Você também pode gostar
- Cs33 - Data Structures Questions and AnswersDocumento26 páginasCs33 - Data Structures Questions and Answerssri1bhu288% (43)
- DSA Knowledge in Problem Solving and Data StructuresDocumento3 páginasDSA Knowledge in Problem Solving and Data StructuressampathaboAinda não há avaliações
- Design and Analysis of AlgorithmDocumento29 páginasDesign and Analysis of AlgorithmManishAinda não há avaliações
- CS2203 Object Oriented Programming NotesDocumento109 páginasCS2203 Object Oriented Programming NotesSudhakar Shan KAinda não há avaliações
- Cse V Database Management SystemsDocumento82 páginasCse V Database Management SystemsAbdul RehmanAinda não há avaliações
- Unit 1 Introduction To Data StructureDocumento41 páginasUnit 1 Introduction To Data StructureVansh ThakurAinda não há avaliações
- Data Structure Practical QuestionsDocumento5 páginasData Structure Practical QuestionsJayeeta nayak71% (7)
- Data Structures and AlgorithmDocumento35 páginasData Structures and Algorithmdan hernandoAinda não há avaliações
- Design and Analysis of Algorithms (DAA) NotesDocumento169 páginasDesign and Analysis of Algorithms (DAA) Notesvinod.shringi7870Ainda não há avaliações
- Py LabDocumento56 páginasPy LabmanoharAinda não há avaliações
- LINEAR DATA STRUCTURES TIME COMPLEXITYDocumento90 páginasLINEAR DATA STRUCTURES TIME COMPLEXITYKavialagan ArjunanAinda não há avaliações
- DBMS Complete Note PDFDocumento130 páginasDBMS Complete Note PDFSarwesh MaharzanAinda não há avaliações
- CPP Notes - Object Oriented Programming Using CPPDocumento22 páginasCPP Notes - Object Oriented Programming Using CPPKunal S KasarAinda não há avaliações
- Relational Database Management SystemDocumento194 páginasRelational Database Management SystemArun PrakashAinda não há avaliações
- 1-Analysis and Design F AlgorithmsDocumento83 páginas1-Analysis and Design F AlgorithmsKartik VermaAinda não há avaliações
- Object Oriented ProgrammingDocumento91 páginasObject Oriented ProgrammingManu Manu100% (1)
- Binary Trees and Graphs Terminology and RepresentationsDocumento69 páginasBinary Trees and Graphs Terminology and Representationskrishna100% (2)
- Department of Information TechnoloDocumento116 páginasDepartment of Information Technolodee pAinda não há avaliações
- Object Oriented Programming (Oop) Using C++: A Question BankDocumento51 páginasObject Oriented Programming (Oop) Using C++: A Question BankAnonymous cnS2art5Ainda não há avaliações
- Natural Language Processing NotesDocumento26 páginasNatural Language Processing NotescpasdAinda não há avaliações
- LeetCode OJDocumento6 páginasLeetCode OJkk198888Ainda não há avaliações
- An Introduction To Computer Architecture and Organization: Asmara AliasDocumento65 páginasAn Introduction To Computer Architecture and Organization: Asmara AliasarisashifaAinda não há avaliações
- A Data Structures and Algorithm Notes - FinalDocumento18 páginasA Data Structures and Algorithm Notes - Finalnana fosuAinda não há avaliações
- Ugc Net Exam Daa PDFDocumento94 páginasUgc Net Exam Daa PDFRamesh KaliaAinda não há avaliações
- Data StructuresDocumento32 páginasData StructuresAditya VikramAinda não há avaliações
