Você também pode gostar
- Selectividad Castilla y Leon InglesDocumento2 páginasSelectividad Castilla y Leon Inglesmacortijo16Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Introduction To Computer and Multimedia NotesDocumento28 páginasIntroduction To Computer and Multimedia NotesserachguruAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Introduction To PIC Micro - Origin of PIC Micro - PIC Micro Family - RISC Concepts - HardwareDocumento3 páginasIntroduction To PIC Micro - Origin of PIC Micro - PIC Micro Family - RISC Concepts - Hardwareveeramaniks408Ainda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Home Lighting LED Canopy Lights of Commercial Lighting For Sale atDocumento8 páginasHome Lighting LED Canopy Lights of Commercial Lighting For Sale atDanilo Delgado BonillaAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
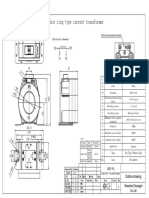
- Outdoor Ring Type Current Transformer: Electrical SchematicDocumento1 páginaOutdoor Ring Type Current Transformer: Electrical SchematicWalter EguizabalAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- NIDCD Noise Induced Hearing LossDocumento4 páginasNIDCD Noise Induced Hearing LossquuyiixAinda não há avaliações
- Instrument Transformer (Compatibility Mode)Documento1 páginaInstrument Transformer (Compatibility Mode)Mona Klody WahbaAinda não há avaliações
- Lect 17 Amp Freq RespDocumento22 páginasLect 17 Amp Freq RespBent777Ainda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Premier Slide ManualDocumento28 páginasPremier Slide Manualinfo2378Ainda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Fuji E11 CatalogueDocumento24 páginasFuji E11 CatalogueShujhat AhmedAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- 3D Catalog HG11 31 enDocumento47 páginas3D Catalog HG11 31 enqwkerbk090909Ainda não há avaliações
- Ieee 841 MotorsDocumento8 páginasIeee 841 MotorsLaurence MalanumAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- 21 Ele 13Documento3 páginas21 Ele 13c rajAinda não há avaliações
- AFT05MP075NDocumento21 páginasAFT05MP075NTeyfik koyuncuAinda não há avaliações
- UTAS-0082 Automatic Marshall CompactorDocumento8 páginasUTAS-0082 Automatic Marshall CompactorAna FloreaAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- ..Documento2 páginas..eim lenideAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Kangaroo 924 Operation ManualDocumento25 páginasKangaroo 924 Operation ManualAlejandro RocabadoAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Manual Modifiable Week Clock ENDocumento6 páginasManual Modifiable Week Clock ENkratmelAinda não há avaliações
- L2, L3 Protocol Testing Training in ChennaiDocumento2 páginasL2, L3 Protocol Testing Training in ChennaiSachin Patil0% (1)
- Color Monitor: Service ManualDocumento44 páginasColor Monitor: Service ManualPaulo Roberto s freireAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Gen 2 ManualDocumento37 páginasGen 2 Manualwilfer0421Ainda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- CC442 Chapter 8 Asynchronous CounterDocumento19 páginasCC442 Chapter 8 Asynchronous CounterMuhamdA.BadawyAinda não há avaliações
- Bill of Quantities - Feb29Documento15 páginasBill of Quantities - Feb29Elmer Soroan BarrerasAinda não há avaliações
- Spots V14 Ig MDocumento420 páginasSpots V14 Ig MApollos_80Ainda não há avaliações
- 6SL3244-0BB12-1BA1 Datasheet enDocumento1 página6SL3244-0BB12-1BA1 Datasheet enchmatias3Ainda não há avaliações
- Microprocessor Based Traffic Light ControlDocumento10 páginasMicroprocessor Based Traffic Light ControlFraud PriyanAinda não há avaliações
- Comf3242 Pss GlobalDocumento37 páginasComf3242 Pss Globalkhang nguyen hoangAinda não há avaliações
- 2022 Auto Wiring DLC TestDocumento4 páginas2022 Auto Wiring DLC TestmilevyoAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- UVCDocumento9 páginasUVCMarco E. MadrigalAinda não há avaliações
- Technicall Specification of 630 KVA, 11-0.415 KV Dry Type Outdoor Transformers.......... Dated. 31.08.2015Documento25 páginasTechnicall Specification of 630 KVA, 11-0.415 KV Dry Type Outdoor Transformers.......... Dated. 31.08.2015spidervinoAinda não há avaliações