Você também pode gostar
- Bomba de CobaltoDocumento3 páginasBomba de CobaltoLauraAinda não há avaliações
- Realizando Comparación Remota Entre Ambientes SAPDocumento7 páginasRealizando Comparación Remota Entre Ambientes SAPluislokox100% (1)
- INTRODUCCIÓN Minera JulitoDocumento21 páginasINTRODUCCIÓN Minera JulitoSergio APAinda não há avaliações
- Capitulo 5 Ccna2 ResumenDocumento33 páginasCapitulo 5 Ccna2 ResumenrectoAinda não há avaliações
- Importancia de Los Directivos CompetentesDocumento2 páginasImportancia de Los Directivos CompetentesCarlo Eduar Do HernandezAinda não há avaliações
- Curp 6Documento1 páginaCurp 6Netflix PremiumAinda não há avaliações
- Examen Auditores Internos (A)Documento5 páginasExamen Auditores Internos (A)Novita_100100% (1)
- Un Procesador Digital de Señales o DSPDocumento4 páginasUn Procesador Digital de Señales o DSPLucia TorresAinda não há avaliações
- Cortacero A 5090Documento1 páginaCortacero A 5090Jairo Antonio Ruiz JimenezAinda não há avaliações
- Instalación TecDren - V.2Documento8 páginasInstalación TecDren - V.2emy murilloAinda não há avaliações
- PDF ContableTeclabDocumento9 páginasPDF ContableTeclabJuanE.GarcíaMontovioAinda não há avaliações
- PDFDocumento55 páginasPDFPrimo SotoAinda não há avaliações
- ESTANDARIZACIONDocumento8 páginasESTANDARIZACIONFernando Luís Ventura RojasAinda não há avaliações
- Tema 2Documento14 páginasTema 2Francisco Omar Toral CoronaAinda não há avaliações
- Construcciones Tradicionales en MaderaDocumento60 páginasConstrucciones Tradicionales en MaderaJose Anton TorresAinda não há avaliações
- La TelemedicinaDocumento2 páginasLa TelemedicinaYarit Ortiz HernandezAinda não há avaliações
- Construccion II-cap Vii - Encofrados (r4)Documento151 páginasConstruccion II-cap Vii - Encofrados (r4)CONSTRUCCION275% (4)
- Plantilla Del PaperDocumento6 páginasPlantilla Del Paper44david100% (1)
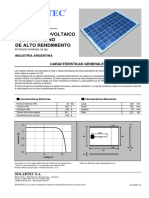
- SolartecDocumento1 páginaSolartecSyd BarrettAinda não há avaliações
- Manual en Español Descremador FJ130Documento11 páginasManual en Español Descremador FJ130Miles JohnsonAinda não há avaliações
- Estudiar Ingenieria Industrial Virtual PensumDocumento1 páginaEstudiar Ingenieria Industrial Virtual PensumOrlandoAinda não há avaliações
- COMPRENSION LECTORA 6 y 7Documento31 páginasCOMPRENSION LECTORA 6 y 7Victoria VeraAinda não há avaliações
- Lab 2 Array - V2Documento6 páginasLab 2 Array - V2Alex ChuctayaAinda não há avaliações
- Ficha Tecnica Herraje Inicio Fin Ai PDFDocumento1 páginaFicha Tecnica Herraje Inicio Fin Ai PDFAmericaInnovaAinda não há avaliações
- ANEXO 31. Asistencia Capacitacion - Entrada y Salida Contra ExternosDocumento1 páginaANEXO 31. Asistencia Capacitacion - Entrada y Salida Contra ExternossnspAinda não há avaliações
- ERP (Planificación de Recursos Empresariales o Enterprise Resource Planning)Documento4 páginasERP (Planificación de Recursos Empresariales o Enterprise Resource Planning)mariaAinda não há avaliações
- Revista Capeco - Precios Unitarios 2017Documento160 páginasRevista Capeco - Precios Unitarios 2017Hugo Taipe FrancoAinda não há avaliações
- Transferencia 200 AcDocumento2 páginasTransferencia 200 AcEfrain VelandiaAinda não há avaliações
- Renovacion Registro FDADocumento26 páginasRenovacion Registro FDAServitec CeibaAinda não há avaliações
- Tarea 2 Mapa ConceptualDocumento2 páginasTarea 2 Mapa ConceptualAitana PaolaAinda não há avaliações
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleNo EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleNota: 5 de 5 estrelas5/5 (3)
- Guía práctica para la refracción ocularNo EverandGuía práctica para la refracción ocularNota: 5 de 5 estrelas5/5 (2)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaNo EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaNota: 4 de 5 estrelas4/5 (32)
- Armónicas en Sistemas Eléctricos IndustrialesNo EverandArmónicas en Sistemas Eléctricos IndustrialesNota: 4.5 de 5 estrelas4.5/5 (12)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalNo EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalNota: 5 de 5 estrelas5/5 (3)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiNo EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiNota: 3.5 de 5 estrelas3.5/5 (5)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraNo EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraNota: 4.5 de 5 estrelas4.5/5 (5)