Você também pode gostar
- DC Machines NotesDocumento97 páginasDC Machines NotesgkmkkAinda não há avaliações
- Chapter 2 DC MachinesDocumento97 páginasChapter 2 DC Machinesb14.00010.20Ainda não há avaliações
- A New System of Alternating Current Motors and Transformers and Other EssaysNo EverandA New System of Alternating Current Motors and Transformers and Other EssaysNota: 5 de 5 estrelas5/5 (1)
- EEE Chapter 2 PDFDocumento37 páginasEEE Chapter 2 PDFKrishna ChaitanyaAinda não há avaliações
- A New System of Alternating Current Motors and TransformersNo EverandA New System of Alternating Current Motors and TransformersNota: 1 de 5 estrelas1/5 (1)
- DC Motors PDFDocumento30 páginasDC Motors PDFMADHUSUDHAN BOYAAinda não há avaliações
- Unit 3Documento42 páginasUnit 3Anbazhagan SelvanathanAinda não há avaliações
- Principles and Practices of Molecular Properties: Theory, Modeling, and SimulationsNo EverandPrinciples and Practices of Molecular Properties: Theory, Modeling, and SimulationsAinda não há avaliações
- 2 Eee Em-1Documento117 páginas2 Eee Em-1PramodAinda não há avaliações
- Modern Electrical Installation for Craft StudentsNo EverandModern Electrical Installation for Craft StudentsNota: 4.5 de 5 estrelas4.5/5 (4)
- DC Generators NotesDocumento9 páginasDC Generators NotesDongara RameshAinda não há avaliações
- ELECTRICAL MACHINES OVERVIEWDocumento74 páginasELECTRICAL MACHINES OVERVIEWArjun PratabAinda não há avaliações
- DC Generator2021Documento28 páginasDC Generator2021Maysara BalakiAinda não há avaliações
- Development of Electromotive ForceDocumento5 páginasDevelopment of Electromotive ForcesmhbAinda não há avaliações
- DC Generators TechniquesDocumento74 páginasDC Generators TechniquesAbdulrazzaqAinda não há avaliações
- Necessity and Utilization of Direct CurrentDocumento6 páginasNecessity and Utilization of Direct CurrentXahid HasanAinda não há avaliações
- Electrical Machines DC Motor NewDocumento27 páginasElectrical Machines DC Motor NewPranav MahadikAinda não há avaliações
- DC MachinesDocumento23 páginasDC MachinesNoyaAinda não há avaliações
- DC Machines: The Action of A CommuttatorDocumento5 páginasDC Machines: The Action of A CommuttatorKirk PatrickAinda não há avaliações
- D.C. Generators: ChapterDocumento34 páginasD.C. Generators: ChapterHuỳnh Thanh ThiệnAinda não há avaliações
- Topic 8 DC Machines IDocumento18 páginasTopic 8 DC Machines IThairu MuiruriAinda não há avaliações
- Electromechanical Energy ConversionDocumento283 páginasElectromechanical Energy ConversionjcmeeAinda não há avaliações
- POWER SUPPLY SYSTEM. ServicesDocumento76 páginasPOWER SUPPLY SYSTEM. ServicesnwanabossAinda não há avaliações
- DC Generator and MotorDocumento7 páginasDC Generator and MotoranilkulalAinda não há avaliações
- DC GenDocumento74 páginasDC GenAhmed58seribegawan100% (1)
- 2024 EcDocumento22 páginas2024 Echathanhchinh_bsAinda não há avaliações
- Microsoft Word - Notes On DC GeneratorDocumento40 páginasMicrosoft Word - Notes On DC GeneratorDr. Deepika YadavAinda não há avaliações
- Chapter 2Documento16 páginasChapter 2Selemon AssefaAinda não há avaliações
- DC Machine L03Documento29 páginasDC Machine L03luckyAinda não há avaliações
- 3.chapter Three-Starting System 1Documento21 páginas3.chapter Three-Starting System 1Ahmed M MerzaAinda não há avaliações
- Backup of Lecture 3 and 4.wbkDocumento12 páginasBackup of Lecture 3 and 4.wbkJames musambakiAinda não há avaliações
- Lecture Note 1Documento19 páginasLecture Note 1Oladimeji OloruntobiAinda não há avaliações
- Unit-I DC GeneratorsDocumento45 páginasUnit-I DC GeneratorsParameshwar TummetiAinda não há avaliações
- 21 EE44 - Module 1Documento28 páginas21 EE44 - Module 1AshwiniAinda não há avaliações
- EEE 233 DC Generator: 2kVA Universal MachineDocumento38 páginasEEE 233 DC Generator: 2kVA Universal MachineSHAJEDA AKTHER 2102154Ainda não há avaliações
