Você também pode gostar
- Embedded - Systems - II SemDocumento24 páginasEmbedded - Systems - II SemravinarsingojuAinda não há avaliações
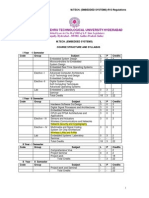
- JNTU Hyderabad M.tech Embedded Systems Vlsi Design Syllabus BookDocumento23 páginasJNTU Hyderabad M.tech Embedded Systems Vlsi Design Syllabus Booksartaj48Ainda não há avaliações
- Vlsi System DesignDocumento12 páginasVlsi System DesignMahender GoudAinda não há avaliações
- Vlsi DesignDocumento12 páginasVlsi DesignTanveer AhmedAinda não há avaliações
- M.E.embedded System TechnologiesDocumento32 páginasM.E.embedded System TechnologiesSri RamAinda não há avaliações
- 04 Syllabus M.tech ESD Final - AmbpsDocumento21 páginas04 Syllabus M.tech ESD Final - Ambpsnikky234Ainda não há avaliações
- White Papers On Ieee 802.19Documento33 páginasWhite Papers On Ieee 802.19JAUNITHAAinda não há avaliações
- Emb Sys TecDocumento39 páginasEmb Sys TecYuvaperiyasamy MayilsamyAinda não há avaliações
- ES Syllabus ECE PDFDocumento12 páginasES Syllabus ECE PDFramanaidu1Ainda não há avaliações
- M E EmbeddedSystemTechnologiesDocumento31 páginasM E EmbeddedSystemTechnologiesRohini BabuAinda não há avaliações
- UntitledDocumento12 páginasUntitledSathiyaraj MurugarajAinda não há avaliações
- Microcontroller Architecture and Organization: Unit IDocumento6 páginasMicrocontroller Architecture and Organization: Unit IhemanthdreamzAinda não há avaliações
- Vit Ece 5th Year SyllabusDocumento16 páginasVit Ece 5th Year Syllabuspranavateja12399Ainda não há avaliações
- Jawaharlal Nehru Technological University Hyderabad M.Tech. Degree COURSE STRUCTURE in Vlsi I YEAR - I Semester Code Group Subject L P CreditsDocumento12 páginasJawaharlal Nehru Technological University Hyderabad M.Tech. Degree COURSE STRUCTURE in Vlsi I YEAR - I Semester Code Group Subject L P Creditsshaker423Ainda não há avaliações
- Vlsi Vlsid Vlsisd Vlsi Me Ece PDFDocumento18 páginasVlsi Vlsid Vlsisd Vlsi Me Ece PDFramanaidu1Ainda não há avaliações
- Software For Embedded SystemDocumento39 páginasSoftware For Embedded Systemjani28cseAinda não há avaliações
- ARM Processor Embedded Systems DesignDocumento6 páginasARM Processor Embedded Systems Designjayarajan0% (1)
- Embedded SyallabusDocumento12 páginasEmbedded SyallabusSree NivasAinda não há avaliações
- Eee Vi Embedded Systems (10ee665) NotesDocumento75 páginasEee Vi Embedded Systems (10ee665) Notesanittadevadas50% (2)
- Es IiDocumento16 páginasEs IiSivasankar YalavarthyAinda não há avaliações
- Vlsi Mtech Jntu Kakinada II Sem SyllabusDocumento16 páginasVlsi Mtech Jntu Kakinada II Sem Syllabusrv prasad50% (2)
- IOT to ASIC: A Complete GuideDocumento7 páginasIOT to ASIC: A Complete GuideManu ManuAinda não há avaliações
- ME VLSI & EmdDocumento58 páginasME VLSI & EmdAnil V. WalkeAinda não há avaliações
- Emb PT 08Documento21 páginasEmb PT 08Anonymous IjquQOmAinda não há avaliações
- Embedded Systems for Instrumentation INSTDocumento2 páginasEmbedded Systems for Instrumentation INSTRohan KoliAinda não há avaliações
- EmbeddedDocumento9 páginasEmbeddedNanc Joy100% (1)
- M.Tech 2nd SemesterDocumento14 páginasM.Tech 2nd SemesterSivaramsharma RupavathamAinda não há avaliações
- EC2023D Microprocessors and MicrocontrollersDocumento1 páginaEC2023D Microprocessors and MicrocontrollersPramu SAinda não há avaliações
