
porm de direes diferentes. A figura abaixo ilustra a seqncia de meio
passo para o mesmo motor most rado acima.
48
Bom, mas e como so os motores de passo reais? Por enquant o vimos
exempl os com passos de 90 ou 45 graus e os mot ores de passos pequenos,
tipo 1,7 graus por passo, como so?
Na prtica, a parte fixa do motor (o estator) dos motores reais tem mais
segment os que o nosso exemplo e tambm o rotor diferent e, como nos
mostra a figura abaixo:
A figura ilustra um mot or de 8 sees, separadas uma da outra por 45
graus. O rotor tem seis sees separadas por 60 graus uma da outra. O
moviment o real do rotor neste exemplo ser de 60- 45 = 15 graus por
passo. Como isto? Vamos supor que no nosso exemplo as sees A, C, E
e G estejam bobinadas juntas, assim como as sees B,D,F e H. Se
aplicamos uma tenso tal que a polaridade seja:
A = Sul
C = Sul
E = Norte
G = Norte
O rotor se alinha de forma correspondent e, com mostra a figura acima. Se
quisermos deste ponto mover 15 graus em sentido horrio, temos que tirar
a tenso do enrolament o ACEG e aplicar no BDFG desta forma:
B = Sul
D = Sul
F = Norte
H = Norte
Se quisssemos ir em sentido anti - horrio teramos que ter polaridade
opost as em BDFH.
Os mot ores reais tem estatores com mais de 8 sees e rotores com mais
de 6 sees, mas o principio de funcionament o o mesmo. O que
precisamos saber de um motor de passo :
n Tenso nominal - as vezes precisamos exceder esta tenso para obter
maior torque
n Resistncia do enrolament o - nos dir o consumo de corrent e do motor
49
n Graus por passo - este o fator mais import ant e na escolha de um step
motor. Os valores mais comuns so: 0,72 ; 1,8 ; 3,6 ; 7,5 ; 15 e at 90
graus por passo. Acionando em meio passo podemos cortar este valor
pela metade.
TIPOS DE MOTOR DE PASSO
Os motores de passo so de dois tipos distintos: im permanent e ou
relutncia varivel . Cada tipo precisa de um acionament o diferent e. Os
motores de im permanent e podem ser divididos em: unipolares, bipolares
e multi - fases.
Motores de im permanent e unipolares tem seu acionament o muit o
simples. Basta um contador 1- de- N para gerar a seqncia de passos
adequada e drivers tipo um transistor por enrolament o para acionar
motores unipolares. Estes motores caracteri zam- se por terem
enrolament os com derivao central (center - tape). Normal ment e
aliment amos os motores pela derivao central e os acionadores ou drivers
simplesment e aterram cada enrolament o que queremos energizar. A figura
abaixo ilustra este tipo de cont role:
Um circuito tpico de acionament o most rado abaixo:
50
O nmero de fases de um motor de passo unipolar de duas vezes o
nmero de enrolament os, j que cada enrolament o dividido em dois pelo
center tape. Notem tambm os diodos para evitar a tenso emf quando
cortamos os transi st ores. Outros circuitos de acionament o de motores
unipolares so mostrados abaixo. Qualquer coisa que chaveie funciona,
desde chaves manuais at MOSFETs de potncia. Estes circuitos so
compatveis com TTL. O SK3180 um darlington com ganho acima de
1000, assim os 10 miliamperes via os 470 ohms mais que suficiente para
acionar o transist or que suport a alguns ampres do motor. J o IRC IRL540
um power FET, capaz de conduzir at 20 A, suport ando picos de tenso
de at 100V. Assim ele pode agent ar os picos reversos ao desligar os
enrolament os sem diodos de proteo, se estiver preso a um bom
dissipador de calor. Se o FET falhar o zener e o resistor de 100 ohms
protegem o circuito TTL.
Aplicaes que requerem correntes menores que 500mA por enrolament o
podem usar um CI tipo o ULN 2003 da Allegro (ou o DS2003 da National ,
ou o Motorola MC1413), que consiste num conjunt o de darlingt ons. Estes
CIs permi tem acionar mlti plos enrolament os ou outra cargas indutivas
diretament e de circuitos lgicos tipo TTL. A figura abaixo mostr a o
esquema e a pinagem do ULN2003, que contm 7 darlingtons, com entrada
TTL:
51
Os resistores de base dos darlingtons so dimensionados para aceitar
sinais TTL. Cada darlington tem seu emissor conect ado ao pino 8, que
um terra. Tambm cada transist or tem dois diodos de proteo, um
protegendo contra tenses reversas sobre o transi st or e outro ligando o
coletor ao pino 9. Se o pino 9 for ligado aliment ao do mot or, este
diodo proteger o transist or cont ra picos indutivos.
O ULN2803 um CI igual ao 2003 s que com 18 pinos contendo 8
darlingtons, permitindo o uso de um s CI para acionar um par de motores
unipolares. Para motores de menos de 600mA por enrolament o, o
UDN2547B aciona todos os 4 enrolament os de um motor unipolar. Para
motores de menos de 300mA por enrolament o, o SN7541 da Texas, aciona
dois enrolament os de um motor unipol ar.
Motores de passo bipolares requerem circuitos de acionament o mais
complexos, no entant o exibem uma excelente relao torque/ t amanho.
Motores bipolares tem enrolament os separados que tem que ser acionados
em ambas direes, o que implica em troca de polaridade durant e sua
operao. Isto represent a um desafio a mais no projet o dos acionadores.
Seu funcionament o como os unipolares, exceto quer em vez de acionar
ou cortar o sinal nos enrolament os, precisamos aplicar uma tenso
positiva ou negativa a eles. Para fazer os motores bipolares girar temos que
ir acionando um enrolament o com polaridade +, da o outro tambm com
+ , ento o primeiro com - dai o segundo tambm com - . Abaixo
apresent amos uma tabela de como vai a seqncia para um motor bipolar
de dois enrolament os.
Acionar estes motores bipolares geral ment e feito com circuitos ditos
pont es H (H- bridges). Estas pontes podem ser mont adas com transi st ores e
tambm existem implement adas em CIs tipo o National LMD18245T. Estes
CIs possuem apenas uma ponte H, assim precisamos dois CIs para acionar
um motor bipolar. Abaixo apresent amos um circuito de ponte H com
transist ores. Esta verso usa um CI X- OR 7486 para evitar o problema de
por a fonte em curto se os dois sinais de controle forem para 1. Nesta
situao, sem o X- OR, os dois pares de transist ores iriam conduzir,
tent ando aplicar polaridades + nas duas extremi dades do enrolament o do
motor.
52
Outra caracterstica da ponte H que ela cria tipo um freio eltrico que
pode ser aplicado ao motor para faz- lo parar ou reduzir a velocidade.