- Generator 200719111416Documento43 páginasGenerator 200719111416Jerome JeremiasAinda não há avaliações
- Microsoft Word - CHAPTER 5 240311 105505Documento19 páginasMicrosoft Word - CHAPTER 5 240311 105505thivaa2703Ainda não há avaliações
- Energy Conversion IDocumento129 páginasEnergy Conversion IKhalil BahrEldinAinda não há avaliações
- Chapter 1 - DC Generator Parts and Working PrinciplesDocumento18 páginasChapter 1 - DC Generator Parts and Working PrinciplesJay Johnel ManaloAinda não há avaliações
- Vignan'S Institute of Information Technology (A) Department of EeeDocumento11 páginasVignan'S Institute of Information Technology (A) Department of EeeDinesh PalavalasaAinda não há avaliações
- EE352 Chapter #3 Electromechanical Energy ConversionDocumento12 páginasEE352 Chapter #3 Electromechanical Energy ConversionCan ARABACIAinda não há avaliações
- ECE 320 Chapter 4: DC MotorsDocumento7 páginasECE 320 Chapter 4: DC MotorsHüseyin Murat PolaterAinda não há avaliações
- ProjectDocumento25 páginasProjectAsif MuhammadAinda não há avaliações
- UNIT-2 Basic Electrical EngineeringDocumento26 páginasUNIT-2 Basic Electrical Engineeringabhi shekAinda não há avaliações
- Electrical Circuits Theory 1 Lecture: AC Generator PrincipleDocumento20 páginasElectrical Circuits Theory 1 Lecture: AC Generator PrincipleAliAinda não há avaliações
- 2,3. DC Generators & MotorsDocumento84 páginas2,3. DC Generators & MotorsnakkasrinuAinda não há avaliações
- DC MachineDocumento33 páginasDC MachineJevon WilsonAinda não há avaliações
- Generators and MotorsDocumento9 páginasGenerators and Motorseng.muhammad.waterAinda não há avaliações
- Introduction of Ac GeneratorDocumento10 páginasIntroduction of Ac Generatorprince395100% (1)
- EASA Mod 3 BK 4 Ac & DC Mech PDFDocumento76 páginasEASA Mod 3 BK 4 Ac & DC Mech PDFNavaraj BaniyaAinda não há avaliações
- 9a AC Induction Motors Rev 3 100114 CCuploadDocumento16 páginas9a AC Induction Motors Rev 3 100114 CCuploaddautroc13Ainda não há avaliações
- DC Motors ExplainedDocumento12 páginasDC Motors Explaineddynamic_sAinda não há avaliações
- Unit-2 DC Drives: DC Motors and Their PerformanceDocumento19 páginasUnit-2 DC Drives: DC Motors and Their PerformanceTimoAinda não há avaliações
- Experiment No 5 SWPDocumento4 páginasExperiment No 5 SWPAnuj DholeAinda não há avaliações
- Concept of Electricity EnerationDocumento7 páginasConcept of Electricity EnerationAbhishekAinda não há avaliações
- Chapter Three Induced Electromotive Force Induced Electromotive Force 3.1. Faraday's Law of InductionDocumento7 páginasChapter Three Induced Electromotive Force Induced Electromotive Force 3.1. Faraday's Law of Inductionبلسم محمود شاكرAinda não há avaliações
- ConverDocumento11 páginasConverAnonymous tJgIbVzpAinda não há avaliações
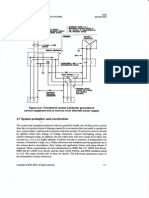
- Figure 3-2-Transferred Neutral Conduetor Grounded at Service Equipment and at Sources of An Alternate Power SupplyDocumento4 páginasFigure 3-2-Transferred Neutral Conduetor Grounded at Service Equipment and at Sources of An Alternate Power SupplyCarlos VásquezAinda não há avaliações
- Lagrange Method of InterpolationDocumento16 páginasLagrange Method of InterpolationCarlos VásquezAinda não há avaliações
- Design AmpacityDocumento2 páginasDesign AmpacityCarlos VásquezAinda não há avaliações
- Single Phase MotorDocumento4 páginasSingle Phase MotorCarlos VásquezAinda não há avaliações
- Guideline For Static Winding Circuit Analysis of Rotating Machinery and TransformersDocumento14 páginasGuideline For Static Winding Circuit Analysis of Rotating Machinery and TransformersCarlos VásquezAinda não há avaliações
- Aluminum Vs CopperDocumento7 páginasAluminum Vs Copperc.a.g.p.Ainda não há avaliações