- Data Structures A Algorithms Multiple Choice Questions Mcqs Objective Set 2Documento7 páginasData Structures A Algorithms Multiple Choice Questions Mcqs Objective Set 2trojan100tAinda não há avaliações
- CS8251 Programming in C-Question Bank With Answer KeysDocumento40 páginasCS8251 Programming in C-Question Bank With Answer KeysA Mary Aruldas80% (50)
- Dcap407 Data StructureDocumento270 páginasDcap407 Data StructureJagat Mishra100% (1)
- Data Structure Compiled NoteDocumento53 páginasData Structure Compiled NoteamanuelAinda não há avaliações
- CS304 Object Oriented Programming Final Term of 2012 Subjectives Solved With References by MoaazDocumento26 páginasCS304 Object Oriented Programming Final Term of 2012 Subjectives Solved With References by MoaazTayyabah Shah0% (1)
- CS 2201 - DATA STRUCTURES QUESTION BANKDocumento21 páginasCS 2201 - DATA STRUCTURES QUESTION BANKpitchrks19841Ainda não há avaliações
- Cs 8391-Data Structures 2 Marks With Answer: Unit I - Linear Structures - ListDocumento26 páginasCs 8391-Data Structures 2 Marks With Answer: Unit I - Linear Structures - ListMerbin JoseAinda não há avaliações
- Design and Analysis of Algorithms (DAA) NotesDocumento112 páginasDesign and Analysis of Algorithms (DAA) NotesMunavalli Matt K SAinda não há avaliações
- Daa QB 1 PDFDocumento24 páginasDaa QB 1 PDFSruthy SasiAinda não há avaliações
- Intro - To - Data Structure - Lec - 1Documento29 páginasIntro - To - Data Structure - Lec - 1Xafran KhanAinda não há avaliações
- Data Structures Chapter 3 SummaryDocumento4 páginasData Structures Chapter 3 SummaryExtra WorkAinda não há avaliações
- Data Structures QuestionsDocumento6 páginasData Structures Questionsraman.r.bhardwajAinda não há avaliações
- Ds Lecture NotesDocumento131 páginasDs Lecture Notessrushti mahaleAinda não há avaliações
- Introduction To Computer ArchitectureDocumento23 páginasIntroduction To Computer ArchitectureLwanga Charles Chas100% (1)
- Data Structure and AlgorithmDocumento12 páginasData Structure and Algorithmleah pileoAinda não há avaliações
- CS8451 DESIGN AND ANALYSIS OF ALGORITHMS QUESTION BANK - Watermark PDFDocumento47 páginasCS8451 DESIGN AND ANALYSIS OF ALGORITHMS QUESTION BANK - Watermark PDFneelakandan50% (2)
- 285 - OOPS Lecture Notes Complete PDFDocumento146 páginas285 - OOPS Lecture Notes Complete PDFfirstAinda não há avaliações
- DS-BCA403 Introduction to Data StructureDocumento94 páginasDS-BCA403 Introduction to Data Structureneerukumari1100% (1)
- Design and Analysis of AlgorithmsDocumento2 páginasDesign and Analysis of AlgorithmsNeemaAinda não há avaliações
- Computer Organization Concise NotesDocumento57 páginasComputer Organization Concise NoteschutiyaAinda não há avaliações
- Daa QBDocumento13 páginasDaa QBbabaAinda não há avaliações
- 280 - DS Complete PDFDocumento116 páginas280 - DS Complete PDFjagaenatorAinda não há avaliações
- Data Structures With C++Documento169 páginasData Structures With C++Rachna BhatnagarAinda não há avaliações
- MC0080 Analysis and Design of AlgorithmsDocumento15 páginasMC0080 Analysis and Design of AlgorithmsGaurav Singh JantwalAinda não há avaliações
- Dbms Aicte LabDocumento42 páginasDbms Aicte LabKaja AhmadAinda não há avaliações
- Lecture 2-Variables, Data Types and Arithmetic ExpressionsDocumento35 páginasLecture 2-Variables, Data Types and Arithmetic ExpressionsthienAinda não há avaliações
