Você também pode gostar
- NADCAP AC7114 Rev FDocumento23 páginasNADCAP AC7114 Rev Famirkhakzad498Ainda não há avaliações
- Materials: Electrochemical Polishing of Austenitic Stainless SteelsDocumento25 páginasMaterials: Electrochemical Polishing of Austenitic Stainless SteelsSebin AbrahamAinda não há avaliações
- Sidhi Alcast: Product AuditDocumento4 páginasSidhi Alcast: Product AuditRohit BiriwalAinda não há avaliações
- Sub-Tier Control GuideDocumento10 páginasSub-Tier Control GuideJHBernardoAinda não há avaliações
- OP1111Documento5 páginasOP1111Umit AytarAinda não há avaliações
- VAAS Chlorine Service Ball Valves Design FeaturesDocumento14 páginasVAAS Chlorine Service Ball Valves Design FeaturesReddy SadhanaAinda não há avaliações
- Epicor10 ReleaseNotes 100700Documento60 páginasEpicor10 ReleaseNotes 100700DoraAinda não há avaliações
- CNC Machining Report - Premounting BaseDocumento19 páginasCNC Machining Report - Premounting BaseMichael M. W. de Silva50% (2)
- Norma Pipe Connections DIN-11864Documento17 páginasNorma Pipe Connections DIN-11864bioAinda não há avaliações
- Switchgear Room Inspection ChecklistDocumento7 páginasSwitchgear Room Inspection ChecklistEnginerShahzadGhaffarAinda não há avaliações
- Supplier Manual 16-11 Bosch Thermotechniek B.V 1Documento20 páginasSupplier Manual 16-11 Bosch Thermotechniek B.V 1LOGANATHAN VAinda não há avaliações
- Parker ATEX CatalogueDocumento52 páginasParker ATEX CatalogueSundrakumar RajuAinda não há avaliações
- Shell Catalogue 4190-MESCDocumento48 páginasShell Catalogue 4190-MESCMohd Firdaus Mohd NasirAinda não há avaliações
- 501-375 Testing Fieldbus Wiring With An FBT-6 and FBT-5Documento5 páginas501-375 Testing Fieldbus Wiring With An FBT-6 and FBT-5Exequiel PlazaAinda não há avaliações
- SP 2154Documento26 páginasSP 2154Anoop gokhaleAinda não há avaliações
- EU REACH and U.S. RegulationDocumento4 páginasEU REACH and U.S. Regulationchem_taAinda não há avaliações
- Value Stream Mapping Machine ShopDocumento19 páginasValue Stream Mapping Machine ShopVinoth VinoAinda não há avaliações
- Technical Specifications Renishaw Probing PDFDocumento72 páginasTechnical Specifications Renishaw Probing PDFmarianhainarosieAinda não há avaliações
- Forged Components Catalog For Pressure Vessel ConnectionsDocumento72 páginasForged Components Catalog For Pressure Vessel ConnectionsForged ComponentsAinda não há avaliações
- Workmanship Standards QE SeminarDocumento73 páginasWorkmanship Standards QE SeminarJuanPabloJimenezAinda não há avaliações
- LS030 1oxDocumento6 páginasLS030 1oxANILAinda não há avaliações
- Milling Speeds and Feeds PDFDocumento1 páginaMilling Speeds and Feeds PDFrobAinda não há avaliações
- Asme B18.16.6Documento1 páginaAsme B18.16.6Mario FonsecaAinda não há avaliações
- GMP ChecklistDocumento10 páginasGMP Checklistkang adeAinda não há avaliações
- EDM ManualDocumento11 páginasEDM ManualAdnan AnsariAinda não há avaliações
- ABC's of UV Measurement and Process Control November 2012Documento43 páginasABC's of UV Measurement and Process Control November 2012RLE2014Ainda não há avaliações
- Irradiance CalculationDocumento4 páginasIrradiance CalculationMaría Ester Oyarzún GuzmánAinda não há avaliações
- Reporting and Analyzing Occurrences: The DOE StandardDocumento123 páginasReporting and Analyzing Occurrences: The DOE StandardMarco RangelAinda não há avaliações
- Parker Hannifin Supplier Quality ManualDocumento32 páginasParker Hannifin Supplier Quality Manualimroz_ali90Ainda não há avaliações
- Quality Management System Requirements For National InspectoratesDocumento22 páginasQuality Management System Requirements For National InspectoratesNavnath TamhaneAinda não há avaliações
- Epicor10 UpdateGuide 10140028Documento20 páginasEpicor10 UpdateGuide 10140028Ratna DewiAinda não há avaliações
