Escolar Documentos
Profissional Documentos
Cultura Documentos
Apostila
Enviado por
Anonymous 2IvdvpFTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Apostila
Enviado por
Anonymous 2IvdvpFDireitos autorais:
Formatos disponíveis
Sistemas de Acionamento Estatico de Maquina
Eletrica
Cursino Brand ao Jacobina
Campina Grande, PB, Brasil
c Cursino Brand ao Jacobina, Junho de 2005
Sistemas de Acionamento Estatico de Maquina
Eletrica
Cursino Brand ao Jacobina
Junho de 2005
Campina Grande, PB, Brasil, Junho de 2005
Conte udo
1 Introdu cao geral 4
1.1 Introdu cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Acionamento com maquina de corrente contnua 6
2.1 Introdu cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Princpio de funcionamento da m aquina CC . . . . . . . . . . . . . . . . . 6
2.3 Modelo da m aquina CC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.1 Representa cao no tempo do modelo din amico . . . . . . . . . . . . 9
2.3.2 Modelo de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.3 Funcao de transferencia . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.4 Modelo de regime permanente . . . . . . . . . . . . . . . . . . . . . 11
2.4 Analise no tempo e na frequencia da m aquina CC . . . . . . . . . . . . . . 11
2.4.1 Partida do motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4.2 Resposta em frequencia . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 Controle de velocidade do motor CC . . . . . . . . . . . . . . . . . . . . . 14
2.5.1 Controlador de velocidade com a cao direta na tens ao . . . . . . . . 15
2.5.2 Controle em cascata . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 Fonte de tens ao de alimenta cao . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Modelo da maquina de corrente alternada 27
3.1 Introdu cao geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Equa coes gerais das m aquinas trif asicas . . . . . . . . . . . . . . . . . . . . 27
3.2.1 Conven coes, hipoteses e nota coes . . . . . . . . . . . . . . . . . . . 27
3.2.2 Express oes dos uxos, tens oes, conjugado e potencia . . . . . . . . . 28
3.3 Representa cao odq da m aquina trif asica . . . . . . . . . . . . . . . . . . . . 31
3.3.1 Deni cao da transforma cao odq . . . . . . . . . . . . . . . . . . . . 31
3.3.2 Express oes dos uxos, tens oes e conjugado em odq . . . . . . . . . . 32
3.3.3 Interpreta cao fsica . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.4 Representa cao bif asica dq da m aquina ativa . . . . . . . . . . . . . 36
3.3.5 Escolha da posicao ou referencial para os eixos dq . . . . . . . . . . 37
3.4 Representa c ao complexa ou vetorial dq . . . . . . . . . . . . . . . . . . . . 37
3.5 Aplica cao ` as m aquinas assncrona e sncrona . . . . . . . . . . . . . . . . . 39
3.5.1 M aquina assncrona (indu cao) . . . . . . . . . . . . . . . . . . . . . 39
3.5.2 M aquina Sncrona . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1
CONTE
UDO 2
4 Introdu cao ao acionamento com maquina assncrona 44
4.1 Introdu cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.2 Caractersticas de funcionamento . . . . . . . . . . . . . . . . . . . . . . . 44
4.3 Modelos din amicos da m aquina assncrona . . . . . . . . . . . . . . . . . . 46
4.3.1 Modelos din amicos contnuos . . . . . . . . . . . . . . . . . . . . . 46
4.3.2 Modelos din amicos discretos . . . . . . . . . . . . . . . . . . . . . . 51
4.3.3 Modelo mec anica de movimento . . . . . . . . . . . . . . . . . . . . 52
4.4 Fonte de alimenta cao est atica . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.5 Sistema de aquisi cao e controle . . . . . . . . . . . . . . . . . . . . . . . . 53
5 Controle de uxo e conjugado da maquina assncrona 54
5.1 Introdu cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.2 Estrategias de controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.3 Controle por escorregamento . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.3.1 Controle por escorregamento com o uxo rot orico . . . . . . . . . . 56
5.3.2 Controle por escorregamento com uxo estat orico . . . . . . . . . . 58
5.4 Controle em quadratura . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.4.1 Controle em quadratura com o uxo rot orico . . . . . . . . . . . . . 61
5.4.2 Controle em quadratura com o uxo estat orico . . . . . . . . . . . . 63
5.5 Controle de corrente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.6 Projeto dos controladores . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.7 Estima cao do uxo magnetico da m aquina . . . . . . . . . . . . . . . . . . 66
5.8 Complexidade de implementa cao . . . . . . . . . . . . . . . . . . . . . . . 66
5.9 Resultados de simula cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.10 Resultados experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6 Controle de corrente da maquina assncrona 73
6.1 Introdu cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.2 Modelo din amico para o controle de corrente . . . . . . . . . . . . . . . . . 73
6.3 Controle de corrente com histerese . . . . . . . . . . . . . . . . . . . . . . 74
6.4 Controle de corrente com histerese independente . . . . . . . . . . . . . . . 74
6.5 Controle com histerese vetorial . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.6 Controladores de corrente linear . . . . . . . . . . . . . . . . . . . . . . . . 77
6.7 Controladores para sistemas monof asicas ou trif asicos desbalanceados . . . 79
6.8 Estudo dos controladores de corrente . . . . . . . . . . . . . . . . . . . . . 81
7 Controle do inversor de tensao com modula cao por largura de pulso 86
7.1 Introdu cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
7.2 Princpios do comando PWM . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.3 Modula cao vetorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
7.4 Modula cao escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7.5 Rela cao entre as modula coes vetorial e escalar . . . . . . . . . . . . . . . . 94
CONTE
UDO 3
8 T opicos especiais 97
8.1 Introdu cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
8.2 Estima cao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
8.3 Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
8.4 Deteccao e compensa cao de falhas . . . . . . . . . . . . . . . . . . . . . . . 98
8.5 Sistemas de acionamento com n umero reduzido de componentes . . . . . . 99
Captulo 1
Introdu cao geral
1.1 Introdu cao
A m aquina de corrente contnua (CC) apresenta caractersticas din amicas e de opera cao
bastante favor aveis para a realiza cao de acionamentos eletricos ` a velocidade vari avel. En-
tretando, devido algumas limita coes construtivas, principalmente o comutador de corrente
mecanico, ela vem sendo substituda pelas m aquinas de corrente alternada (CA), que dis-
pensam esse tipo de comutador por terem sistemas de alimenta cao est aticos. De qualquer
forma, existe um grande n umero destas m aquinas j a em opera cao e portanto e necessario
estud a-las. Tambem, em funcao de ser um processo fsico de facil compreensao, modelo
bastante simples e de forte apelo intuitivo, a m aquina CC e muito importante para o en-
tendimento dos sistemas de acionamentos com as m aquinas CA, cujos modelos sao muito
mais complexos.
A m aquina assncrona e uma m aquina de corrente alternada que apresenta carac-
tersticas bastante apreciadas para a realiza cao de acionamentos est aticos a velocidade
vari avel: robustez, simplicidade de constru cao e baixo pre co comparativo com as de-
mais m aquinas. Entretanto, sua an alise e complexa pois requer o estudo de um sis-
tema multivariavel e n ao linear. Os primeiros esquemas de acionamentos com m aquina
assncrona eram do tipo escalar e baseados em modelos de regime permanente, tal como
o Volts/Hertz, apresentando fraco desempenho dinamico. No intuito de desenvolver sis-
temas de acionamento de alto desempenho, tem sido investigadas estrategias de controle
que assegurem o desacoplamento entre o controle do uxo e do conjugado. Explorando
convenientemente o modelo da m aquina, e possvel obter este desacoplamento utilizando
abordagens ditas vetoriais. Por exemplo, controlando o uxo rot orico da m aquina, pela
componente da corrente estatorica em fase com o uxo, e o conjugado eletromagnetico
por meio da componente da corrente estat orica ortogonal ou em quadratura com o uxo,
denominado controle por orientacao pelo campo. Neste texto os sistemas de acionamento
com m aquina assncrona s ao apresentados baseando-se numa classi cao generica para as
estrategias de controle. Na classica cao apresentada aqui, as estrategias de controle sao
agrupadas em duas categorias denominadas: controle por escorregamento e controle em
quadratura. A formula cao e a classica cao adotadas s ao sucientemente genericas e in-
cluem tanto as estrategias classicas quanto as estrategias modernas do tipo vetorial. As
estrategias de controle apresentadas nesta classica cao s ao estudadas e comparadas com
4
Captulo 1. Introdu cao geral 5
o controle por orienta cao pelo campo.
Nas estrategias de controle vetorial, particularmente aquelas em que o uxo rot orico e
controlado, o controle das correntes estatoricas e de import ancia fundamental. Em geral,
os controladores de corrente s ao baseados num modelo din amico invariante de primeira
ordem (siso) relacionando a corrente estat orica com a tens ao estat orica e uma vari avel
de perturba cao.
A alimentacao da m aquina em tensao e normalmente realizada comandando o inver-
sor por modula cao de largura de pulso (PWM). A alimenta cao da m aquina por tensao
PWM introduz harm onicos na corrente e no conjugado e perdas no conversor est atico
e na m aquina. Estas distor coes harm onicas e as perdas dependem do metodo de mod-
ula cao empregado. Neste texto s ao apresentadas as tecnicas de PWM digitais mais usuais,
classicadas em modula cao escalar e vetorial, e feita a rela cao entre elas.
Este texto e dividido em sete captulos, denominados com se segue:
Captulo 1: Introdu cao geral
Captulo 2: Acionamento com m aquina de corrente contnua
Captulo 3: Modelo da m aquina de corrente alternada
Captulo 4: Introdu cao ao acionamento com m aquina assncrona
Captulo 5: Controle de uxo e conjugado da m aquina assncrona
Captulo 6: Controle de corrente da m aquina assncrona
Captulo 7: Controle do inversor de tens ao com modula cao por largura de pulso
Captulo 8: T opicos especiais
Os sistemas de acionamento com m aquina de corrente contnua sao tratados no Captulo
2, enquanto os sistemas de acionamento com m aquina assncrona s ao tratados nos Captulos
3 a 7. No Captulo 8 s ao apresentadas t opicos adicionais relativos a sistemas de aciona-
mento de alto desempenho.
Captulo 2
Acionamento com maquina de
corrente contnua
2.1 Introdu cao
A m aquina de corrente contnua (CC) apresenta caractersticas din amicas e de opera cao
bastante favor aveis para a realiza cao de acionamentos eletricos ` a velocidade vari avel. En-
tretando, devido algumas limita coes construtivas, principalmente o comutador mec anico
de corrente, ela vem sendo substituda pelas m aquinas de corrente alternada (CA), que dis-
pensam esse tipo de comutador por terem sistemas de alimenta cao est atico. De qualquer
forma, existe um grande n umero destas m aquinas em opera cao e portanto e necessario
estud a-las. Tambem, em funcao de ser um processo fsico de facil compreensao, modelo
bastante simples e de forte apelo intuitivo, a m aquina CC e muito importante para o en-
tendimento dos sistemas de acionamentos com as m aquinas CA, cujos modelos sao muito
mais complexos.
O acionamento est atico com m aquina de corrente contnua e constitudo por uma
m aquina CC, uma fonte de tens ao est atica de alimentacao controlada, sistema de controle
e medicao. Neste captulo, ser ao apresentados o princpio de funcionamento e o modelo
dinamico do motor CC, o sistema de controle e a fonte de alimentacao.
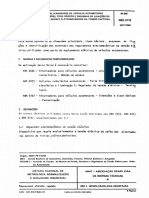
2.2 Princpio de funcionamento da maquina CC
A maquina de corrente contnua e constituda por dois circuitos magneticos principais (cf.
Fig. 2.1):
i ) Um circuito magnetico estacion ario (estator) de excita cao magnetica, dito de campo
ou excita cao, alimentado por uma fonte de tens ao contnua de potencia despresvel.
ii) Um circuito magnetico rotativo (rotor), dito de armadura, alimentado por uma
fonte de tensao contnua, correspondente ao estagio de potencia principal.
A bobina de campo, percorrida por uma corrente i
e
, cria um uxo
e
= l
e
i
e
, no sentido
indicado na Fig. 2.1. A bobina de armadura tambem cria um uxo unidirecional
a
= l
a
i
a
,
mesmo com a rota cao do rotor. Isto e decorrente da acao do comutador mec anico que
comuta as correntes entre as espiras da bobina mantendo o eixo m agnetico sempre na
mesma direcao. Esta opera cao pode ser imaginada como se o rotor fosse composto de
6
Captulo 2. Acionamento com m aquina de corrente contnua 7
a
e
i
e
v
e
v
a
i
a
c
e
cm
r
carga
c
a
+
_
+
_
estator
rotor
Figura 2.1: Motor de corrente contnua.
v arias bobinas girantes e, a cada instante, apenas a bobina que se encontra na posi cao
vertical fosse percorrida pela corrente i
a
criando o uxo
a
.
Observe que os uxos
e
e
a
so dependem das suas pr oprias correntes. Isto se deve a
uma caracterstica das maquinas eletricas onde o valor do uxo, a partir do eixo magnetico
da bobina, segue uma distribui cao senoidal. Assim, por exemplo, o uxo a um angulo
da bobina de campo e dado por
e
() = k
e
i
e
cos(), onde k
e
e uma constante. Esta
formula cao tambem e valida para a bobina de armadura. Como as bobinas de campo e
de armadura est ao a /2 rads (i.e., = /2) elas n ao possuem uxo m utuo.
Apesar do uxo da bobina de campo que chega na bobina de armadura na sua posi cao
vertical ser nulo, suas espiras est ao girando no campo
e
e portanto elas veem um campo
vari avel
e
(t) = k
e
e
cos() (onde k
e
e uma constante de acoplamento), portanto uma
tensao e
a
e induzida nestas bobinas devido a rota cao (for ca contra-eletromotriz de rota cao,
fcem) que pode ser calculada pela lei de Faraday ou Lenz. A fcem e
a
e dada por
e
a
=
d
e
(t)
dt
=/2
= k
e
e
sen()
d
dt
=/2
= k
e
r
(2.1)
onde
r
= d/dt e a velocidade do rotor.
O modelo eletrico para a bobina de armadura e entao dado por
v
a
= r
a
i
a
+
d
a
dt
+ e
a
= r
a
i
a
+ l
a
di
a
dt
+ e
a
(2.2)
onde r
a
i
a
e a queda de tensao ohmica na resistencia da bobina,
a
= l
a
i
a
e o uxo na
bobina e l
a
di
a
/dt e a tensao induzida pr opria da bobina devido a varia cao de sua corrente.
Na bobina de campo n ao e induzida nenhuma tensao, porque a bobina de campo e xa
e o campo criado pela armadura tambem e xo na direcao ortogonal. O modelo eletrico
para bobina de campo e dado por
v
e
= r
e
i
e
+
d
e
dt
= r
e
i
e
+ l
e
di
e
dt
(2.3)
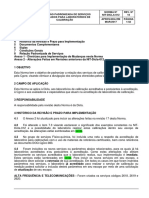
Captulo 2. Acionamento com m aquina de corrente contnua 8
v
a
i
a
r
a
l
a
e
a
v
e
i
e
r
e
l
e
Figura 2.2: Circuito equivalente.
onde r
e
i
e
e a queda de tens ao ohmica na resistencia da bobina,
e
= l
e
i
e
e o uxo na bobina
e l
e
di
e
/dt e a tens ao induzida pr opria da bobina devido a varia cao de sua corrente.
Baseado nas equa coes (2.2) e (2.3), pode-se deduzir diretamente os circuitos eletricos
equivalentes para a armadura e o campo da m aquina CC, conforme ilustrado na Fig. 2.2.
A depender de sua aplica cao uma m aquina eletrica girante pode funcionar como ger-
ador ou como motor. A fun cao de uma m aquina eletrica operando como motor e transfor-
mar energia eletrica em mecanica, a qual e fornecida ` a carga. Para que esta transforma cao
ocorra e necessario que um conjugado eletromagnetico, c
e
, seja criado e aplicado no rotor,
onde uma carga mec ancia, ou uma fonte de energia mec anica, e acoplada, desenvolvendo
um conjugado mecanico resistente c
m
.
O conjugado eletromagnetico e uma grandeza muito importante, pois a boa opera cao
da m aquina depende, dentre outros fatores, diretamente dele. O conjugado eletromagnetico,
nas m aquinas eletricas, e criado pela tendencia do uxo rot orico se alinhar com o uxo
estatorico. Genericamente, o conjugado eletromagnetico e proporcional ao m odulo do
produto vetorial entre o uxo estat orico e o rot orico:
c
e
= k
c
|
a
e
| = k
e
sen(
ae
) = k
e
(2.4)
onde
ae
= /2 e o angulo entre
a
e
e
e k
c
e uma constante. Substituindo
a
= l
a
i
a
e
introduzindo uma nova constante k
c
= l
a
k
c
tem-se outra expressao para o conjugado:
c
e
= k
c
e
i
a
(2.5)
Estas expressoes para o conjugado permitem observar tres aspectos importantes:
i) O m aximo conjugado por uxo e obtido na m aquina CC, pois os uxos s ao ortogonais
(sen(
ae
) = 1).
ii) Fica claro a necessidade do comutador mec anico, j a que ele permite que o uxo
criado no rotor seja unidirecional, apesar do rotor girar continuamente. Se n ao houvesse
comutador, a bobina rot orica se alinharia com a estat orica e o conjugado se anularia
(
ae
= 0).
iii) Por simplicidade considerou-se que o n umero de par de p olos da m aquina (P) e
unt ario, caso contr ario o conjugado passaria a ser expresso por c
e
= Pk
c
e
i
a
Observando os circuitos de excita cao da Fig. 2.2 observa-se que toda a potencia
fornecida pela fonte de alimentacao de excita cao, tensao v
e
, e dissipada na resistencia r
e
.
J a a potencia fornecida (ou recebida) pela fonte de tens ao v
a
e parte dissipada em r
a
e
parte recebida (ou fornecida) pela fonte e
a
. A potencia eletrica fornecida (ou recebida)
Captulo 2. Acionamento com m aquina de corrente contnua 9
pela armadura da m aquina e dada por p
e
= e
a
i
a
. Desprezando-se ainda as perdas eletro-
magneticas internas da m aquina, a potencia eletrica e igual a potencia mecanica no eixo
da m aquina, i.e., p
m
= c
e
r
. As constantes k
e
e k
c
sao aproximadamente iguais. De fato,
substituindo-se as expresoes de e
a
e c
e
na igualdade p
e
= p
m
, obtem-se que k
e
= k
c
.
Uma vez o modelo eletrico deduzido, resta a obten cao do modelo mec anico de movi-
mento. Este modelo e obtido aplicando-se a segunda lei de Newton no eixo da m aquina,
i.e., a for ca resultante aplicada a um corpo e igual a sua massa vezes sua acelera cao.
Observando a Fig. 2.1, pode-se escrever
c
e
c
m
F
m
r
= J
m
d
r
dt
(2.6)
onde F
m
r
e o conjugado de atrito, c
a
, que se op oe ao movimento, nos mancais do
rotor (aproximadamente proporcional a velocidade) e no ar e J
m
e o momento de inercia
da m aquina. Como se trata de um movimento circular, aparecem na lei de Newton a
velocidade angular
r
e o momento de inercia J
m
.
2.3 Modelo da maquina CC
Baseado na an alise da secao anterior s ao apresentados em seguida os modelos da m aquina
CC em suas varias apresenta coes.
2.3.1 Representacao no tempo do modelo dinamico
Baseado nas equa coes anteriores o modelo dinamico da m aquina pode ser apresentado
como se segue:
Equa coes eletricas:
v
a
= r
a
i
a
+ l
a
di
a
dt
+ e
a
(2.7)
v
e
= r
e
i
e
+ l
e
di
e
dt
(2.8)
Equa cao mec anica de movimento:
c
e
c
m
F
m
r
= J
m
d
r
dt
(2.9)
onde:
c
e
= k
e
e
i
a
e
a
= k
e
e
= l
e
i
e
As variaveis e par ametros relacionados nas equa coes acima s ao:
i
a
: corrente de armadura [A], v
a
: tensao de armadura [V ],
e
a
: for ca contra-eletromotriz [V ], v
e
: tensao de excita cao [V ],
e
: uxo de excita cao
[Wb]
c
e
: conjugado eletromagnetico [Nm], c
m
: conjugado de carga [Nm]
Captulo 2. Acionamento com m aquina de corrente contnua 10
r
: velocidade angular do eixo [rad/s]
r
a
: resistencia da armadura [], r
e
: resistencia de excita cao []
l
a
: indutancia de armadura [H], l
e
: indutancia de excita cao [H]
k
e
: constante de m aquina [MKS], F
m
: coeciente de atrito [MKS]
J
m
: momento de inercia da m aquina [MKS]
2.3.2 Modelo de estado
Quando se considera a tensao v
e
constante, a corrente i
e
e o uxo
e
se estabelecem e
permanecem constantes. O modelo din amico da m aquina se simplica, sendo representado
apenas pelas equa coes (2.7) e (2.9). Neste caso, a representa cao do modelo din amico da
m aquina de corrente contnua na forma de equa coes de estado (dx/dt=Ax+Bu) e dado
por:
dx
dt
=
_
r
a
/l
a
k
e
e
/l
a
k
e
e
/J
m
F
m
/J
m
_
x +
_
1/l
a
0
0 1/J
m
_
u (2.10)
onde
x =
_
i
a
r
_
e u =
_
v
a
c
m
_
Quando a velocidade e a vari avel de sada a equa cao de sada (y =Cx+Du) se escreve:
r
=
_
0 1
x (2.11)
Observe que os estados escolhidos neste modelo foram estados fsicos da m aquina: a
corrente de armadura e a velocidade. A corrente de armadura e a velocidade informam
sobre a energia magnetica armazenada na bobina de armadura (l
a
i
2
a
/2) e a energia cinetica
armazenada no rotor (J
m
2
r
/2), respectivamente.
2.3.3 Fun cao de transferencia
Aplicando-se a transformada de Laplace no modelo de estado, obtem-se
sX(s)
_
r
a
/l
a
k
e
e
/l
a
k
e
e
/J
m
F
m
/J
m
_
X(s) =
_
1/l
a
0
0 1/J
m
_
U(s)
X(s) =
_
s + r
a
/l
a
k
e
e
/l
a
k
e
e
/J
m
s + F
m
/J
m
_
1
_
1/l
a
0
0 1/J
m
_
U(s)
_
I
a
(s)
r
(s)
_
=
_
G
ia
(s) G
im
(s)
G
a
(s) G
m
(s)
_ _
V
a
(s)
C
m
(s)
_
onde
G
a
(s) =
K
a
(T
1
s + 1) (T
2
s + 1)
(2.12)
G
m
(s) =
K
m
(T
a
s + 1)
(T
1
s + 1) (T
2
s + 1)
(2.13)
Captulo 2. Acionamento com m aquina de corrente contnua 11
e T
1
= 1/s
1
e T
2
= 1/s
2
sao as constantes de tempo do motor e os p olos s ao dados por
s
1,2
=
(s
a
+ s
m
)
_
(s
a
s
m
)
2
+ 4k
1
k
2
2
(2.14)
com
s
a
= r
a
/l
a
s
m
= F
m
/J
m
k
1
= k
e
e
/l
a
k
2
= k
e
e
/J
m
K
a
=
k
e
e
k
2
e
2
e
+ r
a
F
m
K
m
=
r
a
k
2
e
2
e
+ r
a
F
m
2.3.4 Modelo de regime permanente
Aplicando a condi cao de regime permanente no modelo de estado (termos em d/dt = 0),
obtem-se.
i
a
=
F
m
K
m
r
a
v
a
+ K
a
c
m
(2.15)
r
= K
a
v
a
K
m
c
m
(2.16)
Observa-se que a corrente i
a
aumenta com v
a
e c
m
e
r
aumenta com v
a
e diminui com
c
m
.
2.4 Analise no tempo e na frequencia da maquina CC
A caracteriza cao do motor CC e apresentada aqui no domnio do tempo, por meio da
resposta ao degrau, e no domnio da frequencia, por meio do diagrama de Bode. Inicial-
mente, e determinada a evolu cao no tempo da corrente de armadura i
a
e da velocidade
r
para degraus unit arios de tens ao e de conjugado mec anico. Em seguida, e determinada a
resposta em frequencia do motor, visualizada por meio do diagrama de Bode.
2.4.1 Partida do motor
Nas guras 2.3 e 2.4 s ao apresentadas as respostas da corrente e velocidade do motor
(expressos em pu), com p olos reais e complexos, para o seguinte padr ao de entrada:
[0 < t < t
max
/2 v
a
= 1; c
m
= 0 t
max
/2 < t < t
max
v
a
= 1; c
m
= 1]
Captulo 2. Acionamento com m aquina de corrente contnua 12
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
2
4
6
8
10
12
14
Corrente de armadura Ia
t [s]
i
a
[
A
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Velocidade angular Wm
t [s]
w
m
[
r
a
d
/
s
]
Figura 2.3: Resposta no tempo. Corrente e velocidade na partida do motor - P olos reais
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
4
2
0
2
4
6
8
Corrente de armadura Ia
t [s]
i
a
[
A
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.5
1
1.5
2
Velocidade angular Wm
t [s]
w
m
[
r
a
d
/
s
]
Figura 2.4: Resposta no tempo. Corrente e velocidade na partida do motor - P olos
complexos
Captulo 2. Acionamento com m aquina de corrente contnua 13
10
3
10
2
10
1
10
0
10
1
10
2
10
3
10
4
40
30
20
10
0
10
20
30
Corrente Ia / Tensao Va Modulo
10
3
10
2
10
1
10
0
10
1
10
2
10
3
10
4
120
100
80
60
40
20
0
20
Velocidade Wm / Tensao Va Modulo
Figura 2.5: Resposta em frequencia. Amplitude da corrente e velocidade do motor - Polos
reais
10
3
10
2
10
1
10
0
10
1
10
2
10
3
10
4
40
30
20
10
0
10
20
30
Corrente Ia / Tensao Va Modulo
10
3
10
2
10
1
10
0
10
1
10
2
10
3
10
4
100
80
60
40
20
0
20
Velocidade Wm / Tensao Va Modulo
Figura 2.6: Resposta em frequencia. Amplitude da corrente e velocidade do motor - Polos
complexos
Captulo 2. Acionamento com m aquina de corrente contnua 14
Controlador
Processo
Dinmico
(varivel de entrada)
sinal de
referncia
varivel
de sada
Controlador
Processo
Dinmico
(varivel de entrada)
varivel
de sada
+
_
(a) Malha aberta
(b) Malha fechada
sinal de
referncia
Figura 2.7: Controlador e processo a ser controlado: (a) controlador sem realimenta cao e
(b) controlador com realimenta cao.
2.4.2 Resposta em frequencia
Nas guras 2.5 e 2.6 s ao apresentadas os diagramas de Bode da amplitude da corrente
e da velocidade do motor, com p olos reais e complexos, para entrada senoidal de tens ao
(c
m
= 0).
2.5 Controle de velocidade do motor CC
Um sistema de controle, ou simplesmente controlador, pode ser denido como um dis-
positivo que permite obter a resposta desejada da vari avel do processo a ser controlado
(vari avel de sada do processo). Em geral, pode-se considerar dois tipos de controladores:
com ou sem realimentacao da vari avel de sada. O controlador sem realimenta cao, ou de
malha aberta (feedforward controller), controla a vari avel de sada do processo sem sua
medicao (Fig. 2.7a). O controlador com realimenta cao, ou de malha fechada (feedback
controller), utiliza a medi cao da vari avel de sada que se deseja controlar (Fig. 2.7b).
A funcao do motor CC em acionamentos a velocidade vari avel e impor ` a uma carga
mecanica qualquer no eixo do motor, representada pelo conjugado mec anico c
m
, uma ve-
locidade desejada
r
, dita velocidade de referencia. A tensao de alimenta cao v
a
e a vari avel
de entrada de comando que permite alterar a velocidade, considerada na sada do pro-
cesso. Na gura 2.8 e apresentado um diagrama de blocos do sistema motor e controlador
com realimenta cao. A tens ao de alimenta cao v
a
tambem afeta a corrente de armadura i
a
.
Outras vari aveis fsicas importantes do processo sao o conjugado eletromagnetico c
e
, pro-
porcional ` a corrente i
a
, e o conjugado mec anico c
m
, que pode ser considerado como uma
pertuba cao no controle de
r
. Tensao, corrente, velocidade e conjugados s ao grandezas
fsicas do motor que devem ser mantidas dentro de certos limites m aximos em fun cao da
capacidade da maquina.
Nesta secao s ao estudados controladores de velocidade para o motor CC: controlador
em malha aberta, controlador PID (sem malha interna de corrente/conjugado) e contro-
Captulo 2. Acionamento com m aquina de corrente contnua 15
dx/dt = A x + Bu
y = C x
u = [va cm ]
x = [ia r ]
T
T
y = r
Motor CC
r
v
a
c
m
r
*
Controlador
Carga
Mecnica
Fonte de
Tenso
c
m
= perturbao = comando
v
a
r
= sada
r
= sada de referncia
*
Figura 2.8: Controle em malha fechada da m aquina de corrente contnua.
lador em cascata (com malha interna de corrente/conjugado).
O controle de velocidade discutido aqui assume que o uxo de excita cao da m aquina e
imposto constante por meio da alimenta cao da bobina estat orica com tensao de excita cao
v
e
constante.
A alimentacao em tens ao do motor CC e realizada por meio de fontes de tens ao CC
controladas (cf. a se cao 2.6). Uma fonte de tens ao de armadura de potencia dene a tensao
v
a
e uma fonte de excita cao, de baixa potencia, dene a tensao v
e
. Em alguns casos, para
efeito do c alculo dos controladores, ser a considerado que as fontes de alimenta cao s ao
ideais, isto e, a fonte segue a referencia desejada instantaneamente e com ganho unit ario.
2.5.1 Controlador de velocidade com a cao direta na tensao
Controlador de velocidade em malha aberta
O controlador em malha aberta e uma alternativa conceitualmente bastante simples, prin-
cipalmente se e utilizado apenas o modelo do processo na sua forma est atica, i.e., de regime
permanente.
Assim, da express ao da velocidade em regime permanente do motor CC, termos d/dt
no modelo de estado iguais a zero, obtem-se:
v
a
=
1
K
a
r
+
K
m
K
a
c
m
(2.17)
Captulo 2. Acionamento com m aquina de corrente contnua 16
S
w
r
*
K
+
+
v
Motor
Fonte
+
c
m
m
*
a
K
a
1
K
a
w
r
*
Figura 2.9: Diagrama de blocos do motor CC com controle sem realimenta cao.
onde v
a
e
r
sao a tens ao e a velocidade de referencia e
K
a
=
k
e
e
k
2
e
2
e
+ r
a
F
m
K
m
=
r
a
k
2
e
2
e
+ r
a
F
m
Utilizando-se esta expressao pode-se denir o controlador em malha aberta. Na gura
2.9 e apresentado o diagrama de blocos do sistema completo com o controlador, fonte e
motor CC. Note que nos controladores em geral a sua sada, aqui a tens ao referencia de
alimentacao do motor v
a
, e limitada para proteger o processo que est a sendo controlado.
