Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Storage Technology BasicsDocumento193 páginasStorage Technology BasicsphanisanyAinda não há avaliações
- STM32F3xx Training V1 - 2x PDFDocumento602 páginasSTM32F3xx Training V1 - 2x PDFVport Port100% (1)
- Full Adder VHDL Code Using Structural ModelingDocumento2 páginasFull Adder VHDL Code Using Structural ModelingOP2R91% (11)
- Anatomy of A Seed DeckDocumento42 páginasAnatomy of A Seed Deckwappy01Ainda não há avaliações
- TEDTalks As of 10.31.12 - Ooooh SpoooookyDocumento104 páginasTEDTalks As of 10.31.12 - Ooooh SpoooookysavantkAinda não há avaliações
- Iscas2008-300 1027Documento4 páginasIscas2008-300 1027savantkAinda não há avaliações
- Low-Cost Hardware Profiling of Run-Time and Energy in FPGA Embedded ProcessorsDocumento8 páginasLow-Cost Hardware Profiling of Run-Time and Energy in FPGA Embedded ProcessorssavantkAinda não há avaliações
- 06239785Documento8 páginas06239785savantkAinda não há avaliações
- HLS Introduction Gajski Design and TestDocumento10 páginasHLS Introduction Gajski Design and TestspaulsAinda não há avaliações
- Legup: High-Level Synthesis For Fpga-Based Processor/Accelerator SystemsDocumento4 páginasLegup: High-Level Synthesis For Fpga-Based Processor/Accelerator SystemssavantkAinda não há avaliações
- Legup: High-Level Synthesis For Fpga-Based Processor/Accelerator SystemsDocumento4 páginasLegup: High-Level Synthesis For Fpga-Based Processor/Accelerator SystemssavantkAinda não há avaliações
- ShARE-IITB Application Form 2011Documento2 páginasShARE-IITB Application Form 2011savantkAinda não há avaliações
- Legup: An Open Source High-Level Synthesis Tool For Fpga-Based Processor/Accelerator SystemsDocumento25 páginasLegup: An Open Source High-Level Synthesis Tool For Fpga-Based Processor/Accelerator SystemssavantkAinda não há avaliações
- Legup-2 0Documento43 páginasLegup-2 0savantkAinda não há avaliações
- Graph NotesDocumento23 páginasGraph NotessavantkAinda não há avaliações
- Donate Bicycle Campaign 2010 ReportDocumento2 páginasDonate Bicycle Campaign 2010 ReportsavantkAinda não há avaliações
- An Efficient and Versatile Scheduling Algorithm Based On SDC FormulationDocumento6 páginasAn Efficient and Versatile Scheduling Algorithm Based On SDC FormulationsavantkAinda não há avaliações
- Opjems 2011Documento14 páginasOpjems 2011savantkAinda não há avaliações
- ME 119 Grades 11aprilDocumento68 páginasME 119 Grades 11aprilsavantkAinda não há avaliações
- Raaz Notes EE207 PDFDocumento37 páginasRaaz Notes EE207 PDFsavantkAinda não há avaliações
- Apio2011 EnglishDocumento6 páginasApio2011 EnglishsavantkAinda não há avaliações
- Termpaper EE112Documento12 páginasTermpaper EE112savantkAinda não há avaliações
- History MicroelectronicsDocumento39 páginasHistory Microelectronicssavantk100% (1)
- EE100supplementarynoteweek03 2Documento27 páginasEE100supplementarynoteweek03 2savantkAinda não há avaliações
- Mid Sem Timetable AugDocumento1 páginaMid Sem Timetable AugsavantkAinda não há avaliações
- Stellaris Lm4F120 Launchpad Evaluation Kit: Boosterpack Development GuideDocumento18 páginasStellaris Lm4F120 Launchpad Evaluation Kit: Boosterpack Development GuideWalter StewardAinda não há avaliações
- Rd1022 Lattice RGMII To GMII BridgeDocumento4 páginasRd1022 Lattice RGMII To GMII Bridgelim_mgAinda não há avaliações
