Você também pode gostar
- Modeling of Vibration in Single-Point Diamond TurningDocumento4 páginasModeling of Vibration in Single-Point Diamond Turningkndprasad01Ainda não há avaliações
- Blueprint Reading NAVEDTRA 14040 1994Documento200 páginasBlueprint Reading NAVEDTRA 14040 1994dawnk31297% (39)
- Senko ThesisDocumento86 páginasSenko Thesiskndprasad01Ainda não há avaliações
- Wang Invited Proc.7195 PhotonicsWest09 Vytran 2009Documento11 páginasWang Invited Proc.7195 PhotonicsWest09 Vytran 2009kndprasad01Ainda não há avaliações
- Testing of Curved Surfaces and or LensesDocumento45 páginasTesting of Curved Surfaces and or Lenseskndprasad01Ainda não há avaliações
- Electro Pneumatics TrainingDocumento2 páginasElectro Pneumatics Trainingkndprasad01Ainda não há avaliações
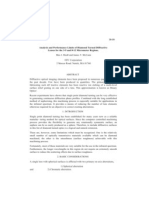
- Modeling of Vibration in Single-Point Diamond TurningDocumento4 páginasModeling of Vibration in Single-Point Diamond Turningkndprasad01Ainda não há avaliações
- Rapid Fabrication of Lightweight Silicon Carbide MirrorsDocumento11 páginasRapid Fabrication of Lightweight Silicon Carbide Mirrorskndprasad01Ainda não há avaliações
- Asphere Fabrication Goes Commercial-Part III-Machines On The MarketDocumento2 páginasAsphere Fabrication Goes Commercial-Part III-Machines On The Marketkndprasad01Ainda não há avaliações
- Asphere Fabrication Goes Commercial - Part I - Grinding and PolishingDocumento1 páginaAsphere Fabrication Goes Commercial - Part I - Grinding and Polishingkndprasad01Ainda não há avaliações
- Precesions Tooling For Polishing and Figuring Flat, Spherical and Aspheric SurfacesDocumento7 páginasPrecesions Tooling For Polishing and Figuring Flat, Spherical and Aspheric Surfaceskndprasad01Ainda não há avaliações
- Asphere Fabrication Goes Commercial-Part II - Computer-Controlled ManufacturingDocumento2 páginasAsphere Fabrication Goes Commercial-Part II - Computer-Controlled Manufacturingkndprasad01Ainda não há avaliações
- Optics Manufacturing Capabilities - BrochureDocumento12 páginasOptics Manufacturing Capabilities - Brochurekndprasad01100% (1)
- Optical Fabrication in The Optics Research GroupDocumento4 páginasOptical Fabrication in The Optics Research Groupkndprasad01Ainda não há avaliações
- FTSS 2 Operators Handbook DOSDocumento457 páginasFTSS 2 Operators Handbook DOSkndprasad01Ainda não há avaliações
- PensilvaniaDocumento2 páginasPensilvaniakndprasad01Ainda não há avaliações
- JBlanchard Lens Mounting With Elastomeric BondsDocumento7 páginasJBlanchard Lens Mounting With Elastomeric Bondskndprasad01Ainda não há avaliações
- Tutorial On ISO 10110 Optical Drawing StandardsDocumento18 páginasTutorial On ISO 10110 Optical Drawing Standardstolga1234Ainda não há avaliações
- IR DOE Lens PaperDocumento3 páginasIR DOE Lens Paperkndprasad01Ainda não há avaliações
- Manufacturing Electro Optics PlanDocumento40 páginasManufacturing Electro Optics Plankndprasad01Ainda não há avaliações
- Fabrication of Low-Loss GaN - AlN Waveguides For Nonlinear OpticsDocumento2 páginasFabrication of Low-Loss GaN - AlN Waveguides For Nonlinear Opticskndprasad01Ainda não há avaliações
- Fts Series 1 Handbook Rev 0Documento322 páginasFts Series 1 Handbook Rev 0kndprasad01Ainda não há avaliações
- Fabrication of Freeform OpticsDocumento3 páginasFabrication of Freeform Opticskndprasad01100% (1)
- LITHO2006 O ViherialaDocumento2 páginasLITHO2006 O Viherialakndprasad01Ainda não há avaliações
- Electronically Switchable Diffractive Optical ElementsDocumento6 páginasElectronically Switchable Diffractive Optical Elementskndprasad01Ainda não há avaliações
- DOE AnalysisDocumento11 páginasDOE Analysiskndprasad01Ainda não há avaliações
- Fresnel LensesDocumento12 páginasFresnel LensesAniruddha KushwahaAinda não há avaliações
- Fully Complex Diffractive OpticsDocumento14 páginasFully Complex Diffractive Opticskndprasad01Ainda não há avaliações
- Effects of Fabrication Errors in The Diffractive Optical Element On The Modulation Transfer Function of A Hybrid LensDocumento3 páginasEffects of Fabrication Errors in The Diffractive Optical Element On The Modulation Transfer Function of A Hybrid Lenskndprasad01Ainda não há avaliações