- BPE Manual PlusDocumento31 páginasBPE Manual PlusShreesh SharmaAinda não há avaliações
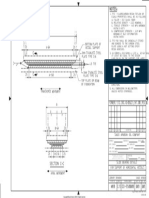
- DD 950008 001Documento1 páginaDD 950008 001Abu Anas M.SalaheldinAinda não há avaliações
- Nace and Norsok Compliant Valves: 1.0 SCOPEDocumento5 páginasNace and Norsok Compliant Valves: 1.0 SCOPEKaliya PerumalAinda não há avaliações
- ATEX DirectiveWikipediaDocumento5 páginasATEX DirectiveWikipediaFranz SchalkeAinda não há avaliações
- RB FORGING PRESENTATION FOR EDSCHA (Autosaved) 23 Dec 2019Documento82 páginasRB FORGING PRESENTATION FOR EDSCHA (Autosaved) 23 Dec 2019Ankur100% (1)
- En Data Sheet 1939 2577 2661 2707 2724 3013 3671 3696Documento12 páginasEn Data Sheet 1939 2577 2661 2707 2724 3013 3671 3696prabu maniAinda não há avaliações
- Good Manufacturing Practices-1Documento28 páginasGood Manufacturing Practices-1ramprasad battalaAinda não há avaliações
- Set Up TimeDocumento23 páginasSet Up TimemuneerppAinda não há avaliações
- SATR-J-6913 Rev 0 PDFDocumento6 páginasSATR-J-6913 Rev 0 PDFAdel KlkAinda não há avaliações
- Saudi Aramco Pipe Inspection RequirementsDocumento2 páginasSaudi Aramco Pipe Inspection RequirementsAbu Anas M.Salaheldin100% (1)
- 1.0 Fundamentals of CastingDocumento43 páginas1.0 Fundamentals of CastingLoo Tong ShianAinda não há avaliações
- Reach MemoDocumento9 páginasReach MemoNLaraSalAinda não há avaliações
- As71164a CHECK LISTDocumento9 páginasAs71164a CHECK LISTJulio HernandezAinda não há avaliações
- Welding Procedure Qualification of A36 Steel Plates Using The GTADocumento33 páginasWelding Procedure Qualification of A36 Steel Plates Using The GTAKYAW SOEAinda não há avaliações
- Equipment TroubleshootDocumento13 páginasEquipment TroubleshootManel Montesinos100% (1)
- Introduction to Mechatronics AssignmentDocumento11 páginasIntroduction to Mechatronics AssignmentbalajiAinda não há avaliações
- Table QW/QB-422 Ferrous and Nonferrous P-Numbers Grouping of Base Metals For QualificationDocumento1 páginaTable QW/QB-422 Ferrous and Nonferrous P-Numbers Grouping of Base Metals For QualificationArturo DuqueAinda não há avaliações
- Electropolished Tube - Electropolished Stainless Steel Tubing - Electropolish Tube - Rensa TubesDocumento13 páginasElectropolished Tube - Electropolished Stainless Steel Tubing - Electropolish Tube - Rensa TubesRupesh surveAinda não há avaliações
- CFSE CFSP Application Form 2018 1.0v-6Documento6 páginasCFSE CFSP Application Form 2018 1.0v-6Rifyan AlanaAinda não há avaliações
- Carpenterguidetomachining PDFDocumento170 páginasCarpenterguidetomachining PDFNitin AggarwalAinda não há avaliações
- Procedure Manual: Cast Valve ProductionDocumento10 páginasProcedure Manual: Cast Valve ProductionParveen Kohli0% (1)
- IAEA PPE SpecificationDocumento4 páginasIAEA PPE SpecificationRoberto CarlosAinda não há avaliações
- IPC A 610DC Telecom AddendumDocumento3 páginasIPC A 610DC Telecom Addendumfenriz666Ainda não há avaliações
- First Piece Apparoval Parameters MG & Motor LineDocumento14 páginasFirst Piece Apparoval Parameters MG & Motor LineNeha SharmaAinda não há avaliações
- Repair Procedure Patching Welded 30-L-P1-1490 BEKAPAI INCOMING LINE TLA AREA - SENIPAH FIELDDocumento14 páginasRepair Procedure Patching Welded 30-L-P1-1490 BEKAPAI INCOMING LINE TLA AREA - SENIPAH FIELDFerdie OSAinda não há avaliações
- Variable vs Absorption Costing: Income Statement ImpactDocumento69 páginasVariable vs Absorption Costing: Income Statement ImpactKaren AlonsagayAinda não há avaliações
- AC7102.1 Rev E FinalDocumento11 páginasAC7102.1 Rev E Finalshellfire6Ainda não há avaliações
- Supplier Quality Management A Complete Guide - 2021 EditionNo EverandSupplier Quality Management A Complete Guide - 2021 EditionAinda não há avaliações