Isto se faz aplicando um curto na bobinas do motor, fazendo com quer
qualquer tenso produzi da nas bobinas pelo moviment o de rotao ser
aterrada, dificult ando a moviment ao do eixo. Quant o mais se tent ar girar
o eixo, mais o freio atua.
Abaixo apresent amos o diagrama funcional do LM18200, idntico ao do
LM18201, uma ponte H de 3 A , 55V, com R
DSon
dos MOSFET de 0,3 Ohm.
O funcionament o desta ponte dado pelos sinais de controle dados nos
pinos 3 a 5 confor me a tabela abaixo:
53
O freio aplicado quando mant emos os dois MOSFETs em conduo
(sink1 e sink2). OS pinos de boot st r ap servem para elevar a freqncia de
operao a at 500kHz, via uso de capacitores externos de aprox.100nF.
Sem os capacitores de bootst r ap o circuito funciona bem at 100kHz. Este
capacit or serve para aument ar a carga da bomba de carga que eleva a
tenso de disparo (VGSon) dos MOSFETs a quase 40% acima de VCC. O
compor t ament o do motor aos sinais de controle pode ser visto no
diagrama abaixo:
Precisamos de dois CIs deste tipo para um motor bipolar, sendo um para
cada enrolament o. Estes mesmos CIs podem ser usados para acionar
motores CC com e sem escovas.
54
MOTORES DE RELUTNCIA VARIVEL
Estes motores, tambm chamados de hbridos, so os mais simples de
cont rolar entre os mot ores de passo. Sua seqncia de acionament o
apenas acionar os enrolament os em ordem, um aps o outro, como mostra
a tabela abaixo. Este tipo de motor tem um terminal comum a todos os
enrolament os e as vrias bobinas que sero aterradas pelo acionador, na
seqncia desejada. Os mot ores de relutncia varivel so chamados de
hbridos porque se parecem com os motores CC comuns pois no se sente
aquele click tpico dos passos ao girar o eixo. Como o prpri o nome dele
indica, este motor no permanent ement e magneti zado que nem os
unipolares e bipolares. Sua indut ncia varia confor me a posio do eixo.
Abaixo apresent amos um circuito tpico de acionament o bidirecional para
os motores bipolares, comuns em drives de disket t es e em impressoras.
um circuito com CMOS, portant o pode ser aliment ado por 12V. Este
circuit o faz a lgica de controle, acionando transist ores de potncia
adequada para as correntes do motor de passo.
Uma palavra sobre a aliment ao dos motores de passo: no necessrio
grande regulao na tenso de aliment ao, pois isto no tem grande
influncia no seu desempenho. claro que se aplicamos tenso maior,
temos mais torque e em certos moment os justament e isto que se faz.
55
Mas se um motor de 24 V for aliment ado por 22 ou 26V no far muita
diferena. Sempre que possvel use fontes separadas para os enrolament os
e para o controle, reduzindo assim o risco de danificar o controle com
tenses mais elevadas.
Outro aviso import ant e sobre o acionament o dos motores de passo
direto do PC. Isto possvel e se chama controle completo por software.
Para acionar um ou poucos motores funciona, ma se temos que acionar
vrios motores simultaneament e a coisa complica. Se o programa ou o
processador for lent o, o acionament o prejudicado. Muito import ant e
cuidar de proteger o PC dos picos de tenso no chaveament o do motor. Se
o PC tiver a port a paralela embuti da na motherboar d, pense bem em
comprar uma outra porta paralela para acionar os mot ores. Se der pane
muit o mais barato comprar outra placa paralela do que outra mot herboar d
!
A forma mais adequada de acionar os mot ores de passo via pulsos de
corrente, que geram menos perdas por aqueciment o, causam uma inrcia
menor e permitem um maior torque dos mot ores. Abaixo most ramos os
caminhos da corrente para chaveament o com ponte H. O caminho 1 most ra
o trajet o da corrent e pelos transist ores de chaveament o indo do + para o
terra e passando por um resistor que sente a corrente, gerando uma
tenso proporcional ela. Esta tenso aplicada na entrada de um
comparador cuja sada resete um flip- flop, cortando o chaveament o se a
corrente ultrapassar um limite fixado pela tenso na outra entrada do
comparador (V control). O caminho 2 mostra o trajet o da corrent e ao
cortar mos os transist ores. A descarga da emf gerada pelo chaveament o se
d via os diodos e enrolament o do motor. O caminho 3 uma alternativa
que permite chaveament o mais rpido do motor pois fora a descarga via a
fonte de aliment ao. Desta forma a inrcia menor, sendo a energia
descarregada mais rapidament e.
56
Em 90% dos casos o controle dos motores de passo feito por
microprocessador es que geram a seqncia adequada de pulsos de
cont role. No diagrama acima isto represent ado pelo circuito chopper
(chaveador), que gera um trem de pulsos que seta o flip- flop acionando os
transist ores que fazem a corrente circular pelo enrolament o do motor num
sentido ou nout ro, dependendo do sinal de direo. Devemos sempre
lembrar que para o mot or de passo girar precisamos no apenas aliment -
lo, mas dar pulsos em seqncia adequada para faz- lo andar os passos
necessrios para execut ar sua funo no sistema. Sem um
microprocessador fica complicado fazer um mot or de passo andar para
frente, para trs, parar, dar dois passos para c , trs para l, etc. Se o
sistema requer um mot or que gire num s senti do, dando passos numa
seqncia simples podemos dispensar um microcont r ol ador e fazer uma
lgica simples, tipo um contador 1- de- N como o CD4017, cuja clock
determi na o nmero e a velocidade dos pulsos. Este circuito que
transfor ma os sinais do cont role em nveis para acionar a parte de
potncia costuma ser chamado de tradut or (Translat or, em ingls).
CONTROLADORES
Controladores so dispositivos de controle automticos que permitem a
operao estvel dos processos, mantendo- os dent ro dos parmet r os
desejados. Os controlador es englobam diversos mdul os cujas funes
so:
Determi nar o valor de uma varivel no processo;
Comparar o valor da varivel com o valor de controle;
Gerar um sinal de erro entre estes valores;
Agir sobre a processo visando zerar o sinal de erro.
A funo principal de um controlador mant er o processo sob controle, ou
seja, manter o processo gerando produt os ou operaes de boa qualidade,
dentro de parmet r os determi nados. A qualidade do controle se mede
observando trs objetivos:
1) mnimo desvio em relao ao ponto de controle quando houver
um desvio;
2) mni mo intervalo de tempo para retornar ao pont o de controle;
3) mnima diferena entre a varivel control ada e o pont o de
controle quando houver mudanas no processo.
