Você também pode gostar
- ALSTOM Fuse Failure Relay VAPM31 High ResDocumento4 páginasALSTOM Fuse Failure Relay VAPM31 High ResThirumalAinda não há avaliações
- Transformer Maintenance Checklist - 5 Must Do Routine ChecksDocumento3 páginasTransformer Maintenance Checklist - 5 Must Do Routine Checksmurthy237Ainda não há avaliações
- Condition Monitoring and Fault Diagnosis of Electrical MachineDocumento8 páginasCondition Monitoring and Fault Diagnosis of Electrical Machinemurthy237Ainda não há avaliações
- View Solution: Subjectwise Test 1 (EE) NetworksDocumento25 páginasView Solution: Subjectwise Test 1 (EE) Networksmurthy237Ainda não há avaliações
- Electronics Lab ManualDocumento92 páginasElectronics Lab ManualVolodya SmolyakAinda não há avaliações
- Power Cable Catalogue 2012Documento222 páginasPower Cable Catalogue 2012iaessackjeeAinda não há avaliações
- Solar PVDocumento8 páginasSolar PVmurthy237Ainda não há avaliações
- High-Power Density Design of A Soft-Switching High-Power Bidirectional DC-DC ConverterDocumento9 páginasHigh-Power Density Design of A Soft-Switching High-Power Bidirectional DC-DC Convertermurthy237Ainda não há avaliações
- DC DC ConvertersDocumento4 páginasDC DC Convertersmurthy237Ainda não há avaliações
- High Efficiency Multicrystal Photovoltaic Module: Cutting-Edge TechnologyDocumento2 páginasHigh Efficiency Multicrystal Photovoltaic Module: Cutting-Edge Technologymurthy237Ainda não há avaliações
- Digital Control and State Variable Methods by M GopalDocumento838 páginasDigital Control and State Variable Methods by M GopalCyril Robinson Azariah John80% (15)
- New Single-Phase Active Power Filter: Idc (T)Documento6 páginasNew Single-Phase Active Power Filter: Idc (T)murthy237Ainda não há avaliações
- Faculty of Engineering: Electrical and Electronic Engineering DepartmentDocumento8 páginasFaculty of Engineering: Electrical and Electronic Engineering Departmentmurthy237Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Super Vag K Can v4.8 User Manual PDFDocumento11 páginasSuper Vag K Can v4.8 User Manual PDFroberto caiado100% (1)
- Eplan Power1 17 Eplan Software & Service GMBH & Co. KGDocumento11 páginasEplan Power1 17 Eplan Software & Service GMBH & Co. KGTinto TenAinda não há avaliações
- (CONSOLE) Dress - Undress Anyone - Skyrim Mod Talk - The Nexus ForumsDocumento3 páginas(CONSOLE) Dress - Undress Anyone - Skyrim Mod Talk - The Nexus ForumsHugoAinda não há avaliações
- Confidential NOT FOR External USE: Operator'S ManualDocumento142 páginasConfidential NOT FOR External USE: Operator'S ManualEnrique Potrero100% (1)
- Dark Planets by SlidesgoDocumento52 páginasDark Planets by SlidesgoFadhilAqsaPranaAinda não há avaliações
- Overview 3. Checklist 5. Link Fault Pass Through (LFP) : Link Loss Return (LLR)Documento2 páginasOverview 3. Checklist 5. Link Fault Pass Through (LFP) : Link Loss Return (LLR)daniloa47Ainda não há avaliações
- Laboratory Exercise # 1: Debug Facility Part 1Documento8 páginasLaboratory Exercise # 1: Debug Facility Part 1RyanAinda não há avaliações
- Alter Database Backup Controlfile To Trace - PM-DB PDFDocumento3 páginasAlter Database Backup Controlfile To Trace - PM-DB PDFChander ShekharAinda não há avaliações
- UiPath String ManipulationDocumento3 páginasUiPath String ManipulationGovindan M SundaramAinda não há avaliações
