Você também pode gostar
- Ijett V3i2p204Documento3 páginasIjett V3i2p204surendiran123Ainda não há avaliações
- Automated Anomaly and Root Cause Detection in Distributed SystemsDocumento6 páginasAutomated Anomaly and Root Cause Detection in Distributed Systemssurendiran123Ainda não há avaliações
- Double Encryption Based Secure Biometric Authentication SystemDocumento7 páginasDouble Encryption Based Secure Biometric Authentication Systemsurendiran123Ainda não há avaliações
- A Class Based Approach For Medical Classification of Chest PainDocumento5 páginasA Class Based Approach For Medical Classification of Chest Painsurendiran123Ainda não há avaliações
- PCA Based Image Enhancement in Wavelet DomainDocumento5 páginasPCA Based Image Enhancement in Wavelet Domainsurendiran123Ainda não há avaliações
- Analysis of Leakage Reduction Technique On Different SRAM CellsDocumento6 páginasAnalysis of Leakage Reduction Technique On Different SRAM Cellssurendiran123Ainda não há avaliações
- Dynamic Modeling and Control of A Wind-Fuel Cell Through Hybrid Energy SystemDocumento5 páginasDynamic Modeling and Control of A Wind-Fuel Cell Through Hybrid Energy Systemsurendiran123Ainda não há avaliações
- Dynamic Search Algorithm Used in Unstructured Peer-to-Peer NetworksDocumento5 páginasDynamic Search Algorithm Used in Unstructured Peer-to-Peer Networkssurendiran123Ainda não há avaliações
- Analysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional DataDocumento5 páginasAnalysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional Datasurendiran123Ainda não há avaliações
- Geostatistical Analysis Research: International Journal of Engineering Trends and Technology-Volume2Issue3 - 2011Documento8 páginasGeostatistical Analysis Research: International Journal of Engineering Trends and Technology-Volume2Issue3 - 2011surendiran123Ainda não há avaliações
- A Study On Auto Theft Prevention Using GSMDocumento5 páginasA Study On Auto Theft Prevention Using GSMsurendiran123Ainda não há avaliações
- Design Architecture For Next Generation Mobile TechnologyDocumento6 páginasDesign Architecture For Next Generation Mobile Technologysurendiran123Ainda não há avaliações
- RFID-Based Mobile Robot Positioning - Sensors and TechniquesDocumento5 páginasRFID-Based Mobile Robot Positioning - Sensors and Techniquessurendiran123Ainda não há avaliações
- Transformer Less DC - DC Converter With High Step Up Voltage Gain MethodDocumento6 páginasTransformer Less DC - DC Converter With High Step Up Voltage Gain Methodsurendiran123Ainda não há avaliações
- Organizational Practices That Effects Software Quality in Software Engineering ProcessDocumento6 páginasOrganizational Practices That Effects Software Quality in Software Engineering Processsurendiran123Ainda não há avaliações
- Color Feature Extraction of Tomato Leaf DiseasesDocumento3 páginasColor Feature Extraction of Tomato Leaf Diseasessurendiran123Ainda não há avaliações
- Adaptive Active Constellation Extension Algorithm For Peak-To-Average Ratio Reduction in OfdmDocumento11 páginasAdaptive Active Constellation Extension Algorithm For Peak-To-Average Ratio Reduction in Ofdmsurendiran123Ainda não há avaliações
- Power Quality Disturbances and Protective Relays On Transmission LinesDocumento6 páginasPower Quality Disturbances and Protective Relays On Transmission Linessurendiran123Ainda não há avaliações
- Features Selection and Weight Learning For Punjabi Text SummarizationDocumento4 páginasFeatures Selection and Weight Learning For Punjabi Text Summarizationsurendiran123Ainda não há avaliações
- An Efficient Passive Approach For Quality of Service Routing in ManetsDocumento6 páginasAn Efficient Passive Approach For Quality of Service Routing in Manetssurendiran123Ainda não há avaliações
- Experimental Investigation For Welding Aspects of AISI 304 & 316 by Taguchi Technique For The Process of TIG & MIG WeldingDocumento6 páginasExperimental Investigation For Welding Aspects of AISI 304 & 316 by Taguchi Technique For The Process of TIG & MIG Weldingsurendiran123Ainda não há avaliações
- Model-Based Programming of Intelligent Embedded Systems Through Offline CompilationDocumento4 páginasModel-Based Programming of Intelligent Embedded Systems Through Offline Compilationsurendiran123Ainda não há avaliações