- Direct Current Motor Electrical Evaluation With Motor Circuit AnalysisDocumento6 páginasDirect Current Motor Electrical Evaluation With Motor Circuit AnalysisCarlos VásquezAinda não há avaliações
- Plug in BrochureDocumento2 páginasPlug in BrochureCarlos VásquezAinda não há avaliações
- REME TechnologyDocumento4 páginasREME TechnologyCarlos VásquezAinda não há avaliações
- Value of Wind EnergyDocumento10 páginasValue of Wind EnergyCarlos VásquezAinda não há avaliações
- Mold/Bacteria Protection of An Air Conditioner Coil: The ProblemDocumento4 páginasMold/Bacteria Protection of An Air Conditioner Coil: The ProblemmubeenmerajAinda não há avaliações
- Guardian Air BrochureDocumento2 páginasGuardian Air BrochureCarlos VásquezAinda não há avaliações
- Plug in BrochureDocumento2 páginasPlug in BrochureCarlos VásquezAinda não há avaliações
- Fluke AutomotiveDocumento14 páginasFluke AutomotiveSpectrumRaijinAinda não há avaliações
- Brushless Excitation SystemDocumento27 páginasBrushless Excitation SystemSam100% (2)
- ANDAMAN Notification JeDocumento11 páginasANDAMAN Notification JeRAHUL ANANDAinda não há avaliações
- Stamford Newage Alternator UCI274GDocumento9 páginasStamford Newage Alternator UCI274Gedgar ricoAinda não há avaliações
- Power: Manufacturers of AC Generators Upto 250MVADocumento11 páginasPower: Manufacturers of AC Generators Upto 250MVAsanjeetkarAinda não há avaliações
- Sip 1Documento12 páginasSip 1Jonas Marco CagueteAinda não há avaliações
- Magnetic Effect of CurrentDocumento12 páginasMagnetic Effect of CurrentTapas Banerjee100% (1)
- 8open End Winding PMSG For Wind Energy Conversion System - 1 PDFDocumento1 página8open End Winding PMSG For Wind Energy Conversion System - 1 PDFtariq76Ainda não há avaliações
- Engineering Vol 72 1901-08-02Documento35 páginasEngineering Vol 72 1901-08-02ian_newAinda não há avaliações
- 25 Kva Diesel GeneratorDocumento2 páginas25 Kva Diesel Generatormsi36Ainda não há avaliações
- J-C250DS-50HZ 250KVA Cummins Technical DataDocumento7 páginasJ-C250DS-50HZ 250KVA Cummins Technical DataAndhy AksaAinda não há avaliações
- Design of Hydroelectric Power PlantsDocumento54 páginasDesign of Hydroelectric Power Plantsbagus adi saputraAinda não há avaliações
- BP Lesson 3.1 FundamentalsDocumento38 páginasBP Lesson 3.1 Fundamentalsglen jlieza fuentecillaAinda não há avaliações
- WECC recommended generic models for solar PV plantsDocumento7 páginasWECC recommended generic models for solar PV plantsAnindya Bikash DeAinda não há avaliações
- Linear Electric Machines - A Personal ViewDocumento66 páginasLinear Electric Machines - A Personal ViewLin ChengAinda não há avaliações
- Topic 12 ReviewDocumento15 páginasTopic 12 Reviewchanman209Ainda não há avaliações
- Tugas Sted - Ilham Muhammad Azhar - 031800022Documento8 páginasTugas Sted - Ilham Muhammad Azhar - 031800022Ammar Yasir IzzatullahAinda não há avaliações
- (IMechE Conference) M. J. Moore-Micro-turbine Generators-Wiley (2002)Documento126 páginas(IMechE Conference) M. J. Moore-Micro-turbine Generators-Wiley (2002)SaadEddine AtifAinda não há avaliações
- CX501KB Gas Turbine Startup Sequence TrainingDocumento13 páginasCX501KB Gas Turbine Startup Sequence TrainingGUESSOUMAAinda não há avaliações
- Industrial Rb211Documento12 páginasIndustrial Rb211rrcardoso230Ainda não há avaliações
- Woodward Governor Troubleshooting Case StudyDocumento0 páginaWoodward Governor Troubleshooting Case StudySofiane HalimiAinda não há avaliações
- Gate Drive Design For Paralleled SiC MOSFETs in High Power Voltage Source ConvertersDocumento104 páginasGate Drive Design For Paralleled SiC MOSFETs in High Power Voltage Source Convertersahmed bakareAinda não há avaliações
- Modelo APD300C-6Documento4 páginasModelo APD300C-6WilmerAinda não há avaliações
- Cxdi 701g - 701c Service ManualDocumento244 páginasCxdi 701g - 701c Service Manualsamuel debebeAinda não há avaliações