A figura abaixo ilustra os element os existentes dentro de um controlador
automtico:
57
Podemos perceber no diagrama que este um ciclo fechado de controle,
que realiment a uma poro da sada de volta para a entrada. O ciclo se
inicia coma medio da varivel, atravs de um sensor apropriado. Este
sensor ou transdut or transfor ma a energia de uma forma outra, tendo
para nossos estudos sempre uma sada em sinais eltricos. O sinal do
sensor transmiti do at o controlador propriament e dito, que pode estar
bem distant e do sensor no processo. Este sinal entra no controlador e
manipulado para poder ser medido e comparado. Ao ser medi do, pode ser
mostrado num painel ou indicador. At recentement e todos os
cont roladores tinham indicador embuti do. Hoje com as redes de
instrument ao e CLPs, a medio pode ser transmi tida para uma central
ou painel de controle geral que most ra vrias medies ou indicaes. O
comparador faz a compar ao do sinal medido no processo com o valor
desejado (set - point, em ingls), gerando um sinal de erro compatvel. Este
sinal de erro convertido em um sinal que acionar um elemento de final
de controle, cuja ao no processo ser para trazer o valor da varivel para
o valor desejado, zerando o erro entre eles.
Os tipos de controlador es que existem so:
Liga- desliga ( on- off )
proporcional ( P )
proporcional integral ( PI )
proporcional derivativo ( PD )
proporcional integral derivativo ( PID )
Cada tipo de controlador reage diferentement e a um distrbio no processo.
Distrbio qualquer alterao que mude ou o valor desejado ou o valor
medido, podendo ser interno ou externo ao processo. A seleo do
cont rolador adequado depende das caractersticas do processo a ser
cont rolado.
Controladores tipo liga- desliga so os mais simples existentes e por isto os
mais barat os. O exemplo mais simples um termost at o. Ele s tem duas
posies: ligado ou desligado. Ao ajustar mos um valor desejado, por
exempl o 50C numa est ufa de secagem, e partirmos de uma temperat ur a
58
ambient e de 25C, o termost at o ligar a resistncia da estufa at que a
temperat ura atinja os 50C. No moment o em que a temperat ura atingir o
valor desejado a sada do controlador muda de um extremo a outro,
passando de ligado para desligado. Mas como qualquer processo tem uma
inrcia, ao desligar mos a resistncia em 50C, a temperat ur a na estufa
continua a subir e ultrapassa o valor desejado. Esta ultrapassagem se
chama overshoot em ingls. Mantendo o termost at o desligado a
temperat ura atinge um valor de pico acima dos 50C e comea a cair. Ela
vai baixando lent ament e, pela mesma inrcia, e passa pelos 50C caindo a
um valor menor, dependendo da faixa ou banda neut ra do termost at o. Em
geral nos termost at os bimetlicos existentes no mercado este valor de 3 a
10 C. Se for 3C, o termost at o no ligar antes que a temper at ur a atinja
47C. Neste ponto ele liga, mas com a inrcia a temper at ur a continua
caindo e chega a um valor mnimo, quando comea novament e a subir at
atingir os 50C outra vez. Num processo assim simples temos uma
variao no sinal controlado (a temperat ur a) em torno de 7C, mesmo
usando um termost at o com banda neutra de apenas 3C. A variao do
sinal control ado depende muito da inrcia do processo. A figura abaixo
ilustra esta ao de controle:
Controladores proporcionais (P) so aqueles que produzem uma
reao linear e contnua entre os valores de erro e a sada do cont rol ador.
Isto significa que h uma relao proporcional entre o erro e a sada, ou
seja quant o maior for o erro, maior ser a sada para diminuir este erro.
Quando o erro vai diminuindo, a sada tambm diminui proporcional ment e
at que o erro seja zero. Tomemos um exemplo de uma vlvula que
cont rola o vapor num processo na faixa de 100 a 200 C . Para
temperat uras abaixo de 100 C a vlvula estar total ment e aberta, enquant o
para temperat ur as acima de 200 C ela estar total ment e fechada. O ponto
de controle deste processo est em 150 C, que fica no meio da faixa entre
100 e 200 C. Se a temperat ur a estiver em 125 C a vlvula estar 75% aberta
e se estiver em 175 C estar 75% fechada. O grfico abaixo ilustra esta
operao. Chamamos de faixa ou banda proporcional a faixa de valores
onde existe a ao proporcional. No exemplo a banda de 100 C, pois o
59
cont role proporcional entre 100 e 200 C. Normal ment e a banda
expressa em percent ual do total da faixa ou escala do instr ument o de
cont role. No grfico vemos a escala do controlador de 50 a 250 C. Porm a
banda de controle de 100 C, ou seja a banda proporcional deste
cont rolador de 50% (100 /200 C). Se a escala do instrument o fosse de
1000 C, a banda proporcional seria de 10% .
A banda proporcional deter mi na o quant o o element o acionador vai
agir para uma mudana na varivel controlada. Num controlador com
banda de 100%, se a varivel medida variar 10 C, a respost a seria a metade
da de outro cont rolador com banda de 50%. Ou seja quant o maior a banda
proporcional, menor a mudana no element o acionador para uma mesma
mudana na varivel medida.
A ao proporcional fornece um controle bem superior ao liga-
desliga, pois o cont rolador vai dosando a sada em confor mi dade com o
erro. Desta forma o overshoot menor, pois antes de chegar no valor pr-
fixado o controlador j vai diminuindo sua ao. Usamos o controlador
proporcional em processos com grande capacitncia, ou seja processos
cuja velocidade de reao seja pequena e tambm no tenham muita
inrcia. Nestes casos podemos diminuir a banda proporcional, o que torna
o cont role mais eficiente, com desvios menores do pont o de controle.
Um outro exempl o de controle proporcional um PWM onde
ajust amos o tempo de pulso de acordo com a diferena entre o sinal
medido e o desejado. Nestes casos o tempo total de ciclo constant e,
variando a relao ligado- desligado de forma proporcional diferena
entre o pont o de controle e o erro.
Controladores proporci onai s integrais ( PI ) so aqueles cuja sada
ou ao de cont role depende no s do erro ou diferena entre o medido e
o desejado, mas tambm da durao desta diferena. como se num
cont rolador proporcional adicionssemos um dispositivo de correo
automtica que verifica por quant o tempo fica o erro em determi nado
valor e ajust a a sada de acordo. Se o controlador sente que o valor medido
responde rpido ao de controle, ele ajust a sua sada para evitar um
overshoot muito grande. Com os controlador es PI podemos ajustar a faixa
60
de integrao, que expressa em repeties por minut o, tipicament e de 0 a
100. Esta faixa de integrao corresponde a quanto mais forte ser a
correo na sada se o processo no responder em x tempo. Ou seja, se
num controlador somente P a banda proporcional for de 5% e a taxa de
integrao for de 2 repeties por minuto, ao cabo de 1 minut o que foi
acionada a correo, se o processo no responder, a sada ser aument ada
em mais 5% da escala (mais uma banda proporcional). Ao cabo de dois
minut os a sada estar em 15% da escala, se o processo no tiver reagido.