O controlador em malha aberta necessita a medi cao do conjugado mec anico c
m
(per-
turba cao) e sup oe que o modelo do motor CC e seus par ametros sejam exatamente aqueles
do motor CC real. Se estas condicoes n ao s ao sastisfeitas, existir a um erro de regime per-
manente e
r
-
r
. Em geral, devido a estas importantes limita coes, a utiliza cao
pr atica isolada deste tipo de controlador n ao e recomendada. No restante deste captulo
so ser ao discutidos os controladores com realimenta cao.
Controlador de velocidade PID
Para assegurar que o erro estacion ario do sistema em malha fechada, com uma entrada do
tipo degrau, seja zero, e necessario que ao menos uma das partes da fun cao de transferencia
do controlador do diagrama da gura 2.10 possua um p olo em s = 0 (integrador).
O controlador do tipo PI com fun cao de transferencia D(s) = k
p
+k
i
/s tem um p olo
em s = 0, que assegura um erro estacionario nulo, e um zero em s = k
i
/k
p
.
Para o dimensionamento das constantes k
p
e k
i
do controlador PI pode-se utilizar
uma tecnica de projeto baseada no cancelamento do p olo dominante (mais lento) do
sistema e alocacao dos p olos do sistema em malha fechada segundo o comportamento
dinamico especicado. Este procedimento simplica a dedu cao dos valores dos ganhos do
controlador.
Todavia, com o controlador PI n ao e possvel alocar os p olos de malha fechada de
modo a obter um sistema mais r apido do que o sistema em malha aberta ou independente
dos p olos do motor.
Captulo 2. Acionamento com m aquina de corrente contnua 17
Kp
_
+ Motor
c
r
v *
a
m
Fonte
*
+
r
Ki
+
+
d/dt
Kd
+
Figura 2.10: Sistema de controle com o controlador PID.
O controlador PID, apresentado na gura 2.10, e mais adequado para o controle de
velocidade do motor de corrente contnua que o controlador PI. A motivacao inicial da
introdu cao do termo derivativo de
/dt e fazer com que o controlador aja j a na varia cao
do erro, permitindo assim a obtencao de um sistema em malha fechada mais r apido que
o PI. A funcao de transferencia do controlador PID idealizado e dada por:
D(s) = k
p
+
k
i
s
+ k
d
s (2.18)
onde
D
p
(s) = k
p
(2.19)
D
i
(s) =
k
i
s
(2.20)
D
d
(s) = k
d
s (2.21)
O termo derivativo k
d
s do diagrama de blocos da gura 2.10, por raz oes pr aticas, n ao
pode ser realizado de forma exata. Observe que um dispositivo fsico que implementasse
exatamente esse termo deveria responder com um impulso (t) quando a entrada fosse um
degrau unit ario. Deste modo, considera coes pr aticas determinam que a implementa cao
do termo derivativo seja feita, p. ex., pela seguinte fun cao de transferencia:
D
a
(s) =
k
d
p
d
s
s p
d
=
k
d
s
sT
d
+ 1
(2.22)
A expressao (2.22) representa uma aproxima cao para o derivador exato da express ao
(2.21). Isso pode ser vericado tomando o limite da expressao (2.22) quando p
d
tende
para menos innito ou T
d
(T
d
= 1/p
d
) tende para zero:
lim
pd
D
a
(s) = D
d
(s) (2.23)
O valor de p
d
e um par ametro de projeto que determina a qualidade do derivador
implementado com a equa cao (2.22). O projetista deve arbitrar um valor de p
d
levando em
consideracao as limita coes fsicas do sistema controlado, e.g., tens ao, corrente e acelera cao
m aximas do motor.
O diagrama de blocos deste controlador e apresentado na gura 2.11.
Captulo 2. Acionamento com m aquina de corrente contnua 18
Gm(s)
+
+
+
Ga(s)
r
*
r
c
m
v
a
_
Kp + Ki + sKd
sTd + 1
s
Figura 2.11: Diagrama de blocos do controlador PID.
Funcao de transferencia do controlador PID aproximado e dada por
D(s) = K
p
+
K
i
s
+
K
d
s
sT
d
+ 1
(2.24)
D(s) =
K
i
{s
2
(T
d
K
p
+ K
d
)/K
i
+ s(T
d
K
i
+ K
p
)/K
i
+ 1}
s(T
d
s + 1)
(2.25)
A expressao (2.25) tem dois p olos, um em s = 0 e outro em s = p
d
= 1/T
d
, e dois
zeros. A localiza cao dos zeros depende dos valores dos ganhos K
p
, K
i
, K
d
.
Com a introdu cao do termo derivador real, o controlador PID tem ampliada sua con-
ceitua cao inicial (possibilitar uma resposta de controle r apida devido ao termo derivativo).
De fato, com esta formula cao este controlador permite alocar os p olos de malha fechada
de modo a obter um sistema resultante em malha fechada com p olos independentes dos
p olos do motor.
Na tecnica de projeto utilizada cancela-se os dois p olos do sistema e ajusta-se o valor
de T
d
para se alocar os p olos de malha fechada no valor desejado (independente dos p olos
do motor).
Funcao de transferencia de malha aberta com PID Fun cao de transferencia de
malha aberta (3
a
ordem) e dada por
r
(s)
E
(s)
= G
o
(s) =
K
a
T
1
T
2
s
2
+ (T
1
+ T
2
)s + 1
K
i
{s
2
(T
d
K
p
+ K
d
)/K
i
+ s(T
d
K
i
+ K
p
)/K
i
+ 1}
s(T
d
s + 1)
Introduzindo as condi coes de cancelamento:
(T
d
K
p
+ K
d
)/K
i
= T
1
T
2
(2.26)
(T
d
K
i
+ K
p
)/K
i
= (T
1
+ T
2
) (2.27)
A funcao de transferencia de malha aberta com cancelamento (2
a
ordem) e dada por:
r
(s)
E
(s)
= G
o
(s) = D(s)G
a
(s) =
K
i
K
a
s (T
d
s + 1)
(2.28)
Captulo 2. Acionamento com m aquina de corrente contnua 19
Gfm(s)
+
+
Gfa(s)
r
*
r
c
m
Figura 2.12: Diagrama de blocos em malha fechada do motor com controlador PID.
Funcao de transferencia de malha fechada com PID A funcao de transferencia
de malha fechada (Fig. 2.12) e dada por:
r
(s)
r
(s)
= G
f
(s) =
G
o
(s)
1 + G
o
(s)
=
K
i
K
a
s (T
d
s + 1) + K
i
K
a
(2.29)
r
(s)
C
m
(s)
= G
fm
(s) =
G
m
(s)
1 + G
o
(s)
=
K
m
s (T
d
s + 1) (T
a
s + 1)
[s (T
d
s + 1) + K
i
K
a
] (T
1
s + 1) (T
2
s + 1)
(2.30)
O erro de regime permanente para degraus de entrada (
r
(s) =
r
/s e C
m
(s) = C
m
/s)
e nulo, calculado por:
r
= [lim
s0
G
f
(s)]
r
+ [lim
s0
G
fm
(s)]C
m
=
r
erro nulo (2.31)
Calculo nal dos parametros do controlador PID Para obter p olos de malha
fechada reais identicos (s
f
= 1/2T
d
), tem-se que
T
d
s
2
+ s + K
i
K
a
= T
d
(s s
f
)
2
K
i
=
1
4K
a
T
d
Considerando tambem as relacoes de cancelamento dos p olos do motor (2.26) e (2.27),
tem-se os par ametros nais do controlador:
T
d
= 1/2s
f
(p olo de malha fechada s
f
)
K
i
=
1
4K
a
T
d
(condi cao p olos reais identicos)
K
p
= (T
1
+ T
2
T
d
)/4K
a
T
d
K
d
= [T
1
T
2
(T
1
+ T
2
T
d
)T
d
]/4K
a
T
d
(condi cao de cancelamento)
Lugar das razes dos p olos de malha fechada com PID A gura 2.13 apresenta
o lugar das razes dos polos de malha fechada do motor com o controlador PID.
A evolu cao dos p olos com K
i
crescente tem a seguinte sequencia: p olos de malha
aberta - p olos reais identicos - polos complexos. Observe que e possvel alocar os p olos
de malha fechada independente dos p olos do motor.
Captulo 2. Acionamento com m aquina de corrente contnua 20
Im
Re
s1
K
i
0
K
i
s2 2T
d
-1/ T
d
-1/
Figura 2.13: Lugar das razes de malha fechada do sistema controlador PID e motor CC.
Resposta no tempo - controlador PID A resposta do motor CC mais controlador
para varia coes da referencia de velocidade (degrau, rampa, senoidal) e do conjugado
mecanico (degrau) e utilizada para caracterizar o funcionamento din amico do sistema
em malha fechada.
Nas guras seguintes sao apresentados os resultados de simula cao do motor com con-
trolador PID em dois valores para T
d
: T
d
= T
2
/10 e T
d
= T
2
/50. O seguinte padr ao de
entrada foi utilizado:
0 < t < t
max
/2
r
= 1, c
m
= 0
t
max
/2 < t < t
max
r
= 1, c
m
= 1
2.5.2 Controle em cascata
Na se cao anterior o controle da velocidade do motor CC foi realizado comandando-se di-
retamente a tensao v
a
de armadura. Entretanto, e possvel controlar o conjugado eletro-
magnetico c
e
e a partir deste controlar a velocidade. No caso desta m aquina o conjugado
eletromagnetico e proporcional ` a corrente de armadura i
a
. Portanto, controlando-se a cor-
rente controla-se o conjugado da m aquina. O controle da corrente apresenta a vantagem
de permitir uma prote cao de sobre-corrente mais efetiva da maquina.
Este metodo em que se controla uma vari avel interna e a partir desta a variavel de
sada, objetivo nal do controle, e denominado de controle em cascata. Para que isto
possa ser feito e necessario que a malha interna de controle seja mais r apida que a malha
externa. Isto e possvel porque em geral a constante de tempo mec anica (T
m
= J
m
/F
m
)
e bem superior a constante de tempo eletrica (T
a
= l
a
/r
a
). Por exemplo, para a m aquina
CC utilizada T
m
= 150s e T
a
= 30ms.
Alem da protecao mais efetiva da m aquina o controle em cascata permite o c alculo
dos controladores baseado em funcoes de transferencia mais simples, ja que o sistema e
subdividido.
Nesta secao ser a estudado o controle em cascata como apresentado no diagrama da
Figura 2.16. Este esquema possui um controlador de velocidade e um controlador interno
de corrente. Os controladores sao do tipo PI (Controlador Proporcional Integral), cujas
Captulo 2. Acionamento com m aquina de corrente contnua 21
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
20
40
60
80
Corrente de armadura Ia
t [s]
A
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Velocidade angular Wm
t [s]
r
a
d
/
s
Figura 2.14: Resposta no tempo com o Controlador PID (T
d
= T
2
/10).
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
100
200
300
400
Corrente de armadura Ia
t [s]
A
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Velocidade angular Wm
t [s]
r
a
d
/
s
Figura 2.15: Resposta no tempo com o Controlador PID (T
d
= T
2
/50).
Captulo 2. Acionamento com m aquina de corrente contnua 22
+
_
+
_
_
MOTOR CC
+
+
_
m
c
+
v G 1
G
2
G
+
e
k e l pii G
w pi G
a
r
i
w
e G
*
*
a
e
^
a
e
r
w
a i
S S
S
S
Figura 2.16: Diagrama de blocos do controle de velocidade do motor CC com controle
interno de corrente.
_
_
+ +
v G
1
G
pii G
+
e
G
+
a
e
a
i
*
S
S
S
a
v
*
a
v
*
a
v
a
i
a
e
^
Figura 2.17: Diagrama de blocos do controle de corrente do motor CC.
entradas sao: o erro entre a velocidade de referencia (
m
) e a velocidade atual (
m
),
para o controlador de velocidade externo, e o erro entre a corrente de referencia (i
a
) e
a corrente atual (i
a
), para o controlador de corrente interno. Observa-se que a sada
do controlador de velocidade e quem dene a corrente de referencia para o controle de
corrente. A limita cao do valor m aximo desta corrente de referencia permite limitar a
corrente m axima na m aquina, portanto protegendo-a.
Calculo do controlador de corrente
A gura 2.17. apresenta o diagrama referente ao controle da corrente de armadura.
A equa cao eletrica do motor CC e dada por
v
a
= r
a
i
a
+ l
a
di
a
dt
+ e
a
(2.32)
O termo de fcem e
a
= k
e
m
depende da velocidade e sera considerado como uma
perturba cao para permitir um c alculo simples do controlador, ou seja, utilizando um
modelo de primeira ordem para o m aquina. Isto e possvel porque a velocidade, e portanto
e
a
, evolui mais lentamente que a corrente. Denindo-se a tensao v
a
= v
a
e
a
, pode-se
escrever a equacao (2.32) como
v
a
= r
a
i
a
+ l
a
di
a
dt
(2.33)
Aplicando a Transformada de Laplace a equa cao (2.33), obtem-se a funcao de trans-
ferencia de primeira ordem para o controle da corrente.
I
a
(s) =
1/r
a
T
a
s + 1
V
a
(s) = G
1
(s)V
a
(s) (2.34)
No c alculo dos controladores da se cao anterior se considerou que a fonte de tens ao
que alimenta o motor era ideal. Entretanto na pr atica ela possui pelo menos um pequeno
Captulo 2. Acionamento com m aquina de corrente contnua 23
atraso, traduzido por uma contante de tempo T
v
. Um modelo simples para esta fonte e
dado por
V
a
(s) =
1
T
v
s + 1
V
a
(s) = G
v
(s)V
a
(s) (2.35)
Como v
a
= v
a
e
a
e de acordo com a gura 2.17, tem-se
V
a
(s) = V
a
(s)G
v
(s) E
a
(s) (2.36)
Substituindo-se V
a
(s) = V
a
(s) + E
a
(s)G
e
(s) (cf. gura 2.17) em (2.36) obtemse:
V
a
(s) = V
a
(s)G
v
(s) + E
a
(s)G
e
(s)G
v
(s) E
a
(s) (2.37)
Para que a compensa cao de e
a
seja perfeita G
e
(s) = 1/G
v
(s) e E
a
(s) = E
a
(s), neste
caso a equa cao (2.37) torna-se:
V
a
(s) = V
a
(s)G
v
(s) (2.38)
Substituindo-se V
a
(s), dado em (2.38), na equa cao (2.34), obtem-se a funcao de trans-
ferencia corrente-tensao de referencia:
I
a
(s) =
1/r
a
(T
a
s + 1)(T
v
s + 1)
V
a
(s) = G
i
(s)V
a
(s) (2.39)
A constante de tempo T
v
e muito pequena e n ao deve ser compensada. Assim, pode-se
utilizar preferencialmente um controlador PI.
A funcao de transferencia que representa o controlador PI de corrente e dada por:
G
pii
(s) = k
pi
+
k
ii
s
=
k
ii
(sk
pi
/k
ii
+ 1)
s
(2.40)
A funcao de transferencia de malha aberta com o controlador PI e entao:
G
oi
= G
pii
(s)G
i
(s) =
(k
ii
/r
a
)(sk
pi
/k
ii
+ 1)
s(T
a
s + 1)(T
v
s + 1)
(2.41)
Cancelando-se o polo do sistema eletrico do motor com o zero do PI (T
a
= k
pi
/k
ii
), a
funcao de transferencia de malha aberta (FTMA) G
oi
se escreve:
G
oi
(s) =
k
ia
s(T
v
s + 1)
(2.42)
onde k
ia
= k
ii
/r
a
.
Logo, a fun cao de transferencia de malha fechada (FTMF) G
fi
e dada por:
G
fi
(s) =
k
ia
s(T
v
s + 1) + k
ia
=
k
ia
T
v
s
2
+ s + k
ia
(2.43)
A exemplo do caso anterior, o ganho k
ii
e escolhido de forma que a FTMF tenha polos
reais identicos em malha fechada, neste caso k
ii
= r
a
/(4T
v
). A fun cao de malha fechada
da corrente resultante e dada ent ao por:
I
a
(s) = G
fi
(s)I
a
(s) =
1
(2T
v
s + 1)
2
I
a
(s) (2.44)
Captulo 2. Acionamento com m aquina de corrente contnua 24
+ +
_
_
2
G
w pi G fi G
m
c
r
w
*
a
i
*
S S
a
i
r
w
e
k e l
Figura 2.18: Diagrama de blocos do controle de velocidade do motor CC.
Para simplicar o c alculo do controlador de velocidade (cf. a se cao seguinte), aproxima-
se a funcao de transferencia (2.44), sistema de segunda ordem, por um sistema de primeira
ordem, e assim obtem-se:
I
a
(s) = G
fi
(s)I
a
(s)
=
1
T
v
s + 1
I
a
(s) (2.45)
onde T
v
= 4T
v
Observa-se que para que o sistema de controle seja totalmente consistente com o
procedimento de c alculo e necessario que a fcem e
a
seja compensada na sada do con-
trolador, por meio da sua medi cao (e
a
). Para a fonte de tens ao modelada como um
atraso de primeira ordem nao e possvel fazer G
e
(s) = 1/G
v
(s), teria-se que utilizar uma
aproxima cao.
E comum na pr atica o sistema funcionar sem compensa cao, pois e
a
varia
lentamente. Neste caso e o pr oprio controlador que compensa e
a
. Quando a compensa cao
e feita diretamente pelo controlador, ele e calculado fazendo-se e
a
= 0 no modelo do pro-
cesso. Este procedimento, entretanto, n ao modica os ganhos calculados anteriormente
para o controlador. Na pr oxima se cao e apresentado o c alculo do controlador de veloci-
dade, onde a perturba cao (conjugado mec anico) e anulada no calculo do controlador.
Calculo do controlador de velocidade
A gura 2.18 apresenta o diagrama referente ao controle de velocidade.
A equa cao mec anica de movimento do motor e dada por:
c
e
c
m
= J
m
d
dt
+ F
m
m
(2.46)
Para simplicar o c alculo do controlador, o conjugado mec anico e considerado uma
perturba cao, assim tem-se:
c
e
= c
e
c
m
= J
m
d
dt
+ F
m
m
(2.47)
Aplicando-se a Transformada de Laplace
m
(s) =
(1/F
m
)
T
m
s + 1
C
e
(s) = G
2
C
e
(s) (2.48)
Assumindo que a compensa cao de c
m
seja realizada pelo pr oprio controlador, faz-se
C
m
= 0 e C
e
(s) = C
e
(s) = k
e
e
I
a
(s). Introduzindo-se em (2.48) a fun cao de transferencia
Captulo 2. Acionamento com m aquina de corrente contnua 25
do controle de corrente, equa cao (2.45), obtem-se:
m
(s) =
k
e
e
/F
m
(1 + sT
m
)(T
v
s + 1)
I
a
(s) = G
a
(s) (2.49)
A constante de tempo T
v
ainda e muito pequena e n ao deve ser compensada. Assim,
utiliza-se tambem um controlador PI na malha externa. A funcao de transferencia do
controlador PI externo e dada por:
G
pi
(s) = k
p
+
k
i
s
=
k
i
(sk
p
/k
i
+ 1)
s
(2.50)
De acordo com o diagrama da gura 2.18, tem-se que a fun cao de transferencia de
malha aberta G
o
(s) e dada por:
G
o
(s) = G
pi
(s)G
(s) =
k
im
(sk
p
/k
i
+ 1)
s(1 + sT
m
)(T
v
s + 1)
(2.51)
onde k
im
= k
i
k
e
e
/F
m
.
Cancelando o p olo do sub-sistema mecanico do motor com o zero do controlador de
velocidade (T
m
= k
p
/k
i
), tem-se:
G
o
(s) =
k
im
s(T
v
s + 1)
(2.52)
Portanto a funcao de transferencia de malha fechada G
f
e dada por:
G
f
(s) =
k
im
s(T
v
s + 1) + k
im
=
k
im
T
v
s
2
+ s + k
im
(2.53)
Fazendo k
i
= F
m
/(16k
e
e
T
v
), a FTMF ter a p olos reais identicos em malha fechada,
dada por:
m
(s) = G
f
(s)
m
(s) =
1
(2T
v
s + 1)
2
m
(s) (2.54)
2.6 Fonte de tensao de alimenta cao
A alimentacao em tens ao do motor CC e realizada por meio de uma fonte de tens ao CC
controlada. Nas guras 2.19 e 2.20 s ao apresentados dois exemplos de fontes de tens ao
para acionamento com motor CC: reticador trif asico e conversor fonte de tens ao bif asico.
No caso do reticador, a tens ao CC gerada, v
a(cc)
, e a sua parte CA, v
a(ac)
, possuem
as seguintes caractersticas:
v
a(cc)
= V cos(); v
a(cc)
[V, V ]
v
a(ac)
180Hz
onde e o angulo de gatilho do conversor. A corrente i
a
e sempre positiva.
No caso do conversor fonte de tens ao a tens ao CC gerada, v
a(cc)
, e a sua parte CA,
v
a(ac)
, possuem as seguintes caractersticas:
v
a(cc)
= (
T
1
2
)E; v
a(cc)
[E/2, E/2]
v
a(ac)
10kHz 50kHz
onde e a largura de pulso do conversor. A corrente i
a
pode ser positiva ou negativa.
Captulo 2. Acionamento com m aquina de corrente contnua 26
Retificador a Tiristor
v
e
g1
e
g2
e
g3
l
g
l
g
l
g
+
_
_
_
+
+
v
g1
v
g2
v
g3
i
g1
i
g2
i
g3
Mt.CC
T
1
T
2
T
3
T
4
T
5
T
6
a
+
_
i
a
Retificador
v
e i
e
_
+
Sistema trifsico (3
)
Figura 2.19: Reticador trif asico e m aquina de corrente contnua.
q
5
q
6
q
8
q
7
C
E
_
Conversor Chaveado
v
Mt.CC
a
+
_
i
a
Retificador
ve i
e
_
+
R
e
t
i
f
i
c
a
d
o
r
3
C
+
Figura 2.20: Conversor bif asico fonte de tens ao e m aquina de corrente contnua.
Captulo 3
Modelo da maquina de corrente
alternada
3.1 Introdu cao geral
A resolu cao analtica dos sistemas de equa coes referentes aos circuitos eletricos acoplados
magneticamente e penosa, mesmo se estas equa coes sao a coecientes constantes. Este
tipo de resolu cao torna-se impratic avel se os coecientes variam em funcao do tempo, o
que e o caso das m aquinas girantes. Assim, sao necessarias transforma coes de vari aveis
que permitam obter rela coes entre as novas vari aveis mais simples que aquelas existentes
entre as vari aveis reais.
O objetivo deste captulo e apresentar representa coes din amicas que facilitem o estudo
de sistemas com maquinas de corrente alternada sncrona e assncronas.
3.2 Equa c oes gerais das maquinas trifasicas
3.2.1 Conven coes, hip oteses e nota coes
A m aquina trif asica estudada ao longo deste captulo (Fig. 3.1a) obedece as seguintes
consideracoes:
Conven c oes e hip oteses:
Maquina simetrica trif asica composta por: tres fases no estator identicas de ndices
s1, s2, e s3; tres fases no rotor identicas de ndices r1, r2 e r3.
Angulos eletricos entre bobinas de estator ou rotor igual a 2/3 radianos eletricos.
Correntes positivas criam uxos positivos no sentido do eixo (Fig.3.1b).
Convencao receptor.
Maquina bipolar: n umero de par de p olos P = 1, no caso multipolar
r
= P
m
.
Distribui cao senoidal do uxo magnetico.
27
Captulo 3. Modelo da m aquina de corrente alternada 28
Entreferro constante: comprimento do circuito magnetico servindo para o c alculo
da indutancia e independente do angulo
m
, ou seja, m aquina a p olos lisos.
Maquina n ao saturada (coenergia (W) igual a energia (W)), podendo-se escrever
para o uxo total e conjugado:
t
=
i
(uxo total igual a soma dos uxos parciais) e
c
e
= dW/d
m
.
v
s1
s2
s3
r1
r2
r3
s2
s
v
s1
s
v
s3
s
i
s2
s
i
s1
s
i
s3
s
v
r
r
i
r2
r
v
r1
r
v
r3
r
i
r3
r
i
r1
r
s
n
s
n
s
n
r
n
r
n
r
n
g
d
i
k
g
n
k
g
v
+
-
k
g
k
g
v
i
g
=
k
r
k
g
k
d
dt
+
funo das correntes
e indutncia
g
k
(a)
(b)
r
c
c
e
m
Figura 3.1: M aquina simetrica trif asica (a) e conven coes utilizadas para as grandezas da
m aquina em uma bobina (b).
Nota coes:
v
s
s
, v
r
r
; i
s
s
, i
r
r
e
s
s
,
r
r
: tensoes, corrente e uxos nas bobinas do estator e rotor, re-
spectivamente. O expoente s e r indica o referencial utilizado: s estator e rotor r
rotor.
L
s
, L
r
: indutancia pr opria de uma bobina do estator e do rotor, respectivamente
(L
s1
= L
s2
= L
s3
= L
s
e L
r1
= L
r2
= L
r3
= L
r
).
M
s
, M
r
: indutancia m utua entre duas bobinas do estator e entre duas bobinas do
rotor, respectivamente (M
s12
= M
s23
= M
s31
= M
s
e M
r12
= M
r23
= M
r31
= M
r
).
M
sr
cos(
i
): indut ancia m utua entre uma bobina do estator e uma do rotor separadas
por um angulo
i
(reparti cao senoidal da indu cao electromagnetica no entreferro).
R
s
, R
r
: resistencias de uma bobina do estator e do rotor respectivamente. (R
s1
=
R
s2
= R
s3
= R
s
e R
r1
= R
r2
= R
r3
= R
r
).
3.2.2 Express oes dos uxos, tens oes, conjugado e potencia
Express oes dos uxos
Captulo 3. Modelo da m aquina de corrente alternada 29
Nao havendo satura cao, pode-se somar os uxos parciais para obter o uxo total em
uma bobina. Assim, tem-se para a armadura trif asica do estator:
s
s1
= L
s
i
s
s1
+M
s
i
s
s2
+M
s
i
s
s3
+M
sr
cos(
r
)i
r
r1
+M
sr
cos(
r
+2/3)i
r
r2
+M
sr
cos(
r
+4/3)i
r
r3
(3.1)
s
s2
= M
s
i
s
s1
+L
s
i
s
s2
+M
s
i
s
s3
+M
sr
cos(
r
+4/3)i
r
r1
+M
sr
cos(
r
)i
r
r2
+M
sr
cos(
r
+2/3)i
r
r3
(3.2)
s
s3
= M
s
i
s
s1
+M
s
i
s
s2
+L
s
i
s
s3
+M
sr
cos(
r
+2/3)i
r
r1
+M
sr
cos(
r
+4/3)i
r
r2
+M
sr
cos(
r
)i
r
r3
(3.3)
Os uxos do rotor
r1
,
r2
e
r3
podem ser escritos de forma an aloga.
Os uxos por armadura podem ser escritos em forma matricial, obtendo-se a seguinte
representa cao:
s
s123
= L
ss
i
s
s123
+ L
sr
i
r
r123
(3.4)
r
r123
= L
rs
i
s
s123
+ L
rr
i
r
r123
(3.5)
onde:
i
s
s123
=
i
s
s1
i
s
s2
i
s
s3
i
r
r123
=
i
r
r1
i
r
r2
i
r
r3
s
s123
=
s
s1
s
s2
s
s3
r
r123
=
r
r1
r
r2
r
r3
L
ss
=
L
s
M
s
M
s
M
s
L
s
M
s
M
s
M
s
L
s
L
rr
=
L
r
M
r
M
r
M
r
L
r
M
r
M
r
M
r
L
r
L
sr
= M
sr
cos(
r
) cos(
r
+ 2/3) cos(
r
+ 4/3)
cos(
r
+ 4/3) cos(
r
) cos(
r
+ 2/3)
cos(
r
+ 2/3) cos(
r
+ 4/3) cos(
r
)
L
rs
= M
sr
cos(
r
) cos(
r
+ 4/3) cos(
r
+ 2/3)
cos(
r
+ 2/3) cos(
r
) cos(
r
+ 4/3)
cos(
r
+ 4/3) cos(
r
+ 2/3) cos(
r
)
As matrizes indutancias possuem as seguintes propriedades:
L
ss
e L
rr
sao matrizes simetricas,
L
sr
e L
rs
nao s ao matrizes simetricas, mas circulantes, isto e, x
i,j
= x
i+1,j+1
,
L
sr
= L
T
rs
, uma matriz e a transposta da outra.
O sistema (3.4)-(3.5) pode ser ainda escrito de forma mais compacta.
= L i (3.6)
onde
i =
_
i
s123
i
r123
T
=
_
s123
r123
T
L =
_
L
ss
L
sr
L
rs
L
rr
_
Express oes das tens oes
Captulo 3. Modelo da m aquina de corrente alternada 30
As orientacoes das bobinas, por conven cao, s ao de tal forma que uma corrente positiva
cria um uxo positivo (sentido do eixo) (Fig.3.1b). Assim, pode-se escrever:
v
i
=
d
dt
onde v
i
e a tensao induzida nos terminais da bobina, antes da queda de tens ao resistiva, (
v
i
= e
fcem
, onde e
fcem
a f.c.e.m ) e e o uxo na bobina. Visto a escolha da conven cao
receptor:
v = Ri + v
i
= Ri +
d
dt
Assim, para a m aquina trif asica pode-se escrever em termos das matrizes:
v
s
s123
= R
s
i
s
s123
+
d
s
s123
dt
(3.7)
v
r
r123
= R
r
i
r
r123
+
d
r
r123
dt
(3.8)
onde:
v
s
s123
=
_
v
s
s1
v
s
s2
v
s
s3
T
v
r
r123
=
_
v
r
r1
v
r
r2
v
r
r3
T
A partir da equa cao matricial dos uxos pode-se escrever as equa coes das tens oes:
v
s
s123
= R
s
i
s
s123
+ L
ss
di
s
s123
dt
+ L
sr
di
r
r123
dt
+
r
_
dL
sr
d
r
_
i
r
r123
(3.9)
v
r
r123
= R
r
i
r
r123
+ L
rr
di
r
r123
dt
+ L
rs
di
s
s123
dt
+
r
_
dL
rs
d
r
_
i
s
s123
(3.10)
onde:
r
= d
r
/dt e a velocidade do rotor em rad.eletricos/s.
