Você também pode gostar
- The Navigation and Control Technology Inside The AR - Drone Micro UAVDocumento8 páginasThe Navigation and Control Technology Inside The AR - Drone Micro UAVSergio Camilo Vasquez PazAinda não há avaliações
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNo EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentAinda não há avaliações
- Real-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterDocumento6 páginasReal-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterasdssAinda não há avaliações
- DroneDocumento6 páginasDroneMarcos FernandesAinda não há avaliações
- Quadcopter Master ThesisDocumento6 páginasQuadcopter Master ThesisHelpInWritingPaperUK100% (2)
- Interfacing Matlab-2591 PDFDocumento8 páginasInterfacing Matlab-2591 PDFBourrasAinda não há avaliações
- Nico LaLaguna PDFDocumento6 páginasNico LaLaguna PDFHassan FarssiAinda não há avaliações
- Mechanical Model For Quadcopter UAVDocumento86 páginasMechanical Model For Quadcopter UAVmatteoragni100% (2)
- Towards Intelligent Miniature Flying RobotsDocumento12 páginasTowards Intelligent Miniature Flying RobotsAlexandreSidantAinda não há avaliações
- Quadcopter PDFDocumento6 páginasQuadcopter PDFOla Fonda100% (1)
- Research Collection: PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorDocumento7 páginasResearch Collection: PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorEnes Muhammed TürkmenAinda não há avaliações
- Sensors 12 09566 v2 PDFDocumento20 páginasSensors 12 09566 v2 PDFsork93Ainda não há avaliações
- DroneDocumento8 páginasDroneAviAinda não há avaliações
- F 3400083614Documento4 páginasF 3400083614aminhardAinda não há avaliações
- Heba ElKholy Thesis S2014Documento13 páginasHeba ElKholy Thesis S2014AlexandraAndreeaAinda não há avaliações
- Aeronautical JournalDocumento24 páginasAeronautical JournalMAinda não há avaliações
- Final Year Project Report Latest VersionDocumento60 páginasFinal Year Project Report Latest VersionJames Dunthorne75% (4)
- Controller Design ThesisDocumento4 páginasController Design Thesisaprilgriffinbeaumont100% (2)
- Bou Abdallah 10 UavDocumento26 páginasBou Abdallah 10 UavNigel CartwrightAinda não há avaliações
- Sensor and Actuator Fault Detection in Small Autonomous HelicoptersDocumento10 páginasSensor and Actuator Fault Detection in Small Autonomous HelicoptersKarad KaradiasAinda não há avaliações
- A Survey On Open-Source Flight Control Platforms of Unmanned Aerial VehicleDocumento7 páginasA Survey On Open-Source Flight Control Platforms of Unmanned Aerial Vehicle029Muhammad Robith Fikris SholihAinda não há avaliações
- En Set 116 (2011) 03Documento18 páginasEn Set 116 (2011) 03Smita PednekarAinda não há avaliações
- Helicopter Flight Control Design Using A Learning Control Approach1Documento6 páginasHelicopter Flight Control Design Using A Learning Control Approach1Abdallah Omar Al AyoubiAinda não há avaliações
- Photogrammetric Accuracy and Modeling of Rolling Shutter CamerasDocumento8 páginasPhotogrammetric Accuracy and Modeling of Rolling Shutter CamerasAlexis PfauAinda não há avaliações
- 0291 Icnsc231Documento6 páginas0291 Icnsc231Karthik Annamalai N RAinda não há avaliações
- Control and Estimation of A Quadcopter Dynamical MDocumento14 páginasControl and Estimation of A Quadcopter Dynamical MmahendranavionicsAinda não há avaliações
- 148 PDFDocumento8 páginas148 PDFAAS SHAinda não há avaliações
- BICOPTERDocumento22 páginasBICOPTERManideep Ananthula100% (4)
- Controle Digital para Aviões Comparação Analógico Excelente Fala Também Sobre Monitoramento Texto TraduzidoDocumento20 páginasControle Digital para Aviões Comparação Analógico Excelente Fala Também Sobre Monitoramento Texto TraduzidoGardenia AndradeAinda não há avaliações
