Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Nn210-03 Chart Preparation Assignment UpdateDocumento9 páginasNn210-03 Chart Preparation Assignment UpdateTaylor DaBeast YorkAinda não há avaliações
- 10wknm23 PDFDocumento113 páginas10wknm23 PDFstep curryAinda não há avaliações
- Saab R5-Supreme-Navigation-System-Manual PDFDocumento164 páginasSaab R5-Supreme-Navigation-System-Manual PDFPrashant S Nagwekar100% (1)
- Writing For Humanities: Definitions We'll Start at 2.33Documento24 páginasWriting For Humanities: Definitions We'll Start at 2.33yovanaaaAinda não há avaliações
- Formulare Calcule NADocumento2 páginasFormulare Calcule NAClaudiu RachieruAinda não há avaliações
- UserGuide Sygic GPS Navigation Mobile v3 enDocumento61 páginasUserGuide Sygic GPS Navigation Mobile v3 enasot99Ainda não há avaliações
- Performance Based Navigation: The ICAO PBN ProgrammeDocumento35 páginasPerformance Based Navigation: The ICAO PBN ProgrammeDawood waheedAinda não há avaliações
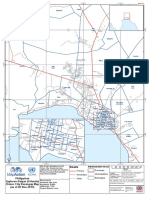
- Flooding Capalaba West Flood Flag MapDocumento1 páginaFlooding Capalaba West Flood Flag MapNgaire TaylorAinda não há avaliações
- Maritime Navigation PPT by DohertyDocumento65 páginasMaritime Navigation PPT by Dohertyprasad100% (2)
- Malacca Strait Sailing GuideDocumento2 páginasMalacca Strait Sailing GuideIya IyalahAinda não há avaliações
- Deficiency Codes For CG-835V and CG-5437B: USCG Office of Commercial Vessel Compliance (CG CVC)Documento7 páginasDeficiency Codes For CG-835V and CG-5437B: USCG Office of Commercial Vessel Compliance (CG CVC)Om Prakash RajAinda não há avaliações
- Gpsmap 400/500 Series: Owner's ManualDocumento72 páginasGpsmap 400/500 Series: Owner's ManualAndy JamesAinda não há avaliações
- Gpsmap 580/585: Chartplotter/Combo Fishfinder Owner's ManualDocumento98 páginasGpsmap 580/585: Chartplotter/Combo Fishfinder Owner's ManualfattaharisAinda não há avaliações
- AA 1355/28 JUL/MAN-LHR: - Not For Real World NavigationDocumento40 páginasAA 1355/28 JUL/MAN-LHR: - Not For Real World NavigationWaiZin MinHtetAinda não há avaliações
- Agnihotra Timings - Cerro Azul, PanamaDocumento3 páginasAgnihotra Timings - Cerro Azul, PanamaJoao PrezAinda não há avaliações
- 3directional Measuring InstrumentsDocumento34 páginas3directional Measuring InstrumentsEmmanuel RapadaAinda não há avaliações
- GP33 Dimensional Drawings: Specifications SpecificationsDocumento1 páginaGP33 Dimensional Drawings: Specifications SpecificationsDAFUAinda não há avaliações
- Classification of Human Errors in Gounding and Collision Accidents Using TRACEr TaxonomyDocumento13 páginasClassification of Human Errors in Gounding and Collision Accidents Using TRACEr Taxonomyinfo sme indiaAinda não há avaliações
- MA516 OrmocCityReference-300dpiDocumento1 páginaMA516 OrmocCityReference-300dpiRochie Mae LuceroAinda não há avaliações
- H1 - 1. Introduction ILS PDFDocumento38 páginasH1 - 1. Introduction ILS PDFmuhammad farhanAinda não há avaliações
- INS N IBSDocumento37 páginasINS N IBSamirsyawal87Ainda não há avaliações
- OpmanDocumento37 páginasOpmanAlex Ivern AlbaredaAinda não há avaliações
- IACS Unified Interpretation (UI)Documento74 páginasIACS Unified Interpretation (UI)Gelu TuraiAinda não há avaliações
- Proline 2 Flight-Line Maintenance Troubleshooting Flow ChartsDocumento14 páginasProline 2 Flight-Line Maintenance Troubleshooting Flow ChartsJuan Rodriguez100% (1)
- Epby ChartsDocumento2 páginasEpby ChartsjazzmanPLAinda não há avaliações
- Introducing SIRE 2.0 Industry Associations Awareness Session - 6 MayDocumento21 páginasIntroducing SIRE 2.0 Industry Associations Awareness Session - 6 Maysureen123100% (2)
- Map & Compass 101: - Parts & PiecesDocumento12 páginasMap & Compass 101: - Parts & PiecesBaluntang Eman ManuelAinda não há avaliações
- 7.01 - Master and Chief MateDocumento324 páginas7.01 - Master and Chief Materavilulla90% (10)
- Chapter 24 Azimuth - Theory Rev 1Documento5 páginasChapter 24 Azimuth - Theory Rev 1Stephen KingAinda não há avaliações
- ChecklistDocumento26 páginasChecklistmajdirossross100% (1)