Você também pode gostar
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsAinda não há avaliações
- 1992 - A Method For Registration of 3-D Shapes - ICP - OKDocumento18 páginas1992 - A Method For Registration of 3-D Shapes - ICP - OKluongxuandanAinda não há avaliações
- Line Drawing Algorithm: Mastering Techniques for Precision Image RenderingNo EverandLine Drawing Algorithm: Mastering Techniques for Precision Image RenderingAinda não há avaliações
- Simulink Design of Pipelined CORDIC For Generation of Sine and Cosine ValuesDocumento5 páginasSimulink Design of Pipelined CORDIC For Generation of Sine and Cosine ValuesInternational Journal of computational Engineering research (IJCER)Ainda não há avaliações
- Planar Linkage Synthesis: A modern CAD based approachNo EverandPlanar Linkage Synthesis: A modern CAD based approachAinda não há avaliações
- Besl 1992 Method For Registration of 3D ShapesDocumento21 páginasBesl 1992 Method For Registration of 3D Shapesdanasolav1798Ainda não há avaliações
- Latex SubmissionDocumento6 páginasLatex SubmissionguluAinda não há avaliações
- Another Simple But Faster Method For 2D Line ClippingDocumento15 páginasAnother Simple But Faster Method For 2D Line ClippingijcgaAinda não há avaliações
- A Region-Based Model and Binary Level Set Function Applied To Weld Defects Detection in Radiographic ImagesDocumento9 páginasA Region-Based Model and Binary Level Set Function Applied To Weld Defects Detection in Radiographic ImagesInternational Journal of New Computer Architectures and their Applications (IJNCAA)Ainda não há avaliações
- 2.1. Representation of Curves: Geometric ModelingDocumento88 páginas2.1. Representation of Curves: Geometric ModelingSrinith KumarAinda não há avaliações
- 2.1. Representation of Curves: Geometric ModelingDocumento88 páginas2.1. Representation of Curves: Geometric ModelingSrinith KumarAinda não há avaliações
- Interpolation Algorithm Based On Central Angle DivisionDocumento6 páginasInterpolation Algorithm Based On Central Angle DivisionmtrietdinhbkAinda não há avaliações
- Efficient Simplificaiton of Point Sampled SurfacesDocumento8 páginasEfficient Simplificaiton of Point Sampled SurfacesVivian LiAinda não há avaliações
- 3D Morphing Without User Interaction: Submitted To Eurographics Symposium On Geometry Processing (2004)Documento10 páginas3D Morphing Without User Interaction: Submitted To Eurographics Symposium On Geometry Processing (2004)tsigelakistisAinda não há avaliações
- 1991 Tristage Hough Transform For Multiple Ellipse ExtractionDocumento9 páginas1991 Tristage Hough Transform For Multiple Ellipse ExtractionNaranbaatar ErdenesurenAinda não há avaliações
- Brown University Department of Computer Science Master's Project CS-89-M6Documento68 páginasBrown University Department of Computer Science Master's Project CS-89-M6Yaaqoub GueblaAinda não há avaliações
- The Stencil Buffer Sweep Plane Algorithm For 5-Axis CNC Tool Path VerificationDocumento14 páginasThe Stencil Buffer Sweep Plane Algorithm For 5-Axis CNC Tool Path VerificationHuy TranAinda não há avaliações
- Fpga Design and Implementation of A Scan Conversion Graphical Sub-SystemDocumento13 páginasFpga Design and Implementation of A Scan Conversion Graphical Sub-SystemNeam Al KhayatAinda não há avaliações
- TVCG 2010 02 0054.R2Documento15 páginasTVCG 2010 02 0054.R2Abdul WaresAinda não há avaliações
- Simulation-Based Automatic Generation Signomial and Posynomial Performance Models Analog Integrated Circuit SizingDocumento5 páginasSimulation-Based Automatic Generation Signomial and Posynomial Performance Models Analog Integrated Circuit Sizingsuchi87Ainda não há avaliações