- Paredes 2016Documento6 páginasParedes 2016DIEGO ALEJANDRO CASTILLO RAYMEAinda não há avaliações
- Amrul Faruq ROV 2013Documento13 páginasAmrul Faruq ROV 2013Amrul FaruqAinda não há avaliações
- The Navigation and Control Technology Inside The AR - Drone Micro UAVDocumento8 páginasThe Navigation and Control Technology Inside The AR - Drone Micro UAVRaul RFAinda não há avaliações
- Study of Inertial Measurement Unit SensorDocumento4 páginasStudy of Inertial Measurement Unit SensorĐinh Hữu KiênAinda não há avaliações
- Talwekar Sensor Suite Icra2022Documento7 páginasTalwekar Sensor Suite Icra2022testuserAinda não há avaliações
- Control Architecture For A UAV-Mounted Pan/Tilt/Roll Camera GimbalDocumento10 páginasControl Architecture For A UAV-Mounted Pan/Tilt/Roll Camera GimbalMarcio PortsAinda não há avaliações
- Bicego2020 Article NonlinearModelPredictiveContro PDFDocumento35 páginasBicego2020 Article NonlinearModelPredictiveContro PDFEddylson Aguilar CasquinoAinda não há avaliações
- Design of Kalman Filters For Mobile Robots Evaluation of The Kinematic and Odometric ApproachDocumento6 páginasDesign of Kalman Filters For Mobile Robots Evaluation of The Kinematic and Odometric ApproachShafayat AbrarAinda não há avaliações
- Autonomous Flight Control For An RC HelicopterDocumento4 páginasAutonomous Flight Control For An RC HelicopterWaleed TayyabAinda não há avaliações
- Flight Control Laws Carefree Handling Clearance of A Highly Manoeuvrable Aircraft Using Multi-Strategy Adaptive Global OptimizationDocumento15 páginasFlight Control Laws Carefree Handling Clearance of A Highly Manoeuvrable Aircraft Using Multi-Strategy Adaptive Global OptimizationBlaze123xAinda não há avaliações
- Visual Tracking and Control of A Quadcopter Using PDFDocumento8 páginasVisual Tracking and Control of A Quadcopter Using PDFYovi Herlin SaputraAinda não há avaliações
- GSM Based Arial Photography Using Remote Flying RobotDocumento4 páginasGSM Based Arial Photography Using Remote Flying RobotseventhsensegroupAinda não há avaliações
- Inertial MEMS System Applications: N. Barbour, R. Anderson, J. Connelly, D. Hanson, A. Kourepenis, J. Sitomer, P. WardDocumento12 páginasInertial MEMS System Applications: N. Barbour, R. Anderson, J. Connelly, D. Hanson, A. Kourepenis, J. Sitomer, P. WardDragan LazicAinda não há avaliações
- J Robot 2004 09 017Documento15 páginasJ Robot 2004 09 017AhmedAinda não há avaliações
- Avionics Question and AnswersDocumento4 páginasAvionics Question and AnswersJosin Jose100% (1)
- FSR05 Sky SailorDocumento12 páginasFSR05 Sky SailorAndrei BadulescuAinda não há avaliações
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaNo EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiAinda não há avaliações
- Articulo - Esquema de Deteccion de Fallas para Sistemas de Propulsion de Barcos Usando Tecnicas de Algoritmos AleatoriosDocumento8 páginasArticulo - Esquema de Deteccion de Fallas para Sistemas de Propulsion de Barcos Usando Tecnicas de Algoritmos AleatoriosAnthony MarineAinda não há avaliações
- Simulating Quadrotor UAVs in Outdoor ScenariosDocumento7 páginasSimulating Quadrotor UAVs in Outdoor ScenariosRodolfo Castro E SilvaAinda não há avaliações
- Feedback Linearization and High Order Sliding Mode Observer For A Quadrotor UAVDocumento8 páginasFeedback Linearization and High Order Sliding Mode Observer For A Quadrotor UAVVictor Hugo OrtizAinda não há avaliações
