Você também pode gostar
- Unmanned Aircraft SystemsNo EverandUnmanned Aircraft SystemsElla AtkinsAinda não há avaliações
- Wireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanDocumento24 páginasWireless Control Quadcopter With Stereo Camera: P.Manoj, S.GokulakannanManojAinda não há avaliações
- Validation of A Quad-Rotor Helicopter Matlab-Simulink and Solidworks Models - ABDocumento6 páginasValidation of A Quad-Rotor Helicopter Matlab-Simulink and Solidworks Models - ABNancy RodriguezAinda não há avaliações
- A Vision-Based Automatic Landing Method For Fixed Wing UAVsDocumento15 páginasA Vision-Based Automatic Landing Method For Fixed Wing UAVsAli YasinAinda não há avaliações
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionAinda não há avaliações
- Simulating Quadrotor UAVs in Outdoor ScenariosDocumento7 páginasSimulating Quadrotor UAVs in Outdoor ScenariosRodolfo Castro E SilvaAinda não há avaliações
- Hybrid PID LQ Quadrotor ControllerDocumento14 páginasHybrid PID LQ Quadrotor ControllerGhada BeydounAinda não há avaliações
- Atmel Studio Integrated Development Environment With FreeRTOS AwarenessDocumento8 páginasAtmel Studio Integrated Development Environment With FreeRTOS AwarenessAshok ObuliAinda não há avaliações
- ME4241 - Aircraft Performance and Stability Course Assignment Stability and Control of Quadcopter DronesDocumento7 páginasME4241 - Aircraft Performance and Stability Course Assignment Stability and Control of Quadcopter Dronesliuxc000Ainda não há avaliações
- TwincopterDocumento5 páginasTwincopterRinson RajAinda não há avaliações
- Spherical Vtol UavDocumento11 páginasSpherical Vtol UavPranab PrustyAinda não há avaliações
- SystemVision Intro TrainingDocumento205 páginasSystemVision Intro TrainingRafael SouzaAinda não há avaliações
- Object Detection in UAVsDocumento6 páginasObject Detection in UAVsEditor IJTSRDAinda não há avaliações
- Buat Camera Thermal DGN ArduinoDocumento4 páginasBuat Camera Thermal DGN ArduinoelkaAinda não há avaliações
- Image Processing in UAVDocumento11 páginasImage Processing in UAVVp Hari NandanAinda não há avaliações
- Uav 01 PDFDocumento62 páginasUav 01 PDFSahil GargAinda não há avaliações
- Autopilot Design of Tilt Rotor UAV Using Particle Swarm Optimization MethodDocumento5 páginasAutopilot Design of Tilt Rotor UAV Using Particle Swarm Optimization MethodMohammad Reza MadadiAinda não há avaliações
- RobotDocumento132 páginasRobotPhong Ngo100% (1)
- Attitude Control of A QuadrotorDocumento6 páginasAttitude Control of A QuadrotorGhada BeydounAinda não há avaliações
- DRS Pixhawk 2 17th March 2016Documento29 páginasDRS Pixhawk 2 17th March 2016Nguyen Trong NghiaAinda não há avaliações
- VTOL Modeling (Student)Documento5 páginasVTOL Modeling (Student)juanAinda não há avaliações
- 2021 - Design of A Small Qadrotor UAV and Modeling of An MPC-based SimulatorDocumento96 páginas2021 - Design of A Small Qadrotor UAV and Modeling of An MPC-based SimulatorterenceAinda não há avaliações
- Lab Manual - RTOS AchitectureDocumento6 páginasLab Manual - RTOS Achitectureritika jaiswalAinda não há avaliações
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocumento22 páginasAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetAinda não há avaliações
- BICOPTERDocumento22 páginasBICOPTERManideep Ananthula100% (4)
- GPS Denied NavigationDocumento3 páginasGPS Denied NavigationMj Viknesh100% (1)
- Presentation On:-Drones: Prepared by - Akarsht Pachyala (CSE '30')Documento9 páginasPresentation On:-Drones: Prepared by - Akarsht Pachyala (CSE '30')Akarshit PachyalaAinda não há avaliações
- Brock Technologies Antenna Pointing System V2 BrochureDocumento1 páginaBrock Technologies Antenna Pointing System V2 BrochureUAVs AustraliaAinda não há avaliações