Se o processo reage rpido ocorre o inverso, pois o controlador detecta a
correo na varivel medida e ajust a sua sada de acordo.
Os controlador es PI so usados em processos de respost a bem
rpida e onde ocorrem variaes bruscas de carga. Se usamos um PI num
processo muito lento, haver oscilaes e ciclagens na sada. Da mesma
forma se usamos um controlador P num processo rpido teremos o mesmo
efeito de um PI num processo lento.
J os controladores proporcionai s derivati vos PD so aqueles que
tem sua sada proporcional derivada ou seja taxa de respost a do
processo. A derivao mostra a relao entre a velocidade ou taxa de
mudana da varivel controlada e o acionament o do elemento final de
cont role. Assim o cont rolador age rapidament e a uma mudana brusca da
varivel medi da e age lentament e a uma mudana gradual, tent ando
mini mi zar sempre o erro, o que todos controlador es almejam.
O uso dos controlador es PD em processos em que a inrcia seja
menor que o tempo de reao ou em processos de mudanas muito
rpidas, quando uma antecipao da ao de controle causa um melhor
desempenho do processo. No entant o se o processo for extremament e
rpido e muito irregular e controlador PD no se adapt a bem.
Finalment e temos os controladores proporci onai s - integrais -
derivativos (PID). Hoje em dia quase todos os cont roladores indust riais
so do tipo PID, a no ser os bem simples que so liga- desliga. Com a
evoluo da eletrnica e principal ment e dos microprocessadores, ficou
fcil implement ar estas trs aes de controle em conjunt o. Um PID rene
as vantagens dos 3 tipos anteriores P, PI e PD, permitindo um ajust e mais
fcil a qualquer tipo de processo. A combinao da ao proporcional
integral (que leva em conta o tempo que o erro esta ativo) e derivativa
(que leva em cont a a taxa de variao do erro) assegura a melhor eficincia
do controle. Nos controladores modernos podemos ajust ar a banda
proporcional (P) e as aes integral (I) e derivativa (D) de modos a casar a
respost a do controlador com o processo.
A figura abaixo ilustra o modo de ao de um PID num controle de
temperat ura. Vemos nela quat ro zonas de ao diferent es. Na zona 1, com
a temperat ur a subindo, mas ainda no atingindo o valor desejado, o
cont role proporci onal aciona a sada para baixar a temperat ur a, pois a
mesma se encont ra j dentro da banda proporcional. Ao mesmo tempo a
61
ao derivativa, vendo que a temperat ur a j entrou na banda proporcional,
age para diminui r tambm a temperat ura. Porm a ao integral, notando
que ainda no se atingiu o valor desejado, mandar subir a temperat ura.
Assim a ao combinada dos trs tipos faz com que a temperat ura suba,
mas lentament e, evitando um overshooot muito grande.
Na zona 2 temos a temperat ura j acima do valor desejado e ainda
subindo. Nesta situao as 3 aes vo tent ar levar a temperat ur a para
baixo. J na zona 3 com a temper at ur a descendo, mas acima do valor
desejado, a ao derivativa tende a fazer aument ar a temperat ur a, pois a
taxa de variao para baixo, ao mesmo tempo que a ao integral ainda
manda baixar, por estar acima do valor desejado. Assim a temperat ur a
desce, mas lentament e para evitar sair fora da banda proporcional. Na
zona 4 coma temperat ura abaixo do desejado e descendo, todos os modos
de controle agem para levantar a temper at ur a.
Resumindo temos: sempre que a temperat ur a se aproximar do
pont o desejado, seja do lado inferior ou superior, o controle derivativo se
ope ao integral, num esforo para prevenir a ultrapassagem do valor
desejado.
Os fatores que devemos considerar na escolha de um controlador
so:
Sensibilidade - menor mudana na varivel medida capaz de
causar uma respost a do cont rolador. As variaes que no causam
mudana na sada so chamadas de zona morta.
Velocidade de respost a - o tempo exigido para que um sistema
de controle reaja a uma mudana no sinal de entrada. Esta
velocidade depende dos atrasos e inrcia do processo e do tempo
de converso e processament o dos sinais.
Condies ambientai s de operao - temperat ur as mximas e
mnimas, umidade, prova de exploso, etc.
Flexibilidade e adapt abilidade - capacidade do controlador se
ajustar aos diferent es processos.
Confiabilidade - determi nada pelo MTBF - tempo mdio entre
falhas do equipament o.
Manutenciabilidade - facilidade e capacidade de manut eno do
equipament o.
62
Entre os mais variados tipos de controladores existent es, vamos
destacar os mais utilizados nas indst rias:
Controladores de temperat ur a - permite controlar uma ou mais
temperat uras no processo. Este tipo de controlador recebe em sua entrada
um sinal procedent e de um sensor de temper at ur a e compara o valor da
temperat ura medi da pelo sensor com a desejada, que normal ment e
ajust ada em seu painel, ou ento recebida via interface de um
cont rolador cent ral. O sinal de erro entre o medido e o desejado vai
acionar um elemento que interferir no processo para levar a temperat ur a
ao valor desejado, seja aquecendo, resfriando, ventilando ou apenas
desligando o atuador pelo tempo necessrio.
Os sensores de temperat ur a mais comuns so os termopares , que
so adequados para temperat ur as de - 270 C at 1700 C, dependendo do
tipo de termopar. O tipo J para temper at ur as de - 200 a +1200 C, sendo
mais usado at 400 C, enquant o o tipo K adequado para temper at ur as
entre - 270 e +1370 C. Os termopares apresent am srios problemas de
no- linearidade, que so corrigidos hoje em dia por tabelas nas memri as
dos microcont r ol ador es. Basicamente um termopar compost o de dois
metais, juntos numa extremi dade, capazes de produzir um potencial
eltrico na outra extremidade, chamada de junta fria. Esta tenso muit o
pequena, da ordem de microvolt s por grau (45V/ C para o tipo J). Isto
exige amplificadores de alta impedncia e com muit o ganho para
amplificar os seus sinais, at termos tenses adequadas para comparar
com os valores desejados. Os termopares possuem erros apreciveis (da
ordem de 5 a 8C, para tipo J e de 20 a 50 C para tipo K) na medio da
temperat ura, porm so robust os, durveis e relativament e barat os. Todos
termopar es precisam de um circuito chamado de compensao de junt a
fria, que ajusta o valor dos milivolts gerados na ponta quente,
temperat ura ambiente real da junt a fria, pois o termopar gera uma tenso
termoelt rica proporcional diferena entre a junta fria e a quent e.