- NGP 324 ControllerDocumento3 páginasNGP 324 ControllerAdrian BorleaAinda não há avaliações
- rh442 NotesDocumento26 páginasrh442 Notesindrajitnandi8161Ainda não há avaliações
- Vtu Lecture1Documento48 páginasVtu Lecture1hardikpatel20062006Ainda não há avaliações
- Ip5306 Reg V1.4Documento9 páginasIp5306 Reg V1.4Jonathan Llewellyn AndradaAinda não há avaliações
- CPLD/FPGA Programming and Eblocks Matrix MultimediaDocumento21 páginasCPLD/FPGA Programming and Eblocks Matrix MultimediaVahid PooreftekhariAinda não há avaliações
- Cache MemoryDocumento11 páginasCache MemoryDeepAinda não há avaliações
- BH6 EngDocumento99 páginasBH6 EngmnbvqwertAinda não há avaliações
- Dynamic Logical Processors For Hyper-Threading On HP-UX 11i v3Documento22 páginasDynamic Logical Processors For Hyper-Threading On HP-UX 11i v3Sladur BgAinda não há avaliações
- How to flash SPI EEPROM & restore APC with external programmerDocumento5 páginasHow to flash SPI EEPROM & restore APC with external programmersucrooAinda não há avaliações
- Enda Econ-485 Usb/Rs 485 - Rs 422 Converter: Technical SpecificationsDocumento2 páginasEnda Econ-485 Usb/Rs 485 - Rs 422 Converter: Technical SpecificationskaihaniAinda não há avaliações
- A. Anti-Static Mat C. Philips Head ScrewdriverDocumento6 páginasA. Anti-Static Mat C. Philips Head ScrewdriverHenry De los ReyesAinda não há avaliações
- VHDL Code For Right Shift RegisterDocumento2 páginasVHDL Code For Right Shift Registersklove123Ainda não há avaliações
- Flash Programming Solutions For The Tms320F28Xxx DSCS: Application ReportDocumento16 páginasFlash Programming Solutions For The Tms320F28Xxx DSCS: Application ReporttminhkcAinda não há avaliações
- 9800301C 8080 8085 Assembly Language Programming Manual Nov78Documento224 páginas9800301C 8080 8085 Assembly Language Programming Manual Nov78Rupam OjhaAinda não há avaliações
- 8051 Core Microcontroller & InterfacingDocumento45 páginas8051 Core Microcontroller & InterfacingsumitramotadeAinda não há avaliações
- State Diagrams and Flip Flops: Design and ImplementationDocumento11 páginasState Diagrams and Flip Flops: Design and ImplementationsunpreetkaurnandaAinda não há avaliações
- Verilog Modules Implementing Logic Gates & FSMDocumento4 páginasVerilog Modules Implementing Logic Gates & FSMsanjeewa29Ainda não há avaliações
- C64 - Fujitsu Analog To Digital Converter Evaluation Board LUKE-DKDocumento2 páginasC64 - Fujitsu Analog To Digital Converter Evaluation Board LUKE-DKFujitsu Semiconductor EuropeAinda não há avaliações
- DS Lecture 5Documento29 páginasDS Lecture 5CH HASEEB AMJADAinda não há avaliações
- VerilogDocumento194 páginasVerilogGagan KandraAinda não há avaliações
- Design and Implementation of a High-Speed Asynchronous FIFODocumento64 páginasDesign and Implementation of a High-Speed Asynchronous FIFOMustafa NasserAinda não há avaliações
- 74HC HCT237 CNV 2Documento10 páginas74HC HCT237 CNV 2MUHAMMAD SISWANTOROAinda não há avaliações
- Advanced Microprocessors-80286Documento12 páginasAdvanced Microprocessors-80286Aaron BrooksAinda não há avaliações
- Power Saving Using Microcontrollers: Why, How and ExamplesDocumento24 páginasPower Saving Using Microcontrollers: Why, How and ExamplesemaAinda não há avaliações
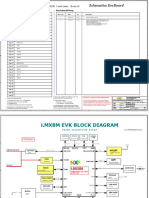
- i.MX8M EVK SchematicsDocumento23 páginasi.MX8M EVK SchematicshdsetanhdsetaAinda não há avaliações