Você também pode gostar
- Unit 2 - Analysis of HVDC Converters and HVDC System ControlDocumento20 páginasUnit 2 - Analysis of HVDC Converters and HVDC System Controlkarthik78% (9)
- Ee6711 PSS Lab Viva QuestionsDocumento10 páginasEe6711 PSS Lab Viva QuestionsshreeAinda não há avaliações
- Single Phase Dual ConverterDocumento15 páginasSingle Phase Dual ConverterBhavin Bhanushali100% (11)
- Module 3 - 2&16marksDocumento25 páginasModule 3 - 2&16markskesavantAinda não há avaliações
- 12.smoothing Reactor & Reactive Power Control of HVDC SystemDocumento32 páginas12.smoothing Reactor & Reactive Power Control of HVDC SystemPavan Kumar50% (4)
- Line-Commutated and Active PWMDocumento2 páginasLine-Commutated and Active PWMAnonymous HyOfbJ650% (2)
- Power Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuDocumento50 páginasPower Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuhodeeesvcetAinda não há avaliações
- Question Bank For Electric DrivesDocumento10 páginasQuestion Bank For Electric DrivesPradosh100% (1)
- Unit-5 Harmonics & FiltersDocumento25 páginasUnit-5 Harmonics & FiltersBhanu100% (1)
- Experiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierDocumento4 páginasExperiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierMohammed Dyhia Ali100% (2)
- Harmonics and Filter in HVDCDocumento39 páginasHarmonics and Filter in HVDCZahira JavedAinda não há avaliações
- Converter Faults & ProtectionDocumento24 páginasConverter Faults & Protectionsunilkumarece88% (41)
- Ch7 - CoRONA - Power System 2 - GTUDocumento20 páginasCh7 - CoRONA - Power System 2 - GTUAbhishek Maurya100% (1)
- Lab 10-Impedance RelayDocumento12 páginasLab 10-Impedance RelayAliza SharifAinda não há avaliações
- 2 Mark Answer and 16 Mark Question - HVDCDocumento22 páginas2 Mark Answer and 16 Mark Question - HVDCMr.N.Vijayasarathi EEE Depart50% (2)
- Cycloconverter: 3.1 Principle of Operation of CycloconverterDocumento19 páginasCycloconverter: 3.1 Principle of Operation of CycloconverterS JainAinda não há avaliações
- HVDC NotesDocumento56 páginasHVDC Notesmahi100% (2)
- Iare - HVDC - Lecture Notes PDFDocumento57 páginasIare - HVDC - Lecture Notes PDFShakeeb ArefinAinda não há avaliações
- 7.noload and Blocked Rotor Test On Singlephase Induction MotorDocumento5 páginas7.noload and Blocked Rotor Test On Singlephase Induction Motormandadi_sailesh100% (2)
- On AC Voltage ControllersDocumento25 páginasOn AC Voltage ControllersSahil ChoudharyAinda não há avaliações
- Power System Reactance Diagram Questions PDFDocumento22 páginasPower System Reactance Diagram Questions PDFHota bAinda não há avaliações
- Sem QuestionsDocumento11 páginasSem QuestionsRojaAinda não há avaliações
- AbcdDocumento5 páginasAbcdkumarchaturvedulaAinda não há avaliações
- Chapter Thirteen: DC Drives Using Controlled RectifiersDocumento38 páginasChapter Thirteen: DC Drives Using Controlled Rectifiersyemane gebremichal100% (2)
- Negative Sequence & Zero Sequence Reactance PDFDocumento6 páginasNegative Sequence & Zero Sequence Reactance PDFviksoniAinda não há avaliações
- Brake Test On DC Shunt MotorDocumento5 páginasBrake Test On DC Shunt MotorkudupudinageshAinda não há avaliações
- MP Electrical Drives Lab ManualDocumento37 páginasMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- Swinburne'S Test: AIM: To Pre-Determine The Efficiency of A D.C Shunt Machine by PerformingDocumento6 páginasSwinburne'S Test: AIM: To Pre-Determine The Efficiency of A D.C Shunt Machine by PerformingAshutosh SharmaAinda não há avaliações
- Power System Nagrath-Kothari-Solutions PDFDocumento88 páginasPower System Nagrath-Kothari-Solutions PDFAmi Kar100% (2)
- Viva Questions On AlternatorsDocumento6 páginasViva Questions On AlternatorsKashif Hussain RazwiAinda não há avaliações
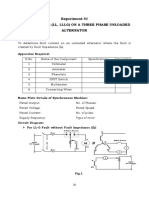