Outro sensor de temperat ura muito usado o termistor , ou seja um
resistor fabricado especialmente para ter sua resistncia variando
linearment e com a temperat ura. Os termist ores podem ser NTC
(coeficiente negativo de temperat ur a) ou PTC (coeficiente positivo de
temperat ura), ou seja sua resistncia pode diminuir (NTC) ou aument ar
(PTC) com a temperat ura. Eles so bem mais lineares que os termopar es,
porm sua faixa de ao muito mais restrita, sendo limitada em torno de
150 C. Um tipo especial de termistor chamado de bulbo de platina (RTD)
ou Pt- 100 , que um resist or de alta preciso, cuja resistncia de 100
Ohms a 25C. Ele muito linear e estvel, podendo ser utilizado de - 200
at +600 C. O nico problema seu custo elevado.
Atualment e existem muitos sensores de temper at ur a feitos com
semicondut or . O mais simples usar um transist or comum e aproveitar
que a queda na juno varia linearmente com a temper at ur a (20mv/ C).
63
Basta ligar o coletor em curto com a base e aliment - lo com uma
corrente constant e. Podemos comprar sensores semicondut or es fabricados
especial ment e para medir temperat uras, como o AD590 da Analog Devices,
que fornece 1mA/ C, ou ento o LM35 ou LM45 da National que do
10mV/ C. Estes CIs j so linearizados e estabilizados, tendo erros
mximos em torno de 1 a 4C. Estes sensores, sendo semicondut or es, so
limitados em temperat ur as de - 55 a + 125 C.
Controladores de velocidade ou rotao : Estes controladores
recebem o sinal de um transdut or chamado tacogerador ou gerador
tacomt rico, que gera um sinal CC ou CA, proporcional velocidade de
rotao de um motor, eixo ou pea. O sinal do tacogerador comparado
velocidade desejada e o sinal de erro atua no motor ajustando a rotao
para mais ou para menos, at eliminar o erro. O esquema de atuao no
motor varia confor me o tipo de motor usado. Para motores CA usamos os
chamados inversores que variam a freqncia e a tenso para cont rolar a
velocidade. Em mot ores CC basta variar a tenso de aliment ao. Em
motores de passo temos que dar mais ou menos pulsos.
Controladores de posio : recebem sinal de transdut ores de
posio, como potencimet r os ou pares de sincros, tipo Selsyns (sistema
sincro com transfor mador es que geram tenso proporcional ao seno do
ngulo do eixo) e atuam nos motores, normal ment e CC.
Controladores de vazo : recebem sinal de transdut or es de vazo
(flow meters) que geram um sinal eltrico proporcional vazo do liquido
ou gs em uma tubulao. Este tipo o usado nos modernos sistemas de
injeo eletrnica de combustvel dos automveis. Existem diferentes
verses para estes transdut or es, sendo as mais conhecidas a que usa a
presso diferencial como element o sensor primrio e a miniturbina que,
embuti da no tubo, gera um pulso por rotao, pois possui um im numa
das aletas, que ao passar por uma bobina na lateral, gera um pulso.
Controladores de presso : estes recebem um sinal eltrico
proporcional presso. Existem muitos sensores de presso j como CI,
com um pequeno tubo para captar o fluido cuja presso queremos
cont rolar. Este fluido age sobre uma membrana que se move e altera as
caractersticas de um cristal semicondut or, gerando um sinal eltrico
proporcional presso. O prprio CI j faz a linearizao da curva de
respost a do sensor. A Analog Devices uma das fabricantes deste tipo de
CI.
Existem ainda outros tipos menos comuns de controladores,
adapt ados para casos mais especficos de controle nas indst rias. Todos
seguem o mesmo princpio bsico de serem ligados a um sensor ou
transdut or que mede um parmet ro do processo, processarem o sinal
deste sensor e gerarem uma ao corretiva sobre o processo, visando
mant - lo dentro do especificado. Muitas vezes o especificado controlar
uma varivel, mas o controlador no age diretament e sobre ela, mas sim de
64
forma indireta, atuando sobre outra varivel, a qual alterar o processo e
assim controlar o parmet r o desejado. Um exemplo disto o cont role da
temperat ura num forno. O cont rol ador mede uma ou mais temperat ur as
no interior do forno e age no diretament e sobre a temperat ura, mas sobre
o element o de aqueciment o, seja ele uma resistncia ou uma vlvula que
liberar vapor ou outro meio qualquer de aqueci ment o. Noutro processo o
cont rolador para aument ar a temperat ur a simplesment e reduz a circulao
de ar, diminuindo a rotao do ventilador ou fechando as compor t as da
ventilao. Cada processo tem uma maneira de ser automati zado e
cont rolado. Os controladores eletrnicos podem agir sobre praticamente
todos os processos, ainda mais hoje em dia, com os controladores
programveis (CLPs), que possuem maior flexibilidade e adapt abilidade.
SMD
A tecnologia SMD (surface mount ed devices = disposi tivos mont ados
em superfcie) algo recente, do final dos anos 80, vindo na esteira da
miniat uri zao crescente da eletrnica. Se formos olhar um component e
de tecnologia through hole = atravs dos furos, ou seja de mont agem
convencional, onde os terminais passam por um furo na placa, e abrirmos
este component e, removendo seu encapsulament o, encont rar emos o chip
de silcio no centro, ocupando um espao em torno de 10 a 20% da rea
total. O restante do espao em torno do chip usado apenas para permitir
ligar os terminais internos do chip ao mundo exterior, via os terminais
metlicos do encapsul ament o. Na tecnologia convencional, o espao
padro entre pinos de 0,1 pol = 2,54 mm. Fica difcil reduzir mais este
espao, pois ao soldar, se os terminais estiverem mais prximos, o risco de
ocorrerem curto- circuit os entre terminais grande. Alm disto o prprio
fato de termos que furar as placas para passar os terminais obriga a um
certo espaament o. Quanto menor for o furo de passagem, mais difcil fica
furar, mais brocas se quebram e mais caro vai ficando o processo.
A evoluo no apenas dos chips, contendo cada vez mais
component es e funes, mas segurament e tambm da tecnologia de
processos de fabricao, permitiram o desenvolviment o da tecnol ogia de
mont agem em superfcie (SMD). Os component es SMD so to reduzi dos
que fica difcil manipul- los com as mos. A mont agem das placas com
SMDs feita quase sempre com mquinas insersoras de component es, o
que complica a mont agem de prot ti pos. claro que podemos mont ar
protti pos usando pinas e lupas, mas o processo lento e complicado.
Exige muita ateno e pacincia.
A mont agem dos SMDs feita, como o prprio nome diz, na
superfcie da placa. Os terminais no atravessam de um lado a outro da
placa. Desta forma podemos aproveitar e montar component es dos dois
lados da placa, saindo do convencional lado da solda e lado dos
65
component es. Aliado a maior miniat uri zao dos component es, o que
obtemos conseguir por muito mais funes em muito menos espao. Sem
o SMD no teramos hoje os telefones celulares, nem os comput ador es de
mo. As prprias placas- me dos comput ador es de mesa e todas as placas
dos adapt adores, seja de vdeo, memrias, etc , se no so total ment e SMD,
com certeza contm muitos component es SMD.