- Bios PapeDocumento12 páginasBios Papekndprasad01Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Introduction of ProtozoaDocumento31 páginasIntroduction of ProtozoaEINSTEIN2D100% (2)
- Preblending of Raw Materia1Documento26 páginasPreblending of Raw Materia1Mohammed Abdo100% (1)
- Multibody Dynamics Modeling and System Identification For A Quarter-Car Test Rig With McPherson Strut Suspension PDFDocumento122 páginasMultibody Dynamics Modeling and System Identification For A Quarter-Car Test Rig With McPherson Strut Suspension PDFnecromareAinda não há avaliações
- Preliminary Examination The Contemporary WorldDocumento2 páginasPreliminary Examination The Contemporary WorldJane M100% (1)
- Landcorp FLCC Brochure 2013 v3Documento6 páginasLandcorp FLCC Brochure 2013 v3Shadi GarmaAinda não há avaliações
- Case Study Managerial EconomicsDocumento4 páginasCase Study Managerial EconomicsZaza Afiza100% (1)
- Diazonium Salts Azo DyesDocumento8 páginasDiazonium Salts Azo DyesAnthony Basanta100% (1)
- Model No. TH-65JX850M/MF Chassis. 9K56T: LED TelevisionDocumento53 páginasModel No. TH-65JX850M/MF Chassis. 9K56T: LED TelevisionRavi ChandranAinda não há avaliações
- Alto Hotel Melbourne GreenDocumento2 páginasAlto Hotel Melbourne GreenShubham GuptaAinda não há avaliações
- MPPSC ACF Test Paper 8 (26 - 06 - 2022)Documento6 páginasMPPSC ACF Test Paper 8 (26 - 06 - 2022)Hari Harul VullangiAinda não há avaliações
- New Text DocumentDocumento13 páginasNew Text DocumentJitendra Karn RajputAinda não há avaliações
- 16-ELS-Final-Module 16-08082020Documento18 páginas16-ELS-Final-Module 16-08082020jeseca cincoAinda não há avaliações
- Ericsson For Sale From Powerstorm 4SA03071242Documento8 páginasEricsson For Sale From Powerstorm 4SA03071242wd3esaAinda não há avaliações
- Sinamics g120p Cabinet Catalog d35 en 2018Documento246 páginasSinamics g120p Cabinet Catalog d35 en 2018Edgar Lecona MAinda não há avaliações
- Influence of Freezing and Pasteurization of The Physical Condition of The Plastik (PE, PP and HDPE) As Selar Fish Packaging (Selaroides Leptolepis) in Sendang Biru, Malang, East Java. IndonesiaDocumento7 páginasInfluence of Freezing and Pasteurization of The Physical Condition of The Plastik (PE, PP and HDPE) As Selar Fish Packaging (Selaroides Leptolepis) in Sendang Biru, Malang, East Java. IndonesiaInternational Network For Natural SciencesAinda não há avaliações
- Fall 3050 SyllabusDocumento6 páginasFall 3050 Syllabustaher91Ainda não há avaliações
- Steve JobsDocumento18 páginasSteve JobsVibhor AggarwalAinda não há avaliações
- Annex A - Scope of WorkDocumento4 páginasAnnex A - Scope of Workمهيب سعيد الشميريAinda não há avaliações
- Eaai S 23 02045 PDFDocumento28 páginasEaai S 23 02045 PDFAnjali JainAinda não há avaliações
- One and Half SindromeDocumento4 páginasOne and Half SindromeYulia DamayantiAinda não há avaliações
- Pds Hempel's Maestro Water Borne Primer 28830 En-GbDocumento2 páginasPds Hempel's Maestro Water Borne Primer 28830 En-GbKalaiyazhagan ElangeeranAinda não há avaliações
- DR Afwan Fajri - Trauma - Juli 2023Documento82 páginasDR Afwan Fajri - Trauma - Juli 2023afwan fajriAinda não há avaliações
- (QII-L2) Decorate and Present Pastry ProductsDocumento30 páginas(QII-L2) Decorate and Present Pastry ProductsLD 07100% (1)
- دور أخلاقيات الأعمال في تحسين أداء المنظماتDocumento14 páginasدور أخلاقيات الأعمال في تحسين أداء المنظماتChaima LaifaAinda não há avaliações
- 50 Law-Firms Details by Vaibhav SharmaDocumento17 páginas50 Law-Firms Details by Vaibhav SharmaApoorva NandiniAinda não há avaliações
- 5 24077 Rev2 PDFDocumento3 páginas5 24077 Rev2 PDFJavier GarcíaAinda não há avaliações
- Genie PDFDocumento277 páginasGenie PDFOscar ItzolAinda não há avaliações
- Report On Monitoring and Evaluation-Ilagan CityDocumento5 páginasReport On Monitoring and Evaluation-Ilagan CityRonnie Francisco TejanoAinda não há avaliações
- Ducati WiringDocumento7 páginasDucati WiringRyan LeisAinda não há avaliações
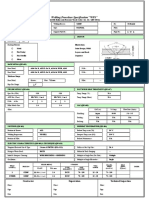
- Wps For Carbon Steel THK 7.11 GtawDocumento1 páginaWps For Carbon Steel THK 7.11 GtawAli MoosaviAinda não há avaliações