Você também pode gostar
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorAinda não há avaliações
- Design and Analysis of An Adaptive Fuzzy Power System StabilizerDocumento7 páginasDesign and Analysis of An Adaptive Fuzzy Power System StabilizermiguelankeloAinda não há avaliações
- Load Frequency Control of Hydro and Nuclear Power System by PI & GA ControllerDocumento6 páginasLoad Frequency Control of Hydro and Nuclear Power System by PI & GA Controllerijsret100% (1)
- 04 Comparacion Snº1Documento7 páginas04 Comparacion Snº1Americo Kenyu LuqueAinda não há avaliações
- Carga Frecuencia USADocumento8 páginasCarga Frecuencia USAcastrojpAinda não há avaliações
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandDocumento8 páginasElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariAinda não há avaliações
- Iaetsd Fuzzy Logic Control of Statcom For Voltage RegulationDocumento9 páginasIaetsd Fuzzy Logic Control of Statcom For Voltage RegulationiaetsdiaetsdAinda não há avaliações
- Power System Stability Enhancement With Genetically Optimized SVC ControllerDocumento6 páginasPower System Stability Enhancement With Genetically Optimized SVC ControllertinazdrilicAinda não há avaliações
- 1 s2.0 S0019057813000608 Main PDFDocumento6 páginas1 s2.0 S0019057813000608 Main PDFsethukumarkAinda não há avaliações
- Chapter 1Documento46 páginasChapter 1Asish NandaAinda não há avaliações
- Design and Analysis of TID Controller For Load Frequency Control of Two-Area Interconnected Power SystemDocumento5 páginasDesign and Analysis of TID Controller For Load Frequency Control of Two-Area Interconnected Power SystemGuru MishraAinda não há avaliações
- Tuning of Pid Controller Used in Agc Scheme With Genetic AlgorithmsDocumento6 páginasTuning of Pid Controller Used in Agc Scheme With Genetic Algorithmsjjm_8679641Ainda não há avaliações
- Robust Power System Stabilizer Design For An Industrial Power System in Taiwan Using Linear Matrix Inequality TechniquesDocumento6 páginasRobust Power System Stabilizer Design For An Industrial Power System in Taiwan Using Linear Matrix Inequality TechniquesDiego Martinez AranedaAinda não há avaliações
- AA310107Documento7 páginasAA310107Tania JohnsonAinda não há avaliações
- Frequency Stabilization Using Fuzzy Logic Based Controller For Multi-Area Power System in Deregulated EnvironmentDocumento10 páginasFrequency Stabilization Using Fuzzy Logic Based Controller For Multi-Area Power System in Deregulated Environmentyogi_sikarAinda não há avaliações
- Nicola - Marcel - ICATE 2016Documento6 páginasNicola - Marcel - ICATE 2016Marcel NicolaAinda não há avaliações
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDocumento8 páginasUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuAinda não há avaliações
- Double Closed-Loop PI Controller Tuning For MotorDocumento8 páginasDouble Closed-Loop PI Controller Tuning For MotorvrajakisoriDasiAinda não há avaliações
- Icreata21 Paper 37Documento3 páginasIcreata21 Paper 37attouAinda não há avaliações
- Fuzzy Logic For Single AreaDocumento11 páginasFuzzy Logic For Single Areaabata yohannesAinda não há avaliações
- Small Signal Stability of A Large Power System As Affected by New Generation Additions by Prabha KundurDocumento5 páginasSmall Signal Stability of A Large Power System As Affected by New Generation Additions by Prabha KundurAuspiciousAinda não há avaliações
- Calculation of TmsDocumento6 páginasCalculation of TmsMihir PatelAinda não há avaliações
- An Adaptive Protection Algorithm For Distribution Systems With Distributed GenerationDocumento7 páginasAn Adaptive Protection Algorithm For Distribution Systems With Distributed GenerationJamile_P_NAinda não há avaliações
- Improvement of Power System Transient Stability Using An Intelligent Control MethodDocumento9 páginasImprovement of Power System Transient Stability Using An Intelligent Control MethodKhubaib AhmedAinda não há avaliações
- An Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageDocumento10 páginasAn Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageChristian EmenikeAinda não há avaliações
- 10 35378-Gujs 899799-1649221Documento20 páginas10 35378-Gujs 899799-1649221TabishAinda não há avaliações