O processo de fabricao para tecnologia SMD difere em vrios
aspect os, a comear pelo projeto. Devido geometria das linhas e trilhas
muit o prxi mas e densas, obrigatrio o uso de ferrament as CAD para
gerar o layout das placas. Estas placas geral mente so multicamadas, o que
mais uma vez obriga o uso de CAD. As poucas placas que no so
multicamadas se aplicam a CIs que perfazem uma funo completa,
necessitando apenas entradas de aliment ao e de sinal , alm de sada de
sinal. Um exemplo um rdio FM num chip. Hoje j temos num chip alm
de rdios, relgios, cmaras de vdeo, receptores de sinais de satlite GPS e
centenas de outros produt os que at certo tempo atrs tinham que ser
mont ados a partir de vrios component es integrados e discret os.
As placas para SMD so fabricadas com uma camada de solda
(estanho- chumbo) bem mais espessa que para mont agem convencional. O
banho de solda, aplicado por galvanizao ou eletro- deposio na
fabricao da placa, tem que garantir uma quanti dade suficiente de solda
para efetivament e soldar os component es no processo de montagem
posterior. Na mont agem, os component es so colocados na placa, com j
dissemos acima, via mquinas insersor as ou posicionador as (pick and
place machines). Esta mqui nas so programadas e colocam os
component es com alta preciso. claro que as tolerncias so mni mas em
todo o conjunt o, desde a placa at o cabeote posicionador da mquina.
A seqncia do processo :
pegar a placa nua;
aplicar pingos de cola ou pasta de solda nos pont os onde ter
component es;
posicionar component es na placa;
aquecer a placa curando primeiro a cola e depois fundindo a solda
que j estava na placa;
limpar a placa, removendo resduos do fluxo;
aplicar verniz protet or.
A aplicao de cola ou da pasta de solda via uma mscara, tipo
serigrfica, que aplica o produt o em todos os pont os necessrios numa s
passada. Quando a placa for soldada por equipament o convencional (solda
a onda), aplicado cola para segurar os component es no lugar. Este
processo se aplica em placas mistas SMD e convencional juntas. Nas placas
SMD puras se aplica a pasta de solda , que nada mais do que um fluxo
impregnado com grnulos de solda. Alguns solventes so adicionados
pasta para garantir caractersticas timas de aplicao dela na placa. O
66
posicionament o dos component es via mquina. Quando necessri o
mont ar muitos component es diferent es na placa, so usadas mquinas
com mais de uma estao de pick and place. Neste caso as placas so
aquecidas em cada estao apenas para curar a cola, o que significa uma
temperat ura bem menor que a necessria para fundir a solda, e a so
repassadas para a prxima estao.
Devemos consi derar que a solda e/ ou cola so os nicos element os a
fixar mecnica e eletricament e os component es SMD na placa. Como o
pont o de contato do component e com a solda (chamado de pegada =
footpri nt) bem pequeno, devemos garantir uma tima soldagem, com boa
molhagem, um filete de solda bem definido e evitar excessos de solda. A
tcnica de soldagem mais usada at hoje em SMD a solda por refuso
(reflow), obtida por diferent es tecnologias, como a conduo trmica, por
infravermelho, por raios laser e por fase vapor. Destas, o uso da refuso
por fase vapor tem se mostrado mais confivel e por isto a mais usada.
Nesta tcnica se usa o princpio do calor latente de condensao de um
vapor para transferir calor de um lquido em ebulio para a placa. Ao
condensar este vapor libera seu calor latente para fundir a solda, tant o a d
aplaca como a da pasta de solda. A placa imersa num lquido em
ebulio, recebendo- o j em fase vapor. O calor latente se transfere de
maneira rpida e eficiente para a placa, aquecendo- a uniformement e. Alm
disto o processo bastant e limpo pois somente vapores destilados tocam
na placa e component es. Assim podemos soldar os dois lados da placa
numa s passada.
A qualidade final afetada tanto pela soldagem como pelo processo
de limpeza, no qual removemos os resduos do fluxo. Como j vimos o
fluxo de solda remove as oxidaes superficiais e faz a limpeza
preparat ria para a soldagem. No entant o os resduos desta limpeza tem
que ser eliminados tambm, sob pena de causarem corroso. A limpeza
das placas historicament e vinha sendo feita com freon (CFC), mas com a
quest o da camada de oznio, outra tcnicas foram desenvolvidas. A mais
usada hoje da limpeza com gua desmi nerali zada. Sempre que voc for
fazer uma manut eno em uma placa, seja SMD ou no, lembre- se de
limpar o resduo do fluxo. Pode usar lcool comum, ou de preferncia
lcool isoproplico.
Os tipos de component es SMD que encontramos no mercado global
vo desde os discret os resistores, capacitores e at pequenos indut ores, at
integrados VLSI tipo processadores Pentium, K6, etc. Veremos a seguir
alguns tipos de encapsulament o e de terminais usados nos SMDs .
Component es discretos normal ment e so tipo pastilha (chip), com os
terminais nas extremi dades, como most ra o desenho abaixo. Os diodos de
pequena potncia tambm podem vir destra forma. J os transistores e CIs
usam encapsulament os chamados de SOT (small outline transist or) ou
SOIC (small outline IC) ou ainda flatpacks, PLCC (plastic leaded chip
67
carrier) ou ainda os mais recentes SMD e SC70, com tamanhos de 1 x
1mm e 2 x 1 mm respectivament e. Estes encapsulament os podem ter
terminais do tipo asa de gaivota (gull wing) ou tipo J, como mostra a figura
abaixo.
Os terminais tipo J permitem melhor aproveitament o de espao,
porm o acesso aos terminais para teste complicado e a inspeo da
solda tambm fica compromet i da. J os asa de gaivota so fceis de test ar
e se adapt am melhor s mquinas insersoras, porm ocupam espao
precioso na placa.
Diodos e resistores SMD, sem terminais, em format o MELF
(metallized electrode face = face do eletrodo met ali zada) supor t am at 1W
no tamanho 37x37 mils (0,87x0,87 mm) desde que em temperat ura
ambient e de 25C. Existem at diodos de potncia de 2,5W em SMD,
usando um mini TO- 220, chamado na Motorola de DPAK.
Apresent amos abaixo uma ilust rao em tamanho real do
encapsulament os SMD da National.
68
ASICs
A tecnologia SMD evoluiu a partir dos hbridos de filme espesso
(thick film). Esta tcnica ainda usada at hoje, consistindo em mont ar
sobre uma base cermica os chips sem encapsul ament o, associados a
component es discretos, tambm reduzi dos a seu ncleo essencial. Os
resistores, por exemplo, so feitos depositando camadas sucessivas de
carbono e/ou prata nos pont os adequados, formando o valor desejado de
resistncia direto sobre a placa.