- 6.fault Analysis (LL, LLLG) On A Three Phase Unloaded AlternatorDocumento4 páginas6.fault Analysis (LL, LLLG) On A Three Phase Unloaded Alternatorarjuna4306Ainda não há avaliações
- Beyond SyllabusDocumento2 páginasBeyond SyllabusharimadhavareddyAinda não há avaliações
- Power Electronics - 2 MARKSDocumento30 páginasPower Electronics - 2 MARKSkarthik kumar50% (4)
- 9.speed Control of DC Motor Using Chopper DriveDocumento8 páginas9.speed Control of DC Motor Using Chopper DriveDhivya N100% (2)
- Ee8703-Res Question Bank..Documento11 páginasEe8703-Res Question Bank..kanakaraj0% (1)
- Etap MCQ: and The Applied Derating Percentage Is %, ThisDocumento4 páginasEtap MCQ: and The Applied Derating Percentage Is %, ThisAhmed FathiAinda não há avaliações
- Electrical Machines 3rd Edition - S. K. Bhattacharya PDFDocumento113 páginasElectrical Machines 3rd Edition - S. K. Bhattacharya PDFajai_cseAinda não há avaliações
- Power Flow Analysis of AC/DC Systems: Single Phase AlgorithmDocumento49 páginasPower Flow Analysis of AC/DC Systems: Single Phase AlgorithmSajith RpAinda não há avaliações
- Calibration of LPF WattmeterDocumento2 páginasCalibration of LPF WattmeterSingam Sridhar100% (3)
- Subject Code/name: EE 2306-Flexible AC Transmission Systems: Facts 8 Kce/Eee/Qb/Ivyr/FactsDocumento26 páginasSubject Code/name: EE 2306-Flexible AC Transmission Systems: Facts 8 Kce/Eee/Qb/Ivyr/FactssivakumarsarvananAinda não há avaliações
- Turn ON and Off Characteristics of SCRDocumento17 páginasTurn ON and Off Characteristics of SCRVedant .Chavan100% (2)
- Power System Dynamics and Control Question Bank-Part 1 (For First Internal Examination)Documento4 páginasPower System Dynamics and Control Question Bank-Part 1 (For First Internal Examination)Sanjoy PathakAinda não há avaliações
- Electric Drives by GK Dubey PDFDocumento54 páginasElectric Drives by GK Dubey PDFTana Azeez100% (1)
- MODEL - QU - Modeling and Analysis of Electrical Machines - Set1Documento2 páginasMODEL - QU - Modeling and Analysis of Electrical Machines - Set1Bala Subramanian80% (5)
- Sreekavithaengineerig College: Scott Connection of TransformersDocumento4 páginasSreekavithaengineerig College: Scott Connection of Transformersmandadi_saileshAinda não há avaliações
- Utilization of Electrical Energy Question Bank PDFDocumento17 páginasUtilization of Electrical Energy Question Bank PDFKranthi Kumar100% (1)
- EE6504 Electrical Machines-II (2 Mark Q & A) PDFDocumento16 páginasEE6504 Electrical Machines-II (2 Mark Q & A) PDFUnknownAinda não há avaliações
- Unit-3-Power Flow Analysis in AC DC SystemsDocumento21 páginasUnit-3-Power Flow Analysis in AC DC Systemsravikumar_rangan100% (1)
- Gate Firing Circuits For SCR'S R-C Triggering CircuitDocumento3 páginasGate Firing Circuits For SCR'S R-C Triggering CircuitB ANIL KUMARAinda não há avaliações
- Electrical Machines Lab QuestionsDocumento2 páginasElectrical Machines Lab Questionskarthikeyan75% (4)
- PotentiometerDocumento5 páginasPotentiometerSARDAR PATEL100% (1)
- Single Phase Rectifier Fed DC Motor DriveDocumento11 páginasSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- High Voltage DC TransmissionDocumento50 páginasHigh Voltage DC TransmissionAnith Krishnan95% (19)
- of PWM DC MotorDocumento21 páginasof PWM DC Motorabhay_131250% (4)
- Sequence Impedance of ALTERNATORDocumento10 páginasSequence Impedance of ALTERNATORkumarchaturvedula75% (4)
- Electrical Drive - LAB-ManualDocumento31 páginasElectrical Drive - LAB-Manualanil patelAinda não há avaliações
- Exp 2Documento6 páginasExp 2College ISMAinda não há avaliações
- Chapter 5Documento73 páginasChapter 5Niket GuptaAinda não há avaliações
- Presentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Documento30 páginasPresentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Parameswararao BillaAinda não há avaliações
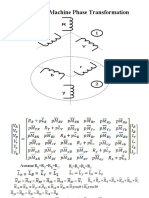