- Purpose of Language ProcessorsDocumento7 páginasPurpose of Language Processorsall4downloads100% (2)
- Descrete Structure SetsDocumento174 páginasDescrete Structure SetsGoyatAinda não há avaliações
- InfoTech Site Solved MCQ of Database Management System (DBMDocumento2 páginasInfoTech Site Solved MCQ of Database Management System (DBMmanoj24983Ainda não há avaliações
- Chaitin's Constant: An Uncomputable Number That Can Provide Insights Into Program HaltingDocumento8 páginasChaitin's Constant: An Uncomputable Number That Can Provide Insights Into Program HaltingMarcelo BesserAinda não há avaliações
- Topological SortingDocumento8 páginasTopological SortingGeorge fernandez.IAinda não há avaliações
- Relational ModelDocumento20 páginasRelational ModelMag CreationAinda não há avaliações
- 1.1 Basics of Data StructuresDocumento40 páginas1.1 Basics of Data StructuresMugi PawarAinda não há avaliações
- Learn Recursion Concepts and TechniquesDocumento38 páginasLearn Recursion Concepts and TechniquesanjugaduAinda não há avaliações
- Linked Lists and Stacks ExplainedDocumento4 páginasLinked Lists and Stacks ExplainedRenatus GodianAinda não há avaliações
- Data Structures 2 Marks and 16 Marks Question Bank With AnswersDocumento27 páginasData Structures 2 Marks and 16 Marks Question Bank With Answersrmeenakshi67% (3)
- DS Unit 1 QuestionsDocumento7 páginasDS Unit 1 QuestionsjoylindadeenaAinda não há avaliações
- Unit-I Linear StructuresDocumento5 páginasUnit-I Linear Structuresrajen789Ainda não há avaliações
- Data Structures Question BankDocumento19 páginasData Structures Question BankLn P Subramanian100% (1)
- Ec8393 - Fundamentals of Data Structures in C: Linear DatastructuresDocumento11 páginasEc8393 - Fundamentals of Data Structures in C: Linear DatastructuresRathiAinda não há avaliações
- Tntet Oct 2012 Paper 2 Ss Questions AnswersDocumento15 páginasTntet Oct 2012 Paper 2 Ss Questions AnswersAMU SHAHUL HAMEED100% (4)
- Alagappa University, Karaikudi Revised Syllabus Under Cbcs Pattern (W.E.F. 2011-12) B.B.A. Programme StructureDocumento23 páginasAlagappa University, Karaikudi Revised Syllabus Under Cbcs Pattern (W.E.F. 2011-12) B.B.A. Programme StructureMathan NaganAinda não há avaliações
- 2011 Batch Time TableDocumento43 páginas2011 Batch Time TableMathan NaganAinda não há avaliações
- 2011 Batch Time TableDocumento52 páginas2011 Batch Time TableMathan NaganAinda não há avaliações
- B.SC., Maths - 2011-12Documento23 páginasB.SC., Maths - 2011-12Mathan Nagan100% (1)
- Alagappa University, Karaikudi M.SC., Mathematics - Programme StructureDocumento33 páginasAlagappa University, Karaikudi M.SC., Mathematics - Programme StructureMathan NaganAinda não há avaliações
- Computer Graphics & MultimediaDocumento9 páginasComputer Graphics & MultimediaMathan NaganAinda não há avaliações
- Tntet Oct 2012 Paper 2 Ms Question Answers With Maths SolutionDocumento24 páginasTntet Oct 2012 Paper 2 Ms Question Answers With Maths SolutionAMU SHAHUL HAMEED50% (2)
- Alagappa Time Table Nov 2012Documento37 páginasAlagappa Time Table Nov 2012Mathan NaganAinda não há avaliações
- M.SC., - CS & IT - 2011-12Documento33 páginasM.SC., - CS & IT - 2011-12Mathan NaganAinda não há avaliações