- Voltage Control in Power System Using Expert System Based On SCADA SystemDocumento5 páginasVoltage Control in Power System Using Expert System Based On SCADA SystemFABIANCHO2210100% (1)
- 1.optimal Placement of Multiple-Type FACTS Devices To Maximize Power System Loadability Using A Generic Graphical User InterfaceDocumento3 páginas1.optimal Placement of Multiple-Type FACTS Devices To Maximize Power System Loadability Using A Generic Graphical User InterfaceksbnAinda não há avaliações
- Fuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012Documento5 páginasFuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012bhargavkoriya837Ainda não há avaliações
- Electrical Power and Energy Systems: SciencedirectDocumento12 páginasElectrical Power and Energy Systems: SciencedirectRNAinda não há avaliações
- 0 PepeDocumento7 páginas0 PepeVaisakh_k5683Ainda não há avaliações
- Problem StatementDocumento9 páginasProblem StatementTauseef Gillani100% (1)
- Antenna Azimuth Position Control System Using PIDDocumento12 páginasAntenna Azimuth Position Control System Using PIDAyumuAinda não há avaliações
- Ejaet 2 11 43 48Documento6 páginasEjaet 2 11 43 48Mekonnen ShewaregaAinda não há avaliações
- Modeling Wind Farms For Power System LoadDocumento8 páginasModeling Wind Farms For Power System LoadArmando MaloneAinda não há avaliações
- Design of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemDocumento9 páginasDesign of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemAmberMeerabAinda não há avaliações
- Analysis of Model-Based Tuning Method of PIDDocumento21 páginasAnalysis of Model-Based Tuning Method of PIDAlejandroGutierrezAinda não há avaliações
- Power Systems PROJECTS WITH ABSTRACTDocumento5 páginasPower Systems PROJECTS WITH ABSTRACTElangovan SekarAinda não há avaliações
- Electric Power Systems Research: P. Pinceti, M. Vanti, C. Brocca, M. Carnesecchi, G.P. MaceraDocumento12 páginasElectric Power Systems Research: P. Pinceti, M. Vanti, C. Brocca, M. Carnesecchi, G.P. MaceraJitender KaushalAinda não há avaliações
- Investigation of Insulation Performance of High Voltage Rotating Machines Using Intelligent TechniquesDocumento5 páginasInvestigation of Insulation Performance of High Voltage Rotating Machines Using Intelligent TechniquesDante FilhoAinda não há avaliações
- Journalofelectricalengineering&Technologyvol.5, No.4, Pp.552 560,2010 ÎDocumento14 páginasJournalofelectricalengineering&Technologyvol.5, No.4, Pp.552 560,2010 ÎgeethachowAinda não há avaliações
- Analysis On Various Optimization Techniques Used For Load Frequency Control in Power SystemDocumento25 páginasAnalysis On Various Optimization Techniques Used For Load Frequency Control in Power SystemsuderAinda não há avaliações
- Archive of SID: Dynamic Controllers Design For STATCOMDocumento7 páginasArchive of SID: Dynamic Controllers Design For STATCOMRajaavikhram YohanandhanAinda não há avaliações
- Development of A MATLABSimulink Model of A Single-Phase Grid-Connected Photovoltaic System-IwQDocumento8 páginasDevelopment of A MATLABSimulink Model of A Single-Phase Grid-Connected Photovoltaic System-IwQSaddam HussainAinda não há avaliações
- Fuzzy-PI Current Controlled D-STATCOMDocumento11 páginasFuzzy-PI Current Controlled D-STATCOMByreddy C S ReddyAinda não há avaliações
- CIRED2009 0518 PaperDocumento4 páginasCIRED2009 0518 PapersrivaishnaviAinda não há avaliações
- A New Optimal AVR Parameter Tuning MethodDocumento6 páginasA New Optimal AVR Parameter Tuning Methodcicm1993Ainda não há avaliações
- Shen 2014 ModelingDocumento7 páginasShen 2014 ModelingPaponson Indrachai-eaAinda não há avaliações
- 04510005-Behan Ka LundDocumento6 páginas04510005-Behan Ka LundmontykhannaAinda não há avaliações
- Energies: Voltage-Sensorless Control Scheme For A Grid Connected Inverter Using Disturbance ObserverDocumento19 páginasEnergies: Voltage-Sensorless Control Scheme For A Grid Connected Inverter Using Disturbance ObserverEngr ImmiAinda não há avaliações
- Research PaperDocumento10 páginasResearch PaperAlok AgarwalAinda não há avaliações
- Kerrouche2020 Article ModelingAndDesignOfTheImprovedDocumento11 páginasKerrouche2020 Article ModelingAndDesignOfTheImprovedBounty CowboyAinda não há avaliações