Com a tcnica dos hbridos de filme espesso possvel reduzi r em
muit o o tamanho dos circuitos. Esta tcnica apropri ada para quanti dades
mdias de produt os (lotes de mil a dez mil peas). Para quantidades
maiores pode- se partir direto para os ASICs (application specific IC = CI
para aplicao especfica).
Os ASICs nada mais so do que CI fabricados sob medida e sob
encomenda de um fabricant e especfico. Por exempl o, posso projet ar uma
mqui na de lavar prat os, com uma seqncia de lavagens e acionament os
de bocais diferenciados dos existent es no mercado. Para proteger meu
projeto, evitando cpias, posso projetar um circuito com microcont rolador
e demais perifricos, e mandar fabricar numa fbrica de chips ,tipo
69
National, Texas, ON, Fairchild, Phillips, etc um integrado que contenha meu
cont rolador, PROM j gravada, e demais circuitos de apoio e interface. Este
CI vai ser meu e s meu, inclusive com meu prprio cdigo. Ningum mais
poder ter um igual, a menos que projete e mande fazer noutr o lugar,
correndo o risco de ser processado por cpia ilegal.
PRTICA PESQUISA COMPONENTES
Procure o component e abaixo nos manuais de fabricante e explique
como ele funciona, a partir dos dados tcnicos obtidos. OBS: Cada aluno
procurar um component e.
1) Comparador com offset mximo de 30mV.
2) Comparador duplo com tempo de respost a < 100ns.
3) Operacional quadr upl o com offset <1mV.
4) Operacional duplo com corrente de entrada < 1nA.
5) Amplificador de udio, 12V, 1,5W em 4.
6) Conversor A/D, 12 bits, I/O paralela, tempo converso < 707ns.
7) Ponte H, 3 A, Vent mxima 40V, Temperat ura - 20 a +80 C.
8) Regulador de tenso positiva, 12V, carga 2,8 A.
9) Sensor de temperat ura, preciso 1,5C , na faixa de - 50 a +150 C.
10) Operacional com slew rate >3000V/ s, low power, banda
passant e 100MHz.
11) Operacional alimentado por +24V, A
Vol
>1000, banda passant e >
2MHz.
APNDICE - CIRCUITOS DE CONTROLADORES
Apresent amos a seguir alguns circuitos de controlador es e um
exempl o de ponte de Wheatst one. A pont e de Wheatstone muito utilizada
em cont rol adores, em experincias cientficas e eletromedicina, para
amplificar os sinais dos sensores e transdut ores. Seu funcionament o
baseado no equilbrio entre os dois braos (ou ramos) da ponte, quando o
circuit o esta na condio estvel ou de calibrao. Ela muito eficiente
para detectar pequenas variaes num dos element os que a compe.
Normal ment e as pont es de Wheatst one so constr u das com resistores
iguais, o que facilita os clculos, mas isto no uma exigncia. Vejamos o
seu funcionament o, ilustrado pela figura abaixo:
70
Notem que temos 4 resist ores R1 a R4, mais um resistor h em srie
com R4. Este resistor h represent a a variao no valor de R4, em funo da
mudana num parmet r o externo ( temper at ur a, presso, fora, etc..). Logo
R4 o nosso sensor ou transdut or, que transfor ma esta mudana de
parmet r o externo em variao da resistncia. Na condio de equilbrio, a
tenso de alimentao fica dividida igualmente entre os dois braos da
pont e, assim E2 = E3 = E
1
/2. O divisor de tenso nos d:
E2 = E
1
= E
1
/ 2 e E3 = E
1
= E
1
/ 2
Mas sendo os resistores iguais, podemos escrever:
E3 = E
1
Assim temos a sada : Eo = E3 - E2 = - E
1
/ 2
Eo = E1h = E1 d ,onde d = R/R
4R + 2h 4 1+d
Esta equao vlida se - 0,1< h > 0,1 (ou d << 1 ) , ou seja se a variao
do valor do resistor for menor que 10% do valor total dele. Isto nos
garante uma sada Eo que varia linearment e com a variao de R4. Se no
for este o caso, temos que usar tcnicas de linearizao da ponte e
frmulas mais complexas, mas a teoria bsica a mesma. Um exemplo
um termist or de valor 25K a 25C, que varia aproximadament e 20/ C. Seu
valor d = 20/ 25000 ou 0,0008, que <<1.
A tenso de sada da ponte de Wheatst one, como uma diferena entre os
dois braos da ponte, se prest a bem para ser aplicada num amplificador
operacional diferencial ou num operacional de instrument ao, que
bast ant e estvel. Tambm muit o estvel tem que ser a aliment ao da
pont e, pois as tenses de sada dependem diretament e de dela.
71
Muitas vezes usamos um dos resistores, no brao da ponte opost o ao do
sensor, como resist or varivel , para zerar a sada no pont o desejado.
Tambm se usa este mtodo para saber o valor de uma resistncia
desconhecida, ajustando o valor do resist or varivel at a sada de tenso
ser zero. Neste pont o se desliga o circuito e se v o valor do resistor
varivel, que igual ao de valor desconhecido. Este resistor varivel, nestes
casos, normal ment e uma dcada resistiva, cujo valor pode ser lido do
seu painel.
Um exemplo de aplicao da ponte de Wheatst one num controle de
temperat ura, usando termistor most rado abaixo:
O R4 o termist or, colocado dent ro da est ufa. R3 o potencimet ro de
ajust e da temperat ur a desejada. R6 serve para ajuste da sensibilidade do
circuit o, evitando o liga- desliga a toda hora. Este circuito est simplificado
na parte de potncia, sendo mostrado aqui um darlington acionando direto
a resistncia de aqueciment o da estufa. Para pequenas potncias isto
funciona, mas para potncias maiores precisamos de mais estgios a
transist or ou a tirist ores.
Outro exemplo de circuito medidor, que pode ser a base de um
cont rolador most rado abaixo. Lembre- se que primeiro preciso medir a
varivel, para depois comparar com o valor desejado e ento agir no
processo. O circuito abaixo mostra como medir o pH de um processo e
acionar um DPM (medidor digital de painel). A mesma sada para o DPM
pode ser usada na entrada de um comparador e comparada a um valor de
pH desejado, iniciando a ao corretiva.
72
A seguir ilustramos circuitos tpicos para controles P,PI e PID. O
primeiro o proporcional (P). O uso do potencimet ro na realiment ao
opcional.
73
Agora most ramos o circuit o tpico PI (proporcional - integral)
Finalment e mostramos o circuito PD e a realiment ao PID, que
soment e o que muda de um tipo para outro.