- Real-Time Navigation, Guidance, and Control of A UAV Using Low-Cost SensorsDocumento6 páginasReal-Time Navigation, Guidance, and Control of A UAV Using Low-Cost SensorsJU EE 2021Ainda não há avaliações
- Quadrotor PDFDocumento11 páginasQuadrotor PDFMo'menKhaledAinda não há avaliações
- Build Your Own Visual-Inertial Odometry Aided Cost-Effective and Open-Source Autonomous DroneDocumento21 páginasBuild Your Own Visual-Inertial Odometry Aided Cost-Effective and Open-Source Autonomous DronewordfloAinda não há avaliações
- Design and Simulation of Control Strategies For Trajectory Tracking in An Autonomous Ground VehicleDocumento6 páginasDesign and Simulation of Control Strategies For Trajectory Tracking in An Autonomous Ground VehicleKu BiAinda não há avaliações
- W F P C A UAV: Aypoint Light Arameter Omparison of AN UtonomousDocumento11 páginasW F P C A UAV: Aypoint Light Arameter Omparison of AN UtonomousAdam HansenAinda não há avaliações
- Visual-Inertial SLAM For A Small Helicopter in Large Outdoor EnvironmentsDocumento2 páginasVisual-Inertial SLAM For A Small Helicopter in Large Outdoor EnvironmentsAlexandreSidantAinda não há avaliações
- 06-Smart Structure Applications in Aircraft eDocumento9 páginas06-Smart Structure Applications in Aircraft eViknesh AngaiAinda não há avaliações
- UAV SubsystemsDocumento8 páginasUAV SubsystemsAmaryllis MiraeAinda não há avaliações
- Trajectory Path Control of Multiple Unmanned Aerial VehiclesDocumento4 páginasTrajectory Path Control of Multiple Unmanned Aerial VehiclesdormentryAinda não há avaliações
- Small Unmanned Aircraft: Theory and PracticeNo EverandSmall Unmanned Aircraft: Theory and PracticeNota: 4.5 de 5 estrelas4.5/5 (2)
- Our Solar System: by Harshitha Yadav J.R.KDocumento5 páginasOur Solar System: by Harshitha Yadav J.R.KSri SaiAinda não há avaliações
- PI Datasheet E-821 20150121Documento5 páginasPI Datasheet E-821 20150121Sri SaiAinda não há avaliações
- GenerationsDocumento1 páginaGenerationsSri SaiAinda não há avaliações
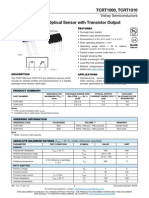
- IR Sensor DatasheetDocumento10 páginasIR Sensor DatasheetSri SaiAinda não há avaliações
- Heli TheoryDocumento105 páginasHeli TheorySri SaiAinda não há avaliações
- Lesson - 2: Ports or Devices Communication and Communication - ProtocolsDocumento41 páginasLesson - 2: Ports or Devices Communication and Communication - ProtocolsSri SaiAinda não há avaliações
- WilliamsDocumento361 páginasWilliamsSri SaiAinda não há avaliações
- MFC TtestDocumento141 páginasMFC TtestSri SaiAinda não há avaliações
- Characterization of Composite Piezoelectric Materials For Smart Joint ApplicationsDocumento90 páginasCharacterization of Composite Piezoelectric Materials For Smart Joint ApplicationsSri SaiAinda não há avaliações
- Nano MFCDocumento10 páginasNano MFCSri SaiAinda não há avaliações
- Macro-Fiber Composite Piezoelectric Rosettes For Acoustic Source Location in Complex StructuresDocumento11 páginasMacro-Fiber Composite Piezoelectric Rosettes For Acoustic Source Location in Complex StructuresSri SaiAinda não há avaliações
- Application of A Fuzzy PI Controller in Regulation of Active Piezoelectric Composite StructureDocumento4 páginasApplication of A Fuzzy PI Controller in Regulation of Active Piezoelectric Composite StructureSri SaiAinda não há avaliações
- ThesisDocumento127 páginasThesisSri SaiAinda não há avaliações
- Controller ExcitationDocumento8 páginasController ExcitationSri SaiAinda não há avaliações
- Using Piezoelectric Materials On The Surface of Air Foils To Generate VoltageDocumento13 páginasUsing Piezoelectric Materials On The Surface of Air Foils To Generate VoltageSri SaiAinda não há avaliações