Ou ainda de forma mais geral
v = R i + L
di
dt
+
r
_
dL
d
r
_
i (3.11)
onde:
v =
_
v
s
v
r
_
R
s
= R
s
I
3
R
r
= R
r
I
3
R =
_
R
s
0
3
0
3
R
r
_
onde I
3
e 0
3
sao as matrizes identidade e zeros de ordem 3x3, respectivamente.
A soma dos termos diferenciais da corrente em (3.11) e a tensao induzida de trans-
forma cao e o termo em
r
e a tens ao induzida de rota cao.
Express ao do conjugado eletromagnetico
A expressao geral para energia e dada por:
W =
1
2
i
T
L i (3.12)
O conjugado e obtido diferenciando-se esta expressao em rela cao ao angulo mec anico
m
:
c
e
=
dW
d
m
(3.13)
Captulo 3. Modelo da m aquina de corrente alternada 31
Substituindo em (3.13) a expressao da energia (3.12), tem-se:
c
e
=
1
2
i
T
_
dL
d
m
_
i =
P
2
i
T
_
dL
d
r
_
i (3.14)
Como as sub-matrizes L
ss
e L
rr
de L sao independentes do angulo eletrico
r
, escreve-se
ent ao:
c
e
=
P
2
_
i
s
s123
i
r
r123
_
T
_
0
3
dL
sr
/d
r
dL
rs
/d
r
0
3
_ _
i
s
s123
i
r
r123
_
(3.15)
ou
c
e
=
P
2
i
sT
s123
_
dL
sr
d
r
_
i
r
r123
+
P
2
i
rT
r123
_
dL
rs
d
r
_
i
s
s123
(3.16)
Como c
e
e um n umero c
T
e
= c
e
e como para duas matrizes A e B quaisquer (ABC)
T
=
C
T
B
T
A
T
, entao:
P
2
i
sT
s123
_
dL
sr
d
r
_
i
r
r123
=
P
2
i
rT
r123
_
dL
rs
d
r
_
i
s
s123
(3.17)
Como L
sr
= L
T
rs
, obtem-se:
c
e
= Pi
sT
s123
_
dL
sr
d
r
_
i
r
r123
(3.18)
c
e
= Pi
rT
r123
_
dL
rs
d
r
_
i
s
s123
(3.19)
Express ao da potencia instant anea
A expressao da potencia total instant anea e dada por:
p = i
T
v (3.20)
Substituindo-se o valor de v dado em (3.11), obtem-se:
p = i
T
R i + i
T
L
di
dt
+
r
i
T
_
dL
d
r
_
i (3.21)
O termo diferencial da corrente corresponde a potencia de transforma cao e o termo
em
r
corresponde a potencia de rota cao.
3.3 Representa cao odq da maquina trifasica
3.3.1 Deni cao da transformacao odq
Dado o modelo da m aquina trif asica representado pelas equa coes de uxo (3.4)-(3.5),
de tensao (3.7)-(3.8) e de conjugado (3.18), pode-se denir uma transformacao para as
vari aveis da m aquina (uxo, corrente ou tens ao) de tal forma a represent a-la por um
modelo mais simples que o trif asico primitivo.
Uma transforma cao de vari aveis e denida pela opera cao:
x
123
= Px
odq
(3.22)
Captulo 3. Modelo da m aquina de corrente alternada 32
onde x
123
e a vari avel antiga a ser transformada e x
odq
e a vari avel nova. A matriz P e
denominada matriz de transforma cao e deve ser regular (P
1
, sua inversa, existe).
Considerando-se uma matriz P
s
para o estator e outra P
r
para o rotor, pode-se escrever
para uma vari avel x qualquer (ou seja, os uxos, as correntes ou as tens oes do estator ou
do rotor):
x
s
s123
= P
s
x
g
sodq
(3.23)
x
r
r123
= P
r
x
g
rodq
(3.24)
onde:
x
g
sodq
=
_
x
so
x
g
sd
x
g
sq
T
x
rodq
=
_
x
ro
x
g
rd
x
g
rq
T
O expoente g, introduzido agora, serve para indicar o referencial generico dos eixos dq.
Este expoente mudara em funcao do referencial dq utilizado, exemplos: estator g s,
rotor g r, campo girante g e.
Um conjunto de matrizes P
s
e P
r
adequadas para a obten cao de uma nova repre-
senta cao mais simples que a representa cao trif asica primitiva pode ser obtida fazendo-se:
P
s
=
_
2
3
1/
2 cos(
g
) sen(
g
)
1/
2 cos(
g
2/3) sen(
g
2/3)
1/
2 cos(
g
4/3) sen(
g
4/3)
(3.25)
P
r
=
_
2
3
1/
2 cos(
g
r
) sen(
g
r
)
1/
2 cos(
g
r
2/3) sen(
g
r
2/3)
1/
2 cos(
g
r
4/3) sen(
g
r
4/3)
(3.26)
Nota-se que P
1
s
= P
T
s
e P
1
r
= P
T
r
, ou seja as matrizes de transformacao s ao
ortogonais.
3.3.2 Express oes dos uxos, tens oes e conjugado em odq
Expressoes dos uxos em odq
Dada a express ao dos uxos estat oricos (3.4) e as equa coes de transforma cao (3.23)-(3.24)
pode-se escrever:
P
s
g
sodq
= L
ss
P
s
i
g
sodq
+ L
sr
P
r
i
g
rodq
(3.27)
multiplicando ambos os lados da igualdade por P
1
s
, tem-se:
g
sodq
= P
1
s
L
ss
P
s
i
g
sodq
+ P
1
s
L
sr
P
r
i
g
rodq
(3.28)
ou ainda
g
sodq
= L
ssodq
i
g
sodq
+ L
srodq
i
g
rodq
(3.29)
onde
L
ssodq
=
l
so
0 0
0 l
s
0
0 0 l
s
L
srodq
=
0 0 0
0 l
m
0
0 0 l
m
com l
so
= L
s
+ 2M
s
, l
s
= L
s
M
s
e l
m
= (3/2)M
sr
.
Captulo 3. Modelo da m aquina de corrente alternada 33
De forma an aloga obtem-se das rela coes (3.5) e (3.23)-(3.24) a nova express ao para os
uxos rot oricos
g
rodq
= L
rrodq
i
g
rodq
+ L
rsodq
i
g
sodq
(3.30)
onde
L
rrodq
=
l
ro
0 0
0 l
r
0
0 0 l
r
L
rsodq
= L
srodq
=
0 0 0
0 l
m
0
0 0 l
m
com l
ro
= L
r
+ 2M
r
, l
r
= L
r
M
r
.
Observa-se que todas as novas matrizes indut ancias s ao diagonais constantes indepen-
dentes dos angulos
r
e
g
. As indutancias l
s
, l
so
, l
r
, l
ro
e l
m
sao denominadas indut ancias
cclicas.
Expressoes das tensoes em odq
Segundo a expressao das tens oes estat oricas em (3.7) e as equa coes de transforma cao
(3.23)-(3.24), pode-se escrever:
v
g
sodq
= P
1
s
r
s
P
s
i
g
sodq
+ P
1
s
d
dt
_
P
s
g
sodq
(3.31)
v
g
sodq
= r
s
i
g
sodq
+
d
g
sodq
dt
+
g
P
1
s
_
dP
s
d
_
g
sodq
(3.32)
v
g
sodq
= r
s
i
g
sodq
+
d
g
sodq
dt
+
g
0 0 0
0 0 1
0 1 0
g
sodq
(3.33)
onde r
s
= R
s
e
g
= d
g
/dt.
De forma an aloga, obtem-se das rela coes (3.8) e (3.23)-(3.24) a nova express ao da
tensao rot orica
v
g
rodq
= r
r
i
g
rodq
+
d
g
rodq
dt
+ (
g
r
)
0 0 0
0 0 1
0 1 0
g
rodq
(3.34)
onde r
r
= R
r
.
Evidentemente, as equa coes (3.33)-(3.34) podem ser escritas em fun cao unicamente
das correntes substituindo-se as matrizes uxos pelos seus valores em (3.29)-(3.30).
Expressoes do conjugado em odq
Utilizando-se a expressoes do conjugado eletromagnetico (3.18) e as equa coes de trans-
forma cao (3.23)-(3.24) pode-se escrever:
c
e
= Pi
gT
sodq
P
T
s
_
dL
sr
d
r
_
P
r
i
g
rodq
(3.35)
Desenvolvendo-se esta expressao, obtem-se a seguinte express ao para o conjugado:
c
e
= Pl
m
(i
g
sq
i
g
rd
i
g
sd
i
g
rq
) (3.36)
Captulo 3. Modelo da m aquina de corrente alternada 34
Expressoes da potencia em odq
Pode-se observar que a potencia instant anea e invariante no caso da transforma cao ortog-
onal. De fato, pela deni cao da potencia instant anea escreve-se:
p = i
T
v = p
s123
+ p
r123
= i
sT
s123
v
s
s123
+ i
rT
r123
v
r
r123
(3.37)
Por exemplo, para o estator, como i
s
s123
= Pi
g
sodq
e v
s
s123
= Pv
g
sodq
escreve-se de (3.37)
para a potencia estat orica p
s123
:
p
s123
= i
gT
sodq
P
T
Pv
g
sodq
(3.38)
Desde que p
sodq
= i
gT
sodq
v
g
sodq
, p
sodq
sera igual a p
s123
se P
T
P = I
3
, o que e assegurado se a
matriz de transforma cao P e ortogonal (P
1
= P
T
).
Observa-se que as vari aveis x
o
(ndice o), denominadas de homopolares, s ao propor-
cionais a soma das grandezas trif asicas originais (x
o
= (1/
3)(x
1
+x
2
+x
3
), portanto se a
m aquina estiver operando de forma equilibrada (carga ou fontes de alimenta cao trif asica
equilibrada) estes componentes sao nulos. Neste caso, o estudo da m aquina se reduz ao es-
tudo dos componentes x
g
d
e x
g
q
, reduzindo-se a maquina trif asica a uma m aquina bif asica
dq (cf. tem seguinte). Tambem, se uma das armaduras estiver ligada em estrela
(tri angulo) n ao interconectado, a soma das correntes (tens oes) trif asicas na armadura
e zero e portanto as vari aveis homopolares correspondentes nesta armadura s ao nulas.
Finalmente, nota-se que o conjugado n ao depende dos componentes homopolares.
3.3.3 Interpreta cao fsica
A transforma cao odq corresponde a representar cada armadura trif asica original do estator
e do rotor por uma armadura bif asica dq, mais uma bobina isolada de ndice o (Figura
3.2).
Para que a armadura bif asica seja equivalente a armadura trif asica, uma condi cao se
impoe: a inducao no entreferro (p. ex. no ponto m) criada por cada armadura devem ser
iguais (Figura 3.2). Assim, tem-se, por exemplo, para a armadura estat orica:
a indu cao resultante criada pela armadura trif asica no ponto m e dada por:
B
3m
= K
3
n
3
[i
s
s1
cos() + i
s
s2
cos( 2/3) + i
s
s3
cos( 4/3)] (3.39)
ou ainda
B
3m
= K
3
n
3
[(i
s
s1
1
2
i
s
s2
1
2
i
s
s3
) cos() + (
3
2
i
s
s2
3
2
i
s
s3
)sen()] (3.40)
a indu cao resultante criada em m pela armadura bif asica e dada por:
B
2m
= K
2
n
2
[i
g
sd
cos(
g
) + i
g
sq
sen(
g
)] (3.41)
ou ainda
B
2m
= K
2
n
2
[(i
g
sd
cos(
g
) i
g
sq
sen(
g
)) cos() + (i
g
sd
sen(
g
) i
g
sq
cos(
g
g
))sen()]
(3.42)
Captulo 3. Modelo da m aquina de corrente alternada 35
Onde n3 e n2 s ao o n umero de espiras das bobinas da armadura trif asica e bif asica,
respectivamente, e K3 e K2 s ao constantes que dependem da estrutura geometrica da
m aquina e do meio magnetico. Estas constantes podem ser feitas identicas, isto e, K3 =
K2.
v
s1
s2
s3
s2
s
v
s1
s
v
s3
s
i
s2
s
i
s1
s
i
s3
s
m
(a)
o
sq
v
sd
g
m
(a)
o
i
sd
g
v
sq
g
sd
i
sq
g
s1
g
g
s
P
-1
s
P
i
so
so
v
+ -
so
so
Figura 3.2: Armaduras trif asica e bif asica equivalentes.
Igualando-se a indu cao no ponto m devido a cada armadura, isto e B
2m
= B
3m
para
um qualquer, tem-se:
n
2
(i
g
sd
cos(
g
) i
g
sq
sen(
g
)) = n
3
(i
s
s1
1
2
i
s
s2
1
2
i
s
s3
)
n
2
(i
g
sd
sen(
g
) i
g
sq
cos(
g
)) = n
3
(
3
2
i
s
s2
3
2
i
s
s3
)
ou ainda
i
g
sd
=
n
3
n
2
[i
s
s1
cos(
g
) + i
s
s2
cos(
g
2/3) + i
s
s3
cos(
g
4/3)] (3.43)
i
g
sq
=
n
3
n
2
[i
s
s1
sen(
g
) + i
s
s2
sen(
g
2/3) + i
s
s3
sen(
g
4/3)] (3.44)
Para que a transforma cao seja biunvoca e necessario introduzir uma terceira corrente,
a corrente homopolar i
o
que e proporcional a soma das correntes trif asicas. A corrente
homopolar, deve ser proporcional a soma das correntes trifasicas de forma a nao criar
inducao no entreferro da m aquina, condi cao para n ao ter aparecido na equivalencia de
inducao acima.
Introduzindo-se o componente homopolar e usando a equa cao (3.43)-(3.44), obtem-se
em forma matricial:
i
so
i
g
sd
i
g
sq
=
n
3
n
2
k k k
cos(
g
) cos(
g
2/3) cos(
g
4/3)
sen(
g
) sen(
g
2/3) sen(
g
4/3)
i
s
s1
i
s
s2
i
s
s3
(3.45)
As constantes k e a rela cao n
3
/n
2
podem ser escolhidas arbitrariamente. Aqui elas
sao escolhidas de tal forma que a matriz de transforma cao seja ortogonal. Nesse caso
k = 1/
2 e n
3
/n
2
=
_
2/3 obtendo-se a matriz P
s
anterior dada em (3.25).
Captulo 3. Modelo da m aquina de corrente alternada 36
De forma semelhante, pode-se deduzir a matriz P
r
, equa cao (3.26), substituindo-se
simplesmente
g
por
g
r
. Portanto, a representa cao odq da m aquina trif asica completa
pode ser vista, do ponto de vista dos uxos, como a substitui cao da m aquina trif asica
(Fig.3.3a) por um par de bobinas de eixo d (sd e rd), um par de bobinas de eixo q (sq e
rq) e mais duas bobinas isoladas, ditas homopolares, ndice o (so e ro) (Fig.3.3b).
v
s1
s2
s3
r1
r2
r3
s2
s
v
s1
s
v
s3
s
i
s2
s
i
s1
s
i
s3
s
v
r
r
i
r2
r
v
r1
r
v
r3
r
i
r3
r
i
r1
r
s
n
s
n
s
n
r
n
r
n
r
n
r
(a)
sq
v
sd
g
(b)
i
sd
g
v
rq
g
d
s1
g
v
rd
g
i
rd
g
v
sq
g
i
rq
g
s
P
-1
s
P
i
sq
g
r
P
-1
P
r
i
so
so
v
+
-
so
i
ro
ro
v
+ -
ro
so
ro
g
Figura 3.3: Representa cao esquem atica da transforma cao trif asica-odq.
3.3.4 Representacao bifasica dq da maquina ativa
Como foi visto, as correntes homopolares nao criam indu cao no entreferro da m aquina e
assim n ao d ao origem ao conjugado eletromagnetico. Os componentes dq caracterizam
a m aquina ativa e os componentes homopolares traduzem os desequilbrios de sequencia
zero da m aquina trif asica, criados pela alimenta cao desequilibrada.
Considerando-se apenas os componentes dq na representacao odq, pode-se escrever, a
partir das equa coes (3.33)-(3.34) e (3.29)-(3.30) a representa cao da m aquina bif asica dq:
v
g
sdq
= r
s
i
g
sdq
+
d
g
sdq
dt
+
g
_
0 1
1 0
_
g
sdq
(3.46)
v
g
rdq
= r
r
i
g
rdq
+
d
g
rdq
dt
+ (
g
r
)
_
0 1
1 0
_
g
rdq
(3.47)
g
sdq
= l
s
i
g
sdq
+ l
m
i
g
rdq
(3.48)
g
rdq
= l
r
i
g
rdq
+ l
m
i
g
sdq
(3.49)
c
e
= Pl
m
(i
g
sq
i
g
rd
i
g
sd
i
g
rq
) (3.50)
Onde as vari aveis estat oricas sao dadas por:
v
g
sdq
=
_
v
g
sd
v
g
sq
_
i
g
sdq
=
_
i
sd
i
sq
_
g
sdq
=
_
g
sd
g
sq
_
e as vari aveis rot oricas sao semelhantes, obtidas destas trocando-se o ndice s por r.
Captulo 3. Modelo da m aquina de corrente alternada 37
3.3.5 Escolha da posi cao ou referencial para os eixos dq
Algumas possibilidades de interesse para localizacao do par de eixos dq sao:
No estator, com o eixo d ligado ao estator segundo a fase s1, fazendo-se
g
= 0
(
g
= 0). Levando, em regime permanente, a vari aveis dq senoidais de frequencia
igual a das correntes estatoricas.
No rotor, com o eixo d ligado ao rotor segundo a fase r1, fazendo-se
g
=
r
(
g
=
r
). Implicando, em regime permanente, em vari aveis dq senoidais com a
mesma frequencia das correntes rot oricas (p. ex.,
rs
=
r
s
, frequencia de es-
corregamento, se for uma m aquina assncrona e zero se for uma m aquina sncrona).
No campo girante fazendo-se
g
=
s
, que implica, em regime permanente, em
vari aveis dq contnuas.
3.4 Representa cao complexa ou vetorial dq
As variaveis dq podem ser representadas como vetores no plano dq, onde as partes real
e imaginaria corresponde a suas coordenadas cartesianas x = d e y = q, respectiva-
mente.
Neste caso, pode-se introduzir uma vari avel complexa x
g
para representar os vetores
uxo, tens ao, ou corrente do estator ou rotor no plano dq denida como
x
g
=
1
2
(x
g
d
+ jx
g
q
) (3.51)
A partir das equa coes (3.46) a (3.50) e utilizando a deni cao (3.51) obtem-se o modelo
complexo equivalente ao modelo bif asico dq:
v
g
s
= r
s
i
g
s
+
d
g
s
dt
+ j
g
g
s
(3.52)
v
g
r
= r
r
i
g
r
+
d
g
r
dt
+ j(
g
r
)
g
r
(3.53)
g
s
= l
s
i
g
s
+ l
m
i
g
r
(3.54)
g
r
= l
r
i
g
r
+ l
m
i
g
s
(3.55)
c
e
= 2l
m
Im(i
g
s
i
g
r
) = 2l
m
Im(i
g
s
i
g
r
) (3.56)
= Pi
s
s
sen(
i
a
) = P
l
m
l
r
i
s
r
sen(
i
b
) (3.57)
As variaveis e par ametros relacionados a este modelo s ao denidas como se segue:
j =
1
v
g
s
= v
g
sd
+ jv
g
sq
: vetor tens ao estat orica num referencial arbitr ario g
v
s
s
= v
s
sd
+ jv
s
sq
: vetor tens ao estat orica no referencial estat orico s
v
a
s
= v
a
sd
+ jv
a
sq
: vetor tens ao estat orica no referencial uxo estat orico a
i
g
s
= i
g
sd
+ ji
g
sq
: vetor corrente estatorica num referencial arbitr ario g
Captulo 3. Modelo da m aquina de corrente alternada 38
i
i
s
= i
s
+ j0: corrente estat orica no referencial corrente estatorica i
i
s
s
= i
s
sd
+ ji
s
sq
: vetor corrente estatorica no referencial estat orico s
i
r
s
= i
r
sd
+ ji
r
sq
: vetor corrente estatorica no referencial rot orico r
i
a
s
= i
a
sd
+ ji
a
sq
: vetor corrente estatorica no referencial uxo estat orico a
i
b
s
= i
b
sd
+ ji
b
sq
: vetor corrente estatorica no referencial uxo rot orico b
g
s
=
g
sd
+ j
g
sq
: vetor uxo estat orico num referencial arbitr ario g
a
s
=
s
+ j0: uxo estat orico no referencial uxo estat orico a
s
s
=
s
sd
+ j
s
sq
: vetor uxo estat orico no referencial estat orico s
g
r
=
g
rd
+ j
g
rq
: vetor uxo rot orico num referencial arbitr ario g
b
r
=
r
+ j0: uxo rot orico no referencial uxo rot orico b
s
r
=
s
rd
+ j
s
rq
: vetor uxo rot orico no referencial estat orico s
r
r
=
r
rd
+ j
r
rq
: vetor uxo rot orico no referencial rot orico r
a
r
=
a
rd
+ j
a
rq
: vetor uxo rot orico no referencial uxo estat orico a
g
: frequencia de rota cao do referencial arbitr ario
r
: frequencia de rota cao do rotor
v
: frequencia de rota cao do vetor tens ao estat orica
i
: frequencia de rota cao do vetor corrente estat orica
a
: frequencia de rota cao do vetor uxo estat orico
b
: frequencia de rota cao do vetor uxo rot orico
ar
=
a
r
: frequencia de escorregamento do vetor uxo estatorico
br
=
b
r
: frequencia de escorregamento do vetor uxo rotorico
g
: posi cao angular do referencial arbitr ario
r
: posi cao angular do eixo magnetico do rotor
v
: posi cao angular do vetor tens ao estat orica
i
: posi cao angular do vetor corrente estat orica
a
: posi cao angular do vetor uxo estat orico
b
: posi cao angular do vetor uxo rot orico
c
e
: conjugado eletromagnetico
c
m
: conjugado mec anico
l
s
: indutancia cclica estat orica
l
r
: indutancia cclica rot orica
l
m
: indutancia cclica m utua
r
s
: resistencia ohmica estat orica
r
r
: resistencia ohmica rot orica
J: momento de inercia
F: coeciente de atrito
P: n umero de pares de polos
No caso particular da maquina trif asica primitiva alimentada por um sistema trif asico
de tensao equilibrado, tem-se para as tens oes:
v
s
s1
= V
m
cos(
s
t); v
s
s2
= V
m
cos(
s
t 2/3); v
s
s3
= V
m
cos(
s
t 4/3)
Se o eixo d coincide com o eixo da fase 1 (
g
= 0 e
g
= 0) e utilizando-se a matriz de
transforma cao P
s
obtem-se:
v
s
sd
=
_
3
2
V
m
cos(
s
t); v
s
sq
=
_
3
2
V
m
sen(
s
t)
Captulo 3. Modelo da m aquina de corrente alternada 39
g
a
r
v
s
s i
s
s
r
s
v
i
r
r
1
s
1
s
b
a
d
s
s
Figura 3.4: Diagrama vetorial instant aneo da m aquina.
Utilizando-se a matriz de transforma cao (3.51), obtem-se o vetor girante dado por:
v
s
s
=
3
2
V
m
e
jst
A representa cao complexa corresponde a representar a maquina trif asica ativa pelos
vetores girantes resultantes associados a cada vari avel da m aquina (tens ao, uxo e cor-
rente). Assim, trata-se da representa cao mais sum aria possvel para a m aquina. Ela
facilita sobremaneira o estudo das m aquinas trif asicas simetricas. Ela sera tratada na
secao seguinte.
Na gura 3.4 e apresentado o diagrama vetorial instant aneo dos vetores tensao es-
tat orica (v
s
s
), corrente estat orica (i
s
s
), uxo estat orico (
s
s
) e uxo rot orico (
s
r
) da m aquina,
vistos do referencial estat orico (fase s
1
). Tambem, neste diagrama s ao indicados o eixo
magnetico rot orico (fase r
1
) e o eixo d.
3.5 Aplicacao `as maquinas assncrona e sncrona
3.5.1 Maquina assncrona (indu cao)
Na Fig. 3.5 e apresentada a m aquina de indu cao. Note que a m aquina de indu cao e obtida
a partir de uma congura cao da alimenta cao particular da m aquina CA cujo modelo foi
deduzido nas se coes anteriores.
As bobinas estatoricas sao alimentadas por um sistema trif asico equilibrado. As
tensoes na fases da m aquina podem ser expressas por:
Captulo 3. Modelo da m aquina de corrente alternada 40
v
s2
s3
s2
s
v
s1
s
v
s3
s
i s2
s
i
s1
s
i
s3
s
s n
s n
s n
v
2m
r
= 0 v
3m
r
= 0 v
1m
= 0
r
(a) Estator da mquina de Induo
(b) Rotor da Mquina de Induo
s
s
s1
s
s2
s
s3
s
s
v
10
s
= Vcos(wst)
v
20
s
v
30
= Vcos(wst-120)
= Vcos(wst+120)
s
n
0
s1
s1
r1
r2
r3
i
r3
r
i
r1
r
r n
r
n
r
c
c
e
m
i
r2
r
r
n
r3
r
r1
r
r2
r
r
r
vr1
r
v
r2
r
v
r3
r
s
r
m
1 3 2
s
s
r
x
s
c
e
= K
Conjugado
l
Figura 3.5: Representa cao da m aquina de indu cao (assncrona) ligada em Y-Y.
v
s
1
= (2/
3)V
s
cos(
s
t +
v
) + v
0n
(3.58)
v
s
2
= (2/
3)V
s
cos(
s
t +
v
2/3) + v
0n
(3.59)
v
s
3
= (2/
3)V
s
cos(
s
t +
v
+ 2/3) + v
0n
(3.60)
onde
v
e um angulo inicial constante e v
0n
e a tensao entre o neutro da fonte e da
m aquina.
Aplicando-se a matriz de transforma cao P
s
(3.25) obtem-se:
v
g
so
= 0 (3.61)
v
g
sd
=
2V
s
cos(
s
t
g
+
v
) (3.62)
v
g
sq
=
2V
s
sen(
s
t
g
+
v
) (3.63)
Se escolhermos o referencial dq que gira com frequencia
s
(indicado pelo expoente e),
ent ao
g
=
s
t +
o
, onde
o
e um condicao inicial constante, e tem-se:
v
e
so
= 0
v
e
sd
=
2V
s
cos(
v
o
) =
2V
s
cos(
so
)
v
e
sq
=
2V
s
sen(
v
o
) =
2V
s
sen(
so
)
Captulo 3. Modelo da m aquina de corrente alternada 41
A m aquina de indu cao (Y no rotor) possui tens oes rot oricas iguais v
r
r1
= v
r
r2
= v
r
r3
.
Aplicando-se a matriz de transforma cao e considerando-se o modelo homopolar do rotor,
obtem-se que v
e
ro
= 0 e ent ao v
r
r1
= v
r
r2
= v
r
r3
= 0 e v
e
rd
= v
e
rd
= 0.
Introduzindo-se v
e
s
=
1
2
(v
e
sd
+ jv
e
sq
) e v
e
r
= 0, obtem-se o seguinte modelo vetorial:
v
e
s
= V
s
e
j
so
s
= r
s
i
e
s
+
d
e
s
dt
+ j
s
e
s
(3.64)
0 = r
r
i
e
r
+
d
e
r
dt
+ j(
s
r
)
e
r
(3.65)
e
s
= l
s
i
e
s
+ l
m
i
e
r
(3.66)
e
r
= l
r
i
e
r
+ l
m
i
e
s
(3.67)
c
e
= 2l
m
Im(i
e
s
i
e
r
) (3.68)
Regime permanente
No caso particular de regime permanente, como a entrada do sistema e contante
d
e
s
/dt = 0 e d
e
r
/dt = 0 e assim o sistema se simplica para
v
e
s
= V
s
e
j
so
s
= r
s
i
e
s
+ j
s
(l
s
i
e
s
+ l
m
i
e
r
) (3.69)
0 =
r
r
s
i
e
r
+
j(
s
r
)
s
(l
r
i
e
r
+ l
m
i
e
s
) (3.70)
Estas equa coes corresponde ao circuito equivalente da Fig. 3.6, onde s = (
s
r
)/
s
e o escorregamento da m aquina.
i
s
j
s
l
m
r
r
/s
j
s
(l
s
e
v
s
e
l m)
(l l m)
j
s r
r
s
Figura 3.6: Circuito equivalente da M aquina de Indu cao.
3.5.2 Maquina Sncrona
Na Fig. 3.7 e apresentada a m aquina sncrona. O modelo da m aquina sncrona e obtido
utilizando-se (3.58)-(3.60) e com v
r
r1
= V
f
+ v
ml
, v
r
r2
= v
r
r3
= V
f
/2 + v
ml
. Aplicando-se
as matrizes de transforma cao P
s
e P
r
obtem-se:
v
so
= 0
v
g
sd
=
2V
s
cos(
s
t
g
+
v
) (3.71)
v
g
sq
=
2V
s
sen(
s
t
g
+
v
)
v
ro
= 0
v
g
rd
=
2V
f
cos(
r
)
v
g
rq
=
2V
f
sen(
r
)
Captulo 3. Modelo da m aquina de corrente alternada 42
v
s1
s2
s3
s2
s
vs1
s
v
s3
s
i
s2
s
i
s1
s
i
s3
s
s n
s n
s n
s
s
s1
s
s2
s
s3
s
s
s
r
x
s
c
e
= K
Conjugado
s1
r1
r2
r3
i
r3
r
i
r1
r
r n
r
n
r
c
c
e
m
i
r2
r
r
n
v
2m
r
v
3m
r
v
1m
= V
f
V
f
2
=
-
V
f
2
= -
f
2
V
V
f
2
(c) Rotor da Mquina Sncrona
V
f
r3
r
r1
r
r2
r
r
r
vr1
r
v
r2
r
v
r3
r
s
r
(a) Estator da Mquina Sncrona
v
10
s
= Vcos(wst)
v
20
s
v
30
= Vcos(wst-120)
= Vcos(wst+120)
s
0
n
m
1 2 3
-
-
l
Figura 3.7: Representa cao da m aquina sncrona ligada em Y-Y.
onde V
f
=
3
2
V
f
. Note que as tensoes, estatoricas sao semelhantes aquelas da m aquina
de inducao.
