Você também pode gostar
- Calculo Vectorial Unidad 2Documento30 páginasCalculo Vectorial Unidad 2LUZ PEREZ100% (4)
- Definiciones de Distintos Tipos de Sistemas MatematicosDocumento21 páginasDefiniciones de Distintos Tipos de Sistemas MatematicosAugusto LismayesAinda não há avaliações
- Análisis Matemático - Derivación-OptimizaciónDocumento3 páginasAnálisis Matemático - Derivación-OptimizaciónCarlos SantistebanAinda não há avaliações
- Control ModernoDocumento14 páginasControl Modernogarcia.201026329Ainda não há avaliações
- Estabilidad de LYAPUNOVDocumento11 páginasEstabilidad de LYAPUNOVRonyVargasAinda não há avaliações
- Retratos de Fase y EstabilidadDocumento18 páginasRetratos de Fase y EstabilidadjoserayanAinda não há avaliações
- Tarea. Sistemas Discretos. Liapunov.Documento10 páginasTarea. Sistemas Discretos. Liapunov.Victor JuárezAinda não há avaliações
- Método LyapunovDocumento7 páginasMétodo LyapunovErick HernándezAinda não há avaliações
- Espacio FaseDocumento29 páginasEspacio FasescribdparadoxAinda não há avaliações
- QFII c5Documento16 páginasQFII c5Rodrigo GarciaAinda não há avaliações
- Estabilidad LyapunovDocumento10 páginasEstabilidad LyapunovSantiago Vergara HernandezAinda não há avaliações
- Sistemas No Lineales Ecuaciones DiferencialesDocumento28 páginasSistemas No Lineales Ecuaciones DiferencialesjuztliAinda não há avaliações
- Practica 3Documento12 páginasPractica 3KurokoSanchezAinda não há avaliações
- LyapunovDocumento11 páginasLyapunovManuel BautistaAinda não há avaliações
- EcuacionesDocumento3 páginasEcuacionesSelma Albuquerque WexelAinda não há avaliações
- FM03 Tema 2Documento23 páginasFM03 Tema 2Mauricio TorresAinda não há avaliações
- DinMaq U4 Nov6 2023Documento20 páginasDinMaq U4 Nov6 2023Ingenieria Jr GSMAinda não há avaliações
- Rectificador Negativo Monofásico de Onda Completa No Controlado Con Carga Rle CosenoidalDocumento6 páginasRectificador Negativo Monofásico de Onda Completa No Controlado Con Carga Rle CosenoidalWILLIAM FERNEY RINCON MELOAinda não há avaliações
- AyCP Ejercicios Tema1 SOLUCIONES 2020Documento18 páginasAyCP Ejercicios Tema1 SOLUCIONES 2020peposasunaAinda não há avaliações
- LyapunovDocumento8 páginasLyapunovlu casAinda não há avaliações
- Sesión 03.dinámicaDocumento11 páginasSesión 03.dinámicaJhon Antony Omonte VargasAinda não há avaliações
- Sistemas Tiempo Continuo y DiscretoDocumento7 páginasSistemas Tiempo Continuo y DiscretoWilliam QuimbitaAinda não há avaliações
- VG DDDocumento24 páginasVG DDKevin RojasAinda não há avaliações
- Memorias CuánticaDocumento37 páginasMemorias CuánticaJuan David Escobar CruzAinda não há avaliações
- Medi2 U3 A2 Raic PDFDocumento4 páginasMedi2 U3 A2 Raic PDFRaúl Sánchez100% (1)
- Preguntas Teoricas de Matematicas Avanzada..Documento14 páginasPreguntas Teoricas de Matematicas Avanzada..AbrahamRenteriaAinda não há avaliações
- Fenomenos de TransporteDocumento19 páginasFenomenos de TransporteYesy EstradaAinda não há avaliações
- Práctica 3Documento6 páginasPráctica 3Jesus Josué González GutiérrezAinda não há avaliações
- Estabilidad LyapunovDocumento11 páginasEstabilidad LyapunovRuben RaygosaAinda não há avaliações
- Sistema Péndulo CarretillaDocumento17 páginasSistema Péndulo CarretillaJosé MartínezAinda não há avaliações
- PQF-02-Superficies D'energia Potencial I CaracteritzacioDocumento21 páginasPQF-02-Superficies D'energia Potencial I CaracteritzacioOrlando PayaresAinda não há avaliações