- 535 11910 1 PB PDFDocumento12 páginas535 11910 1 PB PDFAnonymous fHEEc2lx6Ainda não há avaliações
- Implementation of A DSP-Controlled Photovoltaic System With Peak Power TrackingDocumento9 páginasImplementation of A DSP-Controlled Photovoltaic System With Peak Power Trackingjs_junior07Ainda não há avaliações
- Current Status of Fuzzy System Applications in Power SystemsDocumento6 páginasCurrent Status of Fuzzy System Applications in Power SystemsAndres ZuñigaAinda não há avaliações
- Design and Implementation of Model Predictive Control For Electrical Motor DrivesDocumento12 páginasDesign and Implementation of Model Predictive Control For Electrical Motor Drivestariq76Ainda não há avaliações
- Optimization and Intelligent Techniques For Electrical VehicleDocumento15 páginasOptimization and Intelligent Techniques For Electrical VehicleViswanathanBalajiAinda não há avaliações
- Automatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesDocumento11 páginasAutomatic Tuning Method For The Design of Supplementary Damping Controllers For Exible Alternating Current Transmission System DevicesFernando RamosAinda não há avaliações
- A Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power CompensationDocumento6 páginasA Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power Compensationsandeepbabu28Ainda não há avaliações
- TCPSTDocumento9 páginasTCPSTmartinezjose192Ainda não há avaliações
- PLC Fundamental TheoryDocumento97 páginasPLC Fundamental Theorykodandaram100% (2)
- Contactor BasicsDocumento22 páginasContactor Basicskodandaram100% (4)
- MRP LVSGR 15 Dec 08Documento56 páginasMRP LVSGR 15 Dec 08kodandaramAinda não há avaliações
- Motor StandardsDocumento17 páginasMotor Standardskodandaram100% (4)
- Motor StandardsDocumento17 páginasMotor Standardskodandaram100% (4)
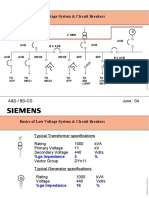
- Basics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04Documento17 páginasBasics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04kodandaram100% (1)
- Handbook of AC Servo SystemsDocumento42 páginasHandbook of AC Servo Systemskodandaram100% (1)
- Siemens - Motor SpecificationsDocumento50 páginasSiemens - Motor SpecificationsArtifoxAinda não há avaliações
- Microprocessor Based Overload Relay 3RB12Documento11 páginasMicroprocessor Based Overload Relay 3RB12kodandaramAinda não há avaliações
- Ac DriveDocumento32 páginasAc DrivedenramrAinda não há avaliações
- Magnetic Fluid and Nanoparticle Applications To NanotechnologyDocumento6 páginasMagnetic Fluid and Nanoparticle Applications To NanotechnologykodandaramAinda não há avaliações
- Analysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementsDocumento7 páginasAnalysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementskodandaramAinda não há avaliações
- Siemens AC Motors BOOKDocumento39 páginasSiemens AC Motors BOOKPedada AdityaAinda não há avaliações
- Acd 1Documento36 páginasAcd 1lvb123Ainda não há avaliações
- Gordon Woodward: City of Coventry Single and Two Phase Generation and DistributionDocumento4 páginasGordon Woodward: City of Coventry Single and Two Phase Generation and DistributionkodandaramAinda não há avaliações
- Ge - 06Documento1 páginaGe - 06kodandaramAinda não há avaliações
- Load-Frequency Regulation Under0-06Documento9 páginasLoad-Frequency Regulation Under0-06kodandaram100% (1)
- Decentralized Load-Frequency Control of A Two-Area Power System Via Linear Programming and Optimization TechniquesDocumento6 páginasDecentralized Load-Frequency Control of A Two-Area Power System Via Linear Programming and Optimization TechniqueskodandaramAinda não há avaliações
- The Prospects of Nanotechnology in Electrical Power Engineering PDFDocumento4 páginasThe Prospects of Nanotechnology in Electrical Power Engineering PDFMohamed Abdel Aziz DarwishAinda não há avaliações
- Resume (Core)Documento3 páginasResume (Core)kodandaramAinda não há avaliações
- Application of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemDocumento4 páginasApplication of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemkodandaramAinda não há avaliações