- (2013 - ) WX-98FT User ManualDocumento36 páginas(2013 - ) WX-98FT User ManualOscar Omar Quintanilla100% (1)
- GP400-100 Aircraft Ground Power UnitDocumento2 páginasGP400-100 Aircraft Ground Power Unitdedoneza100% (1)
- Tinkering PPT Wind GeneratorDocumento10 páginasTinkering PPT Wind Generatormr copy xeroxAinda não há avaliações
- DATA SHEET Generator Sagardighi 01 (HW-DC-373-4044-512rev01)Documento24 páginasDATA SHEET Generator Sagardighi 01 (HW-DC-373-4044-512rev01)Parthasarathi PaulAinda não há avaliações
- Discussion of Efficient Method To Compute Transfer Function of A Transformer From Eq. Circuit 210885Documento2 páginasDiscussion of Efficient Method To Compute Transfer Function of A Transformer From Eq. Circuit 210885cristian1961Ainda não há avaliações
- KGE12E Gasoline Generator ManualDocumento9 páginasKGE12E Gasoline Generator Manualmuftah76Ainda não há avaliações
- Diy Magnetic MotorDocumento46 páginasDiy Magnetic Motorzeke11100% (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesNo EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesNota: 4.5 de 5 estrelas4.5/5 (21)
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionNota: 5 de 5 estrelas5/5 (1)
- Build Your Own Electric Vehicle, Third EditionNo EverandBuild Your Own Electric Vehicle, Third EditionNota: 4.5 de 5 estrelas4.5/5 (3)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureNo EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureNota: 3.5 de 5 estrelas3.5/5 (48)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentNo EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentNota: 4.5 de 5 estrelas4.5/5 (21)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsAinda não há avaliações
- Asset Integrity Management for Offshore and Onshore StructuresNo EverandAsset Integrity Management for Offshore and Onshore StructuresAinda não há avaliações
- Nuclear Energy in the 21st Century: World Nuclear University PressNo EverandNuclear Energy in the 21st Century: World Nuclear University PressNota: 4.5 de 5 estrelas4.5/5 (3)
- Shorting the Grid: The Hidden Fragility of Our Electric GridNo EverandShorting the Grid: The Hidden Fragility of Our Electric GridNota: 4.5 de 5 estrelas4.5/5 (2)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyAinda não há avaliações
- The Rare Metals War: the dark side of clean energy and digital technologiesNo EverandThe Rare Metals War: the dark side of clean energy and digital technologiesNota: 5 de 5 estrelas5/5 (2)
- Industrial Piping and Equipment Estimating ManualNo EverandIndustrial Piping and Equipment Estimating ManualNota: 5 de 5 estrelas5/5 (7)
- Implementing an Integrated Management System (IMS): The strategic approachNo EverandImplementing an Integrated Management System (IMS): The strategic approachNota: 5 de 5 estrelas5/5 (2)
- Handbook on Battery Energy Storage SystemNo EverandHandbook on Battery Energy Storage SystemNota: 4.5 de 5 estrelas4.5/5 (2)
- ISO 50001: A strategic guide to establishing an energy management systemNo EverandISO 50001: A strategic guide to establishing an energy management systemAinda não há avaliações
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsAinda não há avaliações
- Natural Gas Processing: Technology and Engineering DesignNo EverandNatural Gas Processing: Technology and Engineering DesignNota: 5 de 5 estrelas5/5 (8)
- Operational Amplifier Circuits: Analysis and DesignNo EverandOperational Amplifier Circuits: Analysis and DesignNota: 4.5 de 5 estrelas4.5/5 (2)
- Well Control for Completions and InterventionsNo EverandWell Control for Completions and InterventionsNota: 4 de 5 estrelas4/5 (10)
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&ANo EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&ANota: 5 de 5 estrelas5/5 (1)
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNo EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksAinda não há avaliações