74
Você também pode gostar
- Aviso de Abertura Da CP 025 2019 Publicado No DOU de 17.10.2019 Secao 3 Pag 110.Documento1 páginaAviso de Abertura Da CP 025 2019 Publicado No DOU de 17.10.2019 Secao 3 Pag 110.Carlos Gomes FontinelleAinda não há avaliações
- Apostila Sobre Forno de MicroondasDocumento32 páginasApostila Sobre Forno de MicroondasCarlos Gomes Fontinelle100% (2)
- Telefonia CelularDocumento197 páginasTelefonia CelularCarlos Gomes FontinelleAinda não há avaliações
- Eletrônica de PotênciaDocumento57 páginasEletrônica de PotênciaBruno Jonko DuarteAinda não há avaliações
- Como testar IGBTs e MOSFETs com multímetroDocumento7 páginasComo testar IGBTs e MOSFETs com multímetroJúnior CremonezAinda não há avaliações
- Capitulo1 - Com Moveis Tecnologo 2009Documento27 páginasCapitulo1 - Com Moveis Tecnologo 2009Danilo AlvesAinda não há avaliações
- 129647-Apostila Eletronica Potencia IFRN Zona NorteDocumento42 páginas129647-Apostila Eletronica Potencia IFRN Zona Nortejhonny639100% (1)
- 8 FchavDocumento8 páginas8 FchavCarlos Gomes FontinelleAinda não há avaliações
- Termografia na inspeção preditiva elétricaDocumento7 páginasTermografia na inspeção preditiva elétricaCarlos Gomes FontinelleAinda não há avaliações
- Fontes ChaveadasDocumento27 páginasFontes ChaveadasCarlos Gomes FontinelleAinda não há avaliações
- Como Funcionam As Fontes ChaveadasDocumento8 páginasComo Funcionam As Fontes ChaveadasReinaldo Oliveira100% (2)
- Links Úteis PDFDocumento1 páginaLinks Úteis PDFCarlos Gomes FontinelleAinda não há avaliações
- Fontes Chaveadas: Conversores Estáticos CA-CC com Regulação por ChaveamentoDocumento11 páginasFontes Chaveadas: Conversores Estáticos CA-CC com Regulação por ChaveamentoJackson WilliansAinda não há avaliações
- 02 - Livro Elementos de Eletronica DigitalDocumento472 páginas02 - Livro Elementos de Eletronica DigitalCarlos Gomes FontinelleAinda não há avaliações
- 8 FchavDocumento8 páginas8 FchavCarlos Gomes FontinelleAinda não há avaliações
- A Língua de Sinais Constituindo o Surdo Como SujeitoDocumento15 páginasA Língua de Sinais Constituindo o Surdo Como SujeitoMauricio Damasceno SouzaAinda não há avaliações
- Analise Ecomomica Energia Fotovoltalica PDFDocumento98 páginasAnalise Ecomomica Energia Fotovoltalica PDFNelson AraújoAinda não há avaliações
- 1511 2246 1 SM PDFDocumento11 páginas1511 2246 1 SM PDFCarlos Gomes FontinelleAinda não há avaliações
- Sistemas Elétricos de PotênciaDocumento8 páginasSistemas Elétricos de PotênciaCarlos Gomes FontinelleAinda não há avaliações
- 2976 5567 1 PB PDFDocumento10 páginas2976 5567 1 PB PDFCarlos Gomes FontinelleAinda não há avaliações
- NR 16 ComentadaDocumento20 páginasNR 16 ComentadaLuciana Lyra de AguiarAinda não há avaliações
- Multisim 10 Tutorial PDFDocumento4 páginasMultisim 10 Tutorial PDFCarlos Gomes FontinelleAinda não há avaliações
- 205 412 1 PB PDFDocumento12 páginas205 412 1 PB PDFCarlos Gomes FontinelleAinda não há avaliações
- Atvidade 1 - Libras - Carlos Fontinelle PDFDocumento3 páginasAtvidade 1 - Libras - Carlos Fontinelle PDFCarlos Gomes FontinelleAinda não há avaliações
- MultiSim - Do EWB À National Instruments - NE0000 PDFDocumento5 páginasMultiSim - Do EWB À National Instruments - NE0000 PDFCarlos Gomes FontinelleAinda não há avaliações
- Apostila - Software Educacional e Objetos de Aprendizagem PDFDocumento31 páginasApostila - Software Educacional e Objetos de Aprendizagem PDFCarlos Gomes FontinelleAinda não há avaliações
- Atividade 3 (M2) - Desafio Individual PDFDocumento3 páginasAtividade 3 (M2) - Desafio Individual PDFCarlos Gomes FontinelleAinda não há avaliações
- Resultados OraisDocumento21 páginasResultados OraisCarlos Gomes FontinelleAinda não há avaliações
- 2986 14152 1 PBDocumento7 páginas2986 14152 1 PBCarlos Gomes FontinelleAinda não há avaliações
- Lenovo G450-G550 User Guide V2.0 - Print (Portuguese)Documento106 páginasLenovo G450-G550 User Guide V2.0 - Print (Portuguese)Fabrício Alvernaz0% (1)
- Listado Precios Tche LocoDocumento420 páginasListado Precios Tche LocoChristian ViverosAinda não há avaliações
- Técnicas de Deteção de Avarias em ComputadoresDocumento42 páginasTécnicas de Deteção de Avarias em ComputadoresElisabete100% (1)
- 04 MultiterminaisDocumento44 páginas04 MultiterminaissantostecservAinda não há avaliações
- Manual HDLDocumento40 páginasManual HDLEraldo JuniorAinda não há avaliações
- Amplificadores em CascataDocumento24 páginasAmplificadores em CascataMatheus Padilha100% (1)
- Pseudo Instrução e OpcodeDocumento15 páginasPseudo Instrução e OpcodeWellington Morais BarrosAinda não há avaliações
- Formação CeragonDocumento176 páginasFormação CeragonRogerioSantos100% (1)
- LivroDocumento12 páginasLivroMateus SantosAinda não há avaliações
- Sistemas MicroprocessadosDocumento7 páginasSistemas MicroprocessadosItalo SantosAinda não há avaliações
- Notas de Aula 07Documento59 páginasNotas de Aula 07Pedro VaraAinda não há avaliações
- Soluções Bematech em Geral - JULHO 15Documento8 páginasSoluções Bematech em Geral - JULHO 15Peter Lucas EcheverriAinda não há avaliações
- Eaii (02 00) 2018Documento94 páginasEaii (02 00) 2018Miguel MateusAinda não há avaliações
- Configurar Rede Industrial Profibus Entre CLP S7-1200 e s7-300 - TIA PORTAL1Documento7 páginasConfigurar Rede Industrial Profibus Entre CLP S7-1200 e s7-300 - TIA PORTAL1Leo Cruz100% (1)