- Design and Development of The Hardware For Vision Based UAV AutopilotDocumento6 páginasDesign and Development of The Hardware For Vision Based UAV AutopilotJoshua DanielAinda não há avaliações
- Presented By: Ranjeet Singh Sachin AnandDocumento24 páginasPresented By: Ranjeet Singh Sachin AnandSachin AnandAinda não há avaliações
- VHDL Test Bench For Digital Image Processing SystemsDocumento10 páginasVHDL Test Bench For Digital Image Processing SystemsMoazh TawabAinda não há avaliações
- Advanced Embedded System Design: Project ReportDocumento7 páginasAdvanced Embedded System Design: Project ReportSyed Akhlaq100% (1)
- Modelling & Control of A QuadrotorDocumento15 páginasModelling & Control of A Quadrotorvidc87Ainda não há avaliações
- Railway Anti-Collision System With Auto-Track Changing and Phis Plate Removal SensingDocumento4 páginasRailway Anti-Collision System With Auto-Track Changing and Phis Plate Removal SensingAshwini WalkeAinda não há avaliações
- Simulation Platform For QuadrotorDocumento2 páginasSimulation Platform For QuadrotorAmira HosnyAinda não há avaliações
- Project Report On: Currency Detection Using OpencvDocumento17 páginasProject Report On: Currency Detection Using Opencvsharma anupAinda não há avaliações
- Quadcopter - PPT 231Documento34 páginasQuadcopter - PPT 231Md Faiyaz Ahmed 2019RME53Ainda não há avaliações
- Thesis PDFDocumento86 páginasThesis PDFDjalal HoucineAinda não há avaliações
- A Mini Unmanned Aerial Vehicle (Uav) : System Overview and Image AcquisitionDocumento7 páginasA Mini Unmanned Aerial Vehicle (Uav) : System Overview and Image AcquisitionhougieAinda não há avaliações
- DRONES UpdatedDocumento13 páginasDRONES UpdatedAkarshit PachyalaAinda não há avaliações
- Aircraft Instrumentation and Systems, 1/e: Book Information Sheet Book Information SheetDocumento2 páginasAircraft Instrumentation and Systems, 1/e: Book Information Sheet Book Information Sheetm sai ravi tejaAinda não há avaliações
- Q.1 To Study Communication Guiding SystemDocumento19 páginasQ.1 To Study Communication Guiding SystemVijendra SolankiAinda não há avaliações
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocumento23 páginasAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetAinda não há avaliações
- Modelling and Control of A QuadrocopterDocumento10 páginasModelling and Control of A QuadrocopterAdi Mulyadi100% (1)
- DRONES UpdatedDocumento13 páginasDRONES UpdatedAkarshit PachyalaAinda não há avaliações
- FreeRTOS MelotDocumento39 páginasFreeRTOS MelotKonstantin BakunovAinda não há avaliações
- Design and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverDocumento10 páginasDesign and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverkoftamAinda não há avaliações
- Drone Project: Physics 118 - Final ReportDocumento13 páginasDrone Project: Physics 118 - Final ReportMahdi MiriAinda não há avaliações
- Fabrication of A Drone: A Major Project Report OnDocumento3 páginasFabrication of A Drone: A Major Project Report OnAzam Emaad100% (1)
- DC Motor Interface With Robot Operating System ROSDocumento30 páginasDC Motor Interface With Robot Operating System ROSMuhammad SaleemAinda não há avaliações
- Space Robotics Seminar ReportDocumento31 páginasSpace Robotics Seminar Reportsnobbcheater100% (1)
- CSM&S 3-Queueing ModelsDocumento45 páginasCSM&S 3-Queueing Modelsnatnael abateAinda não há avaliações
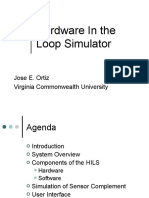
- Hardware in The Loop SimulatorDocumento40 páginasHardware in The Loop SimulatortrojanbkAinda não há avaliações
- Drone UavDocumento20 páginasDrone UavPooja BanAinda não há avaliações