- A Double Step Algorithm For Rendering Parabolic CurvesDocumento1 páginaA Double Step Algorithm For Rendering Parabolic Curvessamuel fikiruAinda não há avaliações
- Smooth GPU TessellationDocumento9 páginasSmooth GPU TessellationAde LadeAinda não há avaliações
- Arc Length Parameter InterpolationDocumento10 páginasArc Length Parameter InterpolationLim AndrewAinda não há avaliações
- Surface Reconstruction by Layer PeelingDocumento11 páginasSurface Reconstruction by Layer PeelingJaved_AalamAinda não há avaliações
- Chapter 4 CurvesDocumento21 páginasChapter 4 CurvesN Dhanunjaya Rao BorraAinda não há avaliações
- Approximating Curve by A Single Segment of B-Splin PDFDocumento9 páginasApproximating Curve by A Single Segment of B-Splin PDFTrivianniAinda não há avaliações
- English 1st SemDocumento34 páginasEnglish 1st SemSRUJAN KALYANAinda não há avaliações
- B-Spline Surface Fitting by Iterative Geometric Interpolation Approximation AlgorithmsDocumento12 páginasB-Spline Surface Fitting by Iterative Geometric Interpolation Approximation AlgorithmsMii IcaAinda não há avaliações
- Constrained Fitting of B-Spline Curves Based Onthe Force Density MethodDocumento7 páginasConstrained Fitting of B-Spline Curves Based Onthe Force Density MethodBobAinda não há avaliações
- Reverse Engineering of A Symmetric Object: Minho Chang, Sang C. ParkDocumento10 páginasReverse Engineering of A Symmetric Object: Minho Chang, Sang C. Parkivanlira04Ainda não há avaliações
- Fully-Pipelined VLSI Architectures The Kinematics of Robot ManipulatorsDocumento7 páginasFully-Pipelined VLSI Architectures The Kinematics of Robot ManipulatorskiranvlsiAinda não há avaliações
- Resolution Independent Curve Rendering Using Programmable Graphics HardwareDocumento10 páginasResolution Independent Curve Rendering Using Programmable Graphics HardwarearanhilAinda não há avaliações
- Mam 005Documento8 páginasMam 005dharamuuAinda não há avaliações
- Generalized-ICP: Aleksandr V. Segal Dirk Haehnel Sebastian ThrunDocumento8 páginasGeneralized-ICP: Aleksandr V. Segal Dirk Haehnel Sebastian ThrunJasAinda não há avaliações
- A Vertex Chain Code Approach For Image Recognition: ICGST-GVIP Journal, Volume 5, Issue3, March 2005Documento8 páginasA Vertex Chain Code Approach For Image Recognition: ICGST-GVIP Journal, Volume 5, Issue3, March 2005Marguerite FlowerAinda não há avaliações
- Discrete B-Splines and Subdivision Techniques in Computer-Aided Geometric Design and Computer Graphics PDFDocumento26 páginasDiscrete B-Splines and Subdivision Techniques in Computer-Aided Geometric Design and Computer Graphics PDF姜豪Ainda não há avaliações
- Icra09 TaskSpaceTrajectoriesCubicSplineOptimizationDocumento8 páginasIcra09 TaskSpaceTrajectoriesCubicSplineOptimizationsigmateAinda não há avaliações
- Parametric NURBS Curve Interpolators A ReviewDocumento9 páginasParametric NURBS Curve Interpolators A ReviewSekar Mohan100% (1)
- Computer GraphicsDocumento16 páginasComputer GraphicsHema Sudarshan VAinda não há avaliações
- An Optimization-Based Computational Method For Surface Fitting To Update The Geometric Information of An Existing B-Rep CAD ModelDocumento8 páginasAn Optimization-Based Computational Method For Surface Fitting To Update The Geometric Information of An Existing B-Rep CAD ModelAguz JmjAinda não há avaliações
- Parallel Skyline Method Using Two Dimensional ArrayDocumento14 páginasParallel Skyline Method Using Two Dimensional ArraydaskhagoAinda não há avaliações
- 03 0121Documento6 páginas03 0121trossouwAinda não há avaliações
