Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Security Council: Membership, Structures, FunctionsDocumento17 páginasThe Security Council: Membership, Structures, FunctionsTochi Krishna AbhishekAinda não há avaliações
- Brexit: Regaining Sovereignty?: - An Political Science ProjectDocumento19 páginasBrexit: Regaining Sovereignty?: - An Political Science ProjectTochi Krishna AbhishekAinda não há avaliações
- This Critique and Literary Analysis of The Drama "Silence! The Court Is in Session" by Vijay Tendulkar Focuses OnDocumento6 páginasThis Critique and Literary Analysis of The Drama "Silence! The Court Is in Session" by Vijay Tendulkar Focuses OnTochi Krishna AbhishekAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- StepsDocumento2 páginasStepsFajri IsnantoAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Mis Tutorial 3 (NOT MY PROPERTY)Documento77 páginasMis Tutorial 3 (NOT MY PROPERTY)Pat ZednetneAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Product Labelling RequirementsDocumento13 páginasProduct Labelling RequirementsTochi Krishna AbhishekAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Exhibitor ListDocumento15 páginasExhibitor ListTochi Krishna AbhishekAinda não há avaliações
- Facebook Ad Checklist by DeepakDocumento1 páginaFacebook Ad Checklist by DeepakTochi Krishna AbhishekAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Ultimate Digital Marketing Checklist PDFDocumento6 páginasThe Ultimate Digital Marketing Checklist PDFAdnanAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Booklet - Children in India and Their RightsDocumento77 páginasBooklet - Children in India and Their RightsTochi Krishna AbhishekAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Constitutional Provisions .FullDocumento8 páginasConstitutional Provisions .FullTJPRC PublicationsAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Performance Analysis of CCGT Power Plant Using MATLAB Simulink Based SimulationDocumento6 páginasPerformance Analysis of CCGT Power Plant Using MATLAB Simulink Based SimulationTochi Krishna Abhishek100% (1)
- The Ultimate Digital Marketing Checklist PDFDocumento6 páginasThe Ultimate Digital Marketing Checklist PDFAdnanAinda não há avaliações
- Abandoned Cart Emails: A Data-Driven Guide To Recovering Lost SalesDocumento37 páginasAbandoned Cart Emails: A Data-Driven Guide To Recovering Lost SalesTochi Krishna AbhishekAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Ministry of Food Processing Industries09Documento2 páginasMinistry of Food Processing Industries09Tochi Krishna AbhishekAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- 10 Chapter 6Documento41 páginas10 Chapter 6Tochi Krishna AbhishekAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- All About Deep Cycle BatteriesDocumento15 páginasAll About Deep Cycle BatteriesTochi Krishna AbhishekAinda não há avaliações
- HTTPDocumento1 páginaHTTPTochi Krishna AbhishekAinda não há avaliações
- Interview TipsDocumento23 páginasInterview TipsTochi Krishna AbhishekAinda não há avaliações
- Cozi Car PresentationDocumento24 páginasCozi Car PresentationTochi Krishna Abhishek100% (1)
- Analysis of Cold Chain in IndiaDocumento5 páginasAnalysis of Cold Chain in IndiaTochi Krishna AbhishekAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- List of Consuer Groups TRAI 16july13Documento3 páginasList of Consuer Groups TRAI 16july13Tochi Krishna AbhishekAinda não há avaliações
- Slug Flow Two Phase FlowDocumento15 páginasSlug Flow Two Phase FlowTochi Krishna Abhishek100% (1)
- K - 301Documento4 páginasK - 301Tochi Krishna AbhishekAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Detailedad GATE2015Documento8 páginasDetailedad GATE2015Ramanareddy AnathapurAinda não há avaliações
- Ruby TutorialDocumento11 páginasRuby TutorialTochi Krishna AbhishekAinda não há avaliações
- LAB #2 Flow Regime Map For Air-Water Two-Phase Flow in A Horizontal PipeDocumento4 páginasLAB #2 Flow Regime Map For Air-Water Two-Phase Flow in A Horizontal PipeTochi Krishna AbhishekAinda não há avaliações
- Major Project TitleDocumento1 páginaMajor Project TitleTochi Krishna AbhishekAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Ruby TutorialDocumento42 páginasRuby TutorialRadu PavelcoAinda não há avaliações
- 3rdrail Data SheetDocumento2 páginas3rdrail Data SheetNarendra KumarAinda não há avaliações
- Manual Taller Blazer InglesDocumento1.005 páginasManual Taller Blazer InglesJohn Morales100% (1)