- A Practical Animal Detection and Collision Avoidance System Using Computer Vision TechniqueDocumento7 páginasA Practical Animal Detection and Collision Avoidance System Using Computer Vision Techniquekeerthipati vinaykumarAinda não há avaliações
- Autonomous Uavs: Cooperative Tracking of Moving Targets by A Team ofDocumento9 páginasAutonomous Uavs: Cooperative Tracking of Moving Targets by A Team ofArun GopinathAinda não há avaliações
- 054-Micro Aerial Vehicles Design Challenges State of The Art ReviewDocumento17 páginas054-Micro Aerial Vehicles Design Challenges State of The Art Reviewkrishnamoorthy_krishAinda não há avaliações
- Kalman FilteringDocumento70 páginasKalman FilteringlalusebanAinda não há avaliações
- Expert Days 2018: SUSE Enterprise StorageDocumento15 páginasExpert Days 2018: SUSE Enterprise StorageArturoAinda não há avaliações
- Hydrajaws BT ManualDocumento15 páginasHydrajaws BT ManualEliana GuzmanAinda não há avaliações
- 1.1 Section 07 - GlideAjax PDFDocumento30 páginas1.1 Section 07 - GlideAjax PDFcamis_vieiraAinda não há avaliações
- VMware Cloud On AWS - Introduction To VMware Cloud On AWS For IT Practitioners 07july21 FINAL LEGAL APPROVEDDocumento41 páginasVMware Cloud On AWS - Introduction To VMware Cloud On AWS For IT Practitioners 07july21 FINAL LEGAL APPROVEDmasterlinh2008Ainda não há avaliações
- What Are The Outsourcing Options For An SME?Documento4 páginasWhat Are The Outsourcing Options For An SME?quocircaAinda não há avaliações
- Introduction To Computing:: Computer SystemsDocumento27 páginasIntroduction To Computing:: Computer SystemsPhan Giang ChâuAinda não há avaliações
- Final 05Documento8 páginasFinal 05Taha EtemAinda não há avaliações
- Training Quizz Ciena - Elcom.mobifoneDocumento3 páginasTraining Quizz Ciena - Elcom.mobifonephuongnt1710100% (2)
- 25-Unit4 8-CloudStorage SkyNetIoT Part7Documento16 páginas25-Unit4 8-CloudStorage SkyNetIoT Part7Shashank pratapAinda não há avaliações
- Pyronix kx10dpDocumento2 páginasPyronix kx10dpAchim HelmstedtAinda não há avaliações
- Complete Final Sem Report PDFDocumento79 páginasComplete Final Sem Report PDFbhanu pratap mishraAinda não há avaliações
- CPIN239 S05AssignDocumento2 páginasCPIN239 S05AssignJon0% (1)
- Asynchronous Counters Are Those Whose Output Is Free From The Clock SignalDocumento2 páginasAsynchronous Counters Are Those Whose Output Is Free From The Clock SignalayushAinda não há avaliações
- NRN40010 - ALCPlus2 - 010405 Rev1Documento20 páginasNRN40010 - ALCPlus2 - 010405 Rev1josecaarlosAinda não há avaliações
- VLSI &embedded SystemsDocumento38 páginasVLSI &embedded SystemsOLLURI ROHITAinda não há avaliações
- Cable Testing Means More UptimeDocumento56 páginasCable Testing Means More UptimesilvanacscorreaAinda não há avaliações
- SoundStructure Accessory GuideDocumento5 páginasSoundStructure Accessory GuideDario Campos AlcantaraAinda não há avaliações
- MIP COM2023 - Computer System FundamentalDocumento2 páginasMIP COM2023 - Computer System FundamentalmdmmonalissaAinda não há avaliações
- IOT Mod1Documento23 páginasIOT Mod1deepak mishraAinda não há avaliações
- Model TC8530: Ethernet & Data Fiber Optic MultiplexerDocumento2 páginasModel TC8530: Ethernet & Data Fiber Optic Multiplexeryounes bessamAinda não há avaliações
- Intelligent Control of Capillary Irrigation System For Water-Saving CultivationDocumento3 páginasIntelligent Control of Capillary Irrigation System For Water-Saving CultivationAnonymous 1aqlkZAinda não há avaliações
- 6 +Athena,+QuickSight,+EMRDocumento63 páginas6 +Athena,+QuickSight,+EMRAhmad HammadAinda não há avaliações
- It 601 PPPTTTTTTTTTTT FinalllllllDocumento20 páginasIt 601 PPPTTTTTTTTTTT Finallllllljohncena9999Ainda não há avaliações