- Questions and Key Answer A. Multiple Choice Put The Cross (O) On The Letter A, B, or C For The Correct Answer!Documento2 páginasQuestions and Key Answer A. Multiple Choice Put The Cross (O) On The Letter A, B, or C For The Correct Answer!FATHNISAH NURSAHBAN HZAinda não há avaliações
- Micro MarkDocumento116 páginasMicro MarkCem AvciAinda não há avaliações
- Combination of Stochastic Degradation Processes Based On Accelerated Degradation Tests Applied To Photovoltaic ModulesDocumento9 páginasCombination of Stochastic Degradation Processes Based On Accelerated Degradation Tests Applied To Photovoltaic ModulesRANDRIAMAHEFA Alido SoidryAinda não há avaliações
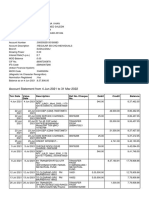
- Account Statement From 4 Jun 2021 To 31 Mar 2022: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocumento3 páginasAccount Statement From 4 Jun 2021 To 31 Mar 2022: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceSaleem KhanAinda não há avaliações
- MOVIETICKETBOOKINGDocumento22 páginasMOVIETICKETBOOKINGnaman rawatAinda não há avaliações
- Evaluating Concrete Pavement Dowel Bar Alignment Using Magnetic Pulse InductionDocumento6 páginasEvaluating Concrete Pavement Dowel Bar Alignment Using Magnetic Pulse Inductionmohammed karasnehAinda não há avaliações
- RAID LevelsDocumento10 páginasRAID LevelsJon SmithAinda não há avaliações
- Software For Automatic Potentiometric TitratorDocumento8 páginasSoftware For Automatic Potentiometric Titratorstr_ilaAinda não há avaliações
- Switch Amplifier KFD2-SR2-Ex1.W: FunctionDocumento6 páginasSwitch Amplifier KFD2-SR2-Ex1.W: FunctionDimaco VideoAinda não há avaliações
- IICS R38 Cloud DIS OD 202202 LG E - 637807065150345733Documento397 páginasIICS R38 Cloud DIS OD 202202 LG E - 637807065150345733Learn vmajjaAinda não há avaliações
- Mid TermDocumento19 páginasMid Termop dapodikAinda não há avaliações
- Avaya Contact Center Select - GuideDocumento20 páginasAvaya Contact Center Select - GuideManmeet ShandilyaAinda não há avaliações
- Introduction To Embedded SystemsDocumento84 páginasIntroduction To Embedded SystemsGodofredo Luayon Jipus Jr.Ainda não há avaliações
- Ud en T: Bhoj Reddy Engineering College For WomenDocumento11 páginasUd en T: Bhoj Reddy Engineering College For Womenswarna_793238588Ainda não há avaliações
- Automatic Earthquake Detection and Phase Picking in Muong Te, Lai Chau Region An Application of Machine Learning in Observational Seismology in VietnamDocumento18 páginasAutomatic Earthquake Detection and Phase Picking in Muong Te, Lai Chau Region An Application of Machine Learning in Observational Seismology in Vietnamlakay73121Ainda não há avaliações
- Task 3 - Information - Asset - Management - Policy - V.0Documento15 páginasTask 3 - Information - Asset - Management - Policy - V.0Rex DanielAinda não há avaliações
- Vocabulary Related To TechnologyDocumento6 páginasVocabulary Related To Technologyestefania aranda jimenezAinda não há avaliações
- BRD TemplateDocumento2 páginasBRD TemplateAnonymous hur1IflTczAinda não há avaliações
- Ael 2002Documento458 páginasAel 2002magic1111Ainda não há avaliações
- Control Engineering August 2020Documento70 páginasControl Engineering August 2020jfer707Ainda não há avaliações
- Lab Exercise 2Documento27 páginasLab Exercise 2Tharini SridharAinda não há avaliações