- Search HL En&lr &RLZ 1G1GGLQ ENIN314&q What+is+the+Requirement+of+ANN+in+Load+Frequecy+Control+at+Generation&Start 20&sa NDocumento16 páginasSearch HL En&lr &RLZ 1G1GGLQ ENIN314&q What+is+the+Requirement+of+ANN+in+Load+Frequecy+Control+at+Generation&Start 20&sa NkodandaramAinda não há avaliações
- Mobile Ad Hoc Network Simulation Using NS2: ANUSHA REDDY (T150228560)Documento30 páginasMobile Ad Hoc Network Simulation Using NS2: ANUSHA REDDY (T150228560)Anusha ReddyAinda não há avaliações
- The Basics of Data AnalyticsDocumento17 páginasThe Basics of Data AnalyticsAkmal Yezdani100% (1)
- Chapter - 2 Marketing Research Problem and Developing ApproachDocumento32 páginasChapter - 2 Marketing Research Problem and Developing ApproachAyushman UpretiAinda não há avaliações
- Calculus Mathematics For BusinessDocumento112 páginasCalculus Mathematics For BusinessR. Mega MahmudiaAinda não há avaliações
- Modeling and SimulationDocumento29 páginasModeling and SimulationMuhammad Hammad Javed IqbalAinda não há avaliações
- Plant Design 2Documento42 páginasPlant Design 2Jaymee Delfinado100% (2)
- The Use of Mathematical Models For Logistics Systems AnalysisDocumento10 páginasThe Use of Mathematical Models For Logistics Systems AnalysisHo Van RoiAinda não há avaliações
- Why Math To Biomedical EngineeringDocumento10 páginasWhy Math To Biomedical EngineeringIndumeenal RAinda não há avaliações
- Part 1 - Introduction To Numerical MethodsDocumento70 páginasPart 1 - Introduction To Numerical Methodsepic19999Ainda não há avaliações
- Introduction To Optimization: Historical DevelopmentDocumento5 páginasIntroduction To Optimization: Historical DevelopmentSaheera HazarikaAinda não há avaliações
- Learning The Software-MATLABDocumento3 páginasLearning The Software-MATLABKratagya SinghalAinda não há avaliações
- Co 3 MaterialDocumento16 páginasCo 3 MaterialAngel Ammu100% (1)
- A Guide For Writing Mathematics PortfolioDocumento20 páginasA Guide For Writing Mathematics PortfolioDario Panada100% (1)
- Modeling and Simulating Dynamical SystemsDocumento25 páginasModeling and Simulating Dynamical SystemsMarques Patricio MambaAinda não há avaliações
- A Survey On Control Techniques To Stabilize and Control The Non Linear SystemDocumento4 páginasA Survey On Control Techniques To Stabilize and Control The Non Linear SystemshubaAinda não há avaliações
- Pyfmi TechDocumento45 páginasPyfmi TechCarlos JimenezAinda não há avaliações
- Introduction To SimulationDocumento43 páginasIntroduction To SimulationRenglones En Blanco100% (1)
- Edited by Chiang Jao - Efficient Decision Support PDFDocumento556 páginasEdited by Chiang Jao - Efficient Decision Support PDFbachrum firdausAinda não há avaliações
- Derivation 01Documento2 páginasDerivation 01mbmonvilleAinda não há avaliações
- Process Systems EngineeringDocumento18 páginasProcess Systems EngineeringSandra GilbertAinda não há avaliações
- Chapter 15 PDFDocumento44 páginasChapter 15 PDFWilber LucasAinda não há avaliações
- Q2 - MODULE 1&2 - MATH 101 - Students'Documento129 páginasQ2 - MODULE 1&2 - MATH 101 - Students'Faith CenaAinda não há avaliações
- Application of Assignment Model in PE Human Resources AllocationDocumento4 páginasApplication of Assignment Model in PE Human Resources AllocationArjun Jinumon PootharaAinda não há avaliações
- The Importance of Intelligent Control SystemsDocumento3 páginasThe Importance of Intelligent Control Systemsresearchparks100% (1)
- A Comparative Study of The Different Costing Techniques and Their ApplicationDocumento11 páginasA Comparative Study of The Different Costing Techniques and Their ApplicationSofiya BayraktarovaAinda não há avaliações
- 7 - Developing Models For OptimizationDocumento18 páginas7 - Developing Models For OptimizationniralAinda não há avaliações
- System Dynamics Modeling and SimulationDocumento287 páginasSystem Dynamics Modeling and Simulationswjaffry86% (7)
- Suez Canal SolutionDocumento7 páginasSuez Canal Solutionapi-257891091Ainda não há avaliações
- Activity: "Sub Me In": DirectionDocumento22 páginasActivity: "Sub Me In": DirectionOdinah Mariano Bantolo100% (1)
- Road Note 29 Design of Bituminous Pavements PDFDocumento69 páginasRoad Note 29 Design of Bituminous Pavements PDFKshitiz JoshiAinda não há avaliações