- Atmel Studio ReadmeDocumento31 páginasAtmel Studio Readmetitu1993Ainda não há avaliações
- Hindi Vyakaran by Anwar ParvezDocumento204 páginasHindi Vyakaran by Anwar Parvezanwar_parvez08Ainda não há avaliações
- 18-MCE-49 Lab Session 01Documento5 páginas18-MCE-49 Lab Session 01Waqar IbrahimAinda não há avaliações
- Day6 7Documento11 páginasDay6 7Abu Al-FarouqAinda não há avaliações
- Iguard® LM SeriesDocumento82 páginasIguard® LM SeriesImran ShahidAinda não há avaliações
- AIIMS 2015 Solved PaperDocumento436 páginasAIIMS 2015 Solved PaperSurya TejaAinda não há avaliações
- Sap Consultant Cover LetterDocumento3 páginasSap Consultant Cover LetterrasgeetsinghAinda não há avaliações
- Industrial ExperienceDocumento30 páginasIndustrial ExperienceThe GridLockAinda não há avaliações
- Saiva Dharma ShastrasDocumento379 páginasSaiva Dharma ShastrasfunnybizAinda não há avaliações
- Grade 7 Nap MayDocumento6 páginasGrade 7 Nap Mayesivaks2000Ainda não há avaliações
- Yale Revision WorksheetDocumento3 páginasYale Revision WorksheetYASHI AGRAWALAinda não há avaliações
- Trina 440W Vertex-S+ DatasheetDocumento2 páginasTrina 440W Vertex-S+ DatasheetBrad MannAinda não há avaliações
- Hele Grade4Documento56 páginasHele Grade4Chard Gonzales100% (3)
- Chapter 13 CarbohydratesDocumento15 páginasChapter 13 CarbohydratesShanna Sophia PelicanoAinda não há avaliações
- Test Bank For Psychology 6th Edition Don HockenburyDocumento18 páginasTest Bank For Psychology 6th Edition Don HockenburyKaitlynMorganarwp100% (42)
- Unit 1 Module 3 Rep in PlantsDocumento26 páginasUnit 1 Module 3 Rep in Plantstamesh jodhanAinda não há avaliações
- Soft Skills & Personality DevelopmentDocumento62 páginasSoft Skills & Personality DevelopmentSajid PashaAinda não há avaliações
- CURRICULUM PharmasubDocumento10 páginasCURRICULUM PharmasubZE Mart DanmarkAinda não há avaliações
- Caring For Women Experiencing Breast Engorgement A Case ReportDocumento6 páginasCaring For Women Experiencing Breast Engorgement A Case ReportHENIAinda não há avaliações
- Financial Market - Bsa 2A Dr. Ben E. Bunyi: Imus Institute of Science and TechnologyDocumento3 páginasFinancial Market - Bsa 2A Dr. Ben E. Bunyi: Imus Institute of Science and TechnologyAsh imoAinda não há avaliações
- Federalist Papers 10 51 ExcerptsDocumento2 páginasFederalist Papers 10 51 Excerptsapi-292351355Ainda não há avaliações
- ..Product CatalogueDocumento56 páginas..Product Catalogue950 911Ainda não há avaliações
- Smartfind E5 g5 User ManualDocumento49 páginasSmartfind E5 g5 User ManualdrewlioAinda não há avaliações
- China Training WCDMA 06-06Documento128 páginasChina Training WCDMA 06-06ryanz2009Ainda não há avaliações
- Ultracold Atoms SlidesDocumento49 páginasUltracold Atoms SlideslaubbaumAinda não há avaliações
- Claim of FactDocumento11 páginasClaim of FactXeb UlritzAinda não há avaliações
- Words of Radiance: Book Two of The Stormlight Archive - Brandon SandersonDocumento6 páginasWords of Radiance: Book Two of The Stormlight Archive - Brandon Sandersonxyrytepa0% (3)
- Chapter 10 Tute Solutions PDFDocumento7 páginasChapter 10 Tute Solutions PDFAi Tien TranAinda não há avaliações
- CISF Manual Final OriginalDocumento17 páginasCISF Manual Final OriginalVaishnavi JayakumarAinda não há avaliações
- SIVACON 8PS - Planning With SIVACON 8PS Planning Manual, 11/2016, A5E01541101-04Documento1 páginaSIVACON 8PS - Planning With SIVACON 8PS Planning Manual, 11/2016, A5E01541101-04marcospmmAinda não há avaliações
- Img 20201010 0005Documento1 páginaImg 20201010 0005Tarek SalehAinda não há avaliações
- The New Order of BarbariansDocumento39 páginasThe New Order of Barbariansbadguy100% (1)