Escolhendo-se o mesmo referencial dq que gira com frequencia
s
,
g
=
s
t+
o
, tem-se:
v
e
sd
=
2V
s
cos(
v
o
) =
2V
s
cos(
vo
)
v
e
sq
=
2V
s
sen(
v
o
) =
2V
s
sen(
vo
)
v
g
rd
=
2V
f
cos((
r
s
)t +
o
o
)
v
g
rq
=
2V
f
sen((
r
s
)t +
o
o
)
Introduzindo v
e
s
= V
s
e
j
so
s
e v
e
r
= V
f
e
j((rs)t+oo)
s
obtem-se o seguinte modelo vetorial
v
e
s
= V
s
e
j
so
s
= r
s
i
e
s
+
d
e
s
dt
+ j
s
e
s
(3.72)
v
e
r
= V
f
e
j((rs)t+oo)
s
= r
r
i
e
r
+
d
e
r
dt
+ j(
s
r
)
e
r
(3.73)
e
s
= l
s
i
e
s
+ l
m
i
e
r
(3.74)
e
r
= l
r
i
e
r
+ l
m
i
e
s
(3.75)
c
e
= 2l
m
Im(i
e
s
i
e
r
) (3.76)
Regime permanente
Em regime permanente
s
=
r
, as tens oes dq sao constantes e d
e
s
/dt = 0 e d
e
r
/dt =
0. Assim, obtem-se o seguinte modelo vetorial para o regime permanente
Captulo 3. Modelo da m aquina de corrente alternada 43
v
e
s
= V
s
e
j
so
s
= r
s
i
e
s
+ j
r
(l
s
i
e
s
+ l
m
i
e
r
) (3.77)
v
e
r
= V
f
e
jro
s
= r
r
i
e
r
(3.78)
Para o caso particular do referencial rot orico = (portanto
o
=
o
) e v
e
r
= V
f
e
j((rs)t+oo)
s
=
V
f
. Assim, de (3.78) determina-se diretamente a corrente rot orica i
f
= i
r
r
= V
f
/r e a
rela cao (3.77) torna-se:
v
r
s
= V
s
e
j
so
s
= r
s
i
r
s
+ j
r
(l
s
i
r
s
+ l
m
i
f
) (3.79)
Esta equa cao corresponde ao circuito equivalente da Fig. 3.8, onde E
f
= j
r
l
m
i
f
e a
f.e.m da m aquina.
i
s
j
s
l
s
r
v
s
r
r
s
E
f
+
-
Figura 3.8: Circuito equivalente da M aquina Sncrona.
Captulo 4
Introdu cao ao acionamento com
maquina assncrona
4.1 Introdu cao
Este captulo introduz os sistemas de acionamento est atico com a m aquina assncrona
atraves da discussao dos seus princpios de funcionamento e caractersticas. Tambem,
sao denidos os modelos da m aquina e o sistema de acionamento utilizados nos captulos
subsequentes.
Inicialmente, sao tratados os princpios e as caractersticas de funcionamento da m aquina
assncrona. Em seguida, s ao apresentados modelos din amicos da m aquina assncrona, na
sua versao contnua e discreta. Finalmente, s ao discutidos os subsistemas de alimenta cao
est atica e de medi cao e controle, usualmente empregados nos acionamentos.
4.2 Caractersticas de funcionamento
A m aquina assncrona e uma m aquina de corrente alternada que apresenta caractersticas
bastante apreciadas para a realiza cao de acionamentos est aticos a velocidade vari avel:
robustez, simplicidade de construcao e baixo pre co comparativo com as demais m aquinas.
Existem dois tipos de m aquinas assncronas: de rotor em gaiola e de rotor bobinado. A
versao a rotor bobinado, devido ao sistema de alimenta cao mec anico, e menos popular
que a de rotor em gaiola. Uma caracterstica da maquina assncrona a rotor bobinado e
que ela permite simular uma m aquina universal, com alimenta cao trif asica em ambas as
armaduras rot orica e estatorica.
A velocidade mecanica da m aquina
r
pode ser expressa por:
r
=
r
P
=
s
sr
(4.1)
onde
r
e
sr
sao a velocidade eletrica e a frequencia das correntes rot oricas, respectiva-
mente, e P e o n umero de pares de polos da m aquina.
Segundo (4.1) e possvel variar a velocidade mec anica alterando-se o n umero de pares
de polos. Entretanto, esta n ao e a forma usual de se variar continuamente a velocidade
mecanica da m aquina. Ainda segundo (4.1), a velocidade pode ser modicada variando-se
a frequencia das correntes estat oricas
s
ou a frequencia das correntes rot oricas
sr
.
44
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 45
R
S
T
C
f
MOTOR CA MOTOR CC
CAR GA
R
0
t i mer
v
s1
i
s 1
A/D
PPI
mi crocomput ador
r
1
q
2
q
3
q
s
i
s 1
s
v
s3
i
s3
s
s
s
i
s2
s
i
s3
s
4
q
5
q
6
q
7
q
Figura 4.1: Sistema de acionamento com m aquina assncrona.
Com
s
constante, e possvel variar
sr
diretamente, alimentando o rotor bobinado
com uma fonte de tensao, ou indiretamente, por meio da varia cao da amplitude das tens oes
estatoricas ou modicando-se a resistencia rot orica, no caso da m aquina a rotor bobinado.
Atualmente, a varia cao da velocidade da m aquina, operando com
s
constante, atraves
da varia cao da frequencia rot orica so e utilizada em acionamentos com baixo desempenho
ou em aplica coes de alta potencia. Os sistemas Kramer e Scherbius s ao exemplos deste
ultimo caso. A grande maioria dos acionamentos modernos com m aquina assncrona se
servem da varia cao da frequencia estat orica para o controle da velocidade da m aquina.
A rela cao (4.1) indica que a varia cao do valor de
s
produz uma varia cao de
r
.
Entretanto, esta expressao e insuciente para caracterizar o processo dinamico de evolu cao
de
r
. Para se denir um sistema de controle de velocidade da maquina assncrona e
necessario considerar o modelo din amico completo da m aquina (4.4)-(4.9). Este modelo
e bastante complexo e n ao-linear. Ate poucos anos atr as, as estrategias de controle da
m aquina assncrona eram do tipo escalar e baseadas no modelo da m aquina em regime
permanente. Entretanto, atualmente e possvel controlar a velocidade da maquina com
desempenho din amico excelente, compar avel a din amica da m aquina de corrente contnua,
utilizando estrategias de controle denominadas vetoriais (cf. Captulo 5).
A implementa cao das estrategicas de controle vetorial, mesmo o controle vetorial in-
direto de implementacao simples, e realizada empregando-se microcomputadores. Os
acionamentos utilizam tambem uma fonte trif asica de frequencia e amplitude vari aveis,
com caractersticas mais pr oximas possveis de uma fonte trifasica senoidal. A estrutura
de fonte estatorica mais largamente utilizada nos acionamentos e dada por um inversor
trif asico comandado em PWM, denominado VSI (voltage source inverter).
Na gura 4.1 e apresentado o diagrama de blocos simplicado do sistema de aciona-
mento considerado neste trabalho. Trata-se de um sistema padr ao para acionamento com
m aquina de corrente alternada. A maquina assncrona e acoplada a uma m aquina CC que
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 46
constitui, neste caso, a carga mec anica. A alimenta cao da m aquina e fornecida por um
inversor trif asico, usando chaves com abertura e fechamento comandados (transistores
bipolares, igbts, gtos, etc). O sinal de comando para o inversor e gerado utilizando-se
uma tecnica PWM. A aquisicao das vari aveis, o controle e o comando do sistema de
acionamento s ao realizados por um microcomputador dotado de placas dedicadas com
conversores A/D e temporizadores programaveis (timers).
Doravante, a velocidade da m aquina ser a referida atraves da sua velocidade eletrica
r
. Nas secoes seguintes ser ao discutidos com mais detalhes o sistema de acionamento
com m aquina assncrona.
4.3 Modelos dinamicos da maquina assncrona
A m aquina assncrona foi apresentada no captulo anterior. Ela e constituda de uma ar-
madura trif asica estat orica e uma armadura rot orica separadas por um angulo
r
(veja a
gura 4.2a). Cada armadura e composta por tres bobinas identicas com eixos magneticos
defasados de 120
o
eletricos. A armadura rot orica gira a velocidade eletrica
r
= d
r
/dt.
Devido a constru cao particular das bobinas, o uxo criado nelas possui distribui cao
senoidal a partir do seu eixo magnetico. O entreferro da m aquina e uniforme, de modo
que o uxo m utuo entre as bobinas de uma mesma armadura n ao depende do angulo
r
.
Entretanto, devido a distribui cao senoidal de uxo, o uxo m utuo entre as bobinas de ar-
maduras distintas s ao fun cao do cosseno de
r
e varia continuamente. A varia cao do uxo
m utuo estator-rotor com o cosseno de
r
leva a um modelo eletrico da maquina trif asica
com par ametros vari aveis: as indut ancias m utuas estator-rotor fun cao de cossenos de
r
.
Devido a esta caracterstica, o modelo trif asico n ao e utilizado para o estudo din amico da
m aquina assncrona.
4.3.1 Modelos dinamicos contnuos
Conforme apresentado no captulo anterior o modelo odq utilizado para a caracteriza cao
da m aquina e derivado do modelo trif asico por meio de uma transforma cao de base
x
s123
= P(
g
)x
sodq
; x
r123
= P(
g
r
)x
rodq
(4.2)
Em (4.2) x
s123
representa genericamente as variaveis estat oricas trif asicas (corrente, tens ao
ou uxo) e x
sodq
representa as vari aveis equivalentes na nova base odq. x
r123
e x
rodq
sao
as vari aveis rot oricas equivalentes. P(
g
) e P(
g
r
) sao as matrizes de transforma cao
para o estator e rotor, respectivamente, e
g
e um angulo transforma cao generico, fun cao
da escolha particular da base odq.
Genericamente a matriz P(
p
), na forma conservativa de potencia, e dada por [1]
P(
p
) =
_
2/3
1/
2 cos(
p
) sen(
p
)
1/
2 cos(
p
2/3) sen(
p
2/3)
1/
2 cos(
p
+ 2/3) sen(
p
+ 2/3)
(4.3)
onde
p
e um angulo de transformacao generico:
p
=
g
para as grandezas estat oricas e
p
=
g
r
para as grandezas rot oricas.
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 47
v
s1
s2
s3
r1
r2
r3
s2
s
v
s1
s
v
s3
s
i
s2
s
i
s1
s
i
s3
s
v
r
r
i
r2
r
v
r1
r
v
r3
r
i
r3
r
i
r1
r
s
n
s
n
s
n
r
n
r
n
r
n
r
(a)
q
v
sd
g
(b)
i
sd
g
v
rq
g
d
s1
g
v
rd
g
i
rd
g
v
sq
g
i
rq
g
s
P
-1
s
P
i
sq
g
r
P
-1
P
r
i
so
so
v
+
-
so
i
ro
ro
v
+ -
ro
so
ro
g
Figura 4.2: Diagrama representativo da m aquina trif asica (a) e dq (b).
Utilizando-se a representacao odq obtem-se um novo modelo com par ametros eletricos
constantes. A parte do modelo envolvendo as vari aveis de ndice o, denominada homopo-
lar, e totalmente desacoplada da vari aveis de ndices dq. Ademais, ela representa apenas
a contribui cao da parcela das vari aveis trif asicas identicas nas tres fases. Se as bobinas
trif asicas da m aquina sao ligadas em estrela sem conex ao do neutro, a soma das cor-
rentes das tres fases da maquina e nula e a corrente homopolar, que e proporcional a
soma das correntes trifasicas, tambem e nula. Assumindo-se a m aquina simetrica, o mod-
elo din amico homopolar e dado por uma bobina linear isolada, assim obtem-se tambem
tensoes e uxos homopolares nulos. Tambem, se a m aquina simetrica e ligada em delta
ent ao os componentes homopolares s ao nulos. Nestes casos, a m aquina trif asica pode ser
representada apenas pelas vari aveis dq.
No que concerne a rela cao uxo-corrente, o modelo dq pode ser interpretado como
sendo uma m aquina bif asica com dois eixos magneticos solid arios e ortogonais d e q (Fig.
4.2b). Em cada eixo localiza-se uma bobina estatorica e outra rot orica. A ortogonalidade
entre estes eixos e a distribuicao senoidal de uxo implica que os uxos m utuos entre os
dois eixos s ao nulos. A transforma cao de base ou de referencial introduz uma mudan ca
na posi cao inicial de pelo menos uma das armaduras trif asicas, que originalmente em
trif asico possuiam velocidade relativa diferente de zero. Assim, apesar dos uxos das
bobinas de eixos d e q serem completamente desacoplados, existe um acoplamento no
modelo de tens ao em funcao das correntes e/ou dos uxos. O uxo ou a corrente de um
eixo contribui para a tensao de outro eixo. Este efeito e semelhante ao encontrado na
m aquina de corrente contnua, onde os uxos de armadura e de excita cao s o dependem
das suas pr oprias correntes, mas o modelo de tensao para o circuito de armadura depende
da corrente de excita cao (devido a fcem e
a
, que depende da excita cao). A representa cao
dq realiza funcao semelhante a do comutador numa m aquina de corrente contnua.
E possvel ainda representar as vari aveis dq em termo dos seus vetores resultantes.
Esta representacao permite escrever um modelo extremamente resumido para a m aquina
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 48
e visualiza-la atraves dos vetores resultantes. Assumindo-se que a m aquina assncrona e
simetrica, livre de satura cao e com distribui cao senoidal de uxo, ela pode ser representada
por um modelo vetorial em um referencial generico, indicado pelo expoente g, conforme
derivado no captulo anterior:
v
g
s
= r
s
i
g
s
+
d
g
s
dt
+ j
g
g
s
(4.4)
0 = r
r
i
g
r
+
d
g
r
dt
+ j(
g
r
)
g
r
(4.5)
g
s
= l
s
i
g
s
+ l
m
i
g
r
(4.6)
g
r
= l
r
i
g
r
+ l
m
i
g
s
(4.7)
P(c
e
c
m
) = J
d
r
dt
+ F
r
(4.8)
c
e
= Pi
s
s
sen(
i
a
) = P
l
m
l
r
i
s
r
sen(
i
b
) (4.9)
As variaveis e par ametros relacionados a este modelo s ao denidas como se segue:
j =
1
v
g
s
= v
g
sd
+ jv
g
sq
: vetor tens ao estat orica num referencial arbitr ario g
v
s
s
= v
s
sd
+ jv
s
sq
: vetor tens ao estat orica no referencial estat orico s
v
a
s
= v
a
sd
+ jv
a
sq
: vetor tens ao estat orica no referencial uxo estat orico a
i
g
s
= i
g
sd
+ ji
g
sq
: vetor corrente estatorica num referencial arbitr ario g
i
i
s
= i
s
+ j0: corrente estat orica no referencial corrente estatorica i
i
s
s
= i
s
sd
+ ji
s
sq
: vetor corrente estatorica no referencial estat orico s
i
r
s
= i
r
sd
+ ji
r
sq
: vetor corrente estatorica no referencial rot orico r
i
a
s
= i
a
sd
+ ji
a
sq
: vetor corrente estatorica no referencial uxo estat orico a
i
b
s
= i
b
sd
+ ji
b
sq
: vetor corrente estatorica no referencial uxo rot orico b
g
s
=
g
sd
+ j
g
sq
: vetor uxo estat orico num referencial arbitr ario g
a
s
=
s
+ j0: uxo estat orico no referencial uxo estat orico a
s
s
=
s
sd
+ j
s
sq
: vetor uxo estat orico no referencial estat orico s
g
r
=
g
rd
+ j
g
rq
: vetor uxo rot orico num referencial arbitr ario g
b
r
=
r
+ j0: uxo rot orico no referencial uxo rot orico b
s
r
=
s
rd
+ j
s
rq
: vetor uxo rot orico no referencial estat orico s
r
r
=
r
rd
+ j
r
rq
: vetor uxo rot orico no referencial rot orico r
a
r
=
a
rd
+ j
a
rq
: vetor uxo rot orico no referencial uxo estat orico a
g
: frequencia de rota cao do referencial arbitr ario
r
: frequencia de rota cao do rotor
v
: frequencia de rota cao do vetor tens ao estat orica
i
: frequencia de rota cao do vetor corrente estat orica
a
: frequencia de rota cao do vetor uxo estat orico
b
: frequencia de rota cao do vetor uxo rot orico
ar
=
a
r
: frequencia de escorregamento do vetor uxo estatorico
br
=
b
r
: frequencia de escorregamento do vetor uxo rotorico
g
: posi cao angular do referencial arbitr ario
r
: posi cao angular do eixo magnetico do rotor
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 49
g
a
r
v
s
s i
s
s
r
s
v
i
r
r
1
s
1
s
b
a
d
s
s
Figura 4.3: Diagrama vetorial instant aneo da m aquina.
v
: posi cao angular do vetor tens ao estat orica
i
: posi cao angular do vetor corrente estat orica
a
: posi cao angular do vetor uxo estat orico
b
: posi cao angular do vetor uxo rot orico
c
e
: conjugado eletromagnetico
c
m
: conjugado mec anico
l
s
: indutancia cclica estat orica
l
r
: indutancia cclica rot orica
l
m
: indutancia cclica m utua
r
s
: resistencia ohmica estat orica
r
r
: resistencia ohmica rot orica
J: momento de inercia
F: coeciente de atrito
P: n umero de pares de polos
Na gura 4.3 e apresentado o diagrama vetorial instant aneo dos vetores tensao es-
tat orica (v
s
s
), corrente estat orica (i
s
s
), uxo estat orico (
s
s
) e uxo rot orico (
s
r
) da m aquina,
vistos do referencial estat orico (fase s
1
). Tambem, neste diagrama s ao indicados o eixo
magnetico rot orico (fase r
1
) e o eixo d.
A divis ao da m aquina em partes eletrica, (4.4)-(4.7), e mec anica (4.8) e possvel, j a
que a evolu cao din amica da velocidade e, em geral, bem mais lenta que a evolu cao das
vari aveis eletricas. Este desacoplamento permite representar a m aquina por meio de um
modelo eletrico linear variante no tempo, (4.4)-(4.7), onde a velocidade
r
comporta-se
como um parametro vari avel.
Do modelo eletrico (4.4)-(4.7), observa-se que existem quatro variaveis de estado e
apenas duas equa coes diferenciais, (4.4) e (4.5). A utiliza cao das rela coes de liga cao (4.6)
e (4.7) permite eliminar as duas vari aveis de estado excedentes, obtendo-se um sistema
de estado determinado. Tres exemplos de modelos particulares foram selecionados. O
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 50
primeiro modelo utiliza os uxos como vari aveis de estado, denominado modelo a. O se-
gundo modelo tem a corrente estat orica e o uxo rot orico como vari aveis de estado, modelo
b. O terceiro modelo utiliza a corrente estat orica e a corrente de magnetiza cao rot orica
(i
g
rm
=
g
r
/l
m
) como vari aveis de estado, modelo c. Estes modelos sao apresentados em
seguida:
Modelo a: uxo estat orico - uxo rot orico
Substituindo-se em (4.4) e (4.5) as corrente em fun cao dos uxos, obtidos de (4.6) e
(4.7), tem-se:
v
g
s
=
r
s
l
s
g
s
+
d
g
s
dt
+ j
g
g
s
l
m
r
s
l
s
l
r
g
r
(4.10)
0 =
r
r
l
s
g
r
+
d
g
r
dt
+ j(
g
r
)
g
r
l
m
l
s
g
s
(4.11)
c
e
= P
l
m
l
s
l
r
r
sen(
a
b
) (4.12)
Onde
r
= l
r
/r
r
e = 1 l
2
m
/(l
s
l
r
) sao as constante de tempo rot orica e o coeciente de
dispersao da m aquina, respectivamente.
Modelo b: corrente estat orica - uxo rot orico
Substituindo-se em (4.10)-(4.12) o uxo estat orico em funcao do uxo rot orico e da
corrente estat orica, obtidos de (4.6) e (4.7), tem-se:
v
g
s
= (r
s
+
r
r
l
2
m
l
2
r
)i
g
s
+ l
s
di
g
s
dt
+ j
g
l
s
i
g
s
+ (j
r
r
)
l
m
l
r
g
r
(4.13)
0 =
1
g
r
+
d
g
r
dt
+ j(
g
r
)
g
r
l
m
r
i
g
s
(4.14)
c
e
= P
l
m
l
r
i
s
r
sen(
i
b
) (4.15)
Modelo c: corrente estat orica - corrente de magnetiza cao rot orica
Este modelo e derivado diretamente de (4.13)-(4.15), substituindo-se o uxo rot orico
pela corrente de magnetiza cao rot orica i
g
rm
=
g
r
/l
m
, e utilizando o conjunto de par ametros
basicos r
s
,
r
, l
s
e l
s
. Ele e dado por
v
g
s
= (r
s
+
l
s
l
s
r
)i
g
s
+ l
s
di
g
s
dt
+ j
g
l
s
i
g
s
+ (j
r
r
)(l
s
l
s
)i
g
rm
(4.16)
0 =
1
r
i
g
rm
+
di
g
rm
dt
+ j(
g
r
)i
g
rm
r
i
g
s
(4.17)
c
e
= P(l
s
l
s
)i
s
i
rm
sen(
i
b
) (4.18)
Os modelos anteriores podem ser escritos genericamente na forma de estado, como se
segue:
dx
g
(t)
dt
= A
g
x
g
(t) + B
g
v
g
s
(t) (4.19)
onde x
g
e o vetor de estado e A
g
e B
g
sao as matrizes de estado e de entrada no referencial
generico.
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 51
4.3.2 Modelos dinamicos discretos
Os modelos da m aquina podem ser representados tambem na sua versao discreta. Aqui
utilizou-se modelos din amicos discretos com os operadores q, shift operador [2] e [3].
Sendo h o perodo de amostragem, dene-se os operadores por:
qx(t) = x(t + h) (4.20)
x(t) =
x(t + h) x(t)
h
(4.21)
Observa-se que o operador pode ser visto como um derivador das vari aveis discretas.
A partir de (4.20) e (4.21) escreve-se a rela cao entre os operadores e q:
=
q 1
h
(4.22)
Os modelos discretos com o operador , para perodos de amostragen pequenos, sao
geralmente mais bem condicionado que os modelos com o operador q. Tambem, eles
convergem para os modelos contnuos quando h tende para zero, o que n ao ocorre com os
modelos com o operador q.
Os modelos discretos s ao deduzidos assumindo-se que durante o intervalo de amostragem
h o vetor tens ao estat orica e a velocidade angular da m aquina
r
sao mantidas constantes.
Estas consideracoes decorrem de dois fatos: a tens ao e aplicada ` a m aquina por meio de
um segurador de primeira ordem e a constante de tempo mec anica e muito superior as
constantes de tempo eletricas. Considerando-se o modelo de estado contnuo em (4.19),
obtem-se os seguintes modelos de estado discretos:
Operador q:
qx
g
(t) = F
g
q
x(t) + H
g
q
v
g
s
(t) (4.23)
com
F
g
q
= I
2
+ A
g
h +
A
g2
h
2
2!
+
A
g3
h
3
3!
+ .... (4.24)
H
g
q
= (I
2
+
A
g
h
2!
+
A
g2
h
2
3!
+
A
g3
h
3
4!
+ ....)B
g
h (4.25)
onde I
2
e a matriz identidade de ordem 2.
Operador :
x
g
(t) = F
g
x(t) + H
g
v
g
s
(t) (4.26)
com
F
g
= A
g
+
A
g2
h
2!
+
A
g3
h
2
3!
+
A
g4
h
3
4!
+ .... (4.27)
H
g
= (I
2
+
A
g
h
2!
+
A
g2
h
2
3!
+
A
g3
h
3
4!
+ ....)B
g
(4.28)
Utilizando-se (4.22), obtem-se que F
g
= (F
g
q
I
2
)/h e H
g
= H
g
q
/h. Estas rela coes
permitem calcular as matrizes F
g
e H
g
a partir das respectivas matrizes em q. Entretanto,
calcular F
e H
desta forma e, em geral, mal condicionado numericamente.
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 52
4.3.3 Modelo mecanica de movimento
O movimento de rotacao mec anico do rotor da m aquina e expresso pela mesma equa cao
de movimento apresentada no captulo 2, ou seja,
c
e
c
m
F
m
r
= J
m
d
r
dt
(4.29)
4.4 Fonte de alimenta cao estatica
A m aquina assncrona em acionamentos com velocidade vari avel deve ser alimentada por
meio de uma fonte de tens ao trif asica de frequencia e amplitude vari aveis. Esta fonte de
tensao e obtida por meio de conversores est aticos de potencia. A partir de um sistema de
alimentacao trif asico, existem duas topologias b asicas para a realiza cao da fonte est atica:
alimentacao direta e alimenta cao indireta com est agio intermedi ario. Os cicloconversores
constituem os exemplos mais classicos de conversores direto. Os conversores indiretos s ao
os mais utilizados.
O est agio intermedi ario do conversor indireto pode ser de corrente ou tens ao. O est agio
intermedi ario pode ser do tipo barramento pulsado, para possibiliotar a redu cao das per-
das de comuta cao. O conversor indireto mais amplamente utilizado em acionamentos
utiliza um est agio de tens ao contnua, mostrado na gura 4.1. Ele e composto por um
reticador, um ltro capacitivo, um chaveador (chaves q
7
e resistencia R
0
), para dissipa cao
da energia devolvida pela m aquina nas desacelera coes, e um inversor de tensao.
O inversor de tensao pode ser realizado ainda em outras vers oes. Por exemplo, uma
versao econ omica com dois bra cos [4] e outra com um nveis de tensao suplementares,
inversor de multinveis, que utiliza chaves semicondutoras e diodos suplementares [5].
O inversor da gura 4.1 gera seis vetores tens ao n ao-nulos e dois nulos (cf. Captulo
7). O inversor a dois bra cos gera quatro vetores tens ao n ao-nulos. Enquanto o inversor
de tres nveis gera 16 vetores tens ao n ao-nulos e tres nulos. O conversor de tres nveis
permite alimentar a maquina com distor cao harm onica menor que o da gura 4.1, ao pre co
de uma maior complexidade. J a o inversor a dois bra cos introduz distor cao harm onica
maior que o inversor da gura 4.1, para baixos ndices de modula cao, mas possui uma
implementa cao mais econ omica.
Conforme mencionado, qualquer dos inversores citados s o permite gerar vetores tens ao
discretos. Entretanto, o acionamento da maquina requer tensoes trif asicas de alimentacao,
ou vetores equivalentes, que variam continuamente em amplitude, frequencia e posicao.
Usualmente, utiliza-se uma tecnica de modula cao de largura de pulso (PWM) para obter,
em termos medios, a tensao de alimenta cao da m aquina requerida. A modula cao PWM
sera discutida em detalhes no Captulo 7.
O inversor trif asico utilizado neste trabalho, gura 4.1, pode empregar transistores de
potencia bipolares, Igbts, Gtos, etc. O isolamento dos drives dos circuitos de base e
assegurado por meio de acopladores oticos de alta velocidade.
O reticador na entrada do sistema, respons avel pela obten cao da tens ao do barra-
mento CC, na gura 4.1 e realizado por meio de uma ponte a diodo, portanto a tens ao CC
nao e controlada. Entretanto, e possvel realizar a retica cao utilizando uma estrutura de
Captulo 4. Introdu cao ao acionamento com m aquina assncrona 53
conversor identica ao do inversor trif asico. Neste caso, pode-se impor correntes senoidais
e fator de potencia unit ario na entrada do sistema.
4.5 Sistema de aquisi cao e controle
Os sistemas modernos de acionamento s ao controlados utilizando um conjunto de medi cao,
processamento e comando composto de um sistema digital e sensores.
Os sensores usualmente utilizados s ao os de correntes estatorica e de velocidade ou
posi cao. Mais recentemente vem sendo utilizados tambem sensores para a tensao es-
tat orica, importantes na realiza cao de fun coes de estima cao e controle que necessitam da
informa cao precisa da tens ao. A tendencia em acionamentos de alto desempenho e a uti-
liza cao apenas dos sensores de corrente e tens ao e a elimina cao dos sensores de grandezas
mecanicas.
A solu cao digital e imperativa para sistemas de acionamento com controle vetoriais de
alto desempenho. Mas, mesmo nos casos de sistemas de acionamento mais simples, ela
apresenta tambem vantagens sobre a alternativa anal ogica. As funcoes de aquisi cao, pro-
cessamento e comando s ao realizadas por um sistema digital utilizando um processador
digital com placa de aquisi cao e comando dos conversores est aticos. Os processadores digi-
tais mais empregados s ao os microprocessadores de prop osito geral, os microcontroladores
e os processadores digital de sinal (DSP). A escolha do processador depende principal-
mente da complexidade do algoritmo de controle e estima cao e do perodo de amostragem
requeridos. A placa de aquisi cao e comando deve possuir conversores A/D (p. ex., para a
medicao de corrente e tensao), portas paralelas, (p. ex., para a medi cao da posi cao ou ve-
locidade mec anica e comando do chaveador de dissipa cao) e temporizadores program aveis
(para a gera cao do padr ao PWM de comando do inversor).
Nos resultados experimentais apresentados neste texto, a aquisi cao das vari aveis, o
controle, a estimacao e o comando do sistema de acionamento s ao assegurados por um
microcomputador Pentium, com placas dedicadas com conversores A/D e temporizadores
program aveis. Os sinais de corrente e tensao estat oricas sao medidos por meio de sensores
a efeito Hall. Antes da convers ao A/D, estes sinais s ao ltrados por meio de ltros
de antialiasing anal ogicos. A velocidade e calculada a partir da medi cao da posi cao
mecanica, medida por meio de um captor de posi cao absoluto de 9bits ou 11bits.
Captulo 5
Controle de uxo e conjugado da
maquina assncrona
5.1 Introdu cao
Os sistemas de acionamento est atico que empregam m aquinas assncronas s ao mecanica-
mente robustos, mas sua analise e complexa pois requer o estudo de um sistema multi-
vari avel e n ao linear. Os primeiros esquemas de acionamentos com m aquina assncrona
eram do tipo escalar e baseados em modelos de regime permanente, tal como o Volts/Hertz
[6], apresentando fraco desempenho dinamico. No intuito de desenvolver sistemas de
acionamento de alto desempenho, tem sido investigadas estrategias de controle que asse-
gurem o desacoplamento entre o controle do uxo e do conjugado. A utiliza cao de tecnicas
genericas de desacoplamento de sistemas, tal como proposta em Falb e Wolovich [7], ou
baseadas em modelos escalares, como proposto por Bose [8], levam em geral a solu coes
pouco ecazes e eventualmente complexas.
Entretanto, e possvel obter este desacoplamento utilizando abordagens ditas vetoriais,
p. ex., controlando o uxo rot orico da m aquina pela componente da corrente estatorica
em fase com o uxo e o conjugado eletromagnetico por meio da componente da corrente
estatorica ortogonal ou em quadratura com o uxo, denominado controle por orienta cao
pelo campo [9].
Outros exemplos de estrategias de controle da maquina assncrona de alto desempenho
dinamico foram propostos por Takahashi [10], Rossi [11], Habetler e Divan [12] e Lima
[13] baseados no controle da amplitude e da frequencia do uxo estat orico.
