Você também pode gostar
- Mecanique Du SolideDocumento129 páginasMecanique Du SolideSîdïMôhâmèdBën100% (1)
- (Megafileupload) ResumeCinematiqueDocumento5 páginas(Megafileupload) ResumeCinematiqueBadr HamidiAinda não há avaliações
- 01 - CinematiqueDocumento6 páginas01 - CinematiqueMohamed ChaabaneAinda não há avaliações
- 01 CinematiqueDocumento12 páginas01 CinematiqueImen LtaïefAinda não há avaliações
- Sigma 3 Physique Chimie 3 Eme Mathematiques T2 OcrDocumento345 páginasSigma 3 Physique Chimie 3 Eme Mathematiques T2 OcrMohamedBouguechaAinda não há avaliações
- CinématiqueDocumento16 páginasCinématiqueJaouad DiouriAinda não há avaliações
- Physique Tle PDFDocumento181 páginasPhysique Tle PDFtotondelin96% (26)
- Chapitre 4 CinematiqueDocumento19 páginasChapitre 4 CinematiqueAbeka Kader100% (1)
- Fiche Cinematique Du PointDocumento2 páginasFiche Cinematique Du PointGuy Ygal100% (5)
- Cinematique AnalytiqueDocumento5 páginasCinematique AnalytiqueDésiré TedAinda não há avaliações
- KinematicDocumento31 páginasKinematicSovann_LongAinda não há avaliações
- TD 1Documento8 páginasTD 1ilyasarmy0% (1)
- Module 4Documento54 páginasModule 4oclgi.oouAinda não há avaliações
- Cinematique AnalytiqueDocumento5 páginasCinematique AnalytiqueYouness SineAinda não há avaliações
- Cours - Cinmatique - GnralitsDocumento5 páginasCours - Cinmatique - GnralitsGiuliano SannaAinda não há avaliações
- Chapitre 3 CinématiqueDocumento13 páginasChapitre 3 CinématiqueBourezak CélineAinda não há avaliações
- 1597@0@11409 3xrGppJKamA Chapitre 10 - Cinématique Du PointDocumento43 páginas1597@0@11409 3xrGppJKamA Chapitre 10 - Cinématique Du PointanarelkhouryAinda não há avaliações
- Solide en Rotation CoursDocumento4 páginasSolide en Rotation CoursMehdi BnmssdAinda não há avaliações
- Cinema Ti QueDocumento8 páginasCinema Ti Quetaupin1992Ainda não há avaliações
- TD2 Cinematique Corrige PHY12ab 2014Documento13 páginasTD2 Cinematique Corrige PHY12ab 2014MohamedBejjaAinda não há avaliações
- Serie MecaDocumento6 páginasSerie MecakongokuspAinda não há avaliações
- TD MecaniqueDocumento8 páginasTD MecaniqueKhaDija KhaLdiAinda não há avaliações
- Chapitre 2 Cinematique Des SolidesDocumento40 páginasChapitre 2 Cinematique Des SolidesOthniel Meignan100% (2)
- La CinématiqueDocumento4 páginasLa CinématiqueOumar TraoréAinda não há avaliações
- Devoir1 23 24Documento3 páginasDevoir1 23 24NAJIM SOUADAinda não há avaliações
- TD Cinématique Avec SolutionDocumento9 páginasTD Cinématique Avec SolutionboudjellalinadjibAinda não há avaliações
- TDMeca 1Documento4 páginasTDMeca 1Ihsan Mokhlisse100% (1)
- 1.cinematique Du PointDocumento9 páginas1.cinematique Du PointMedway BenAinda não há avaliações
- Lecon Phy 1Documento4 páginasLecon Phy 1Hua WeiAinda não há avaliações
- Intro Mecanique Des FluidesDocumento46 páginasIntro Mecanique Des FluidesEmy ABAinda não há avaliações
- RotationDocumento14 páginasRotationالغزيزال الحسن EL GHZIZAL Hassane100% (1)
- Chapitre 1 VibrationDocumento21 páginasChapitre 1 VibrationMa NelAinda não há avaliações
- TD Mecanique Generale l2 - FasciculeDocumento14 páginasTD Mecanique Generale l2 - FasciculeBachirou GUEYEAinda não há avaliações
- TDsMECA2011 SCIDocumento33 páginasTDsMECA2011 SCIHussel DonkengAinda não há avaliações
- Mécanique de Solide - TDDocumento12 páginasMécanique de Solide - TDMoùm Mèd'Ainda não há avaliações
- TH - Quant.mvt - EtudDocumento21 páginasTH - Quant.mvt - EtudRaed NABLIAinda não há avaliações
- S7-Dynamique II - Série-CorrigéDocumento5 páginasS7-Dynamique II - Série-CorrigéKartigenAinda não há avaliações
- Mouvement de Rotation D'un Corps SolideDocumento34 páginasMouvement de Rotation D'un Corps SolidenourlalaAinda não há avaliações