- Programming C Lecture NotesDocumento50 páginasProgramming C Lecture NotesMathan Nagan100% (1)
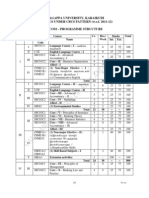
- Alagappa University, Karaikudi SYLLABUS UNDER CBCS PATTERN (W.e.f. 2011-12) B.SC., Information Technology - Programme StructureDocumento30 páginasAlagappa University, Karaikudi SYLLABUS UNDER CBCS PATTERN (W.e.f. 2011-12) B.SC., Information Technology - Programme StructureMathan NaganAinda não há avaliações
- DBMSDocumento13 páginasDBMSMathan NaganAinda não há avaliações
- PhotoshopDocumento626 páginasPhotoshopMathan NaganAinda não há avaliações
- Alagappa University Karaikudi SYLLABUS UNDER CBCS (W.e.f. 2011 - 12)Documento27 páginasAlagappa University Karaikudi SYLLABUS UNDER CBCS (W.e.f. 2011 - 12)Mathan NaganAinda não há avaliações
- Alagappa University, Karaikudi Revised Syllabus Under Cbcs Pattern (W.E.F. 2011-12) B.C.A. - Programme StructureDocumento28 páginasAlagappa University, Karaikudi Revised Syllabus Under Cbcs Pattern (W.E.F. 2011-12) B.C.A. - Programme StructureMathan Nagan100% (1)
- Mofg GH Gy Fiyf Fofk Fhiuf FB NGHJ Tpug GG GHLJ NJHT Kiw, SQ Fiy (GP.V.) Jkpo GHL Mikg Gfs 2011 - 12Documento19 páginasMofg GH Gy Fiyf Fofk Fhiuf FB NGHJ Tpug GG GHLJ NJHT Kiw, SQ Fiy (GP.V.) Jkpo GHL Mikg Gfs 2011 - 12Mathan NaganAinda não há avaliações
- Alagappa University, Karaikudi SYLLABUS UNDER CBCS PATTERN (W.e.f.2011-12) B.SC., Computer Science - Programme StructureDocumento27 páginasAlagappa University, Karaikudi SYLLABUS UNDER CBCS PATTERN (W.e.f.2011-12) B.SC., Computer Science - Programme StructureMathan NaganAinda não há avaliações
- Alagappa University, Karaikudi SYLLABUS UNDER CBCS PATTERN (W.e.f. 2011-12)Documento26 páginasAlagappa University, Karaikudi SYLLABUS UNDER CBCS PATTERN (W.e.f. 2011-12)Mathan NaganAinda não há avaliações
- Alagappa University, Karaikudi: B.A., English Literature - Programme StructureDocumento21 páginasAlagappa University, Karaikudi: B.A., English Literature - Programme StructureMathan Nagan100% (1)
- Alagappa University, Karaikudi Revised Syllabus Under Cbcs Pattern (W.E.F.2011-12) B.SC., Physics - Programme StructureDocumento30 páginasAlagappa University, Karaikudi Revised Syllabus Under Cbcs Pattern (W.E.F.2011-12) B.SC., Physics - Programme StructureMathan NaganAinda não há avaliações
- Alagappa University, Karaikudi Syllabus Under Cbcs Pattern (W.E.F 2011-12) B.SC., Bio-Chemistry - Programme StructureDocumento23 páginasAlagappa University, Karaikudi Syllabus Under Cbcs Pattern (W.E.F 2011-12) B.SC., Bio-Chemistry - Programme StructureMathan NaganAinda não há avaliações
- TimetableDocumento6 páginasTimetableMathan NaganAinda não há avaliações
- TimetableDocumento6 páginasTimetableMathan NaganAinda não há avaliações
- TNPSC Question Chemistry TNPSC Exam Question Answer Download ModelDocumento12 páginasTNPSC Question Chemistry TNPSC Exam Question Answer Download ModelRevathi RamachandranAinda não há avaliações
- TNPSC Omr ModelDocumento1 páginaTNPSC Omr ModelMathan NaganAinda não há avaliações
- TNPSC Group 4 Model Question Paper 2Documento20 páginasTNPSC Group 4 Model Question Paper 2training2jobs100% (1)