- Minimos Cuadrados InformeDocumento9 páginasMinimos Cuadrados InformeSamuel RamírezAinda não há avaliações
- Tarea2 203042 27Documento29 páginasTarea2 203042 27Cristian Baez100% (1)
- RESUMENDocumento7 páginasRESUMENJhosephFlorRiveraAinda não há avaliações
- La Teoria de Lyapunov y Aplicación de PenduloDocumento10 páginasLa Teoria de Lyapunov y Aplicación de Pendulocorpses88Ainda não há avaliações
- Flujo IrrotacionalDocumento8 páginasFlujo IrrotacionalVyktor Leon100% (1)
- PReparcial 2Documento3 páginasPReparcial 2Cristian Rodriguez100% (1)
- Resumen - Tema - 6 - Rectas y PlanosDocumento17 páginasResumen - Tema - 6 - Rectas y PlanosDaniel GonzaloAinda não há avaliações
- 14 - Parametrización de CurvasDocumento27 páginas14 - Parametrización de CurvasSOLANGE TERESA CASA QUISPEAinda não há avaliações
- 7 EstabilidadDocumento57 páginas7 EstabilidadChristian VelazquezAinda não há avaliações
- Compensación de Redes Planas Por El Método ParamétricoDocumento26 páginasCompensación de Redes Planas Por El Método ParamétricoEncuestas LuzAinda não há avaliações
- Cap 4Documento15 páginasCap 4Hernan MelmothAinda não há avaliações
- Labo de Forma Canónica en Espacio de EstadosDocumento11 páginasLabo de Forma Canónica en Espacio de EstadosMichael Infantes HuacancaAinda não há avaliações
- 02ecuaciones Empiricas - Movimiento Rectilineo Uniformemente VariadoDocumento10 páginas02ecuaciones Empiricas - Movimiento Rectilineo Uniformemente VariadoTana AllysonAinda não há avaliações
- Segundo Metodo de LiapunovDocumento27 páginasSegundo Metodo de Liapunovtatiana chaconAinda não há avaliações
- Postulados Mecanica CuanticaDocumento24 páginasPostulados Mecanica CuanticaRichard PachacamaAinda não há avaliações
- LorentzDocumento11 páginasLorentzPaola GalvisAinda não há avaliações
- CAP 2 372cDocumento30 páginasCAP 2 372cElmer Ariel Aguilar TorrezAinda não há avaliações
- Practica 2 CVECTDocumento9 páginasPractica 2 CVECTGUADALUPE SÁNCHEZ VÁZQUEZAinda não há avaliações
- Istemas No Lineales T: Eoremas Conversos Y de InvarianciaDocumento26 páginasIstemas No Lineales T: Eoremas Conversos Y de Invarianciasara garceteAinda não há avaliações
- Convolucion de Funciones DiscretasDocumento22 páginasConvolucion de Funciones DiscretasAmabiles nuezAinda não há avaliações
- Presentación U3Documento17 páginasPresentación U3Gustavo TellezAinda não há avaliações
- Unidad de Autoaprendizaje 05: Sistemas No Lineales Representación de Sistemas FísicosDocumento28 páginasUnidad de Autoaprendizaje 05: Sistemas No Lineales Representación de Sistemas FísicosBob QuinteroAinda não há avaliações
- Funcion DescriptivaDocumento21 páginasFuncion DescriptivaDerlis Romero75% (4)
- Ecuaciones Empiricas Fisica IDocumento10 páginasEcuaciones Empiricas Fisica IJaime IbarraAinda não há avaliações
- Informe Ecuaciones EmpiricasDocumento23 páginasInforme Ecuaciones Empiricasalexis edgardo cruzado ramírezAinda não há avaliações
- A.R.T. Mantenimiento A PlantaDocumento2 páginasA.R.T. Mantenimiento A Plantajimmy_caolAinda não há avaliações
- 02 Caract Part Terminales 15 KV S.PDocumento4 páginas02 Caract Part Terminales 15 KV S.Pjimmy_caolAinda não há avaliações
- Compuerta Contra Incendio Cci 48X34Documento1 páginaCompuerta Contra Incendio Cci 48X34jimmy_caolAinda não há avaliações
- Plano Base Piramidal PDFDocumento1 páginaPlano Base Piramidal PDFjimmy_caolAinda não há avaliações
- Eaton RoyerDocumento256 páginasEaton Royerjimmy_caolAinda não há avaliações
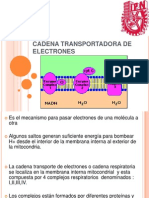
