Você também pode gostar
- Telemando Por Onda PortadoraDocumento3 páginasTelemando Por Onda PortadoraFabricio CamilettiAinda não há avaliações
- Ampliacion de RangoDocumento4 páginasAmpliacion de RangoMiguel CastroAinda não há avaliações
- Empalmes y TerminalesDocumento30 páginasEmpalmes y TerminalesFlavio Cesar Gonsales RondonAinda não há avaliações
- 01 - Automatismos y ControlDocumento94 páginas01 - Automatismos y ControlTomas VargasAinda não há avaliações
- Laboratorio 1 Distribución Primera PlantaDocumento5 páginasLaboratorio 1 Distribución Primera PlantaJean paul Acha carreñoAinda não há avaliações
- Detectores de Señal FotoelectricosDocumento30 páginasDetectores de Señal FotoelectricosDiana CastroAinda não há avaliações
- Trabajo Final de Instrumentacion Industrial 4 1Documento9 páginasTrabajo Final de Instrumentacion Industrial 4 1Jeremy ReyesAinda não há avaliações
- Tema 6 OsciloscopioDocumento42 páginasTema 6 OsciloscopioYscarlys MartinezAinda não há avaliações
- Sistemas de Automatizacion de Edificion Capitulo 2Documento35 páginasSistemas de Automatizacion de Edificion Capitulo 2Juan Roberto100% (1)
- Verificaciones Y/o Inspecciones Reglamentarias en Detectores de Aislamiento de Bloques QuirurgicosDocumento5 páginasVerificaciones Y/o Inspecciones Reglamentarias en Detectores de Aislamiento de Bloques QuirurgicosJuan Manuel BaezaAinda não há avaliações
- Mandos-De Lorenzo PDFDocumento86 páginasMandos-De Lorenzo PDFAgustin Basilio Salinas100% (1)
- P6 - Medidas Eléctricas de Línea de TelefoníaDocumento6 páginasP6 - Medidas Eléctricas de Línea de Telefoníajavier100% (1)
- Aparamenta EléctricaDocumento13 páginasAparamenta EléctricaAntonio MartinezAinda não há avaliações
- Ejercicios LogoDocumento27 páginasEjercicios Logoluis gomezAinda não há avaliações
- Informe Previo 4Documento3 páginasInforme Previo 4luisosesti80Ainda não há avaliações
- Lógica Combinacional de Contactos y RelésDocumento12 páginasLógica Combinacional de Contactos y RelésMiguel Andres Cardenas VegaAinda não há avaliações
- Enclavamiento Del ContactorDocumento7 páginasEnclavamiento Del ContactorRICARDO SUASNAVAS100% (1)
- Leyes Básicas en El Análisis de Circuitos VirtualDocumento19 páginasLeyes Básicas en El Análisis de Circuitos Virtualsevernaya82Ainda não há avaliações
- Control de Temperatura Con PICDocumento13 páginasControl de Temperatura Con PICErick Robles0% (1)
- Manual Terraneo Analogo Digital 8h PDFDocumento77 páginasManual Terraneo Analogo Digital 8h PDFManuel LozanoAinda não há avaliações
- Laboratorios Analoga 2020 PDFDocumento53 páginasLaboratorios Analoga 2020 PDFLeydi Leon ValenciaAinda não há avaliações
- Trabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoDocumento46 páginasTrabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoWalter Jesus100% (1)
- Interruptor DiferencialDocumento62 páginasInterruptor DiferencialBen HurAinda não há avaliações
- Cerradura Electrónica Codificad1Documento6 páginasCerradura Electrónica Codificad1Marlon Glowing SalasAinda não há avaliações
- Unidad Didáctica Sistemas Automatizados: Lógica Programada: ObjetivosDocumento9 páginasUnidad Didáctica Sistemas Automatizados: Lógica Programada: ObjetivosMª ANGELES MARTINEZ SALMERONAinda não há avaliações
- Electrotecnia Simbologia de Automatismos Electricos (PLC Madrid) PDFDocumento34 páginasElectrotecnia Simbologia de Automatismos Electricos (PLC Madrid) PDFAnxo X. Ferreirós100% (1)
- Eler11 PDFDocumento8 páginasEler11 PDFAbraham Sanchez DelCampoAinda não há avaliações
- Medición de CapacitanciaDocumento28 páginasMedición de CapacitanciaJorge Martinez AvitiaAinda não há avaliações
- INFORME DE LABORATORIO Previo 2Documento19 páginasINFORME DE LABORATORIO Previo 2Carlos AndrésAinda não há avaliações
- Guía 01 - Empalmes Conectores y TerminalesDocumento8 páginasGuía 01 - Empalmes Conectores y TerminalesMarceloCanoAinda não há avaliações
- Presentaciones de Sensores y ActuadoresDocumento54 páginasPresentaciones de Sensores y ActuadoresfelipeAinda não há avaliações
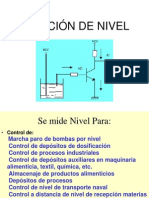
