Você também pode gostar
- CHE 322 - Gaseous Fuel ProblemsDocumento26 páginasCHE 322 - Gaseous Fuel ProblemsDanice LunaAinda não há avaliações
- Advanced Digital Systems DesignDocumento12 páginasAdvanced Digital Systems DesignlawrencerajasekaranAinda não há avaliações
- DPSD 2 MarksDocumento23 páginasDPSD 2 Marksbanthika3937Ainda não há avaliações
- ASICandFPGA Finalco1andco2Documento75 páginasASICandFPGA Finalco1andco2Jallapally sai chandanaAinda não há avaliações
- Lab 14Documento11 páginasLab 14amalkatribAinda não há avaliações
- Lecture 4 S110Documento21 páginasLecture 4 S110cikghuAinda não há avaliações
- ECE 368, Fall 2006Documento12 páginasECE 368, Fall 2006RajneeshKandimallaAinda não há avaliações
- Combinational Logic CircuitDocumento29 páginasCombinational Logic CircuitKalkidan SisayAinda não há avaliações
- DPSD Model Question Bank With AnswersDocumento7 páginasDPSD Model Question Bank With AnswersAkash SanjeevAinda não há avaliações
- Vending MAchineDocumento22 páginasVending MAchineavireddy1100% (2)
- Cao-Notess by Girdhar Gopal Gautam 3gDocumento130 páginasCao-Notess by Girdhar Gopal Gautam 3gGirdhar Gopal GautamAinda não há avaliações
- COA Chap 123Documento46 páginasCOA Chap 123desAinda não há avaliações
- Ee529 Asg3Documento22 páginasEe529 Asg3dd23015Ainda não há avaliações
- Finite State MachinesDocumento8 páginasFinite State MachinesHnd FinalAinda não há avaliações
- Building The UpDocumento30 páginasBuilding The Upabhiii86Ainda não há avaliações
- Combinational CircuitsDocumento15 páginasCombinational CircuitsSrinivas ReddyAinda não há avaliações
- Digital Design With SystemVerilogDocumento58 páginasDigital Design With SystemVerilogStephen A. EdwardsAinda não há avaliações
- Unit 3Documento24 páginasUnit 3Raja BenitaAinda não há avaliações
- 8.0 Resolving Multi-Signal Drivers: 8.1 BusesDocumento20 páginas8.0 Resolving Multi-Signal Drivers: 8.1 BusesAvirup MullickAinda não há avaliações
- What Is Meant by Register TransferDocumento4 páginasWhat Is Meant by Register TransferSiva GuruAinda não há avaliações
- DDCO Model Paper SolvedDocumento33 páginasDDCO Model Paper SolvedPraneethAinda não há avaliações
- Cadence - Virtuoso: Amity UniversityDocumento27 páginasCadence - Virtuoso: Amity UniversityAkhil Aggarwal100% (1)
- Chapter #8: Finite State Machine DesignDocumento57 páginasChapter #8: Finite State Machine DesignAli AhmadAinda não há avaliações
- Unit - 1 DSDDocumento56 páginasUnit - 1 DSDultimatekp144Ainda não há avaliações
- GATE+ISRO DIGITAL LOGIC AND COMPUTER ORGANIZATION 2015 - Sequential CircuitsDocumento35 páginasGATE+ISRO DIGITAL LOGIC AND COMPUTER ORGANIZATION 2015 - Sequential CircuitsRejinRajanAinda não há avaliações
- Midterm f02 SolutionsDocumento9 páginasMidterm f02 SolutionsAli NasserAinda não há avaliações
- DCS-2 Practical File Part-1Documento26 páginasDCS-2 Practical File Part-1ykr007Ainda não há avaliações
- University of Tehran Electrical and Computer Engineering Department ECE 517-3586 Logic Design, Test # 2 Spring Semester 1376-1377 Week of Lecture 32Documento7 páginasUniversity of Tehran Electrical and Computer Engineering Department ECE 517-3586 Logic Design, Test # 2 Spring Semester 1376-1377 Week of Lecture 32Joly SinhaAinda não há avaliações
- Master SetDocumento624 páginasMaster SetEr Lokesh MahorAinda não há avaliações
- HET202 Final Examination Sem 2 2006Documento21 páginasHET202 Final Examination Sem 2 2006Kai JieAinda não há avaliações
- Ovation Advanced Control Algorithms: PredictorDocumento10 páginasOvation Advanced Control Algorithms: PredictorMuhammad UsmanAinda não há avaliações
- VGGVDocumento32 páginasVGGVpoiuret isthisgoodAinda não há avaliações
- DSD Lab Manual AitdDocumento31 páginasDSD Lab Manual Aitdprathameshbhat88Ainda não há avaliações
