Você também pode gostar
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Fyp-Hydraulic Brakes CompleteDocumento32 páginasFyp-Hydraulic Brakes CompleteRishabh JainAinda não há avaliações
- Police Log October 29, 2016Documento16 páginasPolice Log October 29, 2016MansfieldMAPoliceAinda não há avaliações
- GM BogieDocumento4 páginasGM BogieAyushKhattarAinda não há avaliações
- January 20, 2016 Tribune-PhonographDocumento16 páginasJanuary 20, 2016 Tribune-PhonographcwmediaAinda não há avaliações
- Shopping Mall - Project 2Documento100 páginasShopping Mall - Project 2Awadhesh YadavAinda não há avaliações
- Balance Sheet of BMW LAST YEARSDocumento13 páginasBalance Sheet of BMW LAST YEARSGianluca UbertiAinda não há avaliações
- Public Feedback On Connecticut LawsDocumento1.240 páginasPublic Feedback On Connecticut LawsGary JeanfaivreAinda não há avaliações
- Automobile Sales Funnel OptimizationDocumento14 páginasAutomobile Sales Funnel OptimizationDeepak JhaAinda não há avaliações
- Allcan300 V1-1 PDFDocumento1 páginaAllcan300 V1-1 PDFChris BelgaAinda não há avaliações
- Toyota Production SystemDocumento3 páginasToyota Production SystemMit BhattacharyaAinda não há avaliações
- AutoNation Shared Services Case Study Long FormDocumento3 páginasAutoNation Shared Services Case Study Long FormChiChanLyuAinda não há avaliações
- Emissions Control BrochureDocumento12 páginasEmissions Control BrochureAlliance Transport Technologies LtdAinda não há avaliações
- Watch Industry Report UK Market OutlookDocumento28 páginasWatch Industry Report UK Market Outlookmasood karimAinda não há avaliações
- API Standard 541 and 547: Petroleum and Chemical IndustriesDocumento4 páginasAPI Standard 541 and 547: Petroleum and Chemical IndustriesFaizal KhanAinda não há avaliações
- Business Basics: 1. What Is Business? 2. Careers in BusinessDocumento6 páginasBusiness Basics: 1. What Is Business? 2. Careers in BusinessSyamsul KoharAinda não há avaliações
- End Carriage DFW Bas LEDocumento12 páginasEnd Carriage DFW Bas LEcutenganAinda não há avaliações
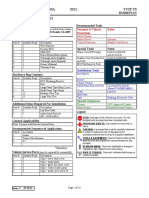
- Toyota Tacoma 2012 - Tvip V5 Part Number: PT398-35121: PreparationDocumento22 páginasToyota Tacoma 2012 - Tvip V5 Part Number: PT398-35121: PreparationTomas OrozcoAinda não há avaliações
- Abhishek Summer ProjectDocumento70 páginasAbhishek Summer ProjectAbhishek SharmaAinda não há avaliações
- Organization StudyDocumento90 páginasOrganization StudyJency Pj Ammu's100% (2)
- Nelson/Salmo Pennywise September 4, 2018Documento40 páginasNelson/Salmo Pennywise September 4, 2018Pennywise PublishingAinda não há avaliações
- Supply Chain ManagementDocumento35 páginasSupply Chain ManagementAarthee SundaramAinda não há avaliações
- BatteriesDocumento4 páginasBatteriesTushar RastogiAinda não há avaliações
- Chapters Particulars Page NoDocumento48 páginasChapters Particulars Page NoKuldeep ChauhanAinda não há avaliações
- Rajasthan Tourism Development Corporation LTDDocumento2 páginasRajasthan Tourism Development Corporation LTDTanuj SainiAinda não há avaliações
- Color-coded wires CascadiaDocumento1 páginaColor-coded wires CascadialuisAinda não há avaliações
- Bus ScheduleDocumento6 páginasBus SchedulesandipkshAinda não há avaliações
- Bodybuilder Wiring PDFDocumento5 páginasBodybuilder Wiring PDFIzz BaharAinda não há avaliações
- Gill 2016Documento10 páginasGill 2016HenryAinda não há avaliações
- Integrated SCM Fuels Automotive SuccessDocumento3 páginasIntegrated SCM Fuels Automotive Successanusha klAinda não há avaliações
- Atec Manual ElectronicDocumento73 páginasAtec Manual ElectronicMinaSaeed67% (3)