- Induction Machine Phase TransformationDocumento20 páginasInduction Machine Phase Transformation7sn omerAinda não há avaliações
- Mathematics 9 First Quarter ExamDocumento4 páginasMathematics 9 First Quarter ExamMayang Robete100% (1)
- Diophantine Equations HandoutDocumento2 páginasDiophantine Equations Handoutdb7894Ainda não há avaliações
- Fluid Flow in Oil ReservoirsDocumento29 páginasFluid Flow in Oil ReservoirsRoy EtAinda não há avaliações
- Algebra 2Documento7 páginasAlgebra 2api-262893996Ainda não há avaliações
- Mathematics: Development of Measurement and Measures of Length Let's Practice ADocumento8 páginasMathematics: Development of Measurement and Measures of Length Let's Practice AMark John Paul OlivaAinda não há avaliações
- PRECALCULUS TOS-MidtermDocumento2 páginasPRECALCULUS TOS-MidtermJERLYN MACADOAinda não há avaliações
- Bar Code: Open Rubric Open RubricDocumento203 páginasBar Code: Open Rubric Open RubricQuinnCham Mia GiftAinda não há avaliações
- Mechanical Vibration PDFDocumento130 páginasMechanical Vibration PDFViswa NathanAinda não há avaliações
- Math Pp1 s.6 St. Mary - S Kitende 2020Documento3 páginasMath Pp1 s.6 St. Mary - S Kitende 2020mungufeni amosAinda não há avaliações
- DLL Grade 9 Math Q2 Week 1Documento4 páginasDLL Grade 9 Math Q2 Week 1Cris Jan100% (5)
- SMK Dato Bentara Dalam 2018 QaDocumento7 páginasSMK Dato Bentara Dalam 2018 QaJin XinAinda não há avaliações
- MATS MiningSyllabus PDFDocumento83 páginasMATS MiningSyllabus PDFaufal RiswanAinda não há avaliações
- Numerical Methods IIDocumento22 páginasNumerical Methods IIMuktaAinda não há avaliações
- Quantitative Fish Dynamics PDFDocumento561 páginasQuantitative Fish Dynamics PDFAlfredo Perez100% (1)
- p3 Revision PaperDocumento18 páginasp3 Revision PaperrachitAinda não há avaliações
- Diff EQ Cheat SheetDocumento2 páginasDiff EQ Cheat SheetkykjhjhkjhkjAinda não há avaliações
- Section 6 Matrix Equations and Systems of Linear EquationsDocumento22 páginasSection 6 Matrix Equations and Systems of Linear Equations3bbad.aaaAinda não há avaliações
- 1999 11 03 Models StreamsamplingDocumento67 páginas1999 11 03 Models StreamsamplingmalikrituAinda não há avaliações
- Digtal Signal Processing AECB23: Institute of Aeronautical Engineering CollegeDocumento15 páginasDigtal Signal Processing AECB23: Institute of Aeronautical Engineering CollegeBairam Ravi KumarAinda não há avaliações
- Week02 - Bracketing MethodsDocumento24 páginasWeek02 - Bracketing MethodsInunHazwaniKhairuddin100% (2)
- A. R. Paterson A First Course in Fluid DynamicsDocumento535 páginasA. R. Paterson A First Course in Fluid DynamicsLuis Silva Navarro86% (7)
- Sample - Paper - STHP 2019 Nov 04 2019 PDFDocumento6 páginasSample - Paper - STHP 2019 Nov 04 2019 PDFMuzzamil HussainAinda não há avaliações
- ANSYS CFX IntroductionDocumento68 páginasANSYS CFX IntroductionBhaskar NandiAinda não há avaliações
- Algebra Baldor EbayDocumento4 páginasAlgebra Baldor EbayEduardo LopezAinda não há avaliações
- 1 First Order EquationsDocumento520 páginas1 First Order EquationsAakash MadhuAinda não há avaliações
- B. Arch. SYLLABUS REG 2017Documento91 páginasB. Arch. SYLLABUS REG 2017Infi Coaching CenterAinda não há avaliações
- Chapter 2.4 Functions As Real World Models PDFDocumento29 páginasChapter 2.4 Functions As Real World Models PDFjiiAinda não há avaliações
- Topic 4 Reasoning and Problem SolvingDocumento34 páginasTopic 4 Reasoning and Problem SolvingKimberly V. TumulakAinda não há avaliações
- MULTIPLE CHOICE. Choose The One Alternative That Best Completes The Statement or Answers The Question. Solve The EquationDocumento4 páginasMULTIPLE CHOICE. Choose The One Alternative That Best Completes The Statement or Answers The Question. Solve The EquationNono SikwiAinda não há avaliações
- Ordinary Differential EquationsDocumento16 páginasOrdinary Differential EquationsShehroze Khan Nyaze Noori khelAinda não há avaliações