A escolha das vari aveis de estado, das vari aveis de comando e da localiza cao do sistema
de eixos de referencia permite estabelecer uma classica cao generica para as estrategias de
controle da maquina assncrona. Na classica cao utilizada aqui, as estrategias de controle
sao agrupadas em duas categorias denominadas controle por escorregamento e controle
em quadratura.
Neste texto v arias estrategias de controle da maquina assncrona s ao discutidas e
classicadas em uma destas categorias. Apesar de nao se discutir todas as estrategias
possveis, a formulacao e a classica cao adotadas s ao sucientemente genericas e incluem
tanto os controles cl assicos, quanto os modernos de alto desempenho. Algumas estrategias
nao discutidas explicitamente neste texto, como por exemplo as apresentadas em [10], [11],
54
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 55
[12], podem ser classicadas como do tipo controle por escorregamento.
As estrategias de controle apresentadas nesta classica cao s ao estudadas e compara-
das com o controle por orienta cao pelo campo. A complexidade computacional da imple-
menta cao delas por microcomputador e avaliada. Esta avalia cao permite estimar o tempo
de processamento necess ario `a execu cao das tarefas de aquisi cao, controle e comando.
O diagrama de blocos simplicado do sistema de acionamento considerado neste
captulo e o mesmo apresentado previamente na gura 4.1.
5.2 Estrategias de controle
De modo generico, as estrategias de controle de uxo e conjugado podem ser classicadas
como estrategias escalares ou vetoriais. Nas estrategias escalares controlam-se simultanea-
mente a amplitude e a freq uencia da grandeza. No caso das estrategias vetoriais o controle
e feito por meio dos valores da amplitude e da fase ou das componentes dq da grandeza.
As estrategias podem ser classicadas de acordo com o uxo escolhido para a excita cao
magnetica da m aquina e de acordo com o tipo de vari avel empregada no controle do con-
jugado eletromagnetico. A excita cao magnetica pode ser feita atraves do uxo estatorico,
do uxo rot orico ou do uxo de entreferro. O conjugado eletromagnetico pode ser contro-
lado atraves da frequencia de escorregamento da vari avel escolhida para excitar a m aquina
(controle por escorregamento), ou pela componente de uma segunda vari avel, vari avel de
conjugado, em quadratura com a vari avel de excita cao (controle em quadratura).
O conjugado eletromagnetico de uma maquina assncrona pode ser expresso generica-
mente como:
c
e
= k
1
2
1
1r
(5.1)
Na equa cao (5.1) k
1
depende dos parametros da m aquina,
1
e a amplitude do uxo
escolhida e
1r
=
1
r
e a frequencia de escorregamento do vetor uxo escolhido.
Quando o uxo utilizado e o uxo rot orico, esta express ao e exata e vale tambem durante
os regimes transit orios da m aquina. Quando o uxo utilizado e o uxo estat orico ou o de
entreferro, esta expressao e aproximada e e v alida apenas em regime permanente [14]. O
controle por escorregamento e baseado na equa cao (5.1): controla-se a amplitude do uxo
1
, normalmente num valor constante (exceto nos casos de enfraquecimento de campo e
otimiza cao da eciencia da m aquina), e o escorregamento
1r
e utilizado para o controle
do conjugado.
O conjugado eletromagnetico da m aquina assncrona pode ainda ser expresso generi-
camente pelo modulo do produto vetorial de duas grandezas vetoriais de estado quaisquer
da m aquina (x
g
1
e x
g
2
):
c
e
= k
12
x
1
x
2
sen(
21
) (5.2)
Na equa cao (5.2) x
1
e x
2
sao as amplitudes dos vetores x
g
1
e x
g
2
,
21
e o angulo entre
os vetores e k
12
e uma constante. As grandezas x
g
1
e x
g
2
podem ser escolhidas por exemplo
como uxo-uxo ou uxo-corrente. O controle em quadratura e baseado na equa cao
(5.2). Supondo que x
g
1
e a vari avel de excita cao magnetica, x
1
e controlada em um valor
normalmente constante, e o conjugado eletromagnetico da m aquina e controlado atraves
de x
2
sen(
21
), componente de x
g
2
em quadratura com x
g
1
.
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 56
As estrategias de controle podem ser implementadas na forma direta ou indireta. No
controle direto, existe uma malha fechada de controle do uxo. No controle indireto,
o uxo e controlado sem realimenta cao (feedforward). O sinal de realimenta cao do
uxo e obtido diretamente atraves de sensores de uxo [15] ou estimado utilizando-se um
observador de estados em malha fechada [13], [16] ou ainda estimado em malha aberta
[17].
A estrategia de controle por quadratura e eminentemente do tipo vetorial. J a a es-
trategia de controle por escorregamento pode ser implementada tambem na forma escalar,
pois e baseada no controle da amplitude e da frequencia de escorregamento do uxo.
A estrategia de controle em quadratura utiliza normalmente controladores no referen-
cial de uxo a ser controlado. Entretanto, no controle por escorregamento o referencial
para implementa cao dos controladores pode ser qualquer.
Em seguida sao apresentadas e classicadas algumas estrategias de controle da maquina
assncrona com os uxos estat oricos e rot oricos.
5.3 Controle por escorregamento
5.3.1 Controle por escorregamento com o uxo rot orico
Utilizando as equa coes (4.5) e (4.7) pode-se escrever a seguinte equa cao din amica, relacionando-
se o uxo rotorico e a corrente estat orica:
l
m
r
i
g
s
=
1
g
r
+
d
g
r
dt
+ j(
g
r
)
g
r
(5.3)
onde
r
= l
r
/r
r
e a constante de tempo rot orica. Considerando-se a equa cao (5.3) com o
eixo d alinhado com o vetor uxo rot orico
b
r
(
b
rd
=
r
,
b
rq
= 0 e
g
=
b
) e utilizando
a equa cao (4.9), obtem-se a seguinte express ao para o conjugado eletromagnetico:
c
e
= P
2
r
r
r
br
(5.4)
A equa cao (5.4) mostra que o conjugado eletromagnetico pode ser controlado atraves de
br
, com
r
sendo controlado no nvel do uxo desejado.
Controle vetorial direto
Este tipo de controle de uxo e conjugado e obtido controlando-se diretamente o vetor
uxo rot orico. Neste caso, o vetor uxo de referencia e dado por:
s
r
=
r
e
j
b
(5.5)
b
=
_
t
0
br
()d +
_
t
0
r
()d (5.6)
O vetor uxo rot orico na equa cao (5.5) tem como componentes:
s
rd
=
r
cos(
b
) e
s
rq
=
r
sen(
b
). Ao longo de todo o texto ser a empregado o smbolo
em expoente para
indicar os valores de referencia.
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 57
E possvel utilizar as tens oes estat oricas v
s
sd
e v
s
sq
para comandar diretamente a m aquina
e controlar o uxo rot orico. Entretanto, obtem-se modelos dinamicos mais apropriados
para uma abordagem SISO utilizando a corrente como vari avel de comando. Isto implica
na necessidade de se utilizar uma malha interna de controle de corrente.
O modelo din amico de controle do uxo rot orico, com a corrente estat orica como
vari avel de comando, e dado pela equa cao (5.3). Esta estrategia de controle pode ser
realizada num referencial qualquer. O referencial rot orico e escolhido porque neste caso
elimina-se o acoplamento entre os componentes dq do uxo, simplicando o projeto dos
controladores. Assim, escolhendo-se o referencial rot orico (
g
=
r
, donde
g
=
r
) em
(5.3), obtem-se as equacoes din amicas uxo-corrente em termos das componentes dq:
l
m
r
i
r
sd
=
1
r
rd
+
d
r
rd
dt
(5.7)
l
m
r
i
r
sq
=
1
r
rq
+
d
r
rq
dt
(5.8)
Utilizando as equa coes (5.7) e (5.8), o controle de uxo pode ser realizado atraves
de dois controladores independentes, um para cada componente dq. Os sinais de sada
dos controladores de uxo s ao as componentes da corrente de referencia no referencial
rot orico. A corrente de referencia no referencial estat orico (
g
= 0, donde
g
= 0) e
obtida por meio de uma transforma cao de coordenadas.
O diagrama de blocos deste esquema de controle e mostrado na gura 5.1. Os blocos
indicados por
r
r
, R
r
e e
jr
representam o gerador de referencia dos uxos dq, os contro-
ladores do uxo rot orico e o transformador de coordenadas (i
s
s
= i
r
s
e
jr
, ou as equa coes
(5.9) e (5.10) quando utiliza-se os componentes dq), respectivamente. O bloco estimador
de uxo permite a obten cao do uxo rot orico a partir da medi cao das vari aveis terminais
da m aquina. O controlador de corrente estat orica FC e o mesmo utilizado na gura 5.4,
ele sera discutido na se cao de controle de corrente. No bloco divisor o numerador e a
vari avel da seta horizontal e o denominador e a vari avel da seta vertical.
Os sinais de referencia do uxo rot orico (
r
rd
=
r
cos(
br
) e
r
rq
=
r
sen(
br
) ) tem a
mesma amplitude
r
e frequencia
br
= d
br
/dt. Observa-se que esta estrategia e do tipo
vetorial pois as componentes dq sao individualmente controlados.
Controle indireto
E possvel denir estrategias de controle com o vetor uxo em malha aberta. De fato,
assumindo condi coes de regime permanente, (d
r
rd
/dt =
br
r
rq
e d
r
rq
/dt =
br
r
rd
),
pode-se controlar
r
r
gerando correntes de referencia, em coordenadas estat oricas, como
se segue:
i
s
sd
= i
r
sd
cos(
r
) i
r
sq
sen(
r
) (5.9)
i
s
sq
= i
r
sq
cos(
r
) + i
r
sd
sen(
r
) (5.10)
Onde tem-se:
i
r
sd
=
r
rd
l
m
r
l
m
br
r
rq
(5.11)
i
r
sq
=
r
rq
l
m
+
r
l
m
br
r
rd
(5.12)
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 58
MA
FC
VSI
+
*
sq
i
*
sq
i
*
s
R
e
j
r
de fluxo
Estimador
c
e
*
sd
i
*
sd
i
*
s
i
s
s
v
s
s
r
R
r
r
r
P
+
br
*
*
r
r
rd
rq
*
r
*
r
rd
r
r
rq
r
r
r
r
2
+
Figura 5.1: Diagrama de blocos do esquema vetorial direto por escorregamento com o
uxo rot orico no referencial rot orico.
r
rd
=
r
cos(
br
) (5.13)
r
rq
=
r
sen(
br
) (5.14)
br
=
_
t
0
br
()d (5.15)
Este controle e semelhante ao controle vetorial por orienta cao pelo campo rot orico
indireto deduzido mais a frente, dado pela equa coes (5.39)-(5.42).
E possvel ainda denir o controle escalar por escorregamento com o uxo rot orico
[18]. Neste caso, e imposta ` a m aquina uma corrente estat orica, no referencial estatorico,
de amplitude, obtida de (5.11) e (5.12), e frequencia dadas por:
i
s
=
r
l
m
_
1 +
2
r
2
br
(5.16)
b
=
br
+
r
(5.17)
5.3.2 Controle por escorregamento com uxo estat orico
Em regime permanente o conjugado eletromagnetico da m aquina assncrona pode ser
calculado usando as equa coes (4.5),(4.6), (4.7) e (4.9), obtendo-se:
c
e
=
Pl
2
m
r
r
l
2
s
ar
1 + (
ar
r
)
2
2
s
(5.18)
onde = 1 l
2
m
/(l
s
l
r
) e o coeciente de dispersao.
Para pequenos valores de escorregamento e abaixo do valor de pull-out esta express ao
pode ser aproximada por:
c
e
=
Pl
2
m
ar
2
s
r
r
l
2
s
(5.19)
Mais informa coes sobre express oes em que se considera o regime dinamico podem ser
encontradas em [13], [14], [10], [19].
Segundo a equa cao (5.19), nota-se que c
e
pode ser controlado atraves de
ar
, desde
que
s
seja mantido constante.
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 59
Controle vetorial direto
No caso da estrategia de malha fechada o controle do conjugado e do uxo e obtido
diretamente atraves do vetor uxo estatorico. O vetor uxo estat orico de referencia e
dado por:
s
s
=
s
e
j
a
(5.20)
a
=
_
t
0
ar
()d +
_
t
0
r
()d (5.21)
O controle do vetor uxo estat orico pode ser baseado diretamente na equa cao (4.4)
com o termo da queda de tens ao resistiva tomado como perturba cao a ser compensada.
Todavia, o modelo din amico utilizado aqui e obtido da equa cao (4.4) substituindo-se a
corrente estat orica em termo dos uxos rot orico e estatorico, resultando o seguinte modelo:
v
s
s
=
r
s
l
s
g
s
+
d
g
s
dt
+ j
g
g
s
l
m
r
s
l
s
l
r
g
r
(5.22)
De acordo com a equa cao (5.22), a estrategia de controle do uxo estat orico pode
ser implementada num referencial arbitr ario. Neste estudo optou-se pelo referencial es-
tat orico, evitando-se o acoplamento entre as componentes dq. Neste caso, tem-se as
seguintes equa coes din amicas:
v
s
sd
=
r
s
l
s
s
sd
+
d
s
sd
dt
l
m
r
s
l
s
l
r
s
rd
(5.23)
v
s
sq
=
r
s
l
s
s
sq
+
d
s
sq
dt
l
m
r
s
l
s
l
r
s
rq
(5.24)
O diagrama de blocos deste esquema e mostrado na gura 5.2. Os blocos denominados
de R
s
representam os controladores de uxo estatorico. O bloco
s
s
representa o gerador
de referencia dos uxos dq. Os termos e
s
sd
=
lmrs
lslr
s
rd
e e
s
sq
=
lmrs
lslr
s
rq
sao perturba coes a
serem compensadas (for cas contra-eletromotrizes rot oricas). Os componentes dq do uxo
no referencial estatorico (
s
sd
=
s
cos(
a
) e
s
sq
=
s
sen(
a
) possuem a mesma amplitude
s
e frequencia
a
= d
a
/dt.
Na gura 5.3 e mostrado uma varia cao deste esquema que permite uma resposta de
conjugado mais r apida. Neste caso o conjugado e controlado em malha fechada por meio
do controlador R
ce
. Este esquema e conhecido na literatura com DTC (Direct Torque
Control) [12].
Controle indireto
A estrategia de malha aberta de uxo pode ser obtida atraves da equa cao (4.4) considerando-
se condicoes de regime permanente: d
s
s
/dt = j
a
s
s
. Assim, obtem-se:
v
s
sd
= r
s
i
s
sd
(
ar
+
r
)
s
sen(
a
) (5.25)
v
s
sq
= r
s
i
s
sq
+ (
ar
+
r
)
s
cos(
a
) (5.26)
Com as correntes i
s
sd
e i
s
sq
obtidas de:
i
s
sd
= i
a
sd
cos(
a
) i
a
sq
sen(
a
) (5.27)
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 60
+
*
de fl uxo
Es t i mador
c
e
*
i
s
s
v
s
s
r
R
r
r
P
+
*
s
s
s
s
ar l
2
s
l
2
m
s
s d
s d
s
s
s q
s
R
s d
e
s q
e
+
+
+
+
s
s
*
s
v
s d
*
s
v
s q
*
s
s q
2
M A
VSI
+
r
Figura 5.2: Diagrama de controle vetorial direto por escorregamento com o uxo estat orico
no referencial estat orico
+
f
*
c
e
*
S
i
s
s
v
s
s
R
f
+
S
w
*
f
*
s
a
s
sd
s
S
S
s d
e
+
+
+
+
s
MA
VSI
+
s q
e
s
s d
v
s
*
s q
v
s
*
R
f
s
f
*
s
s
f
*
s
sq
f
s
sq
f
s
s d
w
r
R
ce
+
S
Estimador de
Fluxo e Conjugado
c
e
Figura 5.3: Diagrama de controle vetorial direto do conjugado (DTC).
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 61
i
s
sq
= i
a
sq
cos(
a
) + i
a
sd
sen(
a
) (5.28)
Onde, das equa coes (4.5)-(4.7) tem-se:
i
a
sd
=
(1 +
2
r
2
ar
)
(1 +
2
2
r
2
ar
)
s
l
s
(5.29)
i
a
sq
=
(1 )
r
ar
(1 +
2
2
r
2
ar
)
s
l
s
(5.30)
a
=
_
t
0
ar
()d +
_
t
0
r
()d (5.31)
Se as quedas de tens ao resistivas r
s
i
s
sd
e r
s
i
s
sd
forem desprezadas este esquema e sim-
plicado, obtendo-se o cl assico esquema de controle escalar Volts/Hertz. Neste caso, e
imposta ` a m aquina uma tensao estat orica, no referencial estatorico, de amplitude, obtida
das equa coes (5.25)-(5.28), e frequencia dadas por:
v
s
=
s
(5.32)
a
=
ar
+
r
(5.33)
Pode-se ainda denir outro esquema de controle cl assico escalar, denominado cont-
role escalar por escorregamento com o uxo estat orico [20]. Nesta estrategia e imposta
`a m aquina uma corrente estat orica, no referencial estatorico, de amplitude, obtida das
equa coes (5.29) e (5.30), e frequencia dadas por:
i
s
=
s
l
s
1 +
2
r
2
ar
1 +
2
2
r
2
ar
(5.34)
a
=
ar
+
r
(5.35)
5.4 Controle em quadratura
5.4.1 Controle em quadratura com o uxo rot orico
O modelo din amico que relaciona as correntes estatoricas e o uxo rot orico no referencial
uxo rot orico e obtido a partir da equa cao (5.3), fazendo-se
b
rd
=
r
,
b
rq
= 0 e
g
=
b
.
Este modelo e expresso pelas seguintes equacoes:
l
m
r
i
b
sd
=
r
r
+
d
r
dt
(5.36)
l
m
r
i
b
sq
=
br
r
(5.37)
Onde i
b
sd
= i
s
cos(
i
b
) e i
b
sq
= i
s
sen(
i
b
).
Da equa cao (4.9) e introduzindo i
b
sq
, escreve-se a seguinte express ao para o conjugado
eletromagnetico:
c
e
=
Pl
m
l
r
r
i
b
sq
(5.38)
A equa cao (5.38) mostra que o conjugado eletromagnetico pode ser controlado atraves de
i
b
sq
. Por sua vez, da equa cao (5.36), observa-se que o uxo
r
pode ser controlado atraves
de i
b
sd
, independentemente de i
b
sq
, o que caracteriza o desacoplamento perfeito no controle
do uxo face ao controle do conjugado.
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 62
+
*
sq
i
*
b
sq
i
*
s
R
b
b
b
e
j
r
de fluxo
Estimador
l
r
P l
m
c
e
*
sd
i
* b
sd
i
*
s
i
s
s
v
s
s
sq
i
sd
i
sd
u
sq
+
+
+
+
+
+
s s
s
s
i
R
s
i
R
s
*
s
v
sd
*
s
v
sq
u
MA
VSI
+
Fonte de Corrente
Figura 5.4: Controle vetorial direto em quadratura com o uxo rot orico
Controle vetorial direto
Baseado nas equa coes (5.36), (5.37) e (5.38) obtem-se o diagrama de blocos da gura 5.4
para o esquema de controle em malha fechada. Esta estrategia de controle e denominada
na literatura controle direto por orienta cao pelo campo rot orico [6]. Neste diagrama,
c
e
,
r
e i
b
sq
sao o conjugado, o uxo rot orico e a corrente em quadratura de referencias,
respectivamente. Os blocos marcados como R
b
e e
j
b
representam o controlador de uxo
e o transformador de coordenadas, respectivamente. O projeto da malha de controle de
corrente e discutida mais a frente, na secao controle de corrente.
Controle indireto
O controle de malha aberta, denominado na literatura de controle indireto por orienta cao
pelo campo rot orico [9], pode ser obtido da equacao (5.36) considerando-se d
r
/dt = 0
e usando-se a equa cao (5.37) para a determina cao do escorregamento
br
. As correntes
estatoricas de referencia sao dadas por:
i
s
sd
=
r
cos(
b
)
l
m
i
b
sq
sen(
b
) (5.39)
i
s
sq
=
r
sen(
b
)
l
m
+ i
b
sq
cos(
b
) (5.40)
br
=
l
m
r
i
b
sq
r
(5.41)
b
=
_
t
0
br
()d +
_
t
0
r
()d (5.42)
Observa-se que estas equa coes sao semelhantes ` aquelas obtidas para a estrategia de
malha aberta de controle vetorial por escorregamento com o uxo rot orico (cf. equa coes
(5.9) a (5.15)).
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 63
5.4.2 Controle em quadratura com o uxo estat orico
Da equa cao (4.9) obtem-se a expressao do conjugado eletromagnetico em termos do uxo
estatorico e da corrente estatorica:
c
e
= P
s
i
a
sq
(5.43)
Onde i
a
sq
= i
s
sen(
i
a
) e a componente do vetor corrente i
s
s
em quadratura com o vetor
s
s
.
A partir das equa coes (4.5)-(4.7) pode-se escrever uma equa cao vetorial relacionando
o uxo estat orico e a corrente estat orica:
l
s
r
i
g
s
+ l
s
di
g
s
dt
+ j(
g
r
)l
s
i
g
s
=
1
g
s
+
d
g
s
dt
+ j(
g
r
)
g
s
(5.44)
A equa cao (5.44) no referencial uxo estat orico, ou seja
a
sd
=
s
,
a
sq
= 0 e
g
=
a
, se
escreve em termos das componentes dq:
l
s
r
i
a
sd
+ l
s
di
a
sd
dt
ar
l
s
i
a
sq
=
1
s
+
d
s
dt
(5.45)
l
s
r
i
a
sq
+ l
s
di
a
sq
dt
+
ar
l
s
i
a
sd
=
ar
s
(5.46)
onde i
a
sd
= i
s
cos(
i
a
).
Denindo-se o controle do uxo estat orico por meio das correntes estatoricas, analoga-
mente ao deduzido para o controle com o uxo rot orico, tem-se que o conjugado eletro-
magnetico e controlado por meio de i
a
sq
, equa cao (5.43), e o uxo
s
e controlado atraves
de i
a
sd
, equa cao (5.45). Neste caso, entretanto, o uxo estat orico nao e criado apenas
pela componente de corrente i
a
sd
, em fase com ele. Observa-se da equacao (5.45), que
a componente i
a
sq
interfere, por meio do termo de acoplamento
ar
l
s
i
a
sq
, no controle do
uxo estat orico. Isto caracteriza um acoplamento no controle de uxo e conjugado. O
desacoplamento pode ser obtido compensando-se
ar
l
s
i
a
sq
, com
ar
calculado por meio
de (5.46). Em todo caso, para um uxo estat orico constante, o conjugado m aximo est a
limitado ao valor de pull-out (cf. a pr oxima se cao).
Controle vetorial direto
Pode-se implementar esta estrategia utilizando-se uma cascata com controladores de cor-
rente, ou seja, trocando-se o uxo rot orico pelo uxo estatorico na gura 5.4 (amplitudes
e angulo do referencial mudam de
r
,
r
e
b
para
s
,
s
e
a
, respectivamente), conforme
apresentado na gura 5.5.
Neste texto e apresentado tambem um esquema mais simples utilizando o comando
direto em tensao a partir de (4.4). A equa cao (4.4) no referencial de uxo estat orico se
escreve:
v
a
sd
= r
s
i
a
sd
+
d
s
dt
(5.47)
v
a
sq
= r
s
i
a
sq
+
a
s
(5.48)
O diagrama de blocos desta estrategia de controle e apresentado na gura 5.6. Neste
diagrama,
s
e i
a
sq
sao o uxo estat orico e a corrente em quadratura de referencias. Os
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 64
+
c
e
*
S
i
s
s
v
s
s
d
a
R
i
P
+
S
f
i
*
s
s
s d
s
S
S
s d
e
+
+
+
+
s
MA
VSI
+
s q
e
s
s d
v
s
*
s q
v
s
*
R
s
d
a
*
s
s q
s
s q
s
s d
w
r
R
Estimador
de Fluxo
+
S
* f
f
s
i
i
i
e
j
i
*
a
s d
*
a
s q
i
1
s
i
f
Figura 5.5: Controle vetorial direto em quadratura com o uxo estat orico.
sq
i
*
sq
e
j
c
e
*
R
sq
i
sd
u
sq
u
sd
* s
v
* s
v
+
+
+
+
+
+
R
a
a
i
a
a
a
a
de fluxo
Estimador
i
s
s
v
s
s
a
r
P
1
*
s
s
a
sd
*
v
a
*
v
a
sq
MA
VSI
+
Figura 5.6: Controle vetorial direto em quadratura simplicado com o uxo estat orico.
blocos assinalados com R
a
e R
a
i
, representam os controladores de uxo e de corrente
estatorica, respectivamente. Os termos u
a
sd
= r
s
i
a
sd
e u
a
sq
=
r
s
sao perturba coes a serem
compensadas.
Controle indireto
O controle em malha aberta pode ser obtido, assumindo o regime permanente das equa coes
(5.47) e (5.48) e usando (4.5)-(4.7) para determinar i
a
sd
e
ar
. As equa coes resultantes s ao
as seguintes:
v
s
sd
= v
a
sd
cos(
a
) v
a
sq
sen(
a
) (5.49)
v
s
sq
= v
a
sq
cos(
a
) + v
a
sd
sen(
a
) (5.50)
v
a
sd
= r
s
i
a
sd
(5.51)
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 65
v
a
sq
= r
s
i
a
sq
+ (
ar
+
r
)
s
(5.52)
onde
ar
, i
a
sd
e
a
sao obtidas de
ar
=
1
2
2
r
l
s
s
i
a
sq
(
1
2
2
r
l
s
s
i
a
sq
)
2
2
r
(5.53)
i
a
sd
=
s
l
s
+
ar
r
i
a
sq
(5.54)
a
=
_
t
0
ar
()d +
_
t
0
r
()d (5.55)
O termo em (5.53) e a solu cao da equa cao de segundo grau cujo valor particular (sinal
+/-) corresponde a um ponto de opera cao possvel da m aquina assncrona. O conjugado
de pull-out, para um dado uxo estatorico, corresponde ao valor m aximo de opera cao de
ar
, obtido quando o radicando e igual a zero. Este esquema e semelhante ao apresentado
nas equa coes (5.25)-(5.31).
5.5 Controle de corrente
As estrategias de controle com o uxo rot orico e a estrategia escalar por escorregamento
com uxo estat orico, tratadas neste artigo, requerem controladores de corrente. O controle
de corrente e discutido no captulo 6.
5.6 Projeto dos controladores
Os modelos din amicos para cada estrategia de controle apresentada sao do tipo linear
invariante. Estes modelos s ao de primeira ordem onde assume-se que os termos de per-
turba cao s ao constantes durante o intervalo de amostragem. Os controladores discretos
podem ser do tipo PI . Eles podem ser calculados de modo a obter-se em malha fechada
uma fun cao de transferencia de segunda ordem com coeciente de amortecimento otimo
[21] ou p olos reais identicos. Observa-se que nos casos em que as vari aveis a serem con-
troladas s ao alternadas, a utiliza cao de controladores do tipo preditivo pode ser uma
melhor alternativa que o PI (cf. Captulo 6) [22]. Os controladores s ao calculados de
forma sncrona com o comando da fonte de tens ao PWM. A gura 5.7, mostra o dia-
grama de blocos tpico de um dos controladores utilizados, neste caso, o de corrente.
O bloco delimitado por linhas pontilhadas, corresponde ` a fun cao de transferencia de
primeira ordem G(s) = K/(s + 1), onde os valores de K e sao obtidos dos modelos
adequados (cf. Captulo 6). O elemento ZOH neste diagrama corresponde a um modelo
simplicado da fonte de tensao est atica empregada na alimenta cao da m aquina. Em to-
das as estrategias consideradas a fonte de tensao (inversor PWM-VSI) e implementada
utilizando-se a tecnica de modula cao vetorial [23] (cf. Captulo 7).
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 66
R(z) ZOH G(s)
Modelo corrente/tenso
+
*
sd
u
s
sd
* s
v
sd
s
v
sd
u
s
sd
s
i t
sd
s
i
+
Figura 5.7: Sistema de controle tpico.
5.7 Estima cao do uxo magnetico da maquina
Conforme foi mencionado, nos casos das estrategias de controle do tipo direto e necessario
a realimenta cao dos uxos estat oricos ou rot oricos da maquina assncrona. Nesta se cao
se discute a estimacao dos uxos a partir da medi cao das correntes e tensoes estat oricas,
grandezas facilmente mensur aveis, e da velocidade da maquina.
Considerou-se neste artigo duas estrategias de estima cao: estima cao em malha fechada
utilizando o ltro de Kalman, [13], [24] e [16], e a estima cao em malha aberta, a partir
da equa cao de tens ao (4.4) [17]. A estima cao utilizando o ltro de Kalman e baseada
no modelo din amico discreto eletrico da maquina, com a velocidade assumida como um
par ametro mensur avel. Como se utiliza o modelo eletrico completo da m aquina, sua
implementa cao em tempo real demanda um tempo de processamento importante. No
segundo caso, o uxo estat orico e estimado, em malha aberta, baseado na equa cao (4.4)
no referencial estat orico (
g
= 0) [17]:
s
s
=
_
t
0
[v
s
s
() r
s
i
s
s
()]d (5.56)
Apesar dos problemas que podem ser causados ao integrador pelos o-sets, este
modelo e interessante porque apresenta apenas uma dependencia parametrica com r
s
.
O uxo rot orico pode ser obtido a partir do uxo estat orico e da corrente estatorica
utilizando-se as equa coes (4.6) e (4.7):
s
r
=
l
r
l
m
s
s
l
s
l
r
l
m
i
s
s
(5.57)
5.8 Complexidade de implementa cao
A carga computacional das estrategias propostas pode ser estimada atraves do n umero
de opera coes aritmeticas (multiplica cao/divisao, adi cao/subtra cao, seno/cosseno e raiz
quadrada) envolvidas no algoritmo de estima cao do uxo magnetico e no calculo dos con-
troladores. Na Tabela 5.1 e apresentado o n umero de opera coes aritmeticas correspon-
dentes a cada uma das estrategias com controle direto e o tempo total de processamento
necessario para comput a-las com o microcomputador 486-DX-66MHz. Observa-se que a
estrategia da gura 5.2 necessita do menor tempo de processamento. A estima cao dos
uxos da m aquina com o ltro de Kalman, necessita um tempo de processamento, com
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 67
microcomputador 486-DX-66MHz, de 250s. Quando se utiliza o estimador baseado nas
equa coes (5.56) e (5.57), com o mesmo microcomputador, o tempo de processamento
para estimacao e 3,3s para se estimar o uxo estat orico e 5,3s para se estimar o uxo
rot orico. O tempo necessario para a aquisi cao das vari aveis da m aquina e 50s.