- Data Logic Desgin - Combinational Logic CircuitsDocumento28 páginasData Logic Desgin - Combinational Logic CircuitsNabiha RazaAinda não há avaliações
- Aim: Hardware RequiredDocumento12 páginasAim: Hardware RequiredfjhgfiuyufyjAinda não há avaliações
- Enel3de IntrosequentialcircuitsDocumento49 páginasEnel3de IntrosequentialcircuitsZamani MhlongoAinda não há avaliações
- Computer Science Notes: Digital and Analogue Circuit DesignDocumento52 páginasComputer Science Notes: Digital and Analogue Circuit DesignMuhammedAinda não há avaliações
- Logic GateDocumento12 páginasLogic Gateapi-254068557Ainda não há avaliações
- Appendix A. Verilog Examples: A.1 Combinational Logic StructuresDocumento14 páginasAppendix A. Verilog Examples: A.1 Combinational Logic StructuresTrenton LindholmAinda não há avaliações
- CMPT 250: Week 1 (Jan 7 - 11) 1 Formal Specification of Digital SystemsDocumento6 páginasCMPT 250: Week 1 (Jan 7 - 11) 1 Formal Specification of Digital SystemsCharlie ChakAinda não há avaliações
- Digital Filters in VHDL LabDocumento5 páginasDigital Filters in VHDL LabAli AhmadAinda não há avaliações
- Chapter 5Documento12 páginasChapter 5Sonia MadueñoAinda não há avaliações
- ESE63201 L4 Digital Logic ReviewDocumento12 páginasESE63201 L4 Digital Logic Reviewmohed_kamalAinda não há avaliações
- Custom Single Purpose Processor DesignDocumento24 páginasCustom Single Purpose Processor DesignAar Kay GautamAinda não há avaliações
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDocumento8 páginasA Comparative Study of Several Control Techniques Applied To A Boost ConverterSerhat GümüşAinda não há avaliações
- Chapter 1-1Documento25 páginasChapter 1-1AynalemAinda não há avaliações
- AE6505 Control EngineeringDocumento9 páginasAE6505 Control Engineeringsathesh waranAinda não há avaliações
- 5 - Logic CircuitsDocumento32 páginas5 - Logic CircuitsPrabath De SilvaAinda não há avaliações
- Terms Relevant To Verilog HDL - Module & Test Bench: Page 1 of 12Documento12 páginasTerms Relevant To Verilog HDL - Module & Test Bench: Page 1 of 12Sasi BhushanAinda não há avaliações
- Lect5 FSMDocumento23 páginasLect5 FSMSangeetha BajanthriAinda não há avaliações
- Verilog Session 1,2,3Documento68 páginasVerilog Session 1,2,3Santhos KumarAinda não há avaliações
- Practice ProblemsDocumento12 páginasPractice ProblemsTHAKUR SAHABAinda não há avaliações
- Verilog Hardware Description Language (HDL) : Why Use A HDLDocumento16 páginasVerilog Hardware Description Language (HDL) : Why Use A HDLkeyurAinda não há avaliações
- VHDL FSM UNIT 5 ET&T 7th SemDocumento22 páginasVHDL FSM UNIT 5 ET&T 7th SemDEEPA KUNWARAinda não há avaliações
- Lab 5Documento7 páginasLab 5Harish RamasubramanianAinda não há avaliações
- Lab 3 - Introduction To MATLAB: G(S) S (S + 1) (S + 2)Documento3 páginasLab 3 - Introduction To MATLAB: G(S) S (S + 1) (S + 2)saharAinda não há avaliações
- Rəqəmsal SistemlərDocumento5 páginasRəqəmsal SistemlərAsgeriAinda não há avaliações
- Combinatorial Algorithms: For Computers and CalculatorsNo EverandCombinatorial Algorithms: For Computers and CalculatorsNota: 4 de 5 estrelas4/5 (2)
- Basavarajbangi PDFDocumento1 páginaBasavarajbangi PDFJadesh ChandaAinda não há avaliações
- Basavarajbangi PDFDocumento1 páginaBasavarajbangi PDFJadesh ChandaAinda não há avaliações
- Object-Oriented Analysis and Modeling Using The Uml: Mcgraw-Hill/IrwinDocumento48 páginasObject-Oriented Analysis and Modeling Using The Uml: Mcgraw-Hill/IrwinJadesh ChandaAinda não há avaliações
- Vi Survival GuideDocumento6 páginasVi Survival GuideJadesh ChandaAinda não há avaliações
- 07 Sequence DiagramDocumento20 páginas07 Sequence DiagramJadesh ChandaAinda não há avaliações