- Cadena Transport Ad or A de ElectronesDocumento17 páginasCadena Transport Ad or A de Electronesjimmy_caolAinda não há avaliações
- Conjuntos NuméricosDocumento6 páginasConjuntos NuméricosMaicol Antonio MariaAinda não há avaliações
- U2 ModelosdeProgramacionLineal-1Documento29 páginasU2 ModelosdeProgramacionLineal-1Rosario RiosAinda não há avaliações
- I. 3 Ii. - Iii. IVDocumento10 páginasI. 3 Ii. - Iii. IVwhamondtAinda não há avaliações
- Maximos y MinimosDocumento2 páginasMaximos y MinimosLuis Nina PonceAinda não há avaliações
- Trabajo Colaborativo Cálculo I 2018 02Documento11 páginasTrabajo Colaborativo Cálculo I 2018 02Vanesa AlbarracinAinda não há avaliações
- Algebra 2 AssessmentDocumento64 páginasAlgebra 2 AssessmentAlgebraw Gomez100% (1)
- Tasa de Crecimiento Matematico GompersDocumento5 páginasTasa de Crecimiento Matematico GompersJORGESABASAinda não há avaliações
- Algebra Lineal Matriz InversaDocumento3 páginasAlgebra Lineal Matriz InversaAnonymous mfiG2SAinda não há avaliações
- PLAN DE CLASE 5 Caso I, II Y III DE FACTORIZACIONDocumento6 páginasPLAN DE CLASE 5 Caso I, II Y III DE FACTORIZACIONJhon Garcia100% (1)
- Archivo Integración Inmediata PDFDocumento24 páginasArchivo Integración Inmediata PDFMelissa Rivera CaballeroAinda não há avaliações
- Formulario Definitivo de Cálculo II PDFDocumento4 páginasFormulario Definitivo de Cálculo II PDFismaAinda não há avaliações
- Medidas Centrales Recargado - DocmDocumento12 páginasMedidas Centrales Recargado - DocmNatalia BermudezAinda não há avaliações
- Guia Rotaciones 1 MedioDocumento2 páginasGuia Rotaciones 1 MedioDami Canales GonzalezAinda não há avaliações
- ÁlgebraDocumento14 páginasÁlgebraLuis Enrique Toledo MuñozAinda não há avaliações
- Actividad de Puntos Evaluables - Escenario 6 - PRIMER BLOQUE-CIENCIAS BASICAS - METODOS NUMERICOS - (GRUPO B02)Documento4 páginasActividad de Puntos Evaluables - Escenario 6 - PRIMER BLOQUE-CIENCIAS BASICAS - METODOS NUMERICOS - (GRUPO B02)Sebastián MontealegreAinda não há avaliações
- MATRICESDocumento17 páginasMATRICESAndy DiazAinda não há avaliações
- Calculo Integral (Figuras Amorfas)Documento8 páginasCalculo Integral (Figuras Amorfas)Josue JimenezAinda não há avaliações
- Sistemas de Ecuaciones LinealesDocumento7 páginasSistemas de Ecuaciones LinealesAntonella OlmosAinda não há avaliações
- Bases Prolog Ma Tic ADocumento10 páginasBases Prolog Ma Tic ALuis Rodrigo Romero LévanoAinda não há avaliações
- Guia de Simplificacion y Racionalizacion AlgebraicaDocumento21 páginasGuia de Simplificacion y Racionalizacion AlgebraicaAlejandro Piñeiro CaroAinda não há avaliações
- Calculo IV Funciones de Variable Compleja FIUCVDocumento5 páginasCalculo IV Funciones de Variable Compleja FIUCVRuben HernandezAinda não há avaliações
- Logaritmación de Números Naturales: Taller Completar La Siguiente TablaDocumento2 páginasLogaritmación de Números Naturales: Taller Completar La Siguiente TablajuridicaAinda não há avaliações
- Silabo Calculo Ii Ing CivilDocumento3 páginasSilabo Calculo Ii Ing CivilJames Sanchez PerezAinda não há avaliações
- Interpolación Mediante TrazadoresDocumento15 páginasInterpolación Mediante TrazadoresSebas CuevaAinda não há avaliações
- Medidas de Dispersion, As, AP.Documento24 páginasMedidas de Dispersion, As, AP.Rossa TasaycoAinda não há avaliações
- MM PmiiDocumento303 páginasMM PmiiAndreita GuiñaguazoAinda não há avaliações
- Notas de Clase para Precálculo Organized PDFDocumento6 páginasNotas de Clase para Precálculo Organized PDFChristian MoraAinda não há avaliações