- 1988 - Rendering Trimmed NURBS With Adaptive Forward DifferencingDocumento10 páginas1988 - Rendering Trimmed NURBS With Adaptive Forward Differencingzxwx1111Ainda não há avaliações
- Digital Ink Compression Via Functional ApproximationDocumento7 páginasDigital Ink Compression Via Functional ApproximationHanane AlliouiAinda não há avaliações
- Geometric Approaches: 1. What Is A Finite Precision Line?Documento10 páginasGeometric Approaches: 1. What Is A Finite Precision Line?naru_saAinda não há avaliações
- Cube-To-Sphere Projections For Procedural Texturing and BeyondDocumento22 páginasCube-To-Sphere Projections For Procedural Texturing and Beyondqrwyy8763876Ainda não há avaliações
- 384 FTPDocumento2 páginas384 FTPRavindra MRAinda não há avaliações
- A Novel WVD Approach For Estimating and Correcting Skew Angle of Odia Handwritten Document ImageDocumento7 páginasA Novel WVD Approach For Estimating and Correcting Skew Angle of Odia Handwritten Document Imageeditor_ijarcsseAinda não há avaliações
- Types PhotosDocumento6 páginasTypes PhotosMido MoussaAinda não há avaliações
- Best Fit Vert AlignmentDocumento9 páginasBest Fit Vert AlignmentSuciu FlorinAinda não há avaliações
- Improving Zernike Moments Comparison For Optimal Similarity and Rotation Angle RetrievalDocumento13 páginasImproving Zernike Moments Comparison For Optimal Similarity and Rotation Angle RetrievalErick SutionoAinda não há avaliações
- An Approach For Utility Pole Recognition in Real Conditions: Lecture Notes in Computer Science January 2014Documento10 páginasAn Approach For Utility Pole Recognition in Real Conditions: Lecture Notes in Computer Science January 2014Reo DeraAinda não há avaliações
- Unit 3 More Output Primitives and Geometric TransformationsDocumento24 páginasUnit 3 More Output Primitives and Geometric TransformationsMuhammad SahilAinda não há avaliações
- ME6501-Computer Aided Design PDFDocumento8 páginasME6501-Computer Aided Design PDFVijay ShankarAinda não há avaliações
- Exact and Approximate Construction of Offset Polygons: Ron WeinDocumento10 páginasExact and Approximate Construction of Offset Polygons: Ron Weinetet103Ainda não há avaliações
- Space Curve Interpolation For CNC Machines: Sotiris L. OmirouDocumento8 páginasSpace Curve Interpolation For CNC Machines: Sotiris L. OmirouPhan Văn Đại AnAinda não há avaliações
- Decoupling of Fluid and Thermo Elastic Simulations On Machine - 2017 - ProcediaDocumento6 páginasDecoupling of Fluid and Thermo Elastic Simulations On Machine - 2017 - ProcediaDEEPESH KUMARAinda não há avaliações
- Constraining Wavelets Cg2007 OlsenDocumento31 páginasConstraining Wavelets Cg2007 OlsenmechsoftservicesAinda não há avaliações
- Franklin Note 2Documento21 páginasFranklin Note 2WylieAinda não há avaliações
- Rapid Deployment of Reconfigurable Assembly Fixtures Using Workspace Synthesis and Visibility AnalysisDocumento4 páginasRapid Deployment of Reconfigurable Assembly Fixtures Using Workspace Synthesis and Visibility AnalysisAbhinav KauraAinda não há avaliações
- GPSC Study Material 1Documento7 páginasGPSC Study Material 1jigar00775Ainda não há avaliações
- List of Countries and Capitals With Currency and Language PDFDocumento25 páginasList of Countries and Capitals With Currency and Language PDFjigar00775Ainda não há avaliações
- Sardar Patel University: Application Fee: Rs.250/-For Non-Teaching Post For Office Use OnlyDocumento5 páginasSardar Patel University: Application Fee: Rs.250/-For Non-Teaching Post For Office Use Onlyjigar00775Ainda não há avaliações
- Are You On Track With Your Training?: Injury Prevention and Nutrition For Track AthletesDocumento55 páginasAre You On Track With Your Training?: Injury Prevention and Nutrition For Track Athletesjigar00775Ainda não há avaliações