Esquema Opera coes Matem aticas Total
mult/div adi/sub sen/cos raiz
Fig. 5.1 24 21 4 0 20,8s
Fig. 5.2 9 10 2 0 8,8s
Fig. 5.4 19 16 0 1 13,5s
Fig. 5.6 17 11 0 1 11,5s
Tabela 5.1: Compara cao da complexidade computacional das estrategias de controle
5.9 Resultados de simula cao
Os v arios esquemas de controle foram estudados atraves de um programa de simulacao
digital do sistema de acionamento. Em todos as estrategias o perodo de amostragem dos
controladores de uxo e de 1ms e o de corrente 200s. As tensoes de alimentacao foram
obtidas com o comando PWM vetorial [23], com frequencia de 5kHz.
A avalia cao do desempenho din amico do sistema de acionamento com as estrategias
discutidas previamente, foi realizada por meio de um ensaio din amico de caracteriza cao.
Ele foi denido por um regime transit orio do conjugado de referencia em degraus: c
e
=
0Nm t [0 0, 03s), c
e
= 7, 5Nm t [0, 03 0, 15s), e c
e
= 7, 5Nm t [0, 15 0, 3s].
A velocidade da m aquina foi inicializada com dois valores diferentes:
r
= 0 e
r
=
360rad/s. No ensaio em baixa velocidade, a maquina e excitada, a partir de uxos
iniciais nulos, segundo uma rampa de referencias 0, 02s de dura cao. Ap os este instante,
a referencia de uxo e mantida constante em
r
= 0, 8Wb ou
s
= 0, 75Wb, conforme
o uxo controlado. No ensaio em alta velocidade, considerou-se que a m aquina j a havia
sido previamente excitada com os mesmos valores de uxos de regime do ensaio anterior.
Neste texto so s ao apresentados os resultados referentes as estrategias com controle direto.
As guras 5.8 a 5.11 apresentam a evolu cao transit oria da amplitude do uxo (es-
tat orico ou rot orico), do conjugado eletromagnetico e da velocidade da maquina com as
estrategias das guras 5.1 a 5.6. A regula cao do uxo magnetico e a resposta din amica
do conjugado, excetuando-se o conjugado na gura 5.9, s ao muito boas. Semelhantes as
respostas obtidas com o controle em quadratura com orienta cao pelo uxo rot orico. A
resposta din amica do conjugado eletromagnetico na gura 5.9, referente ao esquema de
controle por escorregamento com o uxo estat orico, e mais lenta que as demais.
Os estudos das estrategias de controle indireto, mostraram que o controle vetorial in-
direto com uxo rot orico, equa coes (5.9)-(5.15) e (5.39)-(5.42), tem desempenho din amico
bom (semelhante aos resultados do controle direto apresentado na gura 5.10). Os con-
troles escalares indiretos equa coes (5.32)-(5.33), (5.34)-(5.35) e (5.16)-(5.17) e os
controles vetoriais indiretos equa coes (5.25)-(5.31), (5.49)-(5.55) apresentam compor-
tamento din amico ruim (presen ca de oscila coes no conjugado eletromagnetico e no uxo
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 68
0 0.05 0.1 0.15 0.2 0.25 0.3
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2 0.25 0.3
0
50
100
150
200
250
300
350
400
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.05 0.1 0.15 0.2 0.25 0.3
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2 0.25 0.3
-30
-20
-10
0
10
20
30
40
50
60
70
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
c
e
(
N
m
)
r
(
W
b
)
r
(
r
a
d
/ s
)
t(s)
t(s)
t(s)
c
e
(
N
m
)
r
(
W
b
)
r
(
r
a
d
/ s
)
t(s)
t(s) t(s)
(a1) (a2)
(a3) (b1)
(b2) (b3)
Figura 5.8: Controle vetorial por escorregamento com o uxo rot orico (a e b baixa e alta
velocidade, respectivamente)
durante os transit orios) ou implementa cao complexa.
5.10 Resultados experimentais
O sistema experimental utilizado e o apresentado na Figura 4.1. A m aquina assncrona
utilizada e do tipo rotor bobinado e suas caractersticas sao apresentadas em anexo. O
inversor trif asico, a transistores bipolares, opera numa frequencia de 10kHz. O sinal
de comando para o inversor, e gerado utilizando-se a tecnica PWM vetorial [23]. A
aquisi cao das vari aveis, o controle e o comando do sistema de acionamento e realizado
por um microcomputador 486-DX2-66MHz com placas dedicadas com conversores A/D e
temporizadores program aveis. Nas medi coes das corrente e tens oes estat oricas da m aquina
sao utilizados sensores a efeito Hall. A velocidade e calculada a partir da medi cao da
posi cao mec anica, obtida por meio de um captor de posi cao absoluta de 9bits. O perodo
de amostragem utilizado foi de 200s. As vari aveis experimentais apresentadas nas guras
seguinte foram medidas utilizando o sistema digital.
Como exemplo de resultados experimentais foi selecionado o esquema de controle por
escorregamento com uxo estat orico, apresentado na gura 5.2. O uxo estat orico foi
estimado utilizando o estimador baseado na equa cao (5.56).
A estrategia de controle foi avaliada para um regime transitorio, em degraus, do con-
jugado de referencia, obtido pelo comando do escorregamento
ar
. A partir do regime
permanente com
ar
= 8rad/s, em t = 2s,
ar
e feito igual a
ar
e em t = 4, 8s o sinal
de
ar
e novamente trocado, voltando ao
ar
inicial. A amplitude do uxo estat orico de
referencia e mantida constante em 0, 7Wb durante todo o ensaio.
Na gura 5.12 e apresentado o m odulo do uxo estat orico e a velocidade da m aquina.
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 69
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.05 0.1 0.15 0.2 0.25 0.3
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2 0.25 0.3
-30
-20
-10
0
10
20
30
40
50
60
70
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.05 0.1 0.15 0.2 0.25 0.3
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2 0.25 0.3
0
50
100
150
200
250
300
350
400
t(s)
c
e
(
N
m
)
(
W
b
)
s
r
(
r
a
d
/ s
)
(a1) (a2)
(a3) (b1)
t(s)
c
e
(
N
m
)
(
W
b
)
s
r
(
r
a
d
/ s
)
(b2) (b3)
t(s) t(s)
t(s)
t(s)
Figura 5.9: Controle vetorial por escorregamento com o uxo estat orico (a e b baixa e
alta velocidade, respectivamente)
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.05 0.1 0.15 0.2 0.25 0.3
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2 0.25 0.3
-30
-20
-10
0
10
20
30
40
50
60
70
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.05 0.1 0.15 0.2 0.25 0.3
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2 0.25 0.3
0
50
100
150
200
250
300
350
400
t(s)
r
(
W
b
)
r
(
r
a
d
/ s
)
(a1) (a2)
t(s)
c
e
(
N
m
)
r
(
W
b
)
r
(
r
a
d
/ s
)
(a3) (b1)
t(s)
t(s)
t(s)
t(s)
c
e
(
N
m
)
(b2) (b3)
Figura 5.10: Controle vetorial em quadratura com o uxo rot orico (a e b baixa e alta
velocidade, respectivamente)
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 70
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.05 0.1 0.15 0.2 0.25 0.3
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2 0.25 0.3
-30
-20
-10
0
10
20
30
40
50
60
70
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.05 0.1 0.15 0.2 0.25 0.3
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2 0.25 0.3
0
50
100
150
200
250
300
350
400
t(s)
c
e
(
N
m
)
(
W
b
)
s
r
(
r
a
d
/ s
)
(a1) (a2)
(a3)
c
e
(
N
m
)
(
W
b
)
s
r
(
r
a
d
/ s
)
(b1)
(b2) (b3)
t(s)
t(s)
t(s)
t(s) t(s)
Figura 5.11: Controle vetorial em quadratura com o uxo estat orico (a e b baixa e alta
velocidade, respectivamente)
Observa-se que o uxo permanece controlado no seu valor de referencia. A velocidade
evolui suavemente mesmo durante a passagem pela velocidade nula.
Na gura 5.13 e apresentado a evolu cao dos componentes dq, no referencial estat orico,
dos uxos estat oricos de referencia e real, superpostos, durante o intervalo de tempo [1, 8s
2, 4s]. Este intervalo de tempo se situa no primeiro transit orio apresentado na gura 5.12.
Esta superposi cao mostra que n ao h a diferen ca signicativa entre os uxos de referencia
e o real. De fato, o erro entre estes uxos e, no pior caso, inferior a 5%.
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 71
t(s)
t(s)
0 1 2 3 4 5 6 7 8
0
0.5
1
0 1 2 3 4 5 6 7 8
-50
0
50
s
(
W
b
)
r
(
r
a
d
/
s
)
Figura 5.12: Fluxo e velocidade experimentais obtidos com o controle por escorregamento
com o uxo estat orico.
Parametros das maquinas usadas nos testes de simula cao e experimentais
Maquina A (experimental)
1, 5kW; 380V/220V ; 60Hz; F.P. 0, 86; P = 2
r
s
= 2, 0; r
r
= 3, 0; l
s
= 0, 128H;
l
r
= 0, 128H; l
m
= 0, 117H; J/F = 1, 43s
Maquina B (simula cao)
1, 1kW; 380V/220V ; 50Hz; P = 2
r
s
= 5, 793; r
r
= 3, 421; l
s
= 0, 386H; l
r
= 0, 386H;
l
m
= 0.363H; J = 0, 0267Nm/rad/s
2
; J/F = 0, 899s
Captulo 5. Controle de uxo e conjugado da m aquina assncrona 72
1.8 1.9 2 2.1 2.2 2.3 2.4
-1
-0.5
0
0.5
1
1.8 1.9 2 2.1 2.2 2.3 2.4
-1
-0.5
0
0.5
1
s
(
W
b
)
s
d
s s
q
(
W
b
)
t(s)
t(s)
Figura 5.13: Superposi cao dos uxos experimentais obtidos com o controle por escorrega-
mento com o uxo estat orico.
Captulo 6
Controle de corrente da maquina
assncrona
6.1 Introdu cao
A utiliza cao de m aquinas assncronas em sistemas de acionamento est atico que exigem
alto desempenho din amico passa pela utiliza cao das estrategias de controle vetorial. Na
maioria destas estrategias, em particular naquelas em que o uxo rot orico e controlado,
o controle das correntes estatoricas e de import ancia fundamental.
Em geral, os controladores de corrente s ao baseados num modelo din amico invariante
de primeira ordem (siso) relacionando a corrente estat orica com a tens ao estat orica e uma
vari avel de perturba cao [25], [22], [26], [27], [18],[28]. Quando se utiliza controladores a
par ametros constantes baseados neste modelo, admite-se que a vari avel de perturba cao e
constante durante o perodo de amostragem e compens avel ` a sada do controlador.
6.2 Modelo dinamico para o controle de corrente
O modelo din amico para o controle de corrente pode ser obtido a partir do modelo (4.4)-
(4.9) e e dado por:
v
g
s
= (r
s
+
(l
s
l
s
)
r
)i
g
s
+ l
s
di
g
s
dt
+ j
g
l
s
i
g
s
+ (j
r
r
)
(l
s
l
s
)
l
m
g
r
(6.1)
Para efeitos de uma abordagem siso este modelo (6.1) pode ser reescrito como:
v
g
s
= r
sr
i
g
s
+ l
s
di
g
s
dt
+ e
g
s
(6.2)
onde r
sr
= r
s
+
(lsls)
r
e e
g
s
= j
g
l
s
i
g
s
+ (j
r
1
r
)
(lsls)
lm
g
r
.
Na abordagem de controle siso, e
g
s
e uma fcem considerada como um termo de per-
turba cao a ser compensado na sada do controlador. Doravante, este modelo ser a denom-
inado simplesmente modelo de primeira ordem.
O modelo de primeira ordem na sua forma discreta e obtido de (6.2) assumindo-se que
e
g
s
(t) pode ser considerada constante durante o perodo de amostragem h, obtendo-se:
i
g
s
(t + h) = f
i
i
g
s
(t) + h
v
[v
g
s
(t) e
g
s
(t)] (6.3)
onde f
i
= e
h/s
, h
v
= (1 e
h/s
)/r
sr
e
s
= l
s
/r
sr
.
73
Captulo 6. Controle de corrente da m aquina assncrona 74
6.3 Controle de corrente com histerese
O controle com histerese pode ser visto como um controle do tipo modos deslizantes, j a
que ele imp oe que a vari avel corrente da maquina siga uma trajet oria especicada.
O modelo (6.1) no referencial estat orico (
g
= 0), expoente s, pode ser escrito como
v
s
s
= r
sr
i
s
s
+ l
s
di
s
s
dt
+ e
s
s
(6.4)
onde e
s
s
= (j
r
1
r
)
(lsls)
lm
g
r
.
Denindo-se corrente de referencia i
s
s
e o erro de controle i
s
s
= i
s
s
i
s
s
, obtem-se de
(6.4), desprezando-se r
s
i
s
s
, a derivada do erro de corrente:
di
s
s
dt
=
1
l
s
(e
s
ts
v
s
s
) (6.5)
Onde a variavel, tipo fcem, e
s
ts
e dada por
e
s
ts
= l
s
di
s
s
dt
+ r
s
i
s
s
+ e
s
s
(6.6)
Nas secoes seguintes, baseado em (6.5), ser ao discutidas as duas vers oes de controle
com histerese mais importantes: independente e vetorial.
6.4 Controle de corrente com histerese independente
Denido-se e
s
ts
= e
s
tsd
+ je
s
tsq
, obtem-se de (6.5) as seguintes rela coes em termo dos com-
ponentes dq:
di
s
sd
dt
=
1
l
s
(e
s
tsd
v
s
sd
) (6.7)
di
s
sq
dt
=
1
l
s
(e
s
tsq
v
s
sq
) (6.8)
Da matriz P(
p
) em (4.3), com
p
= 0 e os componentes homopolares nulos, tem-se
que as vari aveis de fase s
1
sao proporcionais as vari aveis de eixo d (x
s1
=
_
2/3x
d
, onde
x representa uma vari avel qualquer). Assim, obtem-se de (6.7) a equa cao da derivada do
erro de corrente para fase s
1
:
di
s
s1
dt
=
1
l
s
(e
s
ts1
v
s
s1
) (6.9)
Segundo esta rela cao, se a tensao de fase v
s
s1
e superior a e
s
ts1
, e possvel escolher v
s
s1
de forma a impor ` a derivada do erro o sinal desejado (o que diminui o erro).
Quando se alimenta a maquina com um inversor de tensao, se a chave q
1
est a fechada
a tens ao v
s
s1
e positiva (igual a E/3, 2E/3) ou zero, dependendo do estado das chaves q
2
e q
3
; se a chave q
1
est a aberta v
s
s1
e negativa (igual a E/3 ou 2E/3) ou zero. Exceto
para v
s
s1
= 0, no pior caso, desde que E/3 seja maior que |e
s
ts1
|, pode-se impor ` a di
s
s1
/dt
o sinal desejado.
Baseando-se nesta an alise, o controle da corrente i
s
s1
por histerese e dado por:
se i
s
s1
h
q
1
= on se i
s
s1
h
q
1
= off
Captulo 6. Controle de corrente da m aquina assncrona 75
i
s1
s
i
s1
s
*
i
s1
s
+
-
q
1
Figura 6.1: Controlador com histerese independente para uma fase.
O termo
h
dene a largura da histese abaixo e acima de i
s
s1
, onde a corrente i
s
s1
real deve ser controlada. Este procedimento e aplicado para as demais fases, obtendo-
se o controlador por histerese independente trif asico [28]. O diagrama de blocos deste
controlador e apresentado na gura 6.1.
Quando a tens ao v
s
s1
e nula, v
s
s2
e v
s
s3
tambem sao nulas e a m aquina esta em roda livre,
ou seja, em curto-circuito trif asico. Neste situa cao o sinal de di
s
s1
/dt nao e imposto, ele
depende de e
s
ts1
. Pode-se mostrar que no controle por histerese trifasico, devido ao curto-
circuito trif asico, as corrente i
s
s1
, i
s
s2
e i
s
s3
podem ultrapassar o limite denido por
h
.
Entretanto, em qualquer caso os erros de corrente i
s
s1
, i
s
s2
e i
s
s3
nao ultrapassam o
valor 2
h
.
O controle por histerese independente apresenta as seguintes vantagens:
Implementa cao extremamente simples, necessita apenas da medi cao das correntes e
de alguns testes.
Depende apenas qualitativamente do modelo da m aquina. Os valores dos par ametros
da m aquina so s ao importantes para denir o valor de
h
em funcao da frequencia
m axima de opera cao do conversor.
O controle por histerese independente apresenta alguns inconvenientes ou limita coes
devido a n ao utiliza cao das rodas livres, (ou seja, da fcem de e
s
ts
) criteriosamente:
Como j a foi mencionado, o erro de corrente pode ultrapassar em duas vezes o valor
da histerese.
Para um valor de
h
constante, h a uma varia cao importante da frequencia de
opera cao do inversor. Em baixas velocidades, quando a amplitude de e
s
ts
e pequena,
a frequencia de chaveamento e grande. Podendo inclusive originar ciclos limites de
alta frequencia, onde a roda livre n ao e aplicada.
Ondice de distorcao harm onica das correntes e superior aos obtidos com os demais
metodos discutidos neste captulo.
Captulo 6. Controle de corrente da m aquina assncrona 76
i
s
s
*
i
s
s
+
-
Clculo
de
v
s
i
s
s
s
Clculo
de
e
ts
s
*
v
s
s
*
i
s
s
VSI
v
s
s
M A
Figura 6.2: Controlador por histerese vetorial.
6.5 Controle com histerese vetorial
Existem algumas alternativas para se utilizar a roda livre favoravelmente. Um exemplo
e apresentado em [29]. Neste caso, a roda livre e aplicada sistematicamente toda vez
que o erro de corrente em uma das fases ultrapassa
h
. Ela e mantida ate que o erro
em algumas das fases alcance 2
h
, quando o controle normal e assumido. Este metodo
permite baixar a frequencia do conversor sem necessitar de informa coes adicionais.
Metodos mais ecientes na utiliza cao da roda livre incorporam mais informa coes ao
controle por histerese. Nabae et alii [30] propuseram um metodo que controla direta-
mente o vetor corrente i
s
s
de uma m aquina a im a permanente. Este metodo foi depois
generalizado para utiliza cao no controle de corrente da m aquina assncrona [25].
O metodo proposto por Nabae et alii [30] consiste em escolher o vetor v
s
s
em (6.5) de
forma que a derivada do vetor erro di
s
s
/dt seja mnima em regime permanente (gura
6.2). Isto implica que a evolu cao da corrente sera mais suave e a frequencia do inversor
sera menor que no controle independente.
J a para o controle da corrente em regime transit orio, escolhe-se a m axima derivada, de
forma que o erro de corrente seja eliminado o mais r apido possvel. Em regime transit orio,
se aplica apenas os vetores v
s
s
nao nulos, contr arios ao erro i
s
s
. Isto garante que o erro
seja eliminado rapidamente.
No controle em regime permanente, o valor de v
s
s
que minimiza di
s
s
/dt, pode ser
obtido atraves de uma tabela simples, fun cao da posi cao de e
s
ts
, em setores de /3 [30].
O conhecimento da posi cao e
s
ts
e essencial neste controle.
A obten cao da posi cao de e
s
ts
e trivial quando se utiliza uma m aquina a im a per-
manente. No caso de uma maquina assncrona, pode-se utilizar a pr opria rela cao (6.5),
obtendo-se e
s
ts
em funcao de v
s
s
e di
s
s
/dt. Entretanto, quando o conjugado da m aquina e
controlado utilizando a estrategia de controle em quadratura com orientacao pelo campo,
e possvel obter facilmente e
s
ts
, conforme mostrado em [25].
Uma caracterstica natural dos controladores por histerese e que a frequencia de
opera cao do conversor e vari avel quando
h
e constante. A opera cao a frequencia con-
stante e obtida fazendo-se
h
vari avel. Bose [31] prop os um procedimento que utiliza
uma expressao de regime permanente, fun cao da velocidade da m aquina, para calcular o
Captulo 6. Controle de corrente da m aquina assncrona 77
valor de
h
, de forma a manter a frequencia de opera cao do inversor constante. Nabae et
alii [30] propuseram outro metodo em que a frequencia de opera cao do inversor e medida
e comparada com o valor de referencia desejado. O erro desta compara cao e integrado
para denir automaticamente o valor de
h
.
Genericamente, os controladores por histerese apresentam como contrapartida a forte
independencia do modelo da m aquina, a necessidade da monitora cao continua da cor-
rente. Isto interdita, em muitos casos, sua utiliza cao em um controle discreto, onde
as corrente s ao medidas apenas em intervalos de tempo discretos de amostragem. Nas
secoes seguintes ser ao discutidos outros controladores mais dependentes do conhecimento
do modelo din amico de corrente, mas que possibilitam o controle discreto da corrente
estatorica da m aquina.
6.6 Controladores de corrente linear
O modelo (6.2) pode ser utilizado para a deni cao dos controladores de corrente em um
referencial generico qualquer. Os dois referenciais de maior interesse sao os referenciais
estatorico e o sncrono. Por exemplo, segundo o vetor uxo rot orico visto do estator.
Quando se utiliza o referencial estat orico (
g
= 0) n ao existe o acoplamento de cor-
rente de um eixo em outro, termo em j
g
l
s
i
g
s
nulo. Isto e interessante porque pode-se
utilizar mais diretamente as tecnicas de controle siso. Tambem, as correntes sao con-
troladas no pr oprio referencial estat orico onde sao medidas (evitando-se a transforma cao
de referencial). Entretanto, o vetor corrente i
s
s
a ser controlada varia continuamente em
regime permanente (i
s
s
= i
s
e
j
i
onde
s
=
i
= d
i
/dt).
Quando se utiliza o referencial sncrono (
g
=
s
), o vetor corrente i
s
s
e constante em
regime permanente. Contudo, existe o acoplamento entre as correntes de eixos dq e e
necessario transformar a corrente do referencial de medi cao para o referencial de controle.
Qualquer que seja o referencial utilizado, e importante que a variavel e
g
s
, em (6.2), seja
considerada. Para se utilizar as tecnicas simples de controle siso considera-se e
g
s
como
uma perturba cao (fcem a ser compensada).
A funcao de transferencia obtida de (6.2) e dada por:
I
g
s
(s) =
1/r
sr
s
s
+ 1
V
g
es
(s) = G
s
(s)V
g
es
(s) (6.10)
onde a tensao sobre a parte LR da m aquina e dada por V
g
es
(s) = V
g
e
(s) E
g
s
(s).
Os controladores siso podem ser obtidos desta fun cao de transferencia. Um contro-
lador simples de ser implementado e o controlador PI, de funcao de transferencia contnua
G
spi
(s) = k
i
/s +k
p
. Por exemplo, ele pode ser calculado de G
s
(s) compensando-se a con-
stante de tempo
s
e considerando-se uma malha fechada com polos reais duplos em 4/h,
onde h e o perodo de amostragem das correntes [21]. O controlador discreto G
zpi
(z) e
obtido discretizando o controlador contnuo G
spi
(s), obtendo-se:
G
zpi
(z) =
k
p
z + k
1
z 1
(6.11)
onde k
1
= k
i
h k
p
.
Captulo 6. Controle de corrente da m aquina assncrona 78
i
Controlador
PI - Estator
VSI
PWM
M A
(Eq. 6.12)
v
s
s
*
v
s
s
s
s
i
s
s
*
Figura 6.3: Controlador PI no referencial estat orico.
*
Controlador
PI - Sncrono
VSI
PWM
M A
e
j
(Eq. 6.12)
i
b
i
b
s
s
v
b
s
*
v
s
s
v
s
s
*
v
b
s
i
s
s
b
j
b
e
Figura 6.4: Controlador PI no referencial sncrono do uxo rot orico.
No controle discreto assume-se que e
g
s
permanece constante durante o perodo de
amostragem h. Assim, o controlador PI discreto, com a compensa cao de e
g
s
, e dado
pela seguinte equa cao discreta:
v
g
s
(t) = v
g
s
(t h) + k
p
i
g
s
(t) + k
1
i
g
s
(t h) + e
g
s
(t) (6.12)
onde i
g
s
= i
g
s
i
g
s
.
O controlador discreto mais simples de ser implementado e o controlador PI no estator.
Onde as correntes em regime permanente sao alternadas e e
s
s
(t) = (j
r
1
r
)
(lsls)
lm
g
r
. No
caso do controlador PI no referencial sncrono vetor uxo rot orico,
g
=
b
e
g
r
=
r
, as
correntes em regime permanente sao constante e e
b
s
(t) = j
b
l
s
i
b
s
+ (j
r
1
r
)
(lsls)
lm
g
r
.
Nas gura 6.3 e 6.4 s ao apresentados os diagramas de blocos para estes dois controladores.
O controlador PI sncrono e o unico que garante de fato erro zero em regime per-
manente. J a que o integrador s o garante erro nulo em regime para sinal de referencia
contnuo. No controlador PI no estator, o erro de controle aumenta com a frequencia.
E
possvel denir um controlador PI no estator, equivalente ao controlador PI no campo.
Para isto e necessario introduzir alguns termos de compensa cao ao controlador PI no
estator [32].
Pode-se realizar o controle da corrente no referencial estat orico, mais r apido que o
controlador PI, utilizando o controle preditivo discreto de corrente, ilustrado na gura
6.5.
O controle preditivo baseado no modelo (6.3), [22], [27], e dado por :
v
s
s
(t) = [i
s
s
(t + h) f
i
i
s
s
(t)]/h
v
+ e
s
s
(t) (6.13)
Ou seja, dada a corrente de referencia i
s
s
(t + h), na pr oxima amostragem, a corrente
medida i
s
s
(t) e a fcem e
s
s
(t), no instante atual, determina-se por meio de (6.13) o valor da
tensao v
s
s
(t) a ser aplicada no instante atual.
Captulo 6. Controle de corrente da m aquina assncrona 79
i
s
s
VSI
PWM
M A
Controlador
Preditivo
( Eq. 6. 13)
v
s
s
*
v
s
s
i
s
s
*
Figura 6.5: Controlador preditivo no referencial estat orico.
Quando se opera a m aquina com a estrategia de controle por orientacao de campo
rot orico, a determina cao de e
s
s
(t) e direta [22]. Entretanto, no caso geral, ela pode ser
determinada utilizando-se o pr oprio modelo discreto (6.3). De (6.3) escreve-se:
e
s
s
(t) = v
s
s
(t) [i
s
s
(t + h) f
i
i
s
s
(t)]/h
v
(6.14)
Nesta expressao a determina cao de e
s
s
(t) depende de variaveis no instante t, mas tambem
da corrente i
s
s
(t + h), no instante t + h. Ou seja, ela e determinada com um perodo de
amostragem de atraso. Isto pode ser solucionado assumindo-se a aproxima cao e
s
s
(t) =
e
s
s
(t h). J a que e
s
s
(t h) e disponvel no instante t, obtido de (6.14), substituindo-se t
por t h.
Uma aproxima cao mais precisa para e
s
s
(t) e dada por:
e
s
s
(t) = e
j
h
e
s
s
(t h) (6.15)
onde
h
=
s
h, deslocamento angular normalmente conhecido.
A expressao (6.15) foi obtida considerando-se que em regime permanente o vetor e
s
s
,
girando a uma frequencia
s
, desloca-se em um perodo de amostragem h de um angulo
h
.
6.7 Controladores para sistemas monof asicas ou trifasicos
desbalanceados
Quando o sistema e monof asico ou trif asico desbalanceados, p.ex., maquina submetida a
uma falta, (composto de sequencia positiva e negativa) n ao e possvel usar o controlador
sncrono convencional [32] para garantir erro zero em regime permanente [33].
O modelo de estado do controlador PI para o controlador sncrono de sequencia pos-
itiva e negativa (Controlador A) e dado por
+
= e
je
s
(6.16)
dx
+
dt
= k
+
i
+
(6.17)
u
+
= x
+
+ k
+
p
+
(6.18)
= e
je
s
(6.19)
dx
dt
= k
(6.20)
u
= x
+ k
(6.21)
u
s
= e
je
u
+
+e
je
u
(6.22)
Captulo 6. Controle de corrente da m aquina assncrona 80
onde
s
= i
s
i
s
e o erro de corrente estacion ario; x
+
e x
sao vari aveis de estado associ-
adas as partes integrais de sequencia positiva e negativa; u
+
, u
and u
s
sao as tens oes
de referencia de sequencia positiva, negativa e estacion aria, respectivamente; k
+
p
, k
+
i
, k
p
,
and k
i
sao os ganhos de sequencia positiva e negativa do controlador, respectivamente.
As variaveis deste modelo s ao vetores complexos da forma y =y
d
+ jy
q
, onde y indica o
vetor.
O controlador sncrono de sequencia positiva e negativa requer o uso de transforma coes
de coordenadas e
je
e e
je
. O controlador pode ser emulado no referencial estationario.
e
j
+
e
i
s*
R
+
e
j e
R
e
j e
e
j e
u
s
u
s
+
+ u
s*
1 2 3
(a)
3 - FASES
PWM - VSI - LOAD
s
i
1
i
s
s
i
2
s
i
3
s *
u
1
s *
u
2
s *
u
3
u
+ *
u
-*
+
-
u u
1 2 3
i
i
s
s
s s
+
i
s*
R
u
s*
1 2 3
3 - FASES
PWM - VSI - LOAD
s
i
1
i
s
s
i
2
s
i
3
u u
1 2 3
i
i
s
s
s s
s
(b)
e
s *
u
1
s *
u
2
s *
u
3
Figura 6.6: Diagrama de blocos dos controladores de corrente de sequencia positiva e
negativa. (a) Controlador A (sncrono). (b) Controladores B ou C (estacionario)
Introduzindo x
s
+
= e
je
x
+
, x
s
= e
je
x
e k
p
= k
+
p
+ k
p
e usando as equa coes
(6.16)-(6.22), obtem-se o controlador estacion ario (Controlador B) dado por
dx
s
+
dt
= j
e
x
s
+
+ k
+
i
s
(6.23)
dx
s
dt
= j
e
x
s
+ k
i
s
(6.24)
u
s
= x
s
+
+x
s
+ k
p
s
(6.25)
Captulo 6. Controle de corrente da m aquina assncrona 81
O uso de mesmos ganhos k
+
i
and k
i
simplica o modelo do controlador. A partir
de (6.23)-(6.25) para k
i
= k
+
i
= k
i
e introduzindo novas variaveis x
s
a
= x
s
+
+ x
s
e
x
s
b
= j
e
(x
s
+
x
s
) obtem-se as equa coes do controlador estacionario de sequencia positiva
e negativa simplicado (Controlador C)
dx
s
a
dt
= 2k
i
s
+x
s
b
(6.26)
dx
s
b
dt
=
2
e
x
s
a
(6.27)
u
s
= x
s
a
+ k
p
s
(6.28)
Note que este controlador pode ser usado para sistemas monof asicos j a que n ao existe
o termo em j nas equa coes. Ou seja, a componente real dos vetores n ao depemde da
componente complexa e vice-versa.