- JqueryDocumento18 páginasJqueryJadesh Chanda100% (1)
- Basic Uses of The English Tenses PDFDocumento4 páginasBasic Uses of The English Tenses PDFSreeAinda não há avaliações
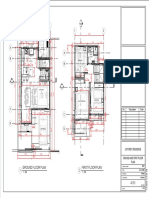
- Floor Plans & ElevationsDocumento6 páginasFloor Plans & Elevationsbryan cardonaAinda não há avaliações
- RDBMS and HTML Mock Test 1548845682056Documento18 páginasRDBMS and HTML Mock Test 1548845682056sanjay bhattAinda não há avaliações
- 2015 Audi q5 sq5 71153 PDFDocumento302 páginas2015 Audi q5 sq5 71153 PDFPraveen100% (1)
- Phys114 Ps 1Documento11 páginasPhys114 Ps 1Reine Amabel JarudaAinda não há avaliações
- 031 - Btech - 08 Sem PDFDocumento163 páginas031 - Btech - 08 Sem PDFtushant_juneja3470Ainda não há avaliações
- Detailed Lesson Plan in Science 5Documento5 páginasDetailed Lesson Plan in Science 5hs4fptm82gAinda não há avaliações
- Epson Eb-W22 ProjectorDocumento2 páginasEpson Eb-W22 Projectorandresboy123Ainda não há avaliações
- VAPORISERDocumento62 páginasVAPORISERAshish ChavanAinda não há avaliações
- REE Copy PDFDocumento9 páginasREE Copy PDFJake ZozobradoAinda não há avaliações
- Economics BasisDocumento14 páginasEconomics BasiskumarAinda não há avaliações
- Wri Method FigDocumento15 páginasWri Method Figsoumyadeep19478425Ainda não há avaliações
- AVR Interrupt Programming in Assembly and CDocumento38 páginasAVR Interrupt Programming in Assembly and CK142526 AlishanAinda não há avaliações
- AWV39 EAR42W: Acoustic Wall Ventilator Acoustic Window VentilatorDocumento1 páginaAWV39 EAR42W: Acoustic Wall Ventilator Acoustic Window Ventilatorrita_mendes_1Ainda não há avaliações
- Seamless Fiux Fored Wire - Megafil250Documento1 páginaSeamless Fiux Fored Wire - Megafil250SungJun ParkAinda não há avaliações
- Pre-Spud Checklist # 4Documento2 páginasPre-Spud Checklist # 4Yougchu LuanAinda não há avaliações
- Carte Tehnicădetector Metale GarretDocumento53 páginasCarte Tehnicădetector Metale Garretely_ely3395Ainda não há avaliações
- Op Amp TesterDocumento2 páginasOp Amp TesterPhay KhamAinda não há avaliações
- Fundamentals of Fluid Mechanics (5th Edition) - Munson, OkiishiDocumento818 páginasFundamentals of Fluid Mechanics (5th Edition) - Munson, OkiishiMohit Verma85% (20)
- SAP Hybris Thinking Outside The Box. PART 1Documento18 páginasSAP Hybris Thinking Outside The Box. PART 1Rauf AlievAinda não há avaliações
- Wireshark Protocol Help Product PreviewDocumento6 páginasWireshark Protocol Help Product Previewsunil1978Ainda não há avaliações
- Avaya Call History InterfaceDocumento76 páginasAvaya Call History InterfaceGarrido_Ainda não há avaliações
- Design Procedures For Dynamically Loaded Foundations Choice of Parameters For Equivalent Lumped SystemsDocumento11 páginasDesign Procedures For Dynamically Loaded Foundations Choice of Parameters For Equivalent Lumped SystemsAnonymous osfiXqUkAinda não há avaliações
- Cyclic Redundancy CheckDocumento3 páginasCyclic Redundancy CheckmeerashekarAinda não há avaliações
- Vertical Take Off and LandingDocumento126 páginasVertical Take Off and LandingMukesh JindalAinda não há avaliações
- MET Till DEC 2018 PDFDocumento171 páginasMET Till DEC 2018 PDFt.srinivasanAinda não há avaliações
- Omron ManualDocumento44 páginasOmron ManualHaroDavidAinda não há avaliações
- Cooling Water BasicsDocumento163 páginasCooling Water BasicsEduardo Castillo100% (1)
- Project Based Lab Report ON Voting Information System: K L UniversityDocumento13 páginasProject Based Lab Report ON Voting Information System: K L UniversitySai Gargeya100% (1)
- Surveying Civil Engineering Pictorial Booklet 15 English MediumDocumento125 páginasSurveying Civil Engineering Pictorial Booklet 15 English MediumtnstcnpalanisamyAinda não há avaliações