- SyllabusDocumento5 páginasSyllabusKakashiGanzAinda não há avaliações
- M.tech-ECE-Embedded Systems (ES) - SEM1 Course Structure & SyllabiDocumento8 páginasM.tech-ECE-Embedded Systems (ES) - SEM1 Course Structure & Syllabisatraj5Ainda não há avaliações
- B.Tech. (CSE) Scheme (For Candidates Admitted From 2008 Onwards) New Syllabus Semester ViDocumento8 páginasB.Tech. (CSE) Scheme (For Candidates Admitted From 2008 Onwards) New Syllabus Semester ViDivya KannanAinda não há avaliações
- Irungattukottai, Sriperumbudur, Chennai - 602 117. Ph:044-71224401 - 08. Fax: 044 - 71224410Documento3 páginasIrungattukottai, Sriperumbudur, Chennai - 602 117. Ph:044-71224401 - 08. Fax: 044 - 71224410Chiranjeevi CbAinda não há avaliações
- Irungattukottai, Sriperumbudur, Chennai - 602 117. Ph:044-71224401 - 08. Fax: 044 - 71224410Documento3 páginasIrungattukottai, Sriperumbudur, Chennai - 602 117. Ph:044-71224401 - 08. Fax: 044 - 71224410Chiranjeevi CbAinda não há avaliações
- Irungattukottai, Sriperumbudur, Chennai - 602 117. Ph:044-71224401 - 08. Fax: 044 - 71224410Documento3 páginasIrungattukottai, Sriperumbudur, Chennai - 602 117. Ph:044-71224401 - 08. Fax: 044 - 71224410Chiranjeevi CbAinda não há avaliações
- MR3391 SyllabusDocumento1 páginaMR3391 Syllabusadmission1.gojanAinda não há avaliações
- Embedded Syllabus 2013Documento23 páginasEmbedded Syllabus 2013Mohammad SalmanAinda não há avaliações
- System On Chip Design and ModellingDocumento131 páginasSystem On Chip Design and ModellingGurram KishoreAinda não há avaliações
- Detailed Syllabus1Documento17 páginasDetailed Syllabus1DheereshAinda não há avaliações
- Ae IIDocumento27 páginasAe IIAnbu SelvanAinda não há avaliações
- MG Btech 3rd Sem Cs SyllabusDocumento44 páginasMG Btech 3rd Sem Cs SyllabusJinu MadhavanAinda não há avaliações
- EMBEDDED SYSTEM-unit-1Documento119 páginasEMBEDDED SYSTEM-unit-112 EE234 Santhosh kumar sAinda não há avaliações
- Microprocessor & Microcontroller NotesDocumento80 páginasMicroprocessor & Microcontroller Notesgokul docAinda não há avaliações
- Cse 2022Documento626 páginasCse 2022inkyAinda não há avaliações
- Vlsi PT 2nd Year SyllabusDocumento20 páginasVlsi PT 2nd Year SyllabusMANGAL KUMAR MOHAPATRAAinda não há avaliações
- Microcontrollers: Introduction to 8051 and MSP430Documento124 páginasMicrocontrollers: Introduction to 8051 and MSP430ManojKumarAinda não há avaliações
- Embedded Systems Other College SyllabusDocumento13 páginasEmbedded Systems Other College SyllabusKavitha SubramaniamAinda não há avaliações
- Vlsi Design PDFDocumento22 páginasVlsi Design PDFKishore KumarAinda não há avaliações
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Ainda não há avaliações
- Digital Electronics, Computer Architecture and Microprocessor Design PrinciplesNo EverandDigital Electronics, Computer Architecture and Microprocessor Design PrinciplesAinda não há avaliações
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsNo EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsNota: 3 de 5 estrelas3/5 (1)
- Interfacing PIC Microcontrollers: Embedded Design by Interactive SimulationNo EverandInterfacing PIC Microcontrollers: Embedded Design by Interactive SimulationAinda não há avaliações