- TNPSC Group 2 Original Question Paper 2007 - General Knowledge and General TamilDocumento15 páginasTNPSC Group 2 Original Question Paper 2007 - General Knowledge and General Tamiltraining2jobsAinda não há avaliações
- 6th Social Science Question Bank 1Documento6 páginas6th Social Science Question Bank 1training2jobs79% (68)
- JSPM's Data Structure Programming LabDocumento81 páginasJSPM's Data Structure Programming Labchaitanya deshmukhAinda não há avaliações
- Literature Review On Crime File Management SystemDocumento7 páginasLiterature Review On Crime File Management SystemafdtzfutnAinda não há avaliações
- S3 Ktu 2016 CseDocumento31 páginasS3 Ktu 2016 Csereema luizAinda não há avaliações
- Swap Kth Nodes in Doubly Linked ListDocumento63 páginasSwap Kth Nodes in Doubly Linked ListHari VenkateshAinda não há avaliações
- Computer Science and Information Technology scqp09Documento3 páginasComputer Science and Information Technology scqp09AYAN AHMEDAinda não há avaliações
- Hsslive Xii Cs Key Model 2024.Documento5 páginasHsslive Xii Cs Key Model 2024.mavrick87654321Ainda não há avaliações
- Deltax NirajDocumento12 páginasDeltax Nirajhjindal2be19Ainda não há avaliações
- Code Analysis: CSE 373 Data Structures and AlgorithmsDocumento24 páginasCode Analysis: CSE 373 Data Structures and AlgorithmsTawsifAinda não há avaliações
- Cs301 Mid Term Mega FileDocumento30 páginasCs301 Mid Term Mega FileUsman Ghani JehanAinda não há avaliações
- FP Growth AlgorithmDocumento17 páginasFP Growth AlgorithmMostafa HeidaryAinda não há avaliações
- Data Structure SyllabusDocumento6 páginasData Structure Syllabusdarshansjadhav369Ainda não há avaliações
- Data Structure: Multiple Choice Questions & AnswersDocumento22 páginasData Structure: Multiple Choice Questions & AnswersSuresh KrishnanAinda não há avaliações
- 3rd Year SyllabusDocumento61 páginas3rd Year Syllabussachinkumardbg766Ainda não há avaliações
- Interview GuideDocumento24 páginasInterview GuideKroup ForeumAinda não há avaliações
- CS2208 2 Set3Documento2 páginasCS2208 2 Set3kaliappan45490Ainda não há avaliações
- Sem 3Documento84 páginasSem 3Brijen RakholiyaAinda não há avaliações
- IntroductionDocumento11 páginasIntroductionjainmanya1815Ainda não há avaliações
- Data Abstraction and Problem Solving With C++ Walls and Mirrors 7th Edition Carrano Test Bank DownloadDocumento5 páginasData Abstraction and Problem Solving With C++ Walls and Mirrors 7th Edition Carrano Test Bank DownloadJoseph Hays100% (19)
- SE Unipune SyllabusDocumento52 páginasSE Unipune SyllabusKhyati NirmalAinda não há avaliações
- 4 B.sc. II Computer Science (Entire) 2019-20Documento32 páginas4 B.sc. II Computer Science (Entire) 2019-20Abhi kashidAinda não há avaliações
- Data StructuresDocumento49 páginasData StructuresshalindraAinda não há avaliações
- Syllabus B.TechAI MLDocumento112 páginasSyllabus B.TechAI MLDarshit JoshiAinda não há avaliações
- CTPS Notes - Unit III (First Half)Documento22 páginasCTPS Notes - Unit III (First Half)M VAMSHI M VAMSHIAinda não há avaliações
- Data Structure Interview Questions and Answers For Freshers - SanfoundryDocumento8 páginasData Structure Interview Questions and Answers For Freshers - SanfoundryEzekiel JamesAinda não há avaliações
- C program interview questionsDocumento17 páginasC program interview questionsSelvamSathappanAinda não há avaliações