- Liebherr HS 873 HDDocumento8 páginasLiebherr HS 873 HDLukmanAinda não há avaliações
- Reliable Institute DPP of Maths Circles and ST LineDocumento15 páginasReliable Institute DPP of Maths Circles and ST LinePrakhar BansalAinda não há avaliações
- Mitsubishi Pajero Montero Sport 98Documento858 páginasMitsubishi Pajero Montero Sport 98corollafx16100% (17)
- Raw Pareto Week 51Documento349 páginasRaw Pareto Week 51Ahmat RamadaniAinda não há avaliações
- Chilled Water System OptimizationDocumento36 páginasChilled Water System OptimizationPramod EkAinda não há avaliações
- Honeywell Electro-Hydraulic Servo Valves EHSVDocumento2 páginasHoneywell Electro-Hydraulic Servo Valves EHSVAhua HuangAinda não há avaliações
- Sinamics Perfect Harmony enDocumento16 páginasSinamics Perfect Harmony ensykimk8921Ainda não há avaliações
- I-Beam Girder ComputionsDocumento10 páginasI-Beam Girder ComputionsMark Christopher Del RosarioAinda não há avaliações
- TMA2 12 09 2021 UploadDocumento3 páginasTMA2 12 09 2021 UploadG.G. PRABHATH CHINTHAKAAinda não há avaliações
- ATV 250 ManualDocumento223 páginasATV 250 ManualDavid PootAinda não há avaliações
- Component Codes Component TitlesDocumento6 páginasComponent Codes Component TitlesJennifer BellAinda não há avaliações
- Manual de Peças Manipulador Telescopico 1200SJP 1350SJPDocumento460 páginasManual de Peças Manipulador Telescopico 1200SJP 1350SJPAlessandro de OliveiraAinda não há avaliações
- Replacement Parts BUSHDocumento33 páginasReplacement Parts BUSHIsaac Rodríguez BetancourtAinda não há avaliações
- Compound CylinderDocumento11 páginasCompound CylinderLiliana Ara GubanAinda não há avaliações
- Catalogo Completo SewDocumento110 páginasCatalogo Completo SewEduardo MaggiAinda não há avaliações
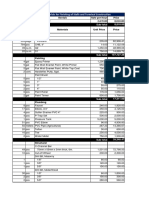
- 3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionDocumento2 páginas3 Hrs Motor Grader 2,670.00 8,010.00: Detailed Bill of Materials For Finishing of Stalls and Terminal ConstructionKris Aileen CortezAinda não há avaliações
- Detroit Parts 8V71 & 12V71Documento47 páginasDetroit Parts 8V71 & 12V71indra100% (2)
- Air ConditioningDocumento5 páginasAir ConditioningDC1234Ainda não há avaliações
- Problem Sheet 3 Heat, Work and The First Law of Thermodynamics PDFDocumento4 páginasProblem Sheet 3 Heat, Work and The First Law of Thermodynamics PDFS DAinda não há avaliações
- STRESSES SHAFTINGS KEYS and SPLINES COUPLINGS Feb2023 Rev0Documento15 páginasSTRESSES SHAFTINGS KEYS and SPLINES COUPLINGS Feb2023 Rev0loureniel de jesusAinda não há avaliações
- 1 Engine Overview MR479QDocumento25 páginas1 Engine Overview MR479QAdi WidiantoAinda não há avaliações
- Bircosir - NW 150: Stability and DiversityDocumento5 páginasBircosir - NW 150: Stability and Diversityjagath2005ukAinda não há avaliações
- Himalaya GasesDocumento4 páginasHimalaya Gasesmitr_mmAinda não há avaliações
- Review On Comparative Analysis of PSC Box Girder Bridge and PSC Precast I Girder Bridge StructureDocumento11 páginasReview On Comparative Analysis of PSC Box Girder Bridge and PSC Precast I Girder Bridge StructureIJRASETPublicationsAinda não há avaliações
- Regolatore Aspirazione Rh38EDocumento2 páginasRegolatore Aspirazione Rh38EДжон ДиллинджерAinda não há avaliações
- GPB 180Documento1 páginaGPB 180sungkarsAinda não há avaliações
- 530 - Dryers ManualDocumento4 páginas530 - Dryers ManualmecambAinda não há avaliações
- Dahilog Chemistry Activity On Gas LawsDocumento7 páginasDahilog Chemistry Activity On Gas LawsYbur Clieve Olsen DahilogAinda não há avaliações
- A Pathway to Decarbonise the Shipping Sector by 2050No EverandA Pathway to Decarbonise the Shipping Sector by 2050Ainda não há avaliações
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterNo EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterAinda não há avaliações
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionNota: 5 de 5 estrelas5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesNo EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesNota: 4.5 de 5 estrelas4.5/5 (21)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!Ainda não há avaliações
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsAinda não há avaliações
- Shorting the Grid: The Hidden Fragility of Our Electric GridNo EverandShorting the Grid: The Hidden Fragility of Our Electric GridNota: 4.5 de 5 estrelas4.5/5 (2)