Você também pode gostar
- Sis 103Documento8 páginasSis 103mykillerdroneAinda não há avaliações
- Info Iec61511-1 (Ed1.0) en PDFDocumento15 páginasInfo Iec61511-1 (Ed1.0) en PDFapeksha_837Ainda não há avaliações
- ISA S84.01 On ESD Valve TestingDocumento21 páginasISA S84.01 On ESD Valve TestingAZDOLMANAinda não há avaliações
- 632555Documento51 páginas632555Mahmoud Magdy RizkAinda não há avaliações
- Control Valves PRESENTATIONDocumento59 páginasControl Valves PRESENTATIONABVSAI100% (13)
- Info Iec61511-1 (Ed1.0) en PDFDocumento15 páginasInfo Iec61511-1 (Ed1.0) en PDFapeksha_837Ainda não há avaliações
- Training Center Information: TC Nürnberg-MoorenbrunnDocumento3 páginasTraining Center Information: TC Nürnberg-MoorenbrunnMahmoud Magdy RizkAinda não há avaliações
- System Overview: Simatic HmiDocumento14 páginasSystem Overview: Simatic HmiMahmoud Magdy RizkAinda não há avaliações
- Gas Velocity CalculatorDocumento4 páginasGas Velocity CalculatorNur Ezreen Fara MustaffaAinda não há avaliações
- System Overview: Simatic HmiDocumento14 páginasSystem Overview: Simatic HmiMahmoud Magdy RizkAinda não há avaliações
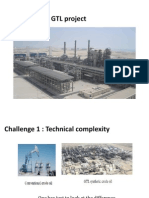
- Challenges of GTL ProjectDocumento5 páginasChallenges of GTL ProjectMahmoud Magdy RizkAinda não há avaliações
- MatlabDocumento45 páginasMatlabHamid SiAinda não há avaliações
- 2006-1214: Process Control: A Relevant Approach: Lecturer in Chemical Engineering, University of MichiganDocumento16 páginas2006-1214: Process Control: A Relevant Approach: Lecturer in Chemical Engineering, University of MichiganMahmoud Magdy RizkAinda não há avaliações
- 2006-1214: Process Control: A Relevant Approach: Lecturer in Chemical Engineering, University of MichiganDocumento16 páginas2006-1214: Process Control: A Relevant Approach: Lecturer in Chemical Engineering, University of MichiganMahmoud Magdy RizkAinda não há avaliações
- 001 CombineDocumento23 páginas001 CombineMahmoud Magdy RizkAinda não há avaliações
- 03 PressureFlowTheoryDocumento18 páginas03 PressureFlowTheoryMahmoud Magdy RizkAinda não há avaliações
- Piping: Kevin D. Rafferty, P.E. Geo-Heat CenterDocumento6 páginasPiping: Kevin D. Rafferty, P.E. Geo-Heat CenterMahmoud Magdy RizkAinda não há avaliações
- InsulationDocumento2 páginasInsulationMahmoud Magdy RizkAinda não há avaliações
- InsulationDocumento2 páginasInsulationMahmoud Magdy RizkAinda não há avaliações
- Norsok Process Design P100 Edition 3Documento42 páginasNorsok Process Design P100 Edition 3angry_granAinda não há avaliações
- 17 MGM enDocumento23 páginas17 MGM enMahmoud Magdy RizkAinda não há avaliações
- Triconex EmergencyShutdownDocumento8 páginasTriconex EmergencyShutdownMahmoud Magdy RizkAinda não há avaliações
- Piping: Kevin D. Rafferty, P.E. Geo-Heat CenterDocumento6 páginasPiping: Kevin D. Rafferty, P.E. Geo-Heat CenterMahmoud Magdy RizkAinda não há avaliações
- art%3A10.1007%2Fs12206 010 0618 7Documento10 páginasart%3A10.1007%2Fs12206 010 0618 7Mahmoud Magdy RizkAinda não há avaliações
- Comparison Horizontal Vs Vertical SeparatorDocumento54 páginasComparison Horizontal Vs Vertical SeparatorEng Kim Wei100% (6)
- RMIT Risk Management Procedure TABLE 1: Likelihood and Consequence CriteriaDocumento1 páginaRMIT Risk Management Procedure TABLE 1: Likelihood and Consequence CriteriaMahmoud Magdy RizkAinda não há avaliações
- Brochure Update2Documento20 páginasBrochure Update2Mahmoud Magdy RizkAinda não há avaliações
- B5 1R1Documento74 páginasB5 1R1Mohamed Osman AbdallaAinda não há avaliações
- Design Guide - Mist EliminatorsDocumento14 páginasDesign Guide - Mist EliminatorsLim Chee Siang100% (4)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Liquid SizingDocumento38 páginasLiquid SizingChetan ChuriAinda não há avaliações