- VSC Based DSTATCOM & Pulse-Width Modulation For Power Quality ImprovementDocumento4 páginasVSC Based DSTATCOM & Pulse-Width Modulation For Power Quality Improvementsurendiran123Ainda não há avaliações
- Model-Driven Performance For The Pattern and Advancement of Software Exhaustive SystemsDocumento6 páginasModel-Driven Performance For The Pattern and Advancement of Software Exhaustive Systemssurendiran123Ainda não há avaliações
- Extended Linearization Technique: GPS User Position UsingDocumento4 páginasExtended Linearization Technique: GPS User Position Usingsurendiran123Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- AMN All Exams Theory Ques Collection ShuhbhamDocumento14 páginasAMN All Exams Theory Ques Collection ShuhbhamPradeep GanduAinda não há avaliações
- PTP 58400Documento2 páginasPTP 58400vasquezmanriqueAinda não há avaliações
- ADC (Analog-To-Digital Converter) and Sensor InterfacingDocumento15 páginasADC (Analog-To-Digital Converter) and Sensor InterfacingAbdullah MuzammilAinda não há avaliações
- Powervu Model D9835 Satellite Receiver: DescriptionDocumento4 páginasPowervu Model D9835 Satellite Receiver: DescriptionANALA AFFIGNEAinda não há avaliações
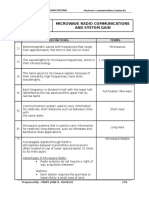
- (Chapter 24) Microwave Radio Communications and System Gain (178-186)Documento9 páginas(Chapter 24) Microwave Radio Communications and System Gain (178-186)Kim OliverAinda não há avaliações
- ENT186 Pspice Simulation-Ver2018Documento42 páginasENT186 Pspice Simulation-Ver2018SinyxAinda não há avaliações
- ReceiversDocumento12 páginasReceiversDavid van TeeselingAinda não há avaliações
- Low Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionDocumento13 páginasLow Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionJose Adolfo Monteverde SalazarAinda não há avaliações
- XDM 300 PDFDocumento30 páginasXDM 300 PDFHipolitomvn100% (1)
- Digital Control System Analysis & DesignDocumento5 páginasDigital Control System Analysis & DesignTrinh Le TanAinda não há avaliações
- MATLAB Simulation of A Wireless Communication System Using OFDM PrincipleDocumento13 páginasMATLAB Simulation of A Wireless Communication System Using OFDM PrincipleMokone Pro MokoneAinda não há avaliações
- Texas Statewide Interoperability Channel Plan PDFDocumento33 páginasTexas Statewide Interoperability Channel Plan PDFKenneth Lee EnnisAinda não há avaliações
- ECS455 - Lecture1 - SlidesDocumento17 páginasECS455 - Lecture1 - Slidessabri karaAinda não há avaliações
- Rci-2950 Rci-2970 - 150: DX DXDocumento11 páginasRci-2950 Rci-2970 - 150: DX DXbellscb100% (2)
- Television and Video Engineering: Unit-5Documento57 páginasTelevision and Video Engineering: Unit-5Anonymous GTb7FF3sTrAinda não há avaliações
- PGT316 Lecture 6Documento111 páginasPGT316 Lecture 6mid_cycloneAinda não há avaliações
- NSA Measurement MethodDocumento7 páginasNSA Measurement MethodkshemantAinda não há avaliações
- Study of LoraDocumento6 páginasStudy of LoraAnimeshAinda não há avaliações
- HemisphereGNSS A325 DataSheet 12Documento2 páginasHemisphereGNSS A325 DataSheet 12edicson ramos hurtadoAinda não há avaliações
- AAT TECH TALK SSPPTXDocumento16 páginasAAT TECH TALK SSPPTXarvapally shashidharAinda não há avaliações
- Ec7103 - Antennas & Wave PropagationDocumento10 páginasEc7103 - Antennas & Wave PropagationValerie LaneAinda não há avaliações
- BSNL Multiple BoostersDocumento2 páginasBSNL Multiple BoostersLalith KumarAinda não há avaliações
- IAMSARDocumento13 páginasIAMSARatinder1375% (4)
- Simple Methods For Detecting Zero CrossingDocumento5 páginasSimple Methods For Detecting Zero CrossingOsramAinda não há avaliações
- Precision RF & Microwave ComponentsDocumento96 páginasPrecision RF & Microwave Componentsmike_net8903Ainda não há avaliações
- JMA MX06FIT845-02 Spec SheetDocumento3 páginasJMA MX06FIT845-02 Spec SheetAmanda HubbardAinda não há avaliações
- Hameg 1004 (1004-3) Oscilloscope Calibration, Manual, Board LayoutDocumento60 páginasHameg 1004 (1004-3) Oscilloscope Calibration, Manual, Board LayoutThiago22% (9)
- Cs TC Datasheet An PRC 160v Wideband HF VHF Tactical RadioDocumento2 páginasCs TC Datasheet An PRC 160v Wideband HF VHF Tactical Radiolmahkuk2Ainda não há avaliações
- Product-Description OSN8800 PDFDocumento755 páginasProduct-Description OSN8800 PDFFürst AdemarAinda não há avaliações
- 742218V01Documento2 páginas742218V01mustaq120% (1)