- Medición de NivelDocumento37 páginasMedición de NivelEDdy Santiago Valle ArceAinda não há avaliações
- Tema 2 Sistemas Electronicos PDFDocumento9 páginasTema 2 Sistemas Electronicos PDFPEDROAinda não há avaliações
- Electrotecnia S14Documento6 páginasElectrotecnia S14Pedro Martin Quiroz TapiaAinda não há avaliações
- Ei 130Documento40 páginasEi 130quique1967.ecAinda não há avaliações
- Elec. PotenciaDocumento16 páginasElec. Potenciaalejandra caveroAinda não há avaliações
- Generador de SeñalesDocumento28 páginasGenerador de SeñalesGus MartinezAinda não há avaliações
- Guia Automatismo BasicoDocumento119 páginasGuia Automatismo BasicoalanAinda não há avaliações
- Las Instalaciones EléctricasDocumento6 páginasLas Instalaciones Eléctricasgil armando lara banteAinda não há avaliações
- Automatismos Electricos Trabajo en ClaseDocumento14 páginasAutomatismos Electricos Trabajo en ClaseRomelReyesAinda não há avaliações
- UF0886 1 OdtDocumento11 páginasUF0886 1 OdtManuelMarti42Ainda não há avaliações
- Laboratorios Analoga I 2017Documento52 páginasLaboratorios Analoga I 2017Robert Portocarrero Gamboa100% (1)
- Labo1 ContactorDocumento12 páginasLabo1 ContactorMarco Antonio Fernández SalazarAinda não há avaliações
- 2012 - Circuito para Captura de Señales ECGDocumento4 páginas2012 - Circuito para Captura de Señales ECGRicardo VelazquezAinda não há avaliações
- Guía de La Aparamenta de Media TensiónDocumento28 páginasGuía de La Aparamenta de Media TensiónRodrigoAinda não há avaliações
- Ejercicio LogoDocumento6 páginasEjercicio LogojosbullAinda não há avaliações
- Guia Rapid A Cast 60Documento24 páginasGuia Rapid A Cast 60Pablito Alfa GtAinda não há avaliações
- Protección DiferencialDocumento65 páginasProtección DiferencialAlex M.P.Ainda não há avaliações
- Domotica Con s7-200Documento37 páginasDomotica Con s7-200Pablo Alarcon JaraAinda não há avaliações
- Practica3 Configuracion y Uso de Entradas y Salidas Del PLC s7 1200 FINALDocumento16 páginasPractica3 Configuracion y Uso de Entradas y Salidas Del PLC s7 1200 FINALJuan Andres Tapia SeguraAinda não há avaliações
- Spasado15-2 ELT2590Documento35 páginasSpasado15-2 ELT2590Elvis C CAinda não há avaliações
- Manual Mantenimiento de CitofoníaDocumento4 páginasManual Mantenimiento de CitofoníaNonon Portox NononAinda não há avaliações
- Sensor de Proximidad Capacitivo LJC18A3-H-Z - BX - Naylamp Mechatronics - PerúDocumento4 páginasSensor de Proximidad Capacitivo LJC18A3-H-Z - BX - Naylamp Mechatronics - PerúElizabeth Bañaga SuarezAinda não há avaliações
- IV congreso internacional de ingenierías: La ingeniería como base del desarrolloNo EverandIV congreso internacional de ingenierías: La ingeniería como base del desarrolloAinda não há avaliações
- Sensores y ActuadoresDocumento55 páginasSensores y ActuadoresRuben AmayaAinda não há avaliações
- Sensores y ActuadoresDocumento44 páginasSensores y ActuadoresDIEGO ALBERTO HUAMAN BARRIENTOSAinda não há avaliações
- 1.4 Sensores de ProximidadDocumento5 páginas1.4 Sensores de ProximidadAlexis Bran AraizAinda não há avaliações
- Sensor de ProximidadDocumento14 páginasSensor de ProximidadCarlos Natanael Morales MandujanoAinda não há avaliações
- Unidad 2. - SensoresDocumento66 páginasUnidad 2. - SensoresAxel De PapelAinda não há avaliações
- 3 - Detectores ProximidadDocumento40 páginas3 - Detectores ProximidadZaki nouiAinda não há avaliações
- Manual Tecnico SensoresDocumento23 páginasManual Tecnico SensoresMichelángelo MichAinda não há avaliações
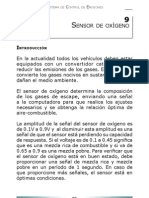
- Sensor de OxigenoDocumento13 páginasSensor de OxigenoEdgar SanchezAinda não há avaliações
- Sensores y ActuadoresDocumento28 páginasSensores y ActuadoresMiguel Angel Mayma CahuaAinda não há avaliações
- Sensores y ActuadoresDocumento28 páginasSensores y ActuadoresMiguel Angel Mayma CahuaAinda não há avaliações
- Sensores y Autadores PDFDocumento44 páginasSensores y Autadores PDFMiguel Angel Mayma CahuaAinda não há avaliações
- Manual Tecnico SensoresDocumento23 páginasManual Tecnico SensoresMichelángelo MichAinda não há avaliações