- ITAD BIR RULING NO. 026-18, March 5, 2018Documento10 páginasITAD BIR RULING NO. 026-18, March 5, 2018Kriszan ManiponAinda não há avaliações
- Basic Resistance Training GP5Documento20 páginasBasic Resistance Training GP5matt.tubieron23Ainda não há avaliações
- 05 Astm Grain Size MeasurementsDocumento27 páginas05 Astm Grain Size MeasurementsnareshAinda não há avaliações
- B-701 Boysen Permacoat Flat Latex2Documento7 páginasB-701 Boysen Permacoat Flat Latex2ircvpandoAinda não há avaliações
- 9trffi&hpr.! Ni-: Use E EDocumento2 páginas9trffi&hpr.! Ni-: Use E ERafi ZulfiAinda não há avaliações
- 9) Expt No - 9 (Halleffect)Documento16 páginas9) Expt No - 9 (Halleffect)Pollack Prittam ChoudhuryAinda não há avaliações
- CTL Project Developer Perspective Coal - To - Liquids CoalitionDocumento27 páginasCTL Project Developer Perspective Coal - To - Liquids Coalitiondwivediashish2Ainda não há avaliações
- Ags 30Documento1 páginaAgs 30Anonymous jIzz7woS60% (1)
- Catalog Prince Hydraulic Cylinders Valves Pump Motors Accessories PDFDocumento123 páginasCatalog Prince Hydraulic Cylinders Valves Pump Motors Accessories PDFBruno CecattoAinda não há avaliações
- Global Projects Organisation: Material Specification For 316/316L and 6mo Austenitic Stainless SteelDocumento33 páginasGlobal Projects Organisation: Material Specification For 316/316L and 6mo Austenitic Stainless SteelThiyagarajan JayaramenAinda não há avaliações
- American National Standard Safety Signs: ANSI Z535.1-2016Documento42 páginasAmerican National Standard Safety Signs: ANSI Z535.1-2016Luis Enrique GonzalesAinda não há avaliações
- Bushing TestingDocumento8 páginasBushing TestingjoseAinda não há avaliações
- Global Environment Unit 2Documento13 páginasGlobal Environment Unit 2Se SathyaAinda não há avaliações
- Part 7 Mean Field TheoryDocumento40 páginasPart 7 Mean Field TheoryOmegaUserAinda não há avaliações
- Las Mapeh 9 q2 w6 HealthDocumento8 páginasLas Mapeh 9 q2 w6 HealthJemalyn Hibaya Lasaca100% (1)
- Better Place - Heaven or HellDocumento3 páginasBetter Place - Heaven or HellToto SammyAinda não há avaliações
- Aljac Sampler: Environmentally Acceptable, Operationally Efficient and Safe, Eliminating Any Product LossDocumento3 páginasAljac Sampler: Environmentally Acceptable, Operationally Efficient and Safe, Eliminating Any Product LossT. LimAinda não há avaliações
- Robotics Toolbox 9.6 TutorialDocumento149 páginasRobotics Toolbox 9.6 TutorialRogério Lopes100% (1)
- BTS "Whalien 52" Lyrics Romanization, English and Indonesian TranslationDocumento11 páginasBTS "Whalien 52" Lyrics Romanization, English and Indonesian TranslationEmaFediFeniAinda não há avaliações
- Us 5596162Documento9 páginasUs 5596162Stanley PinesAinda não há avaliações
- Lenskart Solutions PVT LTD Company ProfileDocumento13 páginasLenskart Solutions PVT LTD Company ProfileAnujaAinda não há avaliações
- Lake Superior RoadmapDocumento2 páginasLake Superior RoadmapWDIV/ClickOnDetroitAinda não há avaliações
- Wheatley Hp600 Quintuplex Plunger PumpDocumento2 páginasWheatley Hp600 Quintuplex Plunger Pumpmetasoniko2014Ainda não há avaliações
- Assay - Alumina and Magnesia Oral SuspensionDocumento3 páginasAssay - Alumina and Magnesia Oral SuspensionmaimaiAinda não há avaliações
- N100 Rle Back MassageDocumento24 páginasN100 Rle Back MassagerlinaoAinda não há avaliações
- Angle of Elevation and Depression For Video LessonDocumento35 páginasAngle of Elevation and Depression For Video LessonAlma Delos ReyesAinda não há avaliações
- bNSG9000 Datasheet 2Documento3 páginasbNSG9000 Datasheet 2RobertAinda não há avaliações
- EPTT5100 - Pressure - Temperature Sensor - 1308 - GDocumento2 páginasEPTT5100 - Pressure - Temperature Sensor - 1308 - GHendry Putra RahadiAinda não há avaliações
- Fate NumeneraDocumento24 páginasFate Numeneraimaginaari100% (1)