A versao discreta deste controlador e dada por
x
s
a
(t) = cos (
e
h) x
s
a
(t h) +
1
e
sin (
e
h) x
s
b
(t h)
+2k
i
1
e
sin (
e
h)
s
(t h) (6.29)
x
s
b
(t) =
e
sin (
e
h) x
s
a
(t h) + cos (
e
h) x
s
b
(t h)
+2k
i
[cos (
e
h) 1]
s
(t h) (6.30)
u
s
(t) = x
s
a
(t) + k
p
s
(t) (6.31)
A Figura 6.6(a) apresenta o digrama de bloco para o Controlador A aplicado ao
controle da corrente de um sistema trifasico desbalanceado (uma m aquina de indu cao
desbalanceada). Os blocos e
je
e e
je
realizam as transforma coes de coordenadas do
referencial estacionario para os sncronos de sequencia positiva e negativa e vice-versa,
respectivamente. Os blocos u
s
/u
s
123
e i
s
123
/i
s
representam as transformacoes de vetor
para componentes trif asicos e vice-versa, respectivamente. O bloco PWM+VSI+LOAD
representa o modulador de largura de pulso, o inversor e a carga. Os blocos R
+
e R
constituem o Controlador A dado pela vers ao discreta das equa coes (6.16)-(6.22). Os
Controladores B ou C sao apresentados na Figura 6.6(b). O bloco R
s
representa os
controladores correspondentes a vers ao discreta de (6.23)-(6.25) ou ao modelo discreto
(6.29)-(6.31).
6.8 Estudo dos controladores de corrente
A caracteriza cao experimental dos controladores em regime transit orio foi feita por meio
de dois ensaios, em alta e baixa velocidade, com o sistema de acionamento padr ao (cf.
Fig. 4.1). A frequencia da referencia de corrente e mantida em 10Hz e 60Hz, denindo-
se o funcionamento da maquina em alta e baixa velocidades, respectivamente. Em baixa
velocidade a amplitude da corrente e inicializada em 1, 8A e em t = 0, 11s ela e chaveada
para 3, 5A. Em alta velocidade a amplitude da corrente e inicializada em 1, 3A e em
t = 0, 16s ela e chaveada para 2, 5A.
Sao apresentados resultados experimentais de tres dos controladores discutidos anteri-
ormente: os controladores PI no referencial sncrono de corrente e no referencial estatorico
Captulo 6. Controle de corrente da m aquina assncrona 82
e o controlador preditivo no referencial estat orico. O perodo de amostragem utilizado
nos controladores foi de 200s.
Na gura 6.7 e apresentada a superposi cao das correntes de eixo d de referencia e
medida com o controlador PI sncrono. O controlador foi calculado de forma a compensar
o p olo
s
. N ao foi feita a compensa cao do termo de perturba cao e
i
s
(t). Observa-se que
o controlador funciona muito bem. Em baixa velocidade n ao se distingue os valores de
referencia e real. Em alta velocidade o erro de regime medio e desprezvel e o erro de
regime maximo e de 4%.
Na gura 6.8 sao apresentados os resultados dos mesmos ensaios com o controlador
PI no estator. O controlador foi calculado compensando-se o p olo
s
, mas com p olos
de malha fechada duas vezes menores que o anterior, de forma a torn a-lo mais r apido.
Tambem, nao foi feita a compensa cao do termo de perturba cao e
s
s
(t). Observa-se que o
controlador funciona bem apenas em baixa velocidade (erro de regime maximo de 3%).
Em alta velocidade, mesmo com o controlador mais r apido que o controlador sncrono,
existe um visvel erro de corrente. A compensa cao de e
s
s
(t) deve permitir reduzir este erro,
mas n ao ao nvel do erro com o controlador no referencial sncrono.
0 0.01 0.02 0.03 0.04 0.05
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0 0.05 0.1 0.15 0.2 0.25
-4
-3
-2
-1
0
1
2
3
4
(b)
(a)
t(s)
i
s
d
s
(
A
)
i
s
d
s
(
A
)
t(s)
i
sd
s
* i
sd
s
Figura 6.7: Resultados experimentais das correntes de referencia e real com controlador
PI sncrono em alta e baixa velocidade
Na gura 6.9 sao apresentados os resultados dos ensaios com o controlador preditivo
no estator. O controlador foi implementado compensando-se o termo de perturba cao
e
s
s
(t) por meio da express ao (6.14). Observa-se que o controlador funciona bem em ambas
as velocidades (erro de regime m aximo de 4%). Ele segue bem a referencia em alta
velocidade, mas apresenta um pouco de oscila cao ap os o transit orio.
Captulo 6. Controle de corrente da m aquina assncrona 83
0 0.01 0.02 0.03 0.04 0.05
-3
-2
-1
0
1
2
3
0 0.05 0.1 0.15 0.2 0.25
-4
-3
-2
-1
0
1
2
3
4
(a)
i
s
d
s
(
A
)
i
s
d
s
(
A
)
t(s)
t(s)
(b)
i
sd
s
i
sd
s *
Figura 6.8: Resultados experimentais das correntes de referencia e real com controlador
PI estatorico em alta e baixa velocidade
A gura 6.10 mostra as correntes de referencia (i
s
d
e i
s
q
) e real (i
s
d
e i
s
q
) para uma
carga desbalanceada controlada pelo Controlador B ou pelo controlador sncrono. A
gura 6.10(a), obtida com Controlador B, mostra que a corrente real segue bem a re-
ferencia (erro de regime de cerca de 2%). A gura 6.10(b) mostra o teste equivalente
usando controlador sncrono. Neste caso, pode ser notado que o resultado obtido nao e
t ao bom (erro de regime de cerca de 8%).
Captulo 6. Controle de corrente da m aquina assncrona 84
0 0.05 0.1 0.15 0.2 0.25
-4
-3
-2
-1
0
1
2
3
4
0 0.01 0.02 0.03 0.04 0.05
-4
-3
-2
-1
0
1
2
3
(a)
(b)
i
s
d
s
(
A
)
i
s
d
s
(
A
)
t(s)
t(s)
i
sd
s
i
sd
s
*
Figura 6.9: Resultados experimentais das correntes de referencia e real com controlador
preditivo siso em alta e baixa velocidade
Captulo 6. Controle de corrente da m aquina assncrona 85
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
1.5
1
0.5
0
0.5
1
1.5
time (s)
C
u
r
r
e
n
t
s
(
A
)
i
d
s*
i
d
s
i
q
s*
i
q
s
(a)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
1.5
1
0.5
0
0.5
1
1.5
time (s)
C
u
r
r
e
n
t
s
(
A
)
i
d
s*
i
d
s
i
q
s*
i
q
s
(b)
Figura 6.10: Correntes experimentais para um sistema trif asico desbalanceado. (a) Con-
trolador B. (b) Controlador sncrono.
Captulo 7
Controle do inversor de tensao com
modula cao por largura de pulso
7.1 Introdu cao
O objetivo do comando do inversor por modula cao de largura de pulso e alimentar a
m aquina com tensoes trif asicas vari aveis a partir de um inversor trif asico de tens ao (gura
7.1), que fornece apenas sete nveis de tensoes diferentes. A interpretacao emprestada das
ciencias das comunicacoes explica este processo em duas fases: modula cao do sinal de
tensao fundamental de referencia segundo a alta frequencia da portadora, obtida pelo
chaveamento do inversor de tensao; demodula cao ou recupera cao do sinal fundamental
de tensao atraves da corrente da maquina, resultado da ltragem passa-baixa da tens ao
modulada. Quando se utiliza a implementacao digital do PWM, o inversor gera tens oes
instant aneas cujo valor medio, em um intervalo de tempo , e igual a tens ao de referencia
[34].
A alimentacao da m aquina por tensao PWM introduz harm onicos na corrente e no
conjugado e perdas no conversor estatico e na maquina. Estas distor coes harm onicas e as
perdas dependem do metodo de modula cao empregado [35].
O comando PWM mais cl assico, denominado de metodo seno-tri angulo ou de sub-
oscila cao, e obtido gerando-se o comando das chaves do inversor por meio da compara cao
dos sinais trif asicos de tensao de referencia (v
s
s1
, v
s
s2
e v
s
s3
) com uma portadora triangular
(v
tr
). Por exemplo, se v
s
s1
> v
tr
fecha q
1
(abre q
1
) ou se v
s
s1
< v
tr
abre q
1
(fecha
q
1
) [6]. A frequencia do conversor e igual a frequencia da onda triangular, normalmente
constante. Este metodo e usualmente implementado analogicamente, sua implementa cao
digital, devido ao processo contnuo de compara cao, demanda um circuito (hardware)
dedicado. Uma deciencia importante deste metodo e o seu baixo ndice de modula cao.
Denindo-se o ndice de modulacao como a raz ao entre a m axima tens ao fundamental
obtida com o metodo de modula cao, na regi ao linear, e a tens ao fundamental do sinal
seis-steps, obtem-se um ndice de modula cao igual a 0,785 para este metodo. O ndice
de modula cao pode ser aumentado adicionando-se a cada fase de tensao de referencia um
mesmo sinal de tens ao (tens ao homopolar). Pode-se adicionar um sinal de tens ao qual-
quer, o mais comum e um sinal de frequencia tripla da fundamental (terceiro harm onico).
Adicionando-se um sinal retangular de frequencia tripla, obtem-se o ndice de modulacao
86
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 87
s
q
1
1
2
3
0
E/2
E/2
v
s3
N
R
e
t
i
f
i
c
a
d
o
r 1 C
C
d
3f
s
v
s2
s
v
s1
q
1 1
d
q
2 2
d
q
2 2
d
q
3 3
d
3
d
q
3
Figura 7.1: Fonte de alimenta cao (inversor fonte de tens ao) e m aquina assncrona.
m aximo de 0,907 [35].
Os comandos PWM digitais mais amplamente utilizados operam com frequencia do
inversor tambem constante, o que, por analogia, pode ser associada, a frequencia da porta-
dora no metodo seno-tri angulo. O espectro de frequencia do sinal de tensao e concentrado
em torno da frequencia da portadora. Metodos de modula cao que operam com frequencia
do inversor vari avel, mas frequencia media constante, permitem obter uma distribuicao de
frequencia mais uniforme [36], [37]. Estes metodos podem diminuir a distor cao harm onica
da tens ao, reduzir o nvel de rudo audvel e as vibracoes mecanicas da m aquina.
Neste captulo s ao apresentadas as tecnicas de PWM digitais mais usuais, classicadas
em modula cao escalar e vetorial, e apresentada a rela cao entre elas.
7.2 Princpios do comando PWM
As tecnicas PWM digitais podem ser divididas em tecnicas escalares e vetoriais. Na
abordagem escalar se opera com as tens oes trif asicas por fase, enquanto na abordagem
vetorial emprega-se o vetor tens ao associado as tens oes trif asicas.
Na gura 7.1 e apresentado o sistema considerado, composto de uma fonte contnua
de alimentacao, um inversor de tens ao trif asico e a m aquina assncrona. A fonte de
tensao contnua E e obtida pela reticacao e ltragem do sistema trif asico de alimentacao
(380V, 60Hz). Nesta fonte e denido um ponto intermedi ario 0 que ser a utilizado com
um dos referenciais de tensao. O inversor de tensao trif asico e constitudo por seis chaves
q
1
, q
2
, q
3
, q
1
, q
2
e q
3
e os seus respectivos diodos. A m aquina e ligada em Y com neutro
nao interligado N . As chaves q
4
, q
5
e q
6
funcionam de forma complementar a q
1
, q
2
e q
3
, respectivamente. Atribuindo-se valores binarios as chaves, q
k
= 0 chave aberta ou
q
k
= 1 chave fechada, tem-se que q
1
= 1 q
1
e q
2
= 1 q
2
e q
3
= 1 q
3
.
As tens oes aplicadas a carga dependem da congura cao das chaves q
1
, q
2
e q
3
. As
chaves podendo assumir valores binarios 0 ou 1, existem oito combina coes possveis:
[q
1
= 1, q
2
= 1, q
3
= 1], [q
1
= 1, q
2
= 0, q
3
= 1], [q
1
= 1, q
2
= 0, q
3
= 0]
[q
1
= 1, q
2
= 1, q
3
= 0], [q
1
= 0, q
2
= 1, q
3
= 0], [q
1
= 0, q
2
= 1, q
3
= 1]
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 88
[q
1
= 0, q
2
= 0, q
3
= 1], [q
1
= 0, q
2
= 0, q
3
= 0].
As tens oes de fase nos terminais da carga trif asica s ao dadas por:
v
s
s1
= v
s
s10
+ v
0N
(7.1)
v
s
s2
= v
s
s20
+ v
0N
(7.2)
v
s
s3
= v
s
s30
+ v
0N
. (7.3)
Onde v
0N
e a diferenca de tensao do intermedi ario da fonte 0 para o neutro da m aquina
e as tensoes de polo s ao v
s
s10
, v
s
s20
e v
s
s30
sao dadas por
v
s
s10
= q
1
E
2
q
4
E
2
= (2q
1
1)
E
2
(7.4)
v
s
s20
= q
2
E
2
q
5
E
2
= (2q
2
1)
E
2
(7.5)
v
s
s30
= q
3
E
2
q
6
E
2
= (2q
3
1)
E
2
. (7.6)
Substituindose as expressoes de v
s
s10
, v
s
s20
e v
s
s30
em (7.1)-(7.3) obtem-se:
v
s
s1
= q
1
E
2
q
4
E
2
+ v
0N
= (2q
1
1)
E
2
+ v
0N
(7.7)
v
s
s2
= q
2
E
2
q
5
E
2
+ v
0N
= (2q
2
1)
E
2
+ v
0N
(7.8)
v
s
s3
= q
3
E
2
q
6
E
2
+ v
0N
= (2q
3
1)
E
2
+ v
0N
. (7.9)
7.3 Modula cao vetorial
As tens oes estat oricas v
s
sd
e v
s
sq
, no referencial estat orico, s ao obtidas em fun cao de v
s
s1
,
v
s
s2
e v
s
s3
, utilizando-se a matriz de transforma cao P(
p
)
1
com
p
= 0 (4.3):
v
s
sd
=
_
2
3
(v
s
s1
v
s
s2
2
v
s
s3
2
) (7.10)
v
s
sq
=
_
2
3
(
3
2
v
s
s2
3
2
v
s
s3
). (7.11)
Substituindo-se as expressoes de v
s
s1
, v
s
s2
e v
s
s3
, obtidas de (7.7), (7.8) e (7.9), tem-se:
v
s
sd
=
_
2
3
(q
1
q
2
2
q
3
2
)E (7.12)
v
s
sq
=
1
2
(q
2
q
3
)E. (7.13)
Observa-se que as tensoes estat orica v
s
sd
e v
s
sq
independem de v
0N
.
Para as oito combina coes de q
1
, q
2
e q
3
, obtem-se seis vetores nao nulos e dois vetores
nulos do tipo V
s
sk
= V
s
sd
+ jV
s
sq
= V
sk
sk
, onde V
sk
e o m odulo do k-esimo vetor e
sk
e o
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 89
angulo respectivo em rela cao ao eixo s1 [23]. Estes vetores, ilustrados na gura 7.2, s ao
dados por:
- q
1
= 1, q
2
= 0, q
3
= 0 (vetor V
s
s1
):
V
s
s1
=
_
2
3
E =
_
2
3
E0 (7.14)
- q
1
= 1, q
2
= 1, q
3
= 0 (vetor V
s
s2
):
V
s
s2
=
E
6
+ j
E
2
=
_
2
3
E/3 (7.15)
- q
1
= 0, q
2
= 1, q
3
= 0 (vetor V
s
s3
):
V
s
s3
=
E
6
+ j
E
2
=
_
2
3
E2/3 (7.16)
- q
1
= 0, q
2
= 1, q
3
= 1 (vetor V
s
s4
):
V
s
s4
=
_
2
3
E =
_
2
3
E (7.17)
- q
1
= 0, q
2
= 0, q
3
= 1 (vetor V
s
s5
):
V
s
s5
=
E
6
j
E
2
=
_
2
3
E4/3 (7.18)
- q
1
= 1, q
2
= 0, q
3
= 1 (vetor V
s
s6
):
V
s
s6
=
E
6
j
E
2
=
E
2
5/3 (7.19)
- q
1
= 0, q
2
= 0, q
3
= 0 (vetor V
s
s0
):
V
s
s0
= 0 (7.20)
- q
1
= 1, q
2
= 1, q
3
= 1 (vetor V
s
s7
):
V
s
s7
= 0. (7.21)
Os seis vetores n ao-nulos denem seis setores de 60
o
identicados por I, II, III, IV, V
e VI, mostrados na gura 7.2.
Um vetor tensao de referencia no plano dq pode ser obtido em termos medios num
perodo (intervalo de amostragem) utilizando-se um mnimo de dois, dentre os seis
vetores n ao-nulos possveis. Para minimizar a frequencia de opera cao do conversor utiliza-
se os dois vetores adjacente ao vetor de referencia v
s
s
.
Genericamente, dado um vetor de referencia v
s
s
, constante no intervalo de tempo ,
e os dois vetores adjacentes V
s
sk
e V
s
sl
(k = 1, ..., 6; l = k + 1 se k 5 e l = 1 se k = 6),
pode-se escrever:
1
_
0
v
s
s
dt =
1
_
t
k
0
V
s
sk
dt +
1
_
t
l
0
V
s
sl
dt (7.22)
ou
v
s
s
=
t
k
V
s
sk
+
t
l
V
s
sl
(7.23)
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 90
V
s
s2
d
q
1
2
3
I
I I
II I
I V
V
V I
(1 0 0)
(1 1 0)
(0 1 0)
(0 1 1)
(0 0 1) (1 0 1)
V
s
s1
V
s
s3
V
s
s4
V
s5
s
V
s
s6
v
s *
s
V
s0
s
V
s7
s
t
2
V
s
s 2
V
s
s1
t
1
Figura 7.2: Vetores e setores para a modula cao vetorial.
onde t
k
e t
l
sao os intervalos de tempo de aplica cao dos vetores V
s
sk
e V
s
sl
, respectivamente.
Explicitando-se a equa cao vetorial em termo dos componentes dq, tem-se:
v
s
sd
=
t
k
V
s
sdk
+
t
l
V
s
sdl
(7.24)
v
s
sq
=
t
k
V
s
sqk
+
t
l
V
s
sql
. (7.25)
Resolvendo-se (7.24) e (7.25), obtem-se:
t
k
=
(V
s
sql
v
s
sd
V
s
sdl
v
s
sq
)
V
s
sdk
V
s
sql
V
s
sdl
V
s
sqk
(7.26)
t
l
=
(V
s
sdk
v
s
sq
V
s
sqk
v
s
sd
)
V
s
sdk
V
s
sql
V
s
sdl
V
s
sqk
. (7.27)
Para que a frequencia do conversor seja constante e necessario que a soma dos tempos
dos vetores aplicados seja igual a . Assim, aplica-se os vetores nulos, que nao geram
tensao media, de forma que a condi cao de frequencia constante seja observada. Note que
os vetores nulos s ao obtidos quando a m aquina opera em curto-circuito (roda livre).
Se t
o
e o intervalo de tempo de aplica cao dos vetores nulos, tem-se:
t
o
+ t
k
+ t
l
= . (7.28)
Nesta expressao, o intervalo de tempo t
o
, pode ser distribuido no comeco, t
oi
, e no m,
t
of
, do intervalo de amostragem como mostrado na Fig. 7.3. Com este procedimento e
possvel minimizar a distorcao harm onica da corrente da m aquina distribuindo os vetores
nulos no incio (t
oi
) ou no m (t
of
) do perodo . Assim, pode-se escrever
t
o
= t
oi
+ t
of
= t
k
t
l
. (7.29)
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 91
Introduzindo o fator de distribui cao da roda livre inicial
= t
oi
/(t
oi
+ t
of
) com 0 1 (7.30)
escreve-se
t
oi
= t
o
(7.31)
t
of
= (1 )t
o
. (7.32)
O procedimento para o utiliza cao do PWM vetorial e resumido como se segue:
Dadas as componentes v
s
sd
e v
s
sq
do vetor tensao de referencia, determina-se, por
meio de testes de sinal, o setor de 60
o
em que o vetor v
s
s
se localiza, obtendo-se k
e l.
Calcula-se V
s
sdk
, V
s
sqk
, V
s
sdl
e V
s
sql
por meio de (7.14)-(7.19).
Calcula-se t
k
e t
l
com (7.26) e (7.27) e calcula-se t
o
com (7.28).
Dado o escolhido para este nvel de tensao, calcula-se t
oi
e t
of
com (7.31) e (7.32).
Em geral, e interessante inverter a sequencia de aplica cao dos dois vetores n ao-nulos
no incio de cada perodo [4].
Por exemplo, se os vetores V
s
s1
, V
s
s2
e V
s
s0
ou V
s
s7
devem ser aplicados em dois perodos
consecutivos de valor 2 (t
1
, t
2
, t
oi
e t
of
no primeiro e t
1
, t
2
, t
oi
e t
of
no segundo ),
ent ao tem-se a seguinte sequencia para os dois perodos :
[V
s
s0
{t
oi
}, V
s
s1
{t
1
}, V
s
s2
{t
2
}, V
s
s7
{t
of
}] [V
s
s7
{t
of
}, V
s
s2
{t
2
}, V
s
s1
{t
1
}, V
s0
{t
oi
}] (7.33)
onde o termo entre chaves indica o intervalo de tempo em que o vetor e aplicado.
Na gura 7.3 e apresentado o diagrama de sinais equivalente para esta sequencia.
7.4 Modula cao escalar
E possvel operar diretamente com as tens oes trif asicas nas fases da m aquina para se de-
terminar os tempos de opera cao das chaves. Ou seja, de forma a impor uma tens ao media
em cada fase, durante o perodo de amostragem , igual as referencias correspondentes.
Seja v
s
s1
, v
s
s2
e v
s
s3
as tensoes trif asicas de referencia que se deseja impor `a m aquina,
pode-se utilizar tens oes de referencia de polo v
s
s10
, v
s
s20
e v
s
s30
, para se calcular os tempos
da modula cao escalar, dadas por
v
s
s10
= v
s
s1
+ v
h
(7.34)
v
s
s20
= v
s
s2
+ v
h
(7.35)
v
s
s30
= v
s
s3
+ v
h
(7.36)
onde v
h
e uma parcela de tensao homopolar, comum ` a todas as fases.
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 92
t
1
t
2
t
'
1
t
'
2
v
s
s10
t
t
s
V
s1
s
V
s0
s
V
s7
s
V
s2
s
Vs7
s
V
s2
s
V
s0
s
V
s1
E/2
-E/2
t
t
oi
t
of
t
oi
'
t
of
'
v
s
s20
E/2
-E/2
v
s
s30
E/2
-E/2
Figura 7.3: Tens oes trif asicas para a modula cao vetorial
Como a tensao v
h
e comum ` a todas as tens oes, o vetor tens ao resultante independe
dele, ou seja, depende apenas de v
s
s1
, v
s
s2
e v
s
s3
. De toda forma, mais a frente, ser a mostrado
que a tens ao media imposta a m aquina em cada fase independe de v
h
.
A exemplo da abordagem vetorial, os tempos de opera cao das chaves s ao calculados a
partir da igualdade entre as tensoes v
s
s10
, v
s
s20
e v
s
s30
, consideradas constantes no intervalo
, e os valores medios para as tens oes instantaneas de p olo correspondentes v
s
s10
, v
s
s20
e
v
s
s30
. Denindo-se os perodos (larguras de pulso)
1
,
2
e
3
(intervalo de tempo em
que as chaves q
1
, q
2
e q
3
est ao fechadas, respectivamente) e os perodos
1
,
2
e
3
(intervalo de tempo em que as chaves q
1
, q
2
e q
3
est ao abertas, respectivamente),
escreve-se as seguintes igualdades para os valores medios:
1
_
0
v
s
s10
dt = v
s
s10
=
1
_
0
v
s
s10
dt = v
s
s10
= [
E
2
1
E
2
(
1
)]
1
(7.37)
1
_
0
v
s
s20
dt = v
s
s20
=
1
_
0
v
s
s20
dt = v
s
s20
= [
E
2
2
E
2
(
2
)]
1
(7.38)
1
_
0
v
s
s30
dt = v
s
s30
=
1
_
0
v
s
s30
dt = v
s
s30
= [
E
2
3
E
2
(
3
)]
1
(7.39)
onde as vari aveis marcadas com uma barra corresponde aos seus respectivos valores
medios.
Das rela coes (7.37)-(7.39), obtem-se as relacoes para os tempos
1
,
2
e
3
:
1
= (
v
s
s10
E
+
1
2
) (7.40)
2
= (
v
s
s20
E
+
1
2
) (7.41)
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 93
3
= (
v
s
s30
E
+
1
2
). (7.42)
A tensao media obtida neste procedimento se refere ao ponto 0. Entretanto, pode-se
mostrar que, em termos medios, as tensoes de polo s ao iguais aos valores de referencia
v
s
s1
, v
s
s2
e v
s
s3
. Calculando-se os valores medio de (7.1)-(7.3) tem-se:
v
s
s1
= v
s
s10
+ v
0N
(7.43)
v
s
s2
= v
s
s20
+ v
0N
(7.44)
v
s
s3
= v
s
s30
+ v
0N
. (7.45)
Substituindo v
s
s10
= v
s
s10
= v
s
s1
+v
h
, v
s
s20
= v
s
s2
= v
s
s20
+v
h
e v
s
s30
= v
s
s30
= v
s
s3
+v
h
, tem-se:
v
s
s1
= v
s
s1
+ v
h
+ v
0N
(7.46)
v
s
s2
= v
s
s2
+ v
h
+ v
0N
(7.47)
v
s
s3
= v
s
s3
+ v
h
+ v
0N
. (7.48)
Adicionando-se membro a membro as rela coes (7.46)-(7.48), tem-se:
v
s
s1
+ v
s
s2
+ v
s
s3
= v
s
s1
+ v
s
s2
+ v
s
s3
+ 3v
h
+ 3v
0N
. (7.49)
A maquina e assumida ligada em Y n ao interligado, ent ao a soma das correntes
de fase e nula (corrente homopolar nula). Como a m aquina e simetrica, o somat orio das
tensoes de fase e nulo (tens ao homopolar nula), isto e v
s
s1
+v
s
s2
+v
s
s3
= 0. Tambem, como
as referencias obedecem a v
s
s1
+v
s
s2
+v
s
s3
= 0, ent ao obtem-se de (7.49) que 3v
0N
+3v
h
=
0 v
0N
= v
h
. Consequentemente, conclui-se de (7.46)-(7.48) a igualdade procurada:
v
s
s1
= v
s
s1
; v
s
s2
= v
s
s2
; v
s
s3
= v
s
s3
. (7.50)
As relacoes (7.40)-(7.42) podem ser expressas tambem em funcao das tens oes v
s
sd
e v
s
sq
.
Da matriz de transforma cao P(0) (4.3), tem-se que
v
s
s1
=
_
2
3
v
s
sd
(7.51)
v
s
s2
=
1
6
(v
s
sd
3v
s
sq
) (7.52)
v
s
s3
=
1
6
(v
s
sd
+
3v
s
sq
). (7.53)
Substituindo (7.51)-(7.53) em (7.34)-(7.36) e depois em (7.40)-(7.42), escreve-se:
1
= (
_
2
3
v
s
sd
E
+
1
2
) +
v
h
E
(7.54)
2
= (
1
6
v
s
sd
3v
s
sq
E
+
1
2
) +
v
h
E
(7.55)
3
= (
1
6
v
s
sd
+
3v
s
sq
E
+
1
2
) +
v
h
E
. (7.56)
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 94
1
1
'
'
'
v
s
s10
E/2
-E/2
v
s
s20
E/2
-E/2
v
s
s30
E/2
-E/2
t
3
t
toi t
oi
t of
'
'
t
of
Figura 7.4: Tens oes trif asicas para a modula cao escalar.
Um procedimento mais simples para a obten cao dos tempos e calcular
1
e
2
por
meio de (7.54) e (7.55), respectivamente, e
3
empregando-se
3
= 3
v
h
E
+
3
2
1
2
(7.57)
obtido usando-se a soma de (7.54)-(7.56).
E possvel expressar a tens ao v
h
em funcao do fator , denido na se cao anterior. Esta
expressao e dada por:
v
h
= E(
1
2
) (1 )v
s
sM
v
s
sm
(7.58)
onde v
s
sM
e v
s
sm
sao os valores m aximos e mnimos das tens oes de fase de referencia (v
s
s1
,
v
s
s2
e v
s
s3
), respectivamente.
A exemplo da modula cao vetorial, tambem na versao escalar, a sequencia de aplica coes
das tensoes que melhora a simetria e obtida por processo de invers ao. Isto e realizado
intercalando-se a chave q
1
e q
4
, q
2
e q
5
e q
3
e q
6
na inicializa cao de cada perodo . Assim,
utilizando nota cao semelhante ` aquela utilizada para a modula cao vetorial, tem-se:
- para a fase 1 [q
4
{
1
}, q
1
{
1
}] [q
1
{
1
}, q
4
{
1
}]
- para a fase 2 [q
5
{
2
}, q
2
{
2
}] [q
2
{
2
}, q
5
{
2
}]
- para a fase 3 [q
6
{
3
}, q
3
{
3
}] [q
3
{
3
}, q
6
{
3
}]
Na gura 7.4 e apresentado o diagrama de sinais correspondente.
7.5 Rela cao entre as modulac oes vetorial e escalar
Nas guras 7.3 e 7.4, observa-se que os vetores aplicados s ao V
s
s1
e V
s
s2
(k = 1, l = 2). O
vetor V
s
s1
e aplicado no intervalo de tempo
1
2
e V
s
s2
e aplicado no intervalo de tempo
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 95
3
, ou seja
t
1
=
1
2
(7.59)
t
2
=
2
3
(7.60)
Calculando-se t
1
e t
2
com as expressoes (7.26) e (7.27) para k = 1 e l = 2, tem-se:
t
1
=
1
E
(
3v
s
sd
v
s
sq
) (7.61)
t
2
=
2
E
v
s
sq
. (7.62)
Calculando-se t
1
e t
2
com as expressoes (7.59) e (7.60), com os valores de
1
e
2
calcula-
dos com (7.54)-(7.56), obtem-se o mesmo resultado dado em (7.61) e (7.62), demonstrando
que os dois metodos sao equivalentes em termo das tensoes medias geradas.