- Embedded Systems: Analysis and Modeling with SysML, UML and AADLNo EverandEmbedded Systems: Analysis and Modeling with SysML, UML and AADLFabrice KordonAinda não há avaliações
- The Designer's Guide to the Cortex-M Processor Family: A Tutorial ApproachNo EverandThe Designer's Guide to the Cortex-M Processor Family: A Tutorial ApproachNota: 4.5 de 5 estrelas4.5/5 (2)
- Modern Component Families and Circuit Block DesignNo EverandModern Component Families and Circuit Block DesignNota: 5 de 5 estrelas5/5 (1)
- Real Time Operating System - Assignment: Sastra UniversityDocumento2 páginasReal Time Operating System - Assignment: Sastra UniversityimbharteshAinda não há avaliações
- I SEM Lab - 8051, AVRDocumento138 páginasI SEM Lab - 8051, AVRimbharteshAinda não há avaliações
- 3 - Led Using Button in LPC 2129Documento2 páginas3 - Led Using Button in LPC 2129imbharteshAinda não há avaliações
- NS2Documento27 páginasNS2imbharteshAinda não há avaliações
- 2 - Graphical LCD in LPC 2129Documento8 páginas2 - Graphical LCD in LPC 2129imbhartesh100% (1)
- 1 - Analog To Digital Conversion in LPC2129Documento4 páginas1 - Analog To Digital Conversion in LPC2129imbharteshAinda não há avaliações
- Implemention of Semaphore Function Using LPC2378Documento8 páginasImplemention of Semaphore Function Using LPC2378imbharteshAinda não há avaliações
- Implemention of Message Queue Using LPC2148Documento5 páginasImplemention of Message Queue Using LPC2148imbharteshAinda não há avaliações
- Implemention of Mailbox Function Using LPC2378Documento5 páginasImplemention of Mailbox Function Using LPC2378imbharteshAinda não há avaliações
- Implemention of Message Queue Using LPC2378Documento9 páginasImplemention of Message Queue Using LPC2378imbharteshAinda não há avaliações
- Implemention of Mailbox Function Using LPC2148Documento5 páginasImplemention of Mailbox Function Using LPC2148imbharteshAinda não há avaliações
- Led Glowing Using LPC2378Documento2 páginasLed Glowing Using LPC2378imbharteshAinda não há avaliações
- Shaping Tinyos To Deal With Evolving Device ArchitecturesDocumento5 páginasShaping Tinyos To Deal With Evolving Device ArchitecturesimbharteshAinda não há avaliações
- Keypad Control Using LPC2378Documento4 páginasKeypad Control Using LPC2378imbharteshAinda não há avaliações
- Implemention of Mutex Function Using Lpc2378Documento6 páginasImplemention of Mutex Function Using Lpc2378imbharteshAinda não há avaliações
- Tinychat:A Chat System Based On Tinyos: Jin Xu Clemson UniversityDocumento5 páginasTinychat:A Chat System Based On Tinyos: Jin Xu Clemson UniversityimbharteshAinda não há avaliações
- TINY Os InstallationDocumento3 páginasTINY Os InstallationimbharteshAinda não há avaliações
- Mplemention of Dynamic Priority Using LPC2378Documento6 páginasMplemention of Dynamic Priority Using LPC2378imbharteshAinda não há avaliações
- 2011-06-01 NU C3 Classification TaxonomyDocumento1 página2011-06-01 NU C3 Classification TaxonomyGiovanni SantosAinda não há avaliações
- How To Disable Network Manager - Cpanel Knowledge Base - Cpanel DocumentationDocumento1 páginaHow To Disable Network Manager - Cpanel Knowledge Base - Cpanel DocumentationAhmad SantosoAinda não há avaliações
- Ios XRV 9000 Install Lab v1Documento17 páginasIos XRV 9000 Install Lab v1toni_saputroAinda não há avaliações