- Barefoot RunningDocumento43 páginasBarefoot Runningjigar00775100% (1)
- Sri Satya Sai University of Technology and Medical Sciences, Sehore (M.P.)Documento11 páginasSri Satya Sai University of Technology and Medical Sciences, Sehore (M.P.)jigar00775Ainda não há avaliações
- Exercise InducedDocumento63 páginasExercise Inducedjigar00775Ainda não há avaliações
- Sub Registrar - Grade II (CL-III) Exam - 9th June 2013Documento3 páginasSub Registrar - Grade II (CL-III) Exam - 9th June 2013jigar00775Ainda não há avaliações
- Reference List of Synonyms PDFDocumento18 páginasReference List of Synonyms PDFpiyush13juAinda não há avaliações
- Sub Registrar - Grade II (CL-III) Exam - 9th June 2013Documento3 páginasSub Registrar - Grade II (CL-III) Exam - 9th June 2013jigar00775Ainda não há avaliações
- EAS Vocabulary U1 SampleDocumento8 páginasEAS Vocabulary U1 Samplejigar00775Ainda não há avaliações
- Called For Document Verification List1Documento141 páginasCalled For Document Verification List1jigar00775Ainda não há avaliações
- Mukhya Sevika Answer Key 2015Documento1 páginaMukhya Sevika Answer Key 2015jigar00775Ainda não há avaliações
- Alist2Documento56 páginasAlist2jigar00775Ainda não há avaliações
- Strassen's Matrix MultiplcationDocumento13 páginasStrassen's Matrix MultiplcationSaurav SharmaAinda não há avaliações
- Is Zc415 (Data Mining BITS-WILP)Documento4 páginasIs Zc415 (Data Mining BITS-WILP)Anonymous Lz6f4C6KFAinda não há avaliações
- Binary AdditionDocumento2 páginasBinary AdditionMian NakaharaAinda não há avaliações
- The Econometrics of Financial Markets: John Y. Campbell Andrew W. Lo A. Craig MackinlayDocumento7 páginasThe Econometrics of Financial Markets: John Y. Campbell Andrew W. Lo A. Craig MackinlaygwydiorAinda não há avaliações
- Estimation of Discharge Using Unit HydrographDocumento3 páginasEstimation of Discharge Using Unit HydrographCee-jay BihasaAinda não há avaliações
- Adobe Scan 14 Oct 2023Documento10 páginasAdobe Scan 14 Oct 2023anchalrwt16Ainda não há avaliações
- Lecturemodule1 Introduction 1Documento31 páginasLecturemodule1 Introduction 1Ariff AziziAinda não há avaliações
- Even and Odd Parity Generator and Checker Using The Reversible Logic GatesDocumento5 páginasEven and Odd Parity Generator and Checker Using The Reversible Logic GatesInternational Journal of Computer Science and Engineering Communications100% (2)
- Appendix: Differentiation, Integration, and OptimizationDocumento28 páginasAppendix: Differentiation, Integration, and OptimizationChairil AfandyAinda não há avaliações
- Floating Point Addition and Subtraction AlgorithmDocumento10 páginasFloating Point Addition and Subtraction Algorithmvishnu_dexter2935100% (3)
- Heuristic SearchDocumento68 páginasHeuristic SearchRocky SinghAinda não há avaliações
- Shrinkage Parameter Selection Via Modified Cross Validation Approach For Ridge Regression ModelDocumento10 páginasShrinkage Parameter Selection Via Modified Cross Validation Approach For Ridge Regression ModelGHULAM MURTAZAAinda não há avaliações
- AI HandoutDocumento26 páginasAI HandoutMarkapuri Santhoash kumarAinda não há avaliações
- Vlsi Physical DesignDocumento26 páginasVlsi Physical Designilias ahmed100% (1)
- Midterm Examination in General Mathematics 11 2022-2023Documento6 páginasMidterm Examination in General Mathematics 11 2022-2023Benjie PogoyAinda não há avaliações
- Industrial Automation and Control Systems - Chapter 1 - Basic Concepts of MeasurementsDocumento21 páginasIndustrial Automation and Control Systems - Chapter 1 - Basic Concepts of MeasurementsHasan IsmailAinda não há avaliações