Analisando-se um ciclo de frequencia fundamental completo, as express oes (7.59) e
(7.60) podem ser generalizadas de forma a expressar os tempos t
k
e t
l
em funcao de
1
,
2
e
3
, obtendo-se
t
k
=
M
i
(setor impar); t
k
=
i
m
(setor par) (7.63)
t
l
=
i
m
(setor impar); t
l
=
M
i
(setor par) (7.64)
onde
M
,
m
e
i
sao os valores m aximo, mnimo e intermedi ario das larguras de pulso
1
,
2
e
3
, respectivamente. Note que
M
e
m
sao relacionadas diretamente a v
s
sM
e v
s
sm
,
denido na se cao anterior, respectivamente.
Na gura 7.4 existe duas rodas livres no incio e no m do intervalo de dura cao
t
oi
=
1
e t
of
=
3
. Funcao portanto do tempo m aximo
M
=
1
e do tempo mnimo
m
=
3
. Genericamente, pode-se escrever as seguintes expressoes para os tempos de roda
livre
t
oi
=
M
(7.65)
t
of
=
m
. (7.66)
Como t
o
= t
oi
+ t
of
, obtem-se
t
o
=
M
+
m
. (7.67)
Na tabela 7.1 sao apresentados testes que permitem determinar os setores da mod-
ula cao vetorial em fun cao das larguras de pulso
1
,
2
e
3
.
E possvel modicar as larguras de pulso (
1
,
2
e
3
) correspondentes a um para
novas larguras de pulso (
1
,
2
e
3
) corresponderntes a um outro
. Pode-se mostrar
utilizando-se, por exemplo, (7.58) e (7.67) as novas larguras de pulso
1
,
2
e
3
que sao
dadas por
i
=
i
+ (
)t
o
para i = 1, 2, 3.
Captulo 7. Controle do inversor de tens ao com modula cao por largura de pulso 96
Modula cao
Vetorial Escalar
Setor I - (V
s
1
V
s
2
)
1
>
2
>
3
Setor II - (V
s
2
V
s
3
)
2
>
1
>
3
Setor III - (V
s
3
V
s
4
)
2
>
3
>
1
Setor IV - (V
s
4
V
s
5
)
3
>
2
>
1
Setor V - (V
s
5
V
s
6
)
3
>
1
>
2
Setor VI - (V
s
6
V
s
1
)
1
>
3
>
2
Tabela 7.1: Testes para relacionar as modula coes escalar e vetorial
Captulo 8
Topicos especiais
8.1 Introdu cao
Sistemas est aticos de acionamento de m aquinas alto desempenho sao uma demanda cres-
cente em aplica coes industrias e domesticas. A realizacao de tais sistemas de acionamento
demanda o desenvolvimento de tecnicas especcas de estima cao, controle, detec cao e com-
pensa cao de falhas.
Em seguida sao apresentados sucintamente alguns temas importantes na realiza cao de
acionamento de alto desempenho.
8.2 Estima cao
A estima cao de par ametros e uma das tarefas mais importantes nos sistemas de aciona-
mento est aticos de alto desempenho, pois nos seus resultados e baseado o c alculo dos
controladores de corrente, uxo, conjugado, velocidade ou posi cao. Particularmente, a es-
tima cao de par ametros e muito importante na sintonia dos controladores com orienta cao
pelo campo da m aquina de indu cao (controle em quadratura). Tambem, a estima cao da
velocidade possibilita a realiza cao de acionamentos sem sensor mec anico de velocidade.
Normalmente, os par ametros da m aquina sao obtidos utilizando procedimentos cl assicos
de medicao eletromec anicos, que s ao de difcil automatiza cao e pouco precisos. Estudos
tem tratado da determina cao de par ametros da m aquina assncrona, com a modelagem
dq, utilizando tecnicas de estimacao parametrica.
A estima cao pode ser realizada baseada no modelo de regime permanente expresso
na forma de uma regressao n ao-linear [38]. Esta abordagem permite estimar todos os
par ametros do motor, mas a sua convergencia depende da condicao inicial.
A estima cao baseada no modelo din amico pode ser empregada de forma simples usando
condicoes particulares de opera cao da m aquina. Um exemplo, e a estima cao com rotor
bloqueado usando um sinal de excita cao especial que n ao gera conjugado eletromagnetico
[39].
A estima cao pode ser realizada usando modelo de regress ao linear considerando as
condicoes de opera cao [40] e usando sinal de alimenta cao senoidal PWM, sem nenhum
sinal especial de excita cao [41]. Neste caso nem todos os par ametros da m aquina sao
estimados, apenas os par ametros do modelo de controle s ao estimados.
97
Captulo 8. T opicos especiais 98
A estima cao para aplica coes em tempo real pode ser realizada utilizando v arios mod-
elos em cascata associados com sinais de excita cao de alta frequencia, que nao afeta de
forma importante conjugado da m aquina [42].
Alem da estimacao de par ametros baseada nos modelos dq, e possvel tambem utilizar
o modelo homopolar (o) da m aquina para a obten cao de par ametros importantes para a
caracteriza cao da m aquina. Em [43] o modelo homopolar da m aquina e utilizado para
a determina cao da indut ancia de dispersao e a resistencia estat orica da m aquina. Com
estes parametros e aqueles que podem ser obtidos com o modelo dq, todos os par ametros
da m aquina podem ser determinados. A explora cao do modelo homopolar da m aquina
para estimacao e mais simples de ser feita quando utiliza-se maquina de quatro fases [44].
Neste caso n ao e necessario o acesso ao neutro da m aquina.
8.3 Controle
Os sistemas de acionamento est atico com m aquina de corrente alternada de alto desem-
penho sao realizados controlando-se de forma desacoplada o uxo e o conjugado.
No caso do controle indireto por orienta cao pelo campo rot orico, e possvel denir
um procedimentos para sintonizar on-line a constante de tempo rot orica, par ametro que
varia durante a opera cao da m aquina e que e critco para a sintonia deste esquema de
controle. Um exemplo desta abordagem e a utiliza cao da tecnica de controle adaptativo
por modelo de referencia (MRAC) [45]. Ela objetiva estimar o ganho de escorregamento
ou a velocidade do uxo rot orico no controle indireto por orienta cao pelo campo.
Pode-se utilizar tecnicas de controle vetorial tambem em acionamentos com motores
de inducao monof asico, operando como motor bif asico desbalanceado. Em [46] e [47]
sao apresentadas estrategias de controle vetorial para a motores de indu cao monof asico
(bif asico desbalanceado) que permite operar estes motores com alto desempenho din amico.
Conforme introduzido no captulo de controle de corrente, o controle de corrente em
m aquinas bifasicas desbalanceadas, como no caso anterior, m aquinas trif asicas operando
de forma desbalanceada devido a uma falta, ou, simplesmente, sistemas trifasicos desbal-
anceados, demandam controladores de corrente especiais. Em [33] [48] sao discutidos em
detalhes os controladores sncronos de sequencia positiva e negativa para o controle de
sitemas trif asicos a tres os [33] e a quatro os (com componente homopolar) [48].
O controle de corrente da m aquina de indu cao pode ser tambem realizado utilizando
tecnicas de randomiza cao para reduzir alguns tipos de r uidos. Em [49] sao apresentadas
estrategias de controle de corrente, associadas a met odos PWM rand omico, para o controle
das correntes da maquina de indu cao.
8.4 Detec cao e compensa cao de falhas
A conabilidade do equipamento de acionamento est atico e muito importante nas aplica coes
industriais. O medo de faltas tem sido preventivo na exploracao do potencial da eletr onica
de potencia na produ cao industrial.
Varios aspectos devem ser desenvolvido para a realiza cao eciente da deteccao e com-
pensa cao de falhas:
Captulo 8. T opicos especiais 99
- detecao da falha.
- denicao de modelos para caracteriza cao e o controle da m aquina assncrona desbal-
anceada devido a falhas.
- controle de sistemas desbalanceados, ja que e usual que o sistema pos-falha seja
desbalanceado.
- controle de conversores est aticos com n umero reduzido de componentes, resultantes
do isolamento do componente defeituoso.
A detecao da falha e essencial para que a recongura cao e a compensacao da falha
sejam realizadas. Em [50] e apresentado um metodo de detecao da falha das chaves do
inversor de tens ao. Este metodo e baseado na medi cao das tens oes de polo, ou de fase,
ou de linha ou msemo de neutro.
Em [51] e [52] s ao apresentados sistemas recongur aveis que permitem operar o motor
de forma balanceada apos a perda de um dos bra cos do conversor.
Outro sistema recongur avel, neste caso para a opera cao reversvel em potencia, e
apresentado em [53]. Este sistema se recongura, passando de um conversor CA/CA de
seis a para cinco bra cos.
8.5 Sistemas de acionamento com n umero reduzido
de componentes
Em aplica coes de baixa potencia e possvel utilizar estruturas de acionamento de baixo
custo com a m aquina de indu cao trif asica ou bif asica.
Em [54] s ao apresentados sistemas de acionamento com m aquina trif asica e bif asica
com n umero reduzido de componente, mas mantendo alto desempenho din amico. O
conversor utilizado e composto de um reticador de um bra co (meia onda) e um inversor
de dois bra cos.
Em [55] e apresentado um sistema de acionamento de m aquina bif asica de tres bracos
(sem coneccao do ponto medio do capacitor). O controle PWM vetorial apresentado
permite minimizar o THD das tens oes da m aquina.
Um sistema de acionamento reversvel para o acionamento de m aquinas trif asicas e
bif asicas utilizando conversor de quatro bra cos e apresentado em [56]. Estes sistemas
apresentam caractersticas intermediarias entre os sistemas equivalentes com tres (meia
onda) e cinco bra cos (onda completa).
Bibliograa
[1] C. B. Jacobina, M aquinas Eletricas. Campina Grande - PB: Curso de Pos-Gradua cao
em Eng. Eletrica da UFCG, 1984.
[2] L. Ljung, System identication: theory for the user. Englewood Clis, New Jersey:
Prentice-Hall, Inc., rst ed., 1987.
[3] R. H. Middleton and G. C. Goodwin, Digital control and estimation, vol. 1. Engle-
wood Clis, New Jersey: Prentice-Hall, Inc., rst ed., 1990.
[4] C. B. Jacobina, E. R. C. da Silva, A. M. N. Lima, and R. L. A. Ribeiro, Vector and
scalar control of a four switch three phase inverter, in Conf. Rec. IEEE-IAS Annu.
Meeting, 1995.
[5] A. Nabae, I. Takahashi, and H. Akagi, A new neutral-point-clamped pwm inverter,
IEEE Trans. Ind. Applicat., vol. 17, pp. 518523, Sep./Oct. 1986.
[6] W. Leonhard, Control of Electric Drives. Berlin: Springer Verlag, rst ed., 1985.
[7] P. L. Falb and W. A. Wolovich, Decoupling in the design and synthesis of mul-
tivariable control systems, IEEE Trans. Automatic Control, vol. 12, pp. 651659,
December 1967.
[8] B. K. Bose, Scalar decoupled control of induction motor, IEEE Trans. Ind. Elec-
tron., vol. 20, pp. 216225, Jan./Feb. 1984.
[9] R. Doncker and D. W. Novotny, The universal eld oriented controller, in Conf.
Rec. IEEE-IAS Annu. Meeting, pp. 450456, 1988.
[10] I. Takahashi and T. Noguchi, A new quick response and high eciency control
strategy of an induction motor, IEEE Trans. Ind. Applicat., vol. 22, no. 5, pp. 820
827, 1986.
[11] R. D. F. Rossi, B. R. Menezes, and S. R. Silva, Vector control of voltage fed three-
phase inverters: Variable switching regions, in Proc. IEEE PESC, pp. 219224,
1994.
[12] T. G. Habetler and D. M. Divan, Control strategies for direct torque control us-
ing discrete pulse modulation, IEEE Trans. Ind. Applicat., vol. 27, pp. 893901,
Sep./Oct. 1991.
100
BIBLIOGRAFIA 101
[13] A. M. N. Lima, Commande Numerique dune Machine Asynchrone. These de docteur,
Institut National Polytechnique de Toulouse, Toulouse - France, 1989.
[14] H. Buhler, Electronique de reglage et de commande. Lausanne: Presses Polytechnique
Romandes - Dunod, rst ed., 1979.
[15] T. A. Lipo and K. C. Chang, A new approach to ux and torque-sensing in induction
machines, IEEE Trans. Ind. Applicat., vol. 22, no. 4, pp. 731737, 1986.
[16] M. Pietrzak-David, B. de Fornel, A. M. Lima, and K. Jelassi, Digital control of
an induction motor drive by stochastic estimator and airgap magnetic ux feedback
loop, IEEE Trans. Power Electron., vol. 7, no. 2, pp. 393403, 1992.
[17] X. Xu, R. de Doncker, and D. W. Novotny, A stator ux oriented induction machine
drive, in Proc. IEEE PESC, pp. 870876, IEEE, 1988.
[18] E. B. de Souza Fl., Estimacao e controle em acionamentos com m aquinas assncronas
em campo orientado. Tese de doutorado, Universidade Federal da Paraba, Departa-
mento de Engenharia Eletrica, Campina Grande - Pb, junho 1993.
[19] J. A. Santisteban and R. M. Stephan, Proposal of a general analitical method for
the vector controls of induction motors, in Proceedings II Congresso Brasileiro de
Eletronica de Potencia, (Uberl andia - Mg), pp. 396401, SOBRAEP, Dezembro 1993.
[20] G. O. Garcia, R. M. Stephan, and E. H. Watanabe, Controle de velocidade de um
motor de inducao atraves de tecnicas de campo orientado indireto e escorregamento
controlado, in Proceedings VIII Congresso Brasileiro de Automatica, (Belem - Pa),
pp. 955960, SBA, 1990.
[21] H. Buhler, Reglages echantilonnees, vol. 1. Lausanne: Presses Polytechnique Roman-
des - Dunod, rst ed., 1983.
[22] C. B. Jacobina, E. B. S. Fl., and E. R. C. da Silva, Controladores de corrente com
motor de inducao em campo orientado, in Proceedings VIII Congresso Brasileiro de
Autom atica, (Belem - Pa), pp. 991996, SBA, Setembro 1990.
[23] H. W. V. Broeck, H. Skudelny, and G. V. Stanke, Analysis and realization of a
pulsewidth modulator based on voltage space vectors, IEEE Trans. Ind. Applicat.,
vol. 24, pp. 142150, Jan./Feb. 1988.
[24] K. F. Silva, Estimacao do Fluxo Magnetico em M aquinas Assncronas Utilizando
o Filtro de Kalman. Disserta cao de mestrado, Universidade Federal da Paraba,
Campina Grande - Pb, 1991.
[25] C. B. Jacobina, E. B. de Souza Fl., and E. R. C. da Silva, Induction motor drive
using hysteresis current controllers, in Proceedings International Conference on Elec-
trical Machines, (Boston - USA), pp. 12551260, July 1990.
BIBLIOGRAFIA 102
[26] E. B. de Souza Fl., C. Jacobina, and E. R. C. da Silva, Acionamento est atico de mo-
tor de inducao com controlador de corrente com histerese independente e a inuencia
do retardo de tempo, in Proceedings III Semin ario de Eletr onica de Potencia, (Flo-
rian opolis - Sc), pp. 102105, Dezembro 1990.
[27] A. C. Oliveira, C. B. Jacobina, and A. M. N. Lima, Predictive current control strate-
gies for electrical machines, in Proceedings II Congresso Brasileiro de Eletronica de
Potencia, pp. 118123, SOBRAEP, Dezembro 1993.
[28] D. M. Brod and D. W. Novotny, Current control of vsi-pwm inverters, IEEE Trans.
Ind. Applicat., vol. 21, pp. 526570, May/June 1985.
[29] C. Andrieux, Realization dun ensemble a vitesse variable de dynamique elevee. These
de docteur, Institut National Polytechnique de Toulouse, Toulouse - France, Septem-
ber 1986.
[30] A. Nabae, S. Ogasawara, and H. Akagi, A novel control scheme for current-controlled
pwm inverters, IEEE Trans. Ind. Applicat., vol. 22, pp. 697701, July/Aug. 1986.
[31] B. K. Bose, An adaptive hysterese-band current control technique of a voltage-
fed pwm inverter for machine drive system, IEEE Trans. Ind. Electron., vol. 37,
pp. 402408, October 1990.
[32] T. M. Rowan and R. J. Kerkman, A new synchronous current regulator and an
analysis of a current-regulated pwm inverter, IEEE Trans. Ind. Applicat., vol. 22,
pp. 678690, July/Aug. 1986.
[33] C. B. Jacobina, M. B. de R. Correa, T. M. Oliveira, A. M. N. Lima, and E. R. C.
da Silva, Current control of unbalanced electrical systems, IEEE Trans. Ind. Elec-
tron., vol. 48, pp. 517525, June 2001.
[34] S. R. Bowes, Novel real-time harmonic minimized pwm control for drives and static
power converter, IEEE Trans. Power Electron., vol. 9, pp. 256262, May 1994.
[35] J. W. Kolar, H. Ertl, and F. C. Zach, Inuence of the modulaton method on the
conduction and switching losses of a pwm converter system, IEEE Trans. Ind. Ap-
plicat., vol. 27, pp. 10631075, November/December 1991.
[36] R. L. Kirlin, S. Kwok, and S. Legowski, Power spectra of a pwm inverter with
randomized pulse position, IEEE Trans. Power Electron., vol. 9, pp. 463472, Sep.
1994.
[37] T. G. Habetler and D. M. Divan, Acoustic noise reduction in sinusoidal pwm drives
using randomly modulated carrier, IEEE Trans. Power Electron., vol. 6, pp. 356
363, July 1991.
[38] A. M. N. Lima, C. B. Jacobina, and E. B. de Souza Fl., Non-linear parameter
estimation of steady state induction machine models, IEEE Trans. Ind. Electron.,
vol. 44, pp. 390397, June 1997.
BIBLIOGRAFIA 103
[39] C. B. Jacobina, J. E. C. Fl., and A. M. N. Lima, Estimating the parameters of
induction machines at standstill, IEEE Trans. Energy Conversion, vol. 17, pp. 85
89, Jan. 2002.
[40] L. A. de S. Ribeiro, C. B. Jacobina, and A. M. N. Lima, Linear parameter estimation
for induction machines considering the operating conditions, IEEE Trans. Power
Electron., vol. 14, pp. 6273, Jan. 1999.
[41] L. A. de S. Ribeiro, C. B. Jacobina, and A. M. N. Lima, Parameter estimation of
induction machines under sinusoidal pwm excitation, IEEE Trans. Energy Conver-
sion, vol. 14, pp. 12181223, July 1999.
[42] L. A. de S. Ribeiro, C. B. Jacobina, A. M. N. Lima, and A. C. Oliveira, Real-time
estimation of the electric parameters of induction machine using sinusoidal pwm
voltage waveforms, IEEE Trans. Ind. Applicat., vol. 36, pp. 743754, Sep./Oct.
2000.
[43] C. B. Jacobina, J. E. C. Fl., and A. M. N. Lima, Estimation of the stator resistance
of induction machines based on zero-sequence model, IEEE Trans. Power Electron.,
vol. 15, pp. 346353, March 2000.
[44] C. B. Jacobina, C. C. de Azevedo, and A. M. N. Lima, On-line estimation of the
stator resistance and leakage inductance of a four-phase induction machine drive,
IEEE Trans. Power Electron., vol. 19, pp. 1015, Jan. 2004.
[45] L. A. de S. Ribeiro, C. B. Jacobina, A. M. N. Lima, and A. C. Oliveira, Parameter
sensitivity of the mrac models employed in ifo controlled ac motor drive, IEEE
Trans. Ind. Electron., vol. 44, pp. 536545, Aug. 1997.
[46] M. B. de R. Correa, C. B. Jacobina, A. M. N. Lima, and E. R. C. da Silva, Rotor
ux-oriented control of a single-phase induction motor drive, IEEE Trans. Ind.
Electron., vol. 47, pp. 832841, Aug. 2000.
[47] M. B. de R. Correa, C. B. Jacobina, E. R. C. da Silva, and A. M. N. Lima, Vector
control strategies for single-phase induction motor drive systems, IEEE Trans. Ind.
Electron., vol. 51, Oct. 2004.
[48] C. B. Jacobina, M. B. de R. Correa, R. F. Pinheiro, E. R. C. da Silva, and A. M. N.
Lima, Modeling and control of unbalanced three-phase systems containing convert-
ers, IEEE Trans. Ind. Applicat., vol. 39, pp. 18071816, Nov./Dec. 2001.
[49] C. B. Jacobina, A. M. N. Lima, E. R. C. da Silva, and A. M. Trzynadlowski, Current
control for induction motor drives using random pwm, IEEE Trans. Ind. Electron.,
vol. 45, pp. 704712, Oct. 1998.
[50] R. L. A. Ribeiro, C. B. Jacobina, E. R. C. da Silva, and A. M. N. Lima, Fault
detection of open-switch damage in voltage-fed pwm motor drive systems, IEEE
Trans. Power Electron., vol. 16, pp. 587593, March 2003.
BIBLIOGRAFIA 104
[51] M. B. R. Correa, C. B. Jacobina, E. R. C. da Silva, and A. M. N. Lima, An induction
motor drive system with improved fault tolerance, IEEE Trans. Ind. Applic., vol. 37,
pp. 873879, May/June 2001.
[52] R. L. A. Ribeiro, C. B. Jacobina, E. R. C. da Silva, and A. M. N. Lima, Fault toler-
ant voltage-fed pwm inverter ac motor drive systems, IEEE Trans. Ind. Electron.,
vol. 51, pp. 439446, April 2004.
[53] C. B. Jacobina, R. L. A. Ribeiro, E. R. C. da Silva, and A. M. N. Lima, Fault tolerant
reversible ac motor drive system, IEEE Trans. Ind. Applicat., vol. 39, pp. 10771084,
Nov./Dec. 2003.
[54] C. B. Jacobina, M. B. R. Correa, E. R. C. da Silva, and A. M. N. Lima, Induction
motor drive system for low-power applications, IEEE Trans. Ind. Applicat., vol. 35,
pp. 5261, Jan./Feb. 1999.
[55] C. B. Jacobina, M. B. de R. Correa, A. M. N. Lima, and C. R. da Silva, Ac motor
drive systems with a reduced switch count converter, IEEE Trans. Ind. Applicat.,
vol. 39, pp. 13331342, Sep./Oct. 2003.
[56] M. B. de R. Correa, C. B. Jacobina, A. M. N. Lima, and E. R. C. da Silva, A three-
leg voltage source inverter for two-phase ac motor drive systems, IEEE Trans. Power
Electron., vol. 17, pp. 517523, Juli 2002.
Você também pode gostar
- BMA0155635B BMA0155635B-636: Numero de LiberaçãoDocumento1 páginaBMA0155635B BMA0155635B-636: Numero de LiberaçãoAnonymous 2IvdvpFAinda não há avaliações
- BMA0155635B BMA0155635B-636: Numero de LiberaçãoDocumento1 páginaBMA0155635B BMA0155635B-636: Numero de LiberaçãoAnonymous 2IvdvpFAinda não há avaliações
- BMA0155635A BMA0155635A-636: Numero de LiberaçãoDocumento1 páginaBMA0155635A BMA0155635A-636: Numero de LiberaçãoAnonymous 2IvdvpFAinda não há avaliações
- Manual 7 SK 88Documento14 páginasManual 7 SK 88Anonymous 2IvdvpFAinda não há avaliações
- Sistema de Bombeamento de ÁguaDocumento3 páginasSistema de Bombeamento de ÁguaAnonymous 2IvdvpFAinda não há avaliações
- BMA0159538 Ordem Coleta ADRIANODocumento1 páginaBMA0159538 Ordem Coleta ADRIANOAnonymous 2IvdvpFAinda não há avaliações
- Recibo de Locação de Bens Móveis: R$ 2.310,00 Dois Mil E Trezentos E Dez ReaisDocumento1 páginaRecibo de Locação de Bens Móveis: R$ 2.310,00 Dois Mil E Trezentos E Dez ReaisAnonymous 2IvdvpFAinda não há avaliações
- 15 - Controle de Nivel em CaldeirasDocumento18 páginas15 - Controle de Nivel em CaldeirasWelliton Nazaré FreitasAinda não há avaliações
- BMA0153736C BMA0153736C-737: Numero de LiberaçãoDocumento1 páginaBMA0153736C BMA0153736C-737: Numero de LiberaçãoAnonymous 2IvdvpFAinda não há avaliações
- Mi0102p - Memorial Tecnico Quadro Eletrico (Rev.0 - Mai.2013) PDFDocumento14 páginasMi0102p - Memorial Tecnico Quadro Eletrico (Rev.0 - Mai.2013) PDFAnonymous 2IvdvpF100% (1)
- Instalacoes EletricasDocumento15 páginasInstalacoes EletricasAnonymous 2IvdvpFAinda não há avaliações
- Comandos Elétricos e DispositivosDocumento70 páginasComandos Elétricos e DispositivosSimao RaivaAinda não há avaliações
- Alternadores de veículos automotores: dimensões, tipos básicos e esquemas de ligação de reguladores eletromecânicosDocumento6 páginasAlternadores de veículos automotores: dimensões, tipos básicos e esquemas de ligação de reguladores eletromecânicosAnonymous 2IvdvpFAinda não há avaliações
- Economia de EnergiaDocumento11 páginasEconomia de Energia1marcosAinda não há avaliações
- Ntd-6.05-Ceb - Norma Técnica de Distribuição.Documento177 páginasNtd-6.05-Ceb - Norma Técnica de Distribuição.enespAinda não há avaliações
- Digital ProbabilidadeDocumento67 páginasDigital ProbabilidadeAnonymous 2IvdvpFAinda não há avaliações
- Manual de Operação e Instalação Calha ParshallDocumento13 páginasManual de Operação e Instalação Calha Parshallmarinfabiano100% (3)
- WEG cfw08 Inversor de Frequencia 10413066 Catalogo Portugues BR PDFDocumento16 páginasWEG cfw08 Inversor de Frequencia 10413066 Catalogo Portugues BR PDFAnonymous 2IvdvpF100% (1)
- Capítulo 01Documento116 páginasCapítulo 01André MattosAinda não há avaliações
- Dispositivos - 6 FET Parte I v1 - 2Documento63 páginasDispositivos - 6 FET Parte I v1 - 2Humberto FelixxAinda não há avaliações
- Apostila - Comandos de Voo IDocumento28 páginasApostila - Comandos de Voo IEduardo Barbosa BessaAinda não há avaliações
- Circ Ele I A09Documento9 páginasCirc Ele I A09nicolasAinda não há avaliações
- Cálculo carga guia linearDocumento10 páginasCálculo carga guia linearBarbosaSantoAinda não há avaliações
- HTTP - Eletronicasilveira - Forumeiros.com - t4618 Como Modificar Uma Fomte Atx Com Ci 2005z PDFDocumento11 páginasHTTP - Eletronicasilveira - Forumeiros.com - t4618 Como Modificar Uma Fomte Atx Com Ci 2005z PDFluis.sinatoAinda não há avaliações
- Manual Retificadora PÍCCOLADocumento6 páginasManual Retificadora PÍCCOLAPaulo João AlvesAinda não há avaliações
- O Nome Divino por Extenso revela os Mistérios do UniversoDocumento35 páginasO Nome Divino por Extenso revela os Mistérios do UniversoYosef Mori100% (2)
- EletrogravimetriaDocumento4 páginasEletrogravimetriapedroaugusto1313Ainda não há avaliações
- UNIVERSIDADE POLITÉCNICA Plano Analitico Fisica 1Documento8 páginasUNIVERSIDADE POLITÉCNICA Plano Analitico Fisica 1EddyAinda não há avaliações
- Enrolamento ArmaduraDocumento12 páginasEnrolamento ArmaduraMarlon Rezende100% (2)
- Máquinas Elétricas I - Lista de ExercíciosDocumento6 páginasMáquinas Elétricas I - Lista de ExercíciosIsrael FélixAinda não há avaliações
- ELETROSTÁTICA - FORÇA ELÉTRICA e ELETRIZAÇÃODocumento7 páginasELETROSTÁTICA - FORÇA ELÉTRICA e ELETRIZAÇÃOKauan OliveiraAinda não há avaliações
- 10 - Lista CinemáticaDocumento20 páginas10 - Lista CinemáticaPaulinha TorresAinda não há avaliações
- Caracteristicas de Transformadores de Corrente de Acordo Com As Normas Parte 01Documento18 páginasCaracteristicas de Transformadores de Corrente de Acordo Com As Normas Parte 01Thamires Colodino100% (1)
- Receptores elétricos: características e aplicaçõesDocumento2 páginasReceptores elétricos: características e aplicaçõesDrielly DanillyAinda não há avaliações
- Instalação e precauções do amplificador DBS 720Documento8 páginasInstalação e precauções do amplificador DBS 720Adriano Camocardi100% (1)
- UF-1183-ANQ AP 01 - Variadores Velocidade - Instalacao e EnsaioDocumento74 páginasUF-1183-ANQ AP 01 - Variadores Velocidade - Instalacao e EnsaioFábio Leite100% (5)
- Padronização de serviços de calibração acreditadosDocumento42 páginasPadronização de serviços de calibração acreditadosCarlos RogérioAinda não há avaliações
- Ressonância Harmônica - Você Cria A Sua Própria RealidadeDocumento118 páginasRessonância Harmônica - Você Cria A Sua Própria RealidadeMiguelBrandãoAinda não há avaliações
- FÍSICADocumento104 páginasFÍSICARebeca ZanchettaAinda não há avaliações
- Cap 4 ProvaDocumento5 páginasCap 4 ProvaEsdras FerrazAinda não há avaliações
- Caderno de AtividadesDocumento99 páginasCaderno de AtividadesRaquel Pereira100% (1)
- Exercícios para Revisão - LaboratórioDocumento5 páginasExercícios para Revisão - LaboratórioAna Laura Siqueira Miranda100% (3)
- Energia cinética e potencial em exercícios físicosDocumento4 páginasEnergia cinética e potencial em exercícios físicosRogério CostaAinda não há avaliações
- Lista de Exercicios 18Documento4 páginasLista de Exercicios 18Bethania NogueiraAinda não há avaliações
- Física PPT - As Leis de NewtonDocumento11 páginasFísica PPT - As Leis de NewtonFísica PPT100% (2)
- Movimento de pontos em coordenadasDocumento37 páginasMovimento de pontos em coordenadasAlexandre GuilundoAinda não há avaliações
- Questões Aula Física 1-6Documento8 páginasQuestões Aula Física 1-6João LuísAinda não há avaliações
- Trabalho Bombas de PalhetasDocumento4 páginasTrabalho Bombas de PalhetasFabianoPsFabiano100% (1)
- Confirmação de Encomenda: SEW-EURODRIVE Brasil LtdaDocumento80 páginasConfirmação de Encomenda: SEW-EURODRIVE Brasil LtdaMateus das Neves OlímpioAinda não há avaliações