- Ec2043 Wireless Network Question Bank PDF FreeDocumento7 páginasEc2043 Wireless Network Question Bank PDF FreeBALAKRISHNANAinda não há avaliações
- Schneider Electric Zelio PinoutDocumento8 páginasSchneider Electric Zelio PinoutandresAinda não há avaliações
- Intelliq It Trainings: Devops Course ContentDocumento5 páginasIntelliq It Trainings: Devops Course Contentkishore112ww100% (1)
- Moxa Eds P506e Series Datasheet v1.0Documento6 páginasMoxa Eds P506e Series Datasheet v1.0Carlos Garcia Jacome DarkerAinda não há avaliações
- Chinar - Aliyev - Time Model-EngDocumento13 páginasChinar - Aliyev - Time Model-EngChinarAinda não há avaliações
- ADMSHS Emp Tech Q1 M1 L2 Software Application and PlatformsDocumento22 páginasADMSHS Emp Tech Q1 M1 L2 Software Application and PlatformsClark Domingo100% (6)
- NST Assignment 2010 NewDocumento8 páginasNST Assignment 2010 NewsekharlAinda não há avaliações
- Computer Network Lab 1Documento61 páginasComputer Network Lab 1AkshataAinda não há avaliações
- Week 1 Empowerment TechnologiesDocumento11 páginasWeek 1 Empowerment TechnologiesVillavicencio KylaAinda não há avaliações
- Revit 2015 InstallDocumento7 páginasRevit 2015 Installgerty lamserAinda não há avaliações
- Cheatsheet GCP A4Documento3 páginasCheatsheet GCP A4Anonymous kXqEoUHYCAinda não há avaliações
- SSAS-Pro IP Modification by Telnet - R5Documento3 páginasSSAS-Pro IP Modification by Telnet - R5ETO SHIRIN100% (2)
- TL-WA850RE V2 Datasheet EUDocumento3 páginasTL-WA850RE V2 Datasheet EURansomware SucksAinda não há avaliações
- MCQ - 8 PDFDocumento4 páginasMCQ - 8 PDFWillina Marie Chong MableAinda não há avaliações
- QED 1 Webinar Master Slide - FinalDocumento79 páginasQED 1 Webinar Master Slide - FinalGreg KenfieldAinda não há avaliações
- Shibboleth ArchitectureDocumento19 páginasShibboleth Architecturejuse71Ainda não há avaliações
- Expanding telecom's future role with internet integrationDocumento8 páginasExpanding telecom's future role with internet integrationremo_nemoAinda não há avaliações
- System Administration - IntroductionDocumento16 páginasSystem Administration - IntroductionZeeshan BhattiAinda não há avaliações
- Coriant Overview PresentationDocumento33 páginasCoriant Overview PresentationНиколай СабининAinda não há avaliações
- Internet ArchitectureDocumento17 páginasInternet ArchitectureNithilan AAinda não há avaliações
- Name - Aarav Sharma Class-Vi-FDocumento14 páginasName - Aarav Sharma Class-Vi-FJatin PahujaAinda não há avaliações
- BRKRST-2041-WAN Architectures and Design PrinciplesDocumento99 páginasBRKRST-2041-WAN Architectures and Design Principlespaulo_an7381100% (1)
- Eye AnatomyDocumento9 páginasEye Anatomysasa68Ainda não há avaliações
- S750 G2 User ManualDocumento34 páginasS750 G2 User ManualPillin JagAinda não há avaliações
- Linux - Configure DNS in LinuxDocumento14 páginasLinux - Configure DNS in LinuxsokhkeamAinda não há avaliações
- Ccie Data Center at A GlanceDocumento2 páginasCcie Data Center at A Glancenaveen.anjeriAinda não há avaliações
- The Face Behind The Facebook: Mark Zuckerberg's Interview With Current MagazineDocumento3 páginasThe Face Behind The Facebook: Mark Zuckerberg's Interview With Current MagazineMatthew Keys100% (1)