- TransducerDocumento42 páginasTransducerShreyash SargarAinda não há avaliações
- 00002616Documento139 páginas00002616GIngaaAinda não há avaliações
- Failures of Cylinder Head Valves On G3500C and G3500E Generator Set Engines (1100, 1105, 1121)Documento5 páginasFailures of Cylinder Head Valves On G3500C and G3500E Generator Set Engines (1100, 1105, 1121)Ahmed Nahrawy100% (1)
- RMC Online Washing System Industrial Gas TurbineDocumento3 páginasRMC Online Washing System Industrial Gas TurbinepayamzarAinda não há avaliações
- Lecture 4 - Free EnergyDocumento16 páginasLecture 4 - Free EnergyyudhiprasetyoAinda não há avaliações
- Decoding NRCC PRF HandoutDocumento75 páginasDecoding NRCC PRF HandoutThomas ChanAinda não há avaliações
- L298 KitDocumento5 páginasL298 KitOmar AdelAinda não há avaliações
- GM Part List - D79 D69 Autres - D3908 DR PDFDocumento14 páginasGM Part List - D79 D69 Autres - D3908 DR PDFAbderrahmane AbdoAinda não há avaliações
- Robot Dynamics & Inverse KinematicsDocumento88 páginasRobot Dynamics & Inverse KinematicsasprillaAinda não há avaliações
- A Paper by Professor Geoff Duffy: Climate Emergency!! Where?Documento4 páginasA Paper by Professor Geoff Duffy: Climate Emergency!! Where?Juana AtkinsAinda não há avaliações
- Boylestad Electronics Multiple Choice Q&a ChapterDocumento6 páginasBoylestad Electronics Multiple Choice Q&a ChapterDenaiya Watton LeehAinda não há avaliações
- Ansi C84.1 2006Documento23 páginasAnsi C84.1 2006Yesica FonsecaAinda não há avaliações
- A25DA30D03diagrams PDFDocumento109 páginasA25DA30D03diagrams PDFcruz Tobilla100% (1)
- Spectra Printing Division 2006 AccessoriesDocumento16 páginasSpectra Printing Division 2006 Accessoriesironma71Ainda não há avaliações
- Almera n16 Europa Idx-K9kDocumento6 páginasAlmera n16 Europa Idx-K9kMARK llAinda não há avaliações
- Electrical, Electronic and Logic ComponentsDocumento29 páginasElectrical, Electronic and Logic ComponentsJomer JuanAinda não há avaliações
- Ellen McHenry The Elements SchemePDFDocumento3 páginasEllen McHenry The Elements SchemePDFscifreak64100% (1)
- Alarm ValveDocumento12 páginasAlarm ValveMusharaf ShahAinda não há avaliações
- Proportional Valve Group: Technical InformationDocumento76 páginasProportional Valve Group: Technical Informationsinou.25Ainda não há avaliações
- Cre S16Documento4 páginasCre S16vikas patheAinda não há avaliações
- POWER Power June 2022 IntlDocumento49 páginasPOWER Power June 2022 IntlNelson NavaAinda não há avaliações
- Epcm TMP in 1572 C1005 301 UnpriceDocumento6 páginasEpcm TMP in 1572 C1005 301 UnpriceBasten M H SilitongaAinda não há avaliações
- Master Instruction for SRI986 Electro-Pneumatic PositionerDocumento32 páginasMaster Instruction for SRI986 Electro-Pneumatic Positionerclebeson_pontalAinda não há avaliações
- Notice: Consumer Products Energy Conservation Program: Daikin U.S. Corp. Residential Air Conditioner and Heat Pump Procedures WaiverDocumento6 páginasNotice: Consumer Products Energy Conservation Program: Daikin U.S. Corp. Residential Air Conditioner and Heat Pump Procedures WaiverJustia.comAinda não há avaliações
- TM 5-2420-222-34 John Deere JD 410 Backhoe LoaderDocumento706 páginasTM 5-2420-222-34 John Deere JD 410 Backhoe LoaderAdvocate100% (2)
- 1 PDFDocumento2 páginas1 PDFRandy MorcoAinda não há avaliações
- Energy Band Theory in SolidsDocumento3 páginasEnergy Band Theory in Solidsashok pradhanAinda não há avaliações
- Safety ShoesDocumento13 páginasSafety ShoesyustimdAinda não há avaliações
- 6 FM CircuitsDocumento33 páginas6 FM CircuitsHitech Devices100% (1)
- Dynamic Balancing of Hydronic SystemsDocumento65 páginasDynamic Balancing of Hydronic Systems黃偉哲100% (4)
- Intelligent Building Automation SystemsDocumento27 páginasIntelligent Building Automation SystemsManu Manohar0% (1)