- Transient Conduction: Spatial Effects, Semi-Infinite Solids, and Finite-Difference MethodsDocumento58 páginasTransient Conduction: Spatial Effects, Semi-Infinite Solids, and Finite-Difference MethodsJkun gamingAinda não há avaliações
- Performance Evaluation of Non-Latin Characters Based (Arabic) Symmetric Encryption AlgorithmDocumento9 páginasPerformance Evaluation of Non-Latin Characters Based (Arabic) Symmetric Encryption AlgorithmInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- Public VersionDocumento170 páginasPublic Versionvalber8Ainda não há avaliações
- FfcodeDocumento5 páginasFfcodeapi-240417748Ainda não há avaliações
- NCERT Solutions For Class 12 Maths Chapter 12 Linear ProgrammingDocumento49 páginasNCERT Solutions For Class 12 Maths Chapter 12 Linear Programmingعلي حميد زغيرAinda não há avaliações
- Mit6 251JF09 SDPDocumento51 páginasMit6 251JF09 SDPtap1cseAinda não há avaliações
- EE 456 Decoupled and Fast Decoupled Power Flow, Fall 2014Documento26 páginasEE 456 Decoupled and Fast Decoupled Power Flow, Fall 2014Fengxing ZhuAinda não há avaliações
- Lecture Six Pushdown Automata (Pda)Documento9 páginasLecture Six Pushdown Automata (Pda)Colmain NassiriAinda não há avaliações
- Compensator Design Using Bode PlotDocumento24 páginasCompensator Design Using Bode PlotShah JayAinda não há avaliações
- Ex 6Documento16 páginasEx 6api-322416213Ainda não há avaliações
- Mtech Ai MLDocumento19 páginasMtech Ai MLAnju Chandran TAinda não há avaliações
- Assignment 2Documento6 páginasAssignment 2Alok KumarAinda não há avaliações
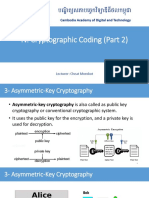
- 4.2. Cryptographic Coding (Part 2)Documento27 páginas4.2. Cryptographic Coding (Part 2)ReachAinda não há avaliações
- Numerical Methods: Dr. Nasir M MirzaDocumento27 páginasNumerical Methods: Dr. Nasir M MirzaarafatasgharAinda não há avaliações
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeNo EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeNota: 4 de 5 estrelas4/5 (2)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Ainda não há avaliações
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsNo EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsNota: 4.5 de 5 estrelas4.5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormNo EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormNota: 5 de 5 estrelas5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.No EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Nota: 5 de 5 estrelas5/5 (1)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryNo EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryAinda não há avaliações
- Calculus Workbook For Dummies with Online PracticeNo EverandCalculus Workbook For Dummies with Online PracticeNota: 3.5 de 5 estrelas3.5/5 (8)
- Mental Math Secrets - How To Be a Human CalculatorNo EverandMental Math Secrets - How To Be a Human CalculatorNota: 5 de 5 estrelas5/5 (3)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)No EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Ainda não há avaliações
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingNo EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingNota: 4.5 de 5 estrelas4.5/5 (21)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathNo EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathNota: 5 de 5 estrelas5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsNo EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsNota: 3.5 de 5 estrelas3.5/5 (9)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldNo EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldNota: 3 de 5 estrelas3/5 (80)