Você também pode gostar
- 02.3 - Dérivée Vectorielle - TD1Documento7 páginas02.3 - Dérivée Vectorielle - TD1AlaealeaAinda não há avaliações
- Capteur Et Actionneur PDFDocumento21 páginasCapteur Et Actionneur PDFousalhAinda não há avaliações
- Résumé Avec Exercices - Robotique Industrielle 2021-Partie 01Documento5 páginasRésumé Avec Exercices - Robotique Industrielle 2021-Partie 01FAWZI RONALDOAinda não há avaliações
- A.I.L. - Corrige - Quelques ExercicesDocumento4 páginasA.I.L. - Corrige - Quelques ExercicesSidi Abdallahi75% (4)
- Correction TD N°4 en RobotiqueDocumento5 páginasCorrection TD N°4 en RobotiqueOmar 95100% (1)
- Le Controle QualitéDocumento27 páginasLe Controle QualitéYassine El Ouadi100% (1)
- TD 07 Corrigé - Identification Temporelle Des SLCIDocumento5 páginasTD 07 Corrigé - Identification Temporelle Des SLCIHana Khemissi100% (2)
- Traité de L'idiotie - Clément RossetDocumento28 páginasTraité de L'idiotie - Clément RossetRonald MoelkerAinda não há avaliações
- Correction TD 1 Robotique 2021-2022Documento4 páginasCorrection TD 1 Robotique 2021-2022mina boucAinda não há avaliações
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocumento3 páginasTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyAinda não há avaliações
- TD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFDocumento49 páginasTD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFmukoAinda não há avaliações
- TP Moteur Courant Continu Par Retour D EtatDocumento15 páginasTP Moteur Courant Continu Par Retour D EtatSadam Zadam95% (22)
- TD - Modèle DynamiqueDocumento1 páginaTD - Modèle Dynamiquehocine benmaizaAinda não há avaliações
- TD N°1 Robotique Industrielle 2021Documento2 páginasTD N°1 Robotique Industrielle 2021Hocine BoukhiarAinda não há avaliações
- TD 08Documento4 páginasTD 08Abdou HamaouiAinda não há avaliações
- Travaux Dirigés Robotique 1 2020Documento4 páginasTravaux Dirigés Robotique 1 2020marwa hamdiAinda não há avaliações
- 01-Lecon1 Analyse Fonctionnelle 2012-13Documento8 páginas01-Lecon1 Analyse Fonctionnelle 2012-13Med Aymen Bensalem100% (1)
- TD 12 - Comportement Cinématique Des SystèmesDocumento10 páginasTD 12 - Comportement Cinématique Des Systèmesbhs channelAinda não há avaliações
- Calcul Des Incertitudes (Cours Etudiant DIP)Documento49 páginasCalcul Des Incertitudes (Cours Etudiant DIP)Timo ShmittAinda não há avaliações
- Chap02 - Modèle Géométrique Direct PDFDocumento19 páginasChap02 - Modèle Géométrique Direct PDFBadr Kaakoua100% (2)
- TD Cinc3a9matique100520 1Documento7 páginasTD Cinc3a9matique100520 1Mouh AktoufAinda não há avaliações
- TD 10 - Comportement Cinématique Des SystèmesDocumento4 páginasTD 10 - Comportement Cinématique Des Systèmesbhs channelAinda não há avaliações
- Bras A 4 AxesDocumento2 páginasBras A 4 AxesMohamed NaciriAinda não há avaliações
- 2010 2011 Solution TP 2 PDFDocumento2 páginas2010 2011 Solution TP 2 PDFspeedov73Ainda não há avaliações
- AOPa PDFDocumento23 páginasAOPa PDFcreateur006Ainda não há avaliações
- Cours 2 - Slci PDFDocumento71 páginasCours 2 - Slci PDFheryamAinda não há avaliações
- TD4 Machine ASynchroneDocumento2 páginasTD4 Machine ASynchroneDupontSaint0% (1)
- RapportDocumento28 páginasRapportrajid oumaimaAinda não há avaliações
- RobInd TD1 PDFDocumento2 páginasRobInd TD1 PDFUriel Nguefack100% (1)
- Exam Robotique 13 PDFDocumento2 páginasExam Robotique 13 PDFnasri imenAinda não há avaliações
- Khalil-Dombre Modelisation PDFDocumento52 páginasKhalil-Dombre Modelisation PDFspeedov73100% (1)
- Rdlo-Curvas 50 HZ PDFDocumento40 páginasRdlo-Curvas 50 HZ PDFEnrique EM100% (1)
- Exam ROBO012Documento1 páginaExam ROBO012Fleur D'espoirAinda não há avaliações
- Cours Robotique - Chap - CinematiqueDocumento19 páginasCours Robotique - Chap - CinematiqueOmar 95Ainda não há avaliações
- Chapitre 2Documento17 páginasChapitre 2Oussama AbirAinda não há avaliações
- 01 Td1 Rokisim RobotDocumento1 página01 Td1 Rokisim RobotHaitamElbathaouiAinda não há avaliações
- Examen Robotique 19Documento4 páginasExamen Robotique 19Gedeon LitengoAinda não há avaliações
- Exam Robotique 10 PDFDocumento2 páginasExam Robotique 10 PDFImed BarçaAinda não há avaliações
- Examen Elec 4 GSE 2011 RobotiqueDocumento2 páginasExamen Elec 4 GSE 2011 RobotiqueMohamed Oulad Chaikh100% (1)
- Klubprepa Extrait 4747Documento2 páginasKlubprepa Extrait 4747Asmaa KasmiAinda não há avaliações
- TP Robotique TP3 2021-2022Documento1 páginaTP Robotique TP3 2021-2022imenenouvelleAinda não há avaliações
- Exam Robotique 09Documento1 páginaExam Robotique 09org 2019Ainda não há avaliações
- TD2 - Cine - 2017 18Documento4 páginasTD2 - Cine - 2017 18Wael YossraAinda não há avaliações
- Can & CnaDocumento2 páginasCan & CnaAYOUB RIADAinda não há avaliações
- Iro 2Documento54 páginasIro 2HamzaKadAinda não há avaliações
- Système 3Documento9 páginasSystème 3akarne YounessAinda não há avaliações
- MASTER ASE 1ère Année. Unité - Modélisation & Identification - Travaux Pratiques 2009-2010Documento33 páginasMASTER ASE 1ère Année. Unité - Modélisation & Identification - Travaux Pratiques 2009-2010Alex PittAinda não há avaliações
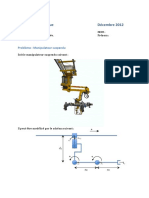
- ControleTheoryMecanismesDecember2018 PDFDocumento2 páginasControleTheoryMecanismesDecember2018 PDFHfgjj100% (1)
- Cours de Robotique-V3-18-12-2018Documento51 páginasCours de Robotique-V3-18-12-2018Omar 95Ainda não há avaliações
- Semestre 2 DS 4 2007-2008 Robot RRTDocumento7 páginasSemestre 2 DS 4 2007-2008 Robot RRTLarbi ElbakkaliAinda não há avaliações
- Robotique3 PDFDocumento13 páginasRobotique3 PDFjasen borneAinda não há avaliações
- Exam Robotique 06Documento2 páginasExam Robotique 06Jaouad Elfath100% (1)
- Robotique: Enseignant: Jean-Philippe RobergeDocumento45 páginasRobotique: Enseignant: Jean-Philippe RobergerabehvillaAinda não há avaliações
- Exam Robotique 07Documento2 páginasExam Robotique 07khadija lamrabetAinda não há avaliações
- Corrige Liais Equiv en ParalleleDocumento4 páginasCorrige Liais Equiv en ParalleleAyou HamAinda não há avaliações
- Chapitre-Introduction Aux Systèmes MécatroniquesDocumento8 páginasChapitre-Introduction Aux Systèmes Mécatroniquesoussama jouiniAinda não há avaliações
- Cours Automatique Linéaire Séance 1Documento17 páginasCours Automatique Linéaire Séance 1fakehiAinda não há avaliações
- EXAMENCORRIGE2003 WWW - CoursDocumento6 páginasEXAMENCORRIGE2003 WWW - Courskhaled kamel BouabdallahAinda não há avaliações
- Centre D Usinage 5 Axes CorrigeDocumento2 páginasCentre D Usinage 5 Axes CorrigeLAILA IDRISSIAinda não há avaliações
- 32 Fermeture Geo ExercicesDocumento4 páginas32 Fermeture Geo Exerciceslaalai faicelAinda não há avaliações
- EXERCICE 17.3-: Mecanique Du SolideDocumento3 páginasEXERCICE 17.3-: Mecanique Du SolideIngenieur EnsaAinda não há avaliações
- CI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocumento4 páginasCI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiAinda não há avaliações
- TD N 1 RobotiqueDocumento2 páginasTD N 1 RobotiqueHoumita AbdelkaderAinda não há avaliações
- Correction - EMD ROBOTIQUE 2020 BMS - Fabrication Mécanique Et Productique FMPDocumento5 páginasCorrection - EMD ROBOTIQUE 2020 BMS - Fabrication Mécanique Et Productique FMPomarAinda não há avaliações
- Cours Cinematique GraphDocumento11 páginasCours Cinematique GraphEtienne BouronAinda não há avaliações
- Cours S7 EtatDocumento70 páginasCours S7 EtatMoundherNasmlaheAinda não há avaliações
- TD 17 - Liaisons Équivalentes PDFDocumento5 páginasTD 17 - Liaisons Équivalentes PDFAbdelhakAinda não há avaliações
- RobInd Ch3p3 PDFDocumento24 páginasRobInd Ch3p3 PDFSi Mohamed RahiliAinda não há avaliações
- Cours AsservissementDocumento3 páginasCours AsservissementImed BarçaAinda não há avaliações
- Ex 9Documento3 páginasEx 9Imed BarçaAinda não há avaliações
- Cours MPCDocumento21 páginasCours MPCMostafa El Mokadem100% (1)
- Exam Robotique 10 PDFDocumento2 páginasExam Robotique 10 PDFImed BarçaAinda não há avaliações
- Cours Rob 4Documento25 páginasCours Rob 4electroblidaAinda não há avaliações
- PresComOpt PDFDocumento35 páginasPresComOpt PDFImed BarçaAinda não há avaliações
- Cours Rob 3 PDFDocumento32 páginasCours Rob 3 PDFImed Barça100% (1)
- Transformee de LaplaceDocumento5 páginasTransformee de LaplaceImed BarçaAinda não há avaliações
- TD1 AsservissementDocumento2 páginasTD1 AsservissementEden BenAinda não há avaliações
- Exercice TheveninDocumento3 páginasExercice TheveninHamdi Hamdi Ben RomdhaneAinda não há avaliações
- Abaque de BlackDocumento1 páginaAbaque de BlackImed BarçaAinda não há avaliações
- Matlab IntroDocumento32 páginasMatlab IntroImed BarçaAinda não há avaliações
- APolycopié UE3!22!23Documento162 páginasAPolycopié UE3!22!23dogal40484Ainda não há avaliações
- Cours Methodologie 3eme Année GU Classe Spéciale 1Documento66 páginasCours Methodologie 3eme Année GU Classe Spéciale 1yassinodzAinda não há avaliações
- Complex Book FinalDocumento118 páginasComplex Book Finalsawahkouba1Ainda não há avaliações
- Exercices Equilibre D Un Corps Saous Action 3 Forces 4Documento13 páginasExercices Equilibre D Un Corps Saous Action 3 Forces 4AtifAinda não há avaliações
- Exos Sur Lelectrolyse Du NaClDocumento3 páginasExos Sur Lelectrolyse Du NaClNB100% (1)
- AIRSUN - Brise Soleil Fixe Ou Mobile en Alu-4Documento2 páginasAIRSUN - Brise Soleil Fixe Ou Mobile en Alu-4Bcd CdeAinda não há avaliações
- Mechanical-Properties-Cours (Presentation)Documento28 páginasMechanical-Properties-Cours (Presentation)amir11sahli11Ainda não há avaliações
- TP Algorithme AvancéDocumento2 páginasTP Algorithme AvancéAdham NuiakhAinda não há avaliações
- Sujets MASAFEQ 2019 V 1 3 Oct24Documento18 páginasSujets MASAFEQ 2019 V 1 3 Oct24smailAinda não há avaliações
- TP KhodjaDocumento13 páginasTP KhodjafaroukAinda não há avaliações
- Exercice 1 (Points)Documento2 páginasExercice 1 (Points)belhadi.kAinda não há avaliações
- Peugeot 307 Break (Oct 2005 Mai 2006) Notice Mode Emploi Manuel Guide PDFDocumento194 páginasPeugeot 307 Break (Oct 2005 Mai 2006) Notice Mode Emploi Manuel Guide PDFCLAKOS100% (2)
- Exemple de Retro Calcul Sur CarriereDocumento87 páginasExemple de Retro Calcul Sur CarriereGhislain CordierAinda não há avaliações
- Programme Secondaire RemanieeDocumento16 páginasProgramme Secondaire Remanieedesrosesjeanrene6Ainda não há avaliações
- TD CorrDocumento19 páginasTD Corrfarah AfouzarAinda não há avaliações
- Texte Argumentatif PADDocumento14 páginasTexte Argumentatif PADEdward Alexander RojasAinda não há avaliações
- Cours Physiovégétale2Documento23 páginasCours Physiovégétale2Rachid AIT ELAYADAinda não há avaliações
- INTRODUCTIONDocumento29 páginasINTRODUCTIONsalahouchenesalahAinda não há avaliações
- La Couche Liaison de DonnéesDocumento21 páginasLa Couche Liaison de DonnéesLeila KararAinda não há avaliações
- ArithmetiqueDocumento10 páginasArithmetiqueHero ZargaAinda não há avaliações
- 1 Fondamentaux Gas LiftDocumento39 páginas1 Fondamentaux Gas Liftserge RinaudoAinda não há avaliações
- TransmissionDocumento20 páginasTransmissionIsmail BarbourAinda não há avaliações
- ButeeDocumento3 páginasButeePAUSE RACE100% (1)
- Chapitre2 Suites de Nombres RéelsDocumento16 páginasChapitre2 Suites de Nombres Réelsmohamed pharmAinda não há avaliações