- Chapitre 12, Les Lois de Newton, Cours, Activités, Exercices D'application, 2BAC BIOF, PR JENKAL RACHIDDocumento10 páginasChapitre 12, Les Lois de Newton, Cours, Activités, Exercices D'application, 2BAC BIOF, PR JENKAL RACHIDNour-DineAhrouyAinda não há avaliações
- TP Mecanique Sur Coussin DairDocumento2 páginasTP Mecanique Sur Coussin DairCheujeu chaldouAinda não há avaliações
- Chap1 Etude de MouvementsDocumento4 páginasChap1 Etude de MouvementsKhaoula KhemiliAinda não há avaliações
- 10TD Mecanique Cinematique Du Point Semestre1Documento4 páginas10TD Mecanique Cinematique Du Point Semestre1Esli AmbinintsoaAinda não há avaliações
- Travaux Diriges Sur Le Changement de ReferentielDocumento3 páginasTravaux Diriges Sur Le Changement de ReferentielThierry gbodamakouAinda não há avaliações
- Cours de Physique 2 - M21 SVT - S2 - 2015 Mécanique: 1. Introduction. Cinématique Du PointDocumento16 páginasCours de Physique 2 - M21 SVT - S2 - 2015 Mécanique: 1. Introduction. Cinématique Du Pointcont contaAinda não há avaliações
- CinematiqueDocumento16 páginasCinematiquevodounnouAinda não há avaliações
- Résumé Mécanique Du Solide (Tensorielle)Documento18 páginasRésumé Mécanique Du Solide (Tensorielle)باسم الجراية100% (1)
- TP1 Méca2 CycloïdeDocumento2 páginasTP1 Méca2 CycloïdeErwanAinda não há avaliações
- Relativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueNo EverandRelativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueAinda não há avaliações
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2No EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Ainda não há avaliações
- Équations différentielles: Les Grands Articles d'UniversalisNo EverandÉquations différentielles: Les Grands Articles d'UniversalisAinda não há avaliações
- Homographie: Homographie : transformations en vision par ordinateurNo EverandHomographie: Homographie : transformations en vision par ordinateurAinda não há avaliações
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésNo EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésNota: 4.5 de 5 estrelas4.5/5 (4)
- Dcouverte Des Roulements PDFDocumento5 páginasDcouverte Des Roulements PDFfatiham0% (1)
- Circuits Sur Mesure Au Maroc PDFDocumento1 páginaCircuits Sur Mesure Au Maroc PDFfatihamAinda não há avaliações
- Certificat MedicalDocumento1 páginaCertificat MedicalfatihamAinda não há avaliações
- Reglement de L InternatDocumento4 páginasReglement de L InternatfatihamAinda não há avaliações
- Tutorial RDM Le Mans Octobre 2012 Chamilo1.grenet - FR Ujf Main PDFDocumento8 páginasTutorial RDM Le Mans Octobre 2012 Chamilo1.grenet - FR Ujf Main PDFfatihamAinda não há avaliações
- Geome3 PDFDocumento14 páginasGeome3 PDFfatihamAinda não há avaliações
- DR Verin HydrauliqueDocumento13 páginasDR Verin HydrauliquefatihamAinda não há avaliações
- 5 MasseDocumento2 páginas5 Massefatiham100% (1)
- Equiv Anciens Nouveaux Cours BacDocumento11 páginasEquiv Anciens Nouveaux Cours BacfatihamAinda não há avaliações
- Plan Cours Mecanique VAS1 Potel GatignolDocumento3 páginasPlan Cours Mecanique VAS1 Potel GatignolJawad ChAinda não há avaliações
- BACCons Mécaniquedesfluides Exercices CH 2Documento3 páginasBACCons Mécaniquedesfluides Exercices CH 2fatihamAinda não há avaliações
- Fiche Presentation Spa MecamecatransfertDocumento2 páginasFiche Presentation Spa MecamecatransfertfatihamAinda não há avaliações
- 2327 FRDocumento67 páginas2327 FRfatihamAinda não há avaliações
- Exercice Boulons Piston CorrigeDocumento8 páginasExercice Boulons Piston CorrigefatihamAinda não há avaliações
- ExercicesfluidesréelsDocumento3 páginasExercicesfluidesréelsfatihamAinda não há avaliações
- Chap3 Ntabti - Physique.voila - Net DynamiqueDocumento6 páginasChap3 Ntabti - Physique.voila - Net DynamiquefatihamAinda não há avaliações
- BACCons Mécaniquedesfluides Exercices 03Documento2 páginasBACCons Mécaniquedesfluides Exercices 03fatihamAinda não há avaliações
- Iso 8528-10Documento20 páginasIso 8528-10Nora Taharbouchet100% (1)
- Chap 3 - Cours ME 2021-2022Documento21 páginasChap 3 - Cours ME 2021-2022BOUDOUR AYMENAinda não há avaliações
- TD Maintenance IDocumento6 páginasTD Maintenance IJe suis Je suisAinda não há avaliações
- Exercices Equilibre 3 Forces Bep IndustrielDocumento16 páginasExercices Equilibre 3 Forces Bep IndustrielEl Mehdi Akhatar0% (1)
- Moteur Piézo-ElectriqueDocumento26 páginasMoteur Piézo-Electriquechaima chaibAinda não há avaliações
- Ms GM MebroukiDocumento105 páginasMs GM MebroukiMouaad BousounaAinda não há avaliações
- PHY 304 Propagation PP - CopieDocumento34 páginasPHY 304 Propagation PP - CopieDedjima MamamAinda não há avaliações
- Physique Tout-En-un Pour La Licence - Cours, Applications Et Exercices CorrigésDocumento654 páginasPhysique Tout-En-un Pour La Licence - Cours, Applications Et Exercices Corrigésزكرياء بنحيرت67% (3)
- Huygens - Oeuvres Completes Vol XVI - Oeuvrescompltesd16huygDocumento620 páginasHuygens - Oeuvres Completes Vol XVI - Oeuvrescompltesd16huygrelax_mpg6406Ainda não há avaliações
- CoursMeddour F MatDocumento50 páginasCoursMeddour F MatghodbaneAinda não há avaliações
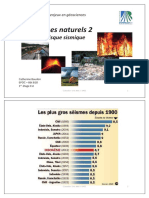
- Risques Naturels 2Documento21 páginasRisques Naturels 2Thomas HansenAinda não há avaliações
- Analyse Thermique Du Béton RéférenceDocumento17 páginasAnalyse Thermique Du Béton RéférenceMohamed ZITOUNIAinda não há avaliações
- Thermodynamique Part 3Documento39 páginasThermodynamique Part 3Mohammed AjjorAinda não há avaliações
- Formation RPS2011 14Documento78 páginasFormation RPS2011 14BVHTYZOAinda não há avaliações
- CHAP 6 CinématiqueDocumento4 páginasCHAP 6 Cinématiquehepived840Ainda não há avaliações
- OM - Contrôle 2014 - Correction - VBDocumento8 páginasOM - Contrôle 2014 - Correction - VBMarioAinda não há avaliações
- Solutions Contact Hertzien1Documento15 páginasSolutions Contact Hertzien1Talel pdfAinda não há avaliações
- Echographie OnlineDocumento77 páginasEchographie OnlineEric Louis-LeopoldAinda não há avaliações
- 3 - 2021 - Chapitre 1 - Fiche RécapitulativeDocumento1 página3 - 2021 - Chapitre 1 - Fiche RécapitulativeSalomé PasquierAinda não há avaliações
- Généralités Sur Le MouvementDocumento2 páginasGénéralités Sur Le Mouvementawacisko734Ainda não há avaliações
- Transfert3D-Equation de La ChaleurDocumento11 páginasTransfert3D-Equation de La ChaleurAbdelilah El KarbachiAinda não há avaliações
- Loi de NewtonDocumento1 páginaLoi de NewtonVictoria DoscaAinda não há avaliações
- (RDM) (FO) Formulaire RDMDocumento2 páginas(RDM) (FO) Formulaire RDMKamal ChaibAinda não há avaliações
- 1-Base Des Circuits ÉlectriquesDocumento48 páginas1-Base Des Circuits ÉlectriquesWilfre Arlexis RomeroAinda não há avaliações
- TD 2 Mip - Mipc 2020Documento2 páginasTD 2 Mip - Mipc 2020HEBATONAinda não há avaliações
- Cas Test3 PDFDocumento22 páginasCas Test3 PDFshaniceAinda não há avaliações
- Turbomachines (Turbine + Compresseur) CompletDocumento81 páginasTurbomachines (Turbine + Compresseur) CompletoussamaAinda não há avaliações
- Elements de Construction PDFDocumento21 páginasElements de Construction PDFzermiAinda não há avaliações
- Mémoire Perte de Charge - Rappels Bibliographiques PDFDocumento59 páginasMémoire Perte de Charge - Rappels Bibliographiques PDFyamina saghourAinda não há avaliações