- CP01393S 04 en 01.19Documento1 páginaCP01393S 04 en 01.19omarAinda não há avaliações
- Intel® Processor Reference Chart - Desktop PcsDocumento6 páginasIntel® Processor Reference Chart - Desktop PcsElvandro RahadityaAinda não há avaliações
- Development Kit (Or JDK For Short, and SE Means Standard Edition) - Basically, A JDK ContainsDocumento9 páginasDevelopment Kit (Or JDK For Short, and SE Means Standard Edition) - Basically, A JDK ContainsRhine AltaAinda não há avaliações
- I/A Series Hardware: ® Product SpecificationsDocumento20 páginasI/A Series Hardware: ® Product Specificationsrasim_m1146Ainda não há avaliações
- 802.1ag - CFM Tutorial - Part 1 v2Documento22 páginas802.1ag - CFM Tutorial - Part 1 v2prashant_1usAinda não há avaliações
- Module 4 Software Analysis and DesignDocumento14 páginasModule 4 Software Analysis and Designhanif malgundkarAinda não há avaliações
- Computer NetworksDocumento47 páginasComputer NetworksJeena Mol AbrahamAinda não há avaliações
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureNo EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureNota: 4.5 de 5 estrelas4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindAinda não há avaliações
- SAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildNo EverandSAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildNota: 5 de 5 estrelas5/5 (5)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsAinda não há avaliações
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!No EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Nota: 4 de 5 estrelas4/5 (3)
- Digital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSNo EverandDigital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSAinda não há avaliações
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsNo EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsNota: 5 de 5 estrelas5/5 (3)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.No EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Nota: 4 de 5 estrelas4/5 (5)
- The AI Generation: Shaping Our Global Future with Thinking MachinesNo EverandThe AI Generation: Shaping Our Global Future with Thinking MachinesNota: 4 de 5 estrelas4/5 (2)
- Building with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksNo EverandBuilding with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksAinda não há avaliações
- Practical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)No EverandPractical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)Ainda não há avaliações
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityNo EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityNota: 3.5 de 5 estrelas3.5/5 (22)
- Artificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesNo EverandArtificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesNota: 5 de 5 estrelas5/5 (2)
- Dark Aeon: Transhumanism and the War Against HumanityNo EverandDark Aeon: Transhumanism and the War Against HumanityNota: 5 de 5 estrelas5/5 (1)
- Arduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!No EverandArduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Nota: 3 de 5 estrelas3/5 (1)
- Artificial Intelligence: From Medieval Robots to Neural NetworksNo EverandArtificial Intelligence: From Medieval Robots to Neural NetworksNota: 4 de 5 estrelas4/5 (4)
- How to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionNo EverandHow to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionNota: 3.5 de 5 estrelas3.5/5 (129)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessAinda não há avaliações
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityNo EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityNota: 4.5